基于平行四连杆机构的垂直入土式玉米穴播机设计与试验*
2022-09-21 03:06王祎才杨正李晓军杨海兰寇明杰
中国农机化学报 2022年10期
王祎才,杨正,李晓军,杨海兰,寇明杰
(1. 甘肃畜牧工程职业技术学院,甘肃武威,733006;2. 甘肃省机械科学研究院有限责任公司,兰州市,730010)
0 引言
甘肃省绝大多部分地域处于干旱半干旱区域。近年来随着国家祁连山生态战略计划和“十四五”规划的实施,建设“绿水青山就是金山银山”的生态理念不断深入人心。旱地玉米全膜覆盖双垄沟播种技术,就是在传统的地膜覆盖技术基础上,采用垄沟播种的方式进行。该项技术是一项集雨、保墒、保湿、抗旱、抗病虫害的一项实用新技术[1-3]。该项技术有机地结合了地膜覆盖与垄沟种植技术特点,其主要显著特点就是在深秋或初春季节先起好宽、窄不同的双垄,同时对地表进行全膜覆盖,待播种期适时地在沟内进行点播,可有效接纳降水、增加地温、减少蒸发,并起到改善作物的生长环境,提高水分利用率等效果。生产实践表明,全膜双垄沟播种技术比普通的地膜覆盖栽培单产增幅超过30%[4-5],增产效果显著,收到良好的经济效益,已在甘肃省乃至全国广泛推广。
由于甘肃省绝大部分地区均为半干旱和干旱区域,保护地膜不被破坏成为种植前期的重点。目前,技术成熟的垂直入土式全膜覆盖双垄沟播种机具在我省尚为空白,至今还没有一套适合我省的垂直入土式全膜覆盖双垄沟播种机具。现有的垂直入土式全膜覆盖双垄沟播种机具均停留在设计试验阶段,主要以甘肃省农业鉴定总站刘军干等[6-7]设计的直插式覆膜小麦播种机,甘肃农业大学工学院赵武云等[8-9]研制的偏心轮补偿式直插式穴播机为研究对象。而玉米精密穴播器已基本成形,而玉米点播器、手推式玉米穴播机均使用人力操作,劳动强度高,生产效率低。传统玉米穴播机在播种时易出现挑膜、撕膜等现象,因此播种质量不高,不能大面积推广和使用。
针对上述存在的问题,本文在前期直插式玉米穴播器[10]研究的基础上,重新设计了适合于全膜覆盖双垄沟播种的垂直入土式玉米穴播机构[11-12]。通过对垂直入土式机构的设计,确保平行四连杆机构控制的成穴器鸭嘴垂直入土出土,保证成穴器能够模拟人工的“插”播动作。并对成穴器的运动轨迹进行了分析,同时还利用SolidWorks三维设计软件对整机进行了参数化设计,使用SolidWorks motion和ADAMS软件对整机进行运动仿真分析。
1 整机结构与工作原理
1.1 整机结构
垂直入土式玉米穴播机主要由机架、左轮圈、挡圈、偏心轮、水平调节手柄、排种轴、六幅转轮、接种管、连杆、成穴器、勺轮式排种器、右轮圈、轮圈连接块等组成,其具体结构如图1所示。

图1 垂直入土式穴播机组成
1.2 样机技术参数
垂直入土式玉米穴播机的主要参数见表1所示。
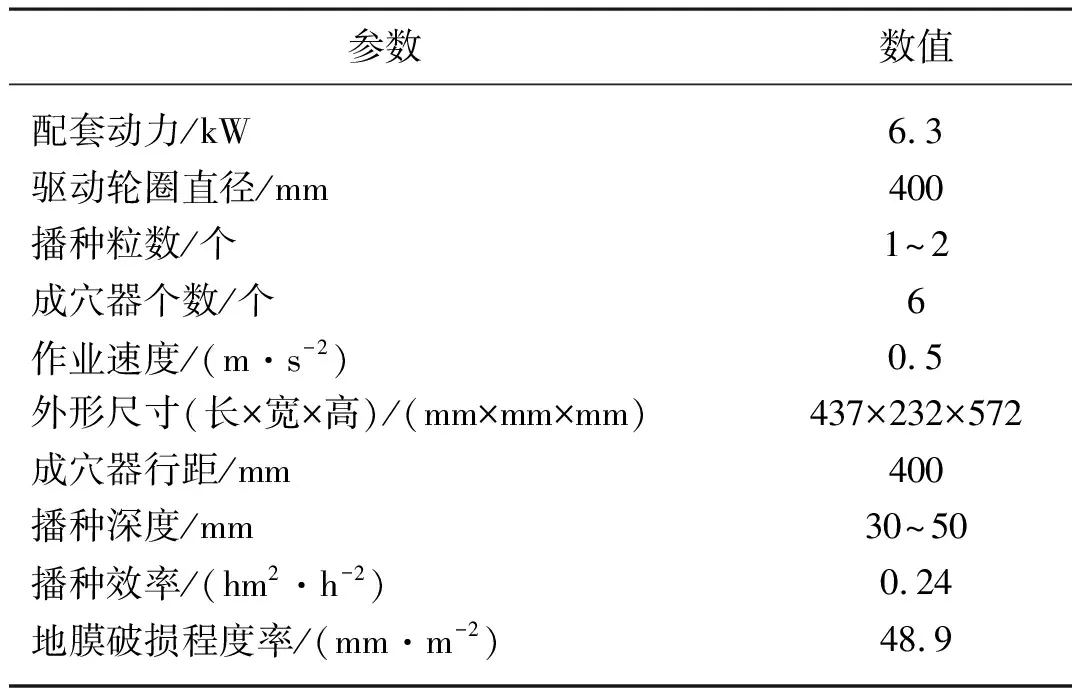
表1 垂直入土式玉米穴播机技术参数Tab. 1 Technical parameters of vertical submerged corn hole seeder
更换成穴器可以实现不同种子的播种,如大豆等。更换轮圈实现不同株距的播种,能够实现200~500 mm的株距。
1.3 工作原理
如图2所示,经种箱装入排种器壳中的玉米种子在机具转动的带动下带动导种轮,将排种勺轮中的种子(1~2粒)随着机具的持续转动,导种轮腔体中将种子带至垂直下端时跌入接种盒中。随后由成穴器将种子送入土壤中。随着机具的不断转动,成穴器[13-14]的鸭舌在强排档拐的作用下打开并完成一个穴位种子的播种,随着机具的转动,种子连续地从成穴器中进行循环播种,进行地上或膜上作业。种子运动轨迹如图3所示。
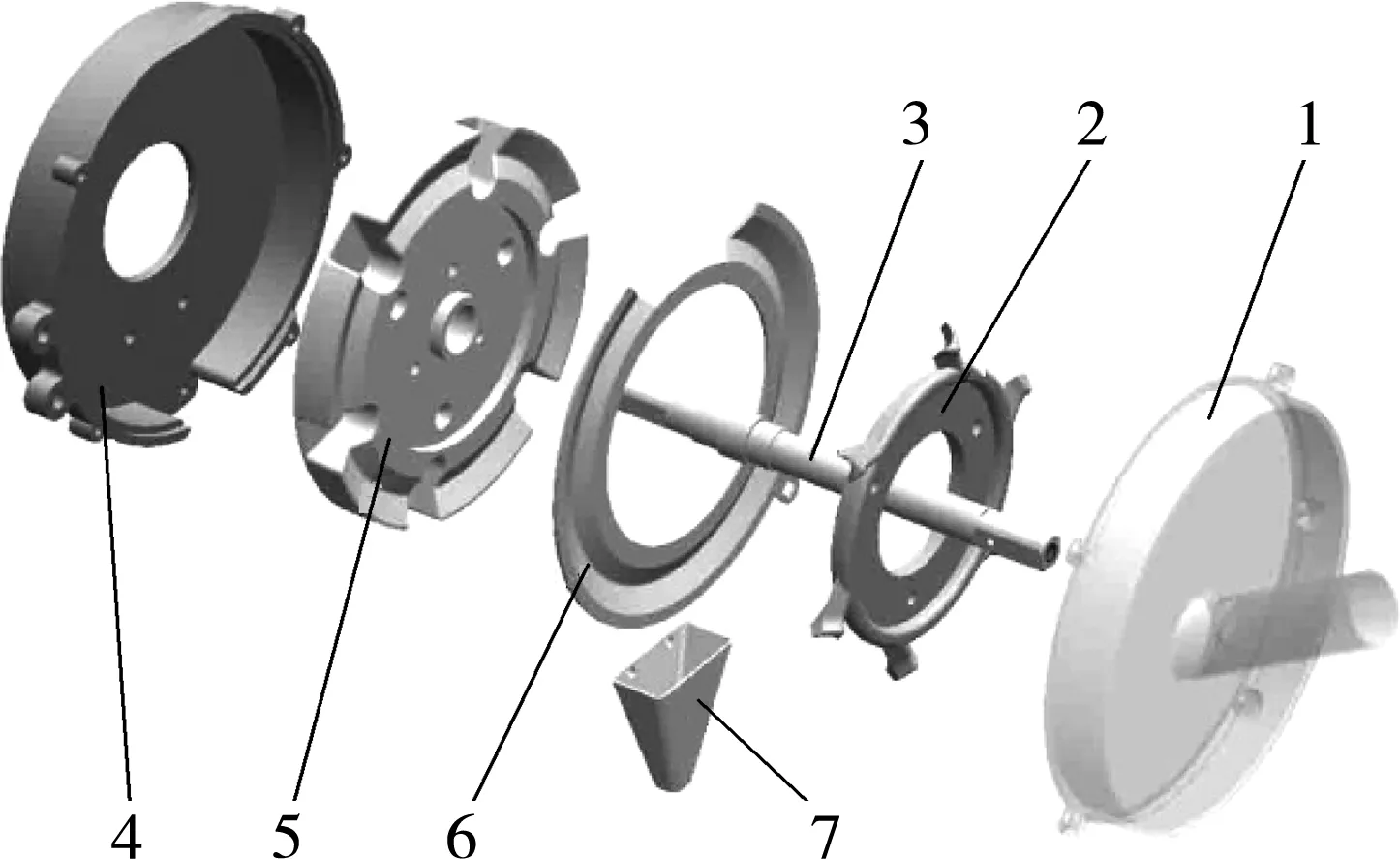
图2 排种器的组成
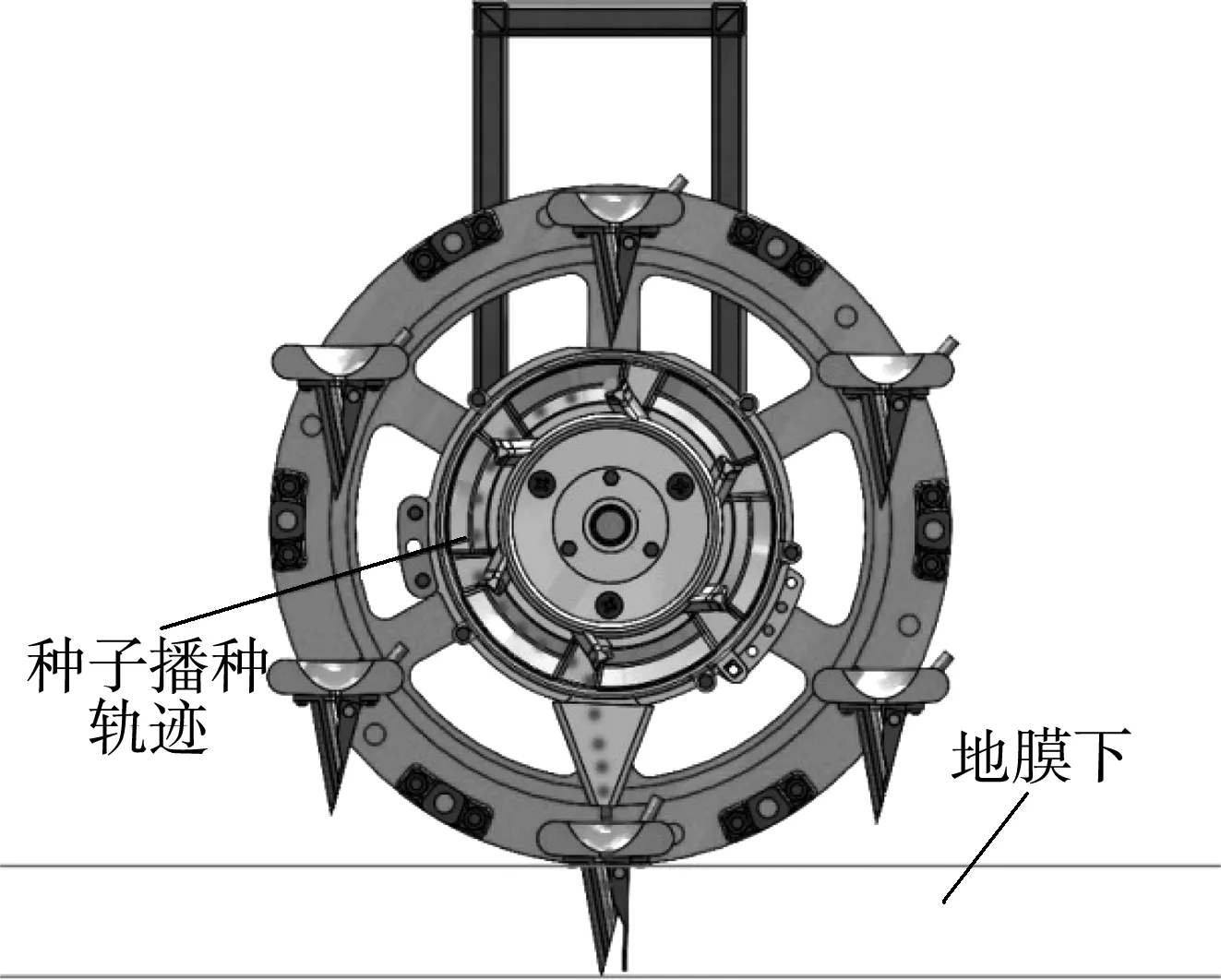
图3 种子运动轨迹
采用平行四边形机构原理,固定平行四边形上的一对边保持固有的水平位置,安装在平行四边形底边上的成穴器与四边形一个边呈90°垂直布置,即成穴器保持了垂直的向下,实现了直插动作,使种子通过垂直入土和垂直出土的工作部件—成穴器,直接进入土壤的合适位置,从而省去了开沟和覆土工作环节,并且不破坏地膜,实现垂直入土、出土并保证成穴器沿前进方向的绝对速度为0[15-16]。
2 垂直入土式机构设计
平行四连杆是机械常用的机构,因其具有保持一定的角度和两对边始终平行的特性,广泛用于机械设计中。如谷物收获机械中的拨禾轮机构。本设计便是采用平行四连杆机构。
平行四连杆若一端连杆固定,则无论怎么旋转其他杆件,均能保持固定的角度和位置。若在底端的短连杆上安装有垂直与地面的成穴器,这样就可以保证每个成穴器均能垂直入土与出土。如图4所示,由短连杆和长连杆构成的平行四连杆机构经过使用支撑圈圆盘和六辐转轮替代,即可实现平行四连杆机构的功能。支撑圈与地面接触最低点时前进的绝对速度为0,垂直上下的变化随着机具的前进运动而变化。同时通过调节手柄还可以设置插入角度是向前倾斜或向后倾斜,从而保证入土的角度。
从成穴器入土tr开始时至播种到一定的播深ts时,又从一定的播深S至离开地膜tc时,建立参数方程式[17-19]为
式中:xr、xs、xc——tr、ts、tc时刻成穴器的值;
l——xoy原点到第一个穴孔之间的距离;
n——穴孔数量,穴孔数量为6个;
P——穴位之间的距离(株距),设计株距为200 mm;
α——系数;
t——时间变量。
则成穴器在各个时刻的前进速度为
本文设计的垂直入土式平行四连杆机构如图5所示,其D点的运动轨迹即是垂直入土运动的轨迹,是与平行四连杆机构上短连杆连接的固定呈90°布置的成穴器顶点。成穴器D点受到地膜土壤的作用力时,C点以D点为圆心做圆周运动,C点位移量的大小取决于地膜滑移率。D点未受到地膜土壤外力作用时,在重力作用下,通过铰链点C保持垂直入土状态。C、D点运动轨迹如图6所示。
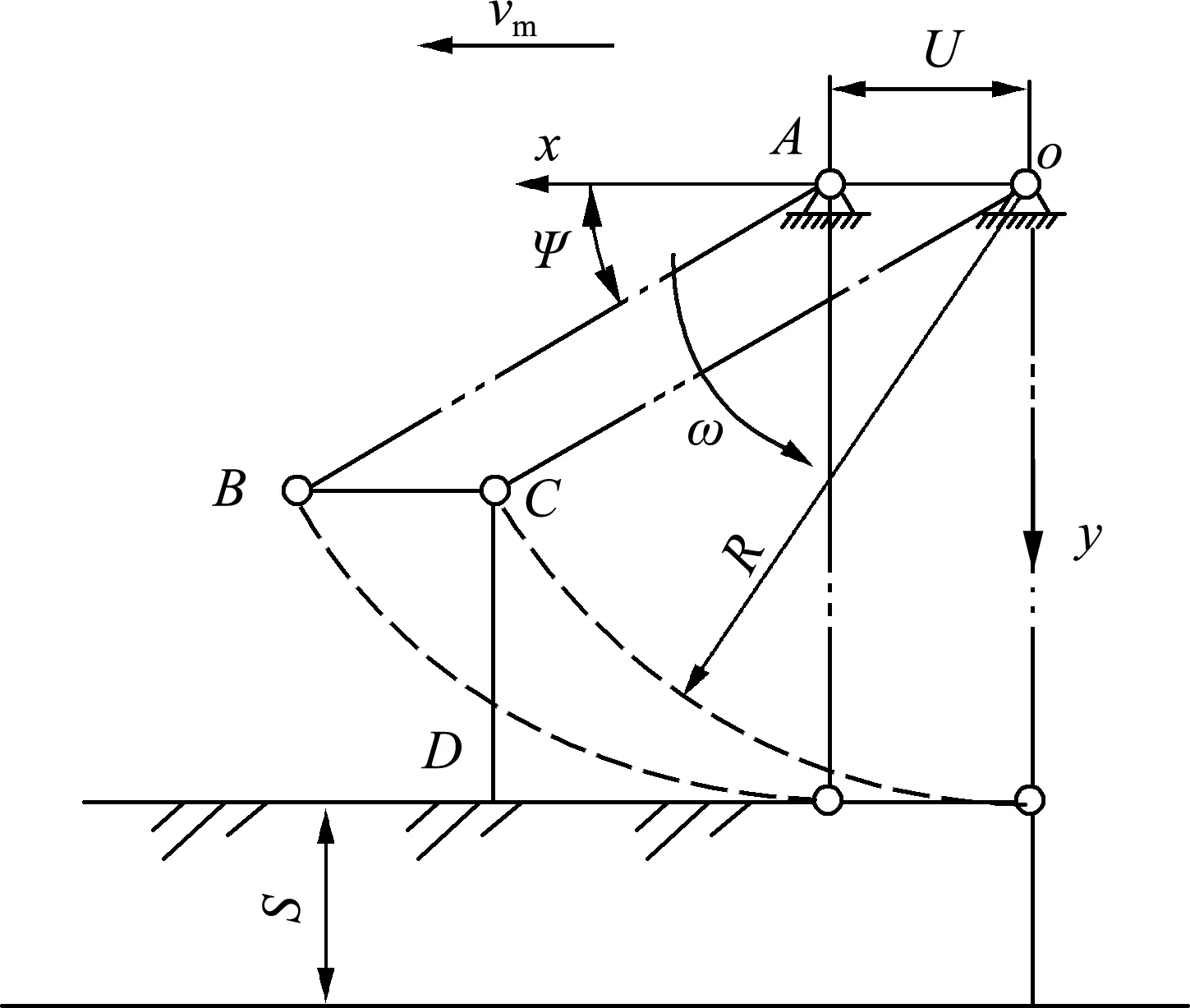
图5 垂直入土式穴播机机构原理图

图6 垂直入土式穴播机成穴器轨迹
2.1 运动轨迹过程分析
1) 铰接点C做余摆线运动,只要在满足地膜滑移率一定的情况下,C点的运动轨迹才能形成余摆线的闭环曲线,闭环曲线的宽度E由垂直入土式穴播机前进沿x方向的速度vm和C点绕着O点圆周运动的切线速度V之比值来确定,即
成穴器垂直入土、出土时:当C点运动至Cr时为入土行程,Cr点至Cc点时为出土行程。闭环曲线上最大的圆弧CrCc点的绝对速度Ur是垂直向下的。而Cc点此时的绝对速度却是向上的。闭环曲线一半的高度应为播种深度S=50 mm,闭环曲线上最大的宽度E是C点在成穴器运动过程中tr时刻至tc时刻沿着x方向上最大的移动量。
2) 机具沿着x方向上前进的速度是vm=500 mm/s,C点的切线速度则为V=Rω=602.4 mm/s,成穴器此时铰接点C点的余摆线运动轨迹方程式为
式中:R——成穴器铰接点至排种轴之间的距离(长连杆的长度为200 mm)。
3) 闭环曲线最大宽度CrCc的距离计算。如图7所示,成穴器入土和出土过程中,平行四连杆机构上C点的转动角分别为θr=56.80°(设计值)和θc=123.20°(设计值)。目前已知Cr和Cc点处的速度导数为0,即

推导后得
θr=π-arcsinλ
从整句看,这是对比的最佳使用:当听者沉浸于对秀才的失利的叹息,词作者却将笔锋一转,画面切换到秀才与妻子相处的画面。“风雪之中咳嗽/依偎在她胸口”既是写夫妻情谊,又是贫贱夫妻身份的交代。至此“离开清贫如水巷口便不再回头”的种子在秀才心中扎根,而妻子仍等在原处。丈夫的“动”与妻子的“静”形成对比;但同时“她立春/她立秋/她人比黄花瘦/霜白了头”,可见妻子也是动态的。这样动与静的二人之间的对比、静中有动的妻子主观“不动”但客观却老去的对比可以说几乎是完美显现了两者之间的区别,也预示了悲剧的必然性。
θc=arcsinλ
将θr和θc代入摆线方程式中,即
xr=R[λ(C-θc)-cosθc]
xc=R(λθc+cosθc)
计算得闭环曲线最大的宽度

图7 成穴器入土和出土时连杆OC转角的变化
4) 计算出土角、入土角。由图8可知,成穴器上承载点C分别处于Cr和Cc时,成穴器顶点D点进入土壤和离开土壤,则有以下公式
5) 对D点进入土壤时进行分析。如图8所示,成穴器最低端D点插入土壤中,理想状态下穴形孔位呈现“V”字形,然而由于土壤的挤压或地膜的滑移等因素,使得成穴器的形状呈现不规则的穴形。由于平行四连杆机构的连杆B、C、D在B点上会做相对的运动滑移,故成穴器穴形最大的宽度TrTc有以下公式
式中:p——连杆长度,60 mm。
因为S、p、CrCc均是结构设计参数,均为已知数据,所以可以计算出TrTc=10.956 mm。

图8 成穴器形成的穴形图
2.2 SolidWorks仿真分析
将建立好的样机实体模型在SolidWorks motion中进行仿真分析。机具前进的速度vm与机具滚动转动的速度Vx存在以下关系,如图9所示。
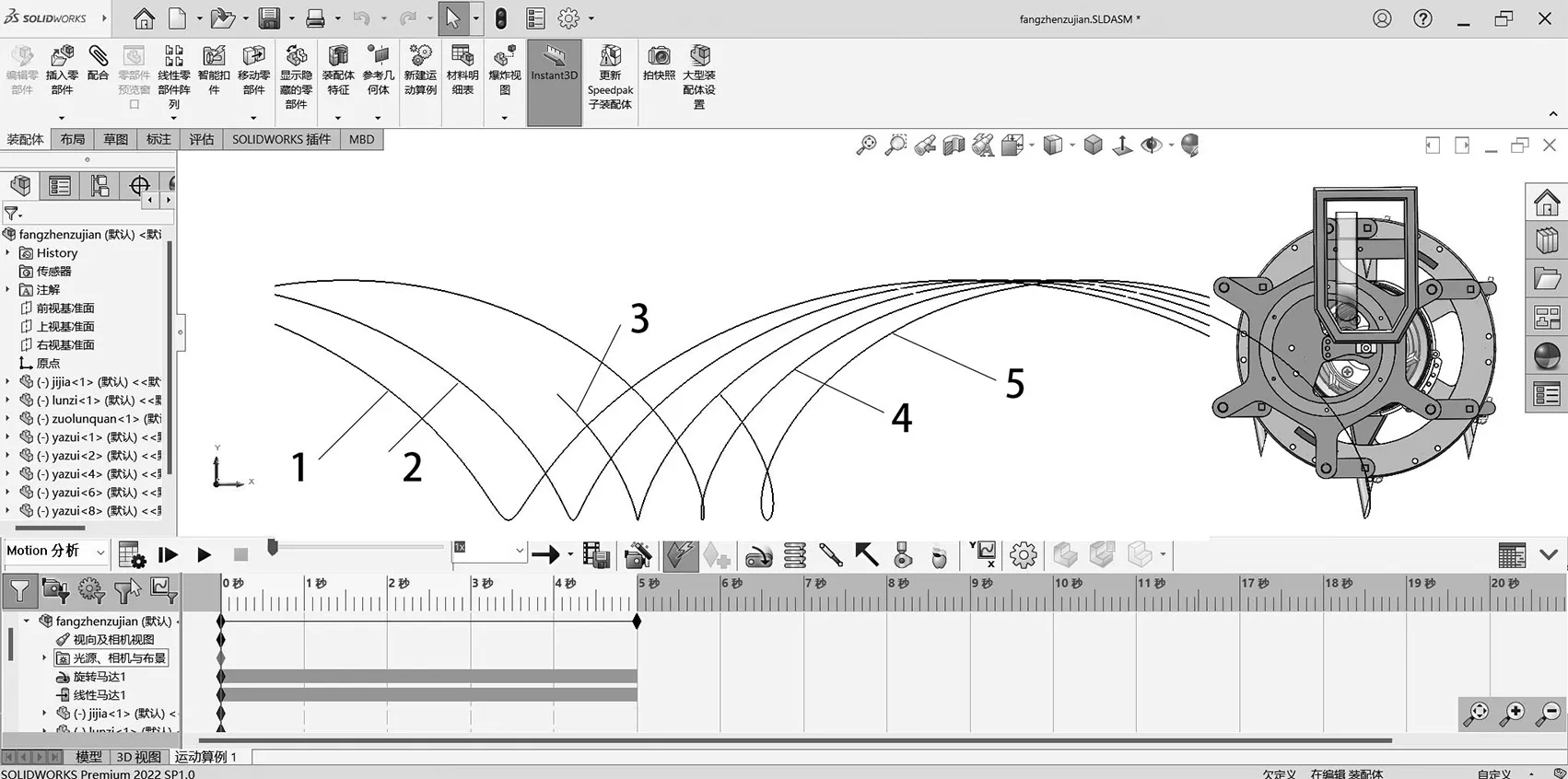
图9 SolidWorks轨迹仿真分析
基于以上分析得出,3号曲线为接近理想的垂直入土和出土动作。
2.3 ADAMS模拟仿真
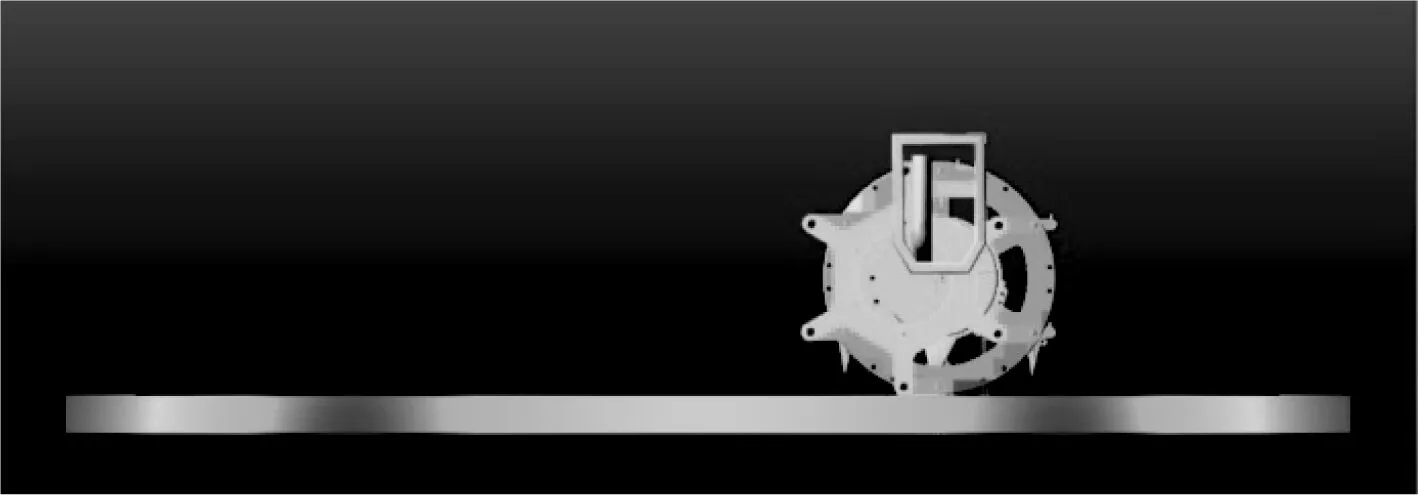
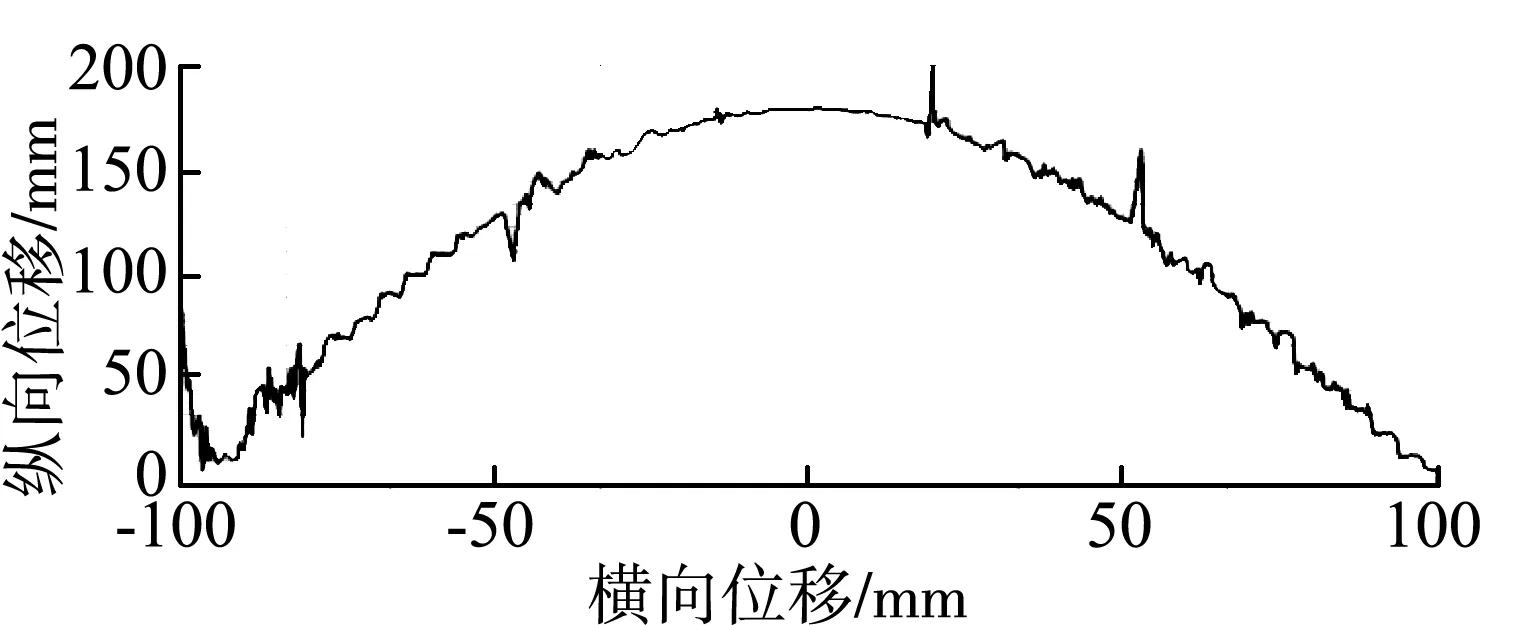
为了再一次验证垂直入土式穴播机的运动轨迹是否符合设计的要求,是否解决了撕膜和种穴错位等问题。将SolidWorks中设计的样机模型导入ADAMS软件中。使用ViewFlex柔性体将地面转换为柔性体模块。使其更加逼真模拟地膜上作业的过程。材料上选择橡胶皮带rubber_belt来模拟地膜。完成仿真后使用ADAMS中的创建点的轨迹分析运动的轨迹情况。为了便于观察,需在成穴器的鸭嘴上创建标记点Marker点相对于对面的运动轨迹情况。成穴器上Marker点生成的轨迹见图10所示。
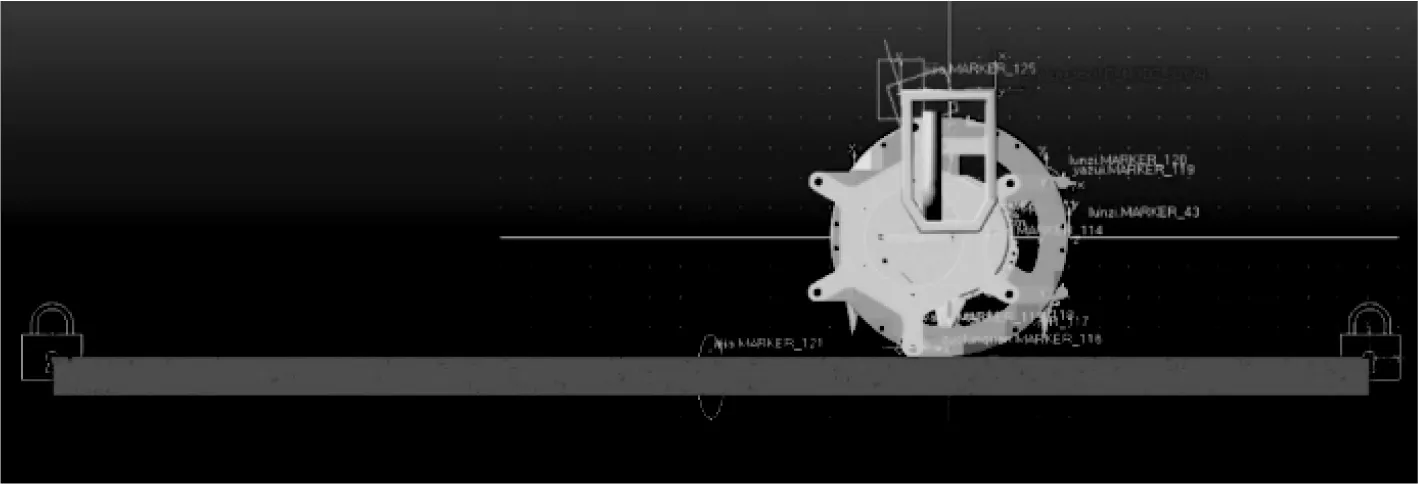
(a) 添加约束
(b) 仿真过程
(c) 仿真结果
仿真过程忽略成穴器强制开启机构的延迟、土壤的含水率以及播种深度等因素。依照垄沟播种中的农艺要求,成穴器的播种深度为50 mm,由图10(c)可知,满足播深要求。同时可以看出,其播种时成穴器的运动轨迹不是余摆线,而是V型曲线,从而克服了传统穴播器撕膜、种穴错位等问题。通过上述的设计、推算与分析,平行四连杆机构能够达到垂直入土、出土的直插动作,更好地提高了播种效率。
3 田间试验与分析
3.1 试验材料与方法
垂直入土式玉米穴播机田间的播种试验[20-21]在甘肃省临洮县五里铺甘肃洮河拖拉机制造有限公司后院试验场地进行。试验田地地势平整,南北走向,呈方形,土壤含水率为13.6%~16.9%,土壤坚实度为1 059.7 kPa,试验前,地面进行了整地和铺膜。
采用的玉米种子为宁单12号种子,1 000粒质量为370 g,玉米含水率为12.1%,种子大小平均值为8.122 mm×7.653 mm×4.966 mm,播种量为45.0 kg/hm2。动力采用东风12 kW手扶拖拉机,前进速度为0.5 m/s。完成整个作业后按照NY/T 987—2006《铺膜穴播机作业质量》[22]标准对垂直入土式玉米穴播机进行测定与计算。计算机具播种时种子的播深、地膜破损程度大小等试验数据。
3.1.1 种子的播深、穴位错孔率以及穴粒数的测定
以样机作业1.2 m幅宽,长宽10 m为一个作业区域。测定作业区域内所有的空穴、穴位错位等。使用长钢卷尺人工进行测量。按照最上层和最下层覆盖的种子以及土壤厚度、种穴不同步测定个数。
式中:z——总测定种穴个数;
Kx——空穴个数;
Ck——空穴率;
Qx——播深合格个数;
Cl——播深合格率;
Rx——膜穴错位占种穴直径一半以上的个数;
Cc——错位率。
取作业区域的5个种穴为平均值进行计算。
3.1.2 地膜采光面机械破损率的测定
测定试验播种区域的地膜。宽度为幅宽,取长度5 m,计算地膜破损程度。
式中:δ——地膜破损程度,mm/m2;
Li——播种区域内第i处地膜破损程度,mm;
b——地膜采光面的平均宽度值。
取作业区域的5个种穴为平均值进行计算。
3.2 试验结果分析
使用上述测定方法测定数据结果见表2所示。
由表2可知,垂直入土式玉米穴播机作业后种子的空穴率为0.62%,播种深度合格率为94.2%,膜下种穴错位率为0.8%,地膜破损程度率为48.9 mm/m2。各项指标均在农业农艺技术标准NY/T987—2006《铺膜穴播机作业质量》的评价技术规范要求范围内。播种作业过程中,样机基于双垄沟沟底处进行作业,作业性能稳定可靠,且在水平分速度上能够保证绝对为0,更好地解决了不挑膜、不撕膜和种穴不错位等技术难题,各项试验规范均在农艺试验要求基础上进行的[23-24],各项试验数据均满足农艺技术指标要求。
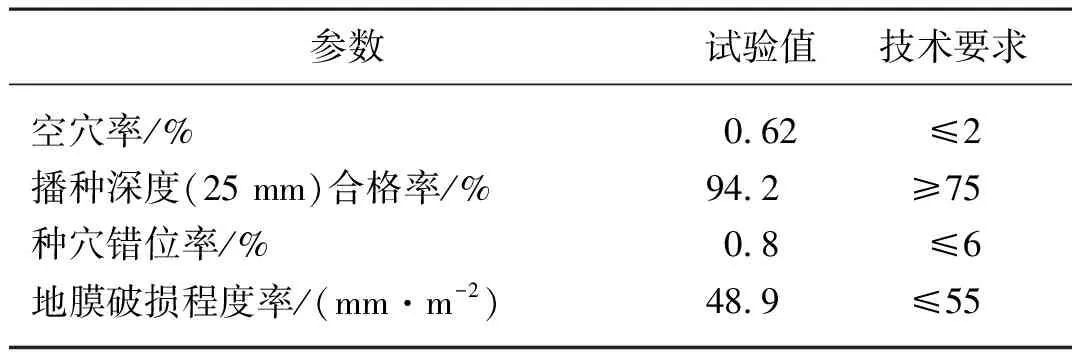
表2 田间试验播种机性能结果Tab. 2 Field trial planter performance results
4 结论
1) 为了更好地解决传统穴播机由于播种过程中的挑膜、撕膜、种穴错位等问题,设计了垂直入土式玉米穴播机。垂直入土式玉米穴播机是一种基于平行四连杆机构,播种过程中能保证成穴器的入土和出土垂直向下,且水平绝对分速度为0。更换穴播盘还可以实现多种株距播种。
2) 根据设计和仿真数据,垂直入土式玉米穴播机的长连杆为180 mm,播深为50 mm,机具前进速度为500 mm/s,入土角为48.59°,出土角为131.41°。滑移产生的最大交叉曲线宽度为10.798 mm,入土和出土时的最大V型楔角宽度为10.956 mm。在实际播种过程中适当增加机具的重量是解决滑移的方法之一。
3) 田间试验的数据表明,垂直入土式玉米穴播机作业后种子的空穴率为0.62%,播种深度达到25 mm的合格率为94.2%,膜下种穴错位率为0.8%,地膜破损程度率为48.9 mm/m2。各项指标均达到了NY/T 987—2006《铺膜穴播机作业质量》的评价技术规范要求。
4) 通过设计研究数据获知,垂直入土式玉米穴播机的研究还可以增加智能化装备,如检测根深和种子播量检测等。同时将调整数据反馈用于智能优化播种过程,以达到种子播量和根度的优化。
猜你喜欢
福建中学数学(2021年1期)2021-02-28
小资CHIC!ELEGANCE(2021年44期)2021-01-11
农家科技下旬刊(2017年8期)2017-11-13
农业与技术(2017年18期)2017-10-31
农业与技术(2017年9期)2017-05-28
课堂内外(小学版)(2017年3期)2017-04-15
故事林(2016年9期)2016-04-28
农家科技(2014年11期)2015-03-11