人工智能算法在农业机械发展中的应用研究*
2022-09-20 03:53刘靓葳
南方农机 2022年18期
刘靓葳
(长春金融高等专科学校,吉林 长春 130124)
随着计算机科学技术的迅速发展,人工智能算法已经被广泛应用,为实现高质量的农业机械奠定了基础。近年来,人工智能算法被广泛应用于农业机械中,如收割、检测、采摘等,极大地提高了生产效率,减少农业机械在使用过程中的失误,减少了环境污染,同时避免了资源的浪费。人工智能技术是计算机科学的一个分支,人工智能在计算机领域内得到重视,应用于机器人、控制系统、仿真系统中等,它是研究模拟人的一些思维和行为的学科,比如学习能力、思考、规划等。人工智能涉及计算机科学、心理学、哲学和语言学等学科,在农业机械发展中发挥了非常重要的作用。在农业机械发展中,专业内容会涉及机器视觉以及机器人等相关领域,所以导入人工智能算法具有十分重要的意义。
1 人工智能概述
人工智能(AI)指的是模仿人的智能的理论,人工智能的技术特点包括感知能力、记忆和思维能力、学习能力和自适应能力、行为决策能力。感知能力是指能够感知外部世界、获取外部信息的能力,这是产生智能活动的必要条件。记忆和思维能力能够存储感知到的外部信息及由思维产生的知识,同时能够利用已有的知识对信息进行分析、计算、比较、判断和决策。学习能力和自适应能力是通过和外界环境的相互作用,不断学习知识不断进行积累,最终自己能够适应环境的变化。行为决策能力是对外界环境的刺激作出相应的反应,形成决策并传达信息。
2 人工智能中常用的算法
人工智能的关键技术包括机器学习、知识图谱、自然语言处理、人机交互、计算机视觉、生物特征识别、AR/VR等。机器学习强调三个关键词:算法、经验、性能。常用的算法有很多,下面主要介绍人工智能算法中的神经网络、遗传算法、聚类算法和深度学习。
2.1 神经网络
20世纪40年代初,神经网络开始兴起并逐渐引起研究者的关注。神经网络模型是一种数学模型,它通过模拟人脑神经系统以及一系列的行为,将人脑的微观结构进行简化。神经网络的信息处理能力是具有非线性特点的,由此可见,神经网络适用于系统的建模及辨识。在汽车控制中,神经网络通常与其他控制方式相结合构成新的控制方案,近年来,一些研究者提出了神经网络PID控制、神经网络逆模型控制、神经网络预测控制、神经网络内模控制等复合控制算法。
神经网络是模拟人脑结构和行为的数学模型。近年来,在系统识别领域应用比较广泛的是BPNN(BP神经网络)和RBF(径向基)神经网络[1]。RBF神经网络作为一种局部逼近网络,它适用于在线学习;BPNN是一个全局网络,具有全局逼近系统的能力,结构简单,可以更好地进行复杂系统的离线识别,是学习系统动力学最常用的方法之一[2]。相比于单神经元网络,BPNN被大量应用在模式识别和自适应控制等领域的非线性建模中。BPNN通常应用在下列几个方面:模式识别、数据压缩、函数逼近、分类。BPNN一共有三层,分为输入层、隐藏层和输出层。图1为一个BPNN的结构图。
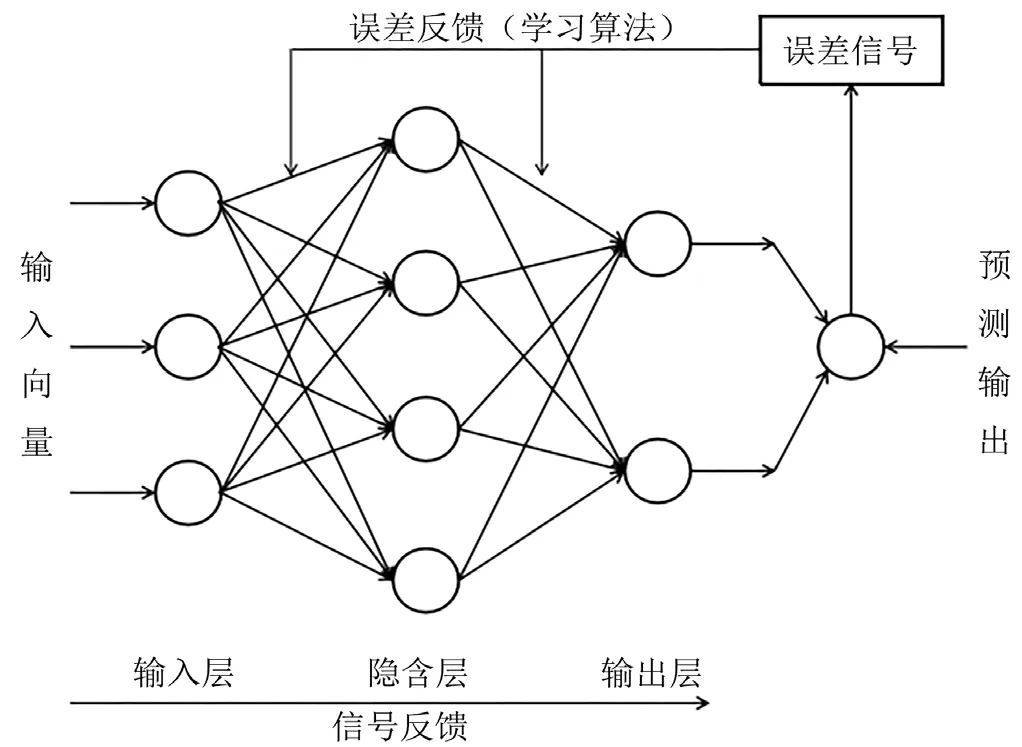
图1 BPNN结构图
在使用神经网络解决问题时,一般需要经过以下几个步骤:1)数据的收集;2)神经网络的建立;3)神经网络结构的配置;4)对神经网络的权值和阈值进行初始化;5)神经网络的训练;6)验证并测试神经网络;7)神经网络的使用。BPNN的训练过程如图2所示。
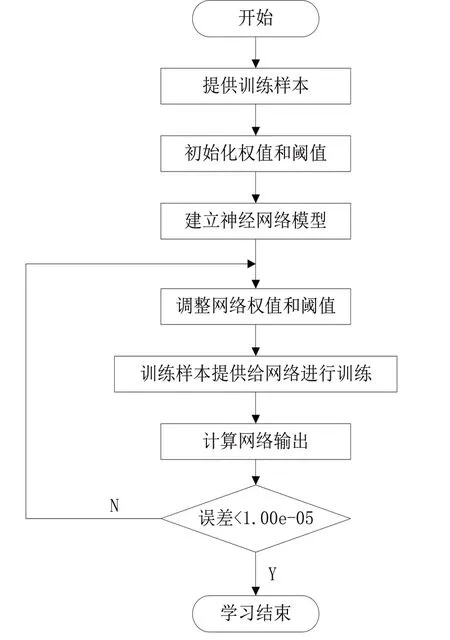
图2 BPNN的训练过程
2.2 遗传算法
1975年美国密歇根大学的John Henry Holland教授首次提出遗传算法,通过模仿大自然生物进化的过程来求解最优值问题的一种全局优化算法,即GA算法。GA算法可以处理一些复杂的优化问题,GA算法与传统的优化算法相比,它有下列几个特征[3]:1)GA算法在求最优解的问题时,不需要知道信息的全部特点,例如梯度信息等。2)GA算法在求最优值的过程中,初值是从一个群体开始,而不是从一个点开始,此外,函数能否连续可导等因素不会影响GA算法的求解过程。
标准GA算法(SGA)是只采用交叉、变异及选择这三个遗传算子的GA算法。通过许多研究实验证明,SGA算法不能全局收敛,可能会求出局部最优解。由于交叉算子和变异算子有时可能存在破坏性的作用,选择算子在选择时存在一些误差,这就使种群中的最优个体到下一代种群中会丢失掉,当进化代数无穷大的时候,在进化过程中总会出现最佳个体丢失现象。
由于最佳个体丢失引起GA算法收敛慢的缺点,De Jong在他的博士论文中提出了精英保留策略,就是将种群进化时适应值最高的个体保存,然后复制至下一代种群中。精英保留策略与GA算法相结合叫作精英保留遗传算法(Elitist Genetic Algorithm),简称EGA算法。运用EGA算法的优势是,在求解过程中,最佳个体不会被破坏,也不会丢失。精英保留策略在全局收敛方面的作用很大,EGA算法是全局收敛的已被学者Rudolph证明,其他学者也用各种方式证明EGA算法具有全局收敛的特性[4]。
2.3 聚类算法
聚类和回归类似,表述一类问题或一类算法。聚类算法一般按照中心点对输入的数据进行归类。聚类算法尝试找数据的内在结构,便于依照样本的共同点把数据归类。聚类算法是一种典型的无监督学习,用于把相似的样本自动归到一个类别里面。以相似性为基础,在一个聚类算法中,样本之间有较多的相似性,根据它们之间的相似性,把样本划分在不同类别中。聚类算法和分类算法也是有区别的,聚类算法属于无监督学习,但是分类算法是有监督学习。在无监督学习中,将数据集中的样本划分为多个不相交的子集,为数据进一步分析提供基础。
聚类算法分为原型聚类、密度聚类、层次聚类、模型聚类、谱聚类。常见的聚类算法有 K-means算法和高斯混合聚类(EM)。K-means算法是K均值算法,K-means中的K是样本数,初始状态下,中心点的个数,means是中心点到其他数据点距离的平均值。具体的步骤:首先,随机设置初始状态下空间内的点K个,定下来初始的聚类中心;其次,对于其他的点去计算每个点到K个中心的距离,然后重新计算每个聚类的新中心点,也就是求得平均值。若计算出的新的中心点与之前的中心点一样的话,那么质心可以不用移动,算法结束,否则需要继续计算每个点到K个中心的距离,循环之前的步骤,直到新的中心点和原中心点一样就结束。聚类算法的评判标准是簇间相似度高、簇内相似度低的时候效果最好。
3 人工智能算法在农业机械发展中的应用
在农业机械发展中,比如无人农业机械的实现,就要用到人工智能技术中的基于视觉的感知算法,包括目标检测算法、车道线检测算法、目标跟踪算法、行为预测、导航与定位[5-6]。在目标检测算法和车道线检测算法中,就需要用到神经网络进行检测,运用神经网络算法提高精度,神经网络除了应用于特征提取和滤波计算,还有其他用途,比如提取图像中的显著性区域。在农业机械故障诊断的过程中,机械故障存在模糊性及不确定性,就可以运用神经网络结合模糊技术对发动机的故障进行诊断,从而定下来故障的初步范围,再用训练好的神经网络进行下一步的确切诊断。
在农业机械行驶工况构建的实验中,可以运用改进的K均值聚类算法进行实现,首先,建立相关的数学模型,然后对数据进行预处理,把异常数据筛选掉;其次,对原始数据进行降维,运用的是主成分分析法;最后,结合改进的K均值聚类算法对参数进行聚类分析,选择合适的运动学部分,再进行行驶工况的构建[7]。也可以基于遗传优化K均值聚类算法进行工况识别,实现混合动力的机械能量管理,运用聚类算法对工况进行识别,结合ECMS(等效燃油最小能量管理策略)实现对于农业机械的能量管理[8]。
在无人农业机械中导航传感器如果发生异常,有相应的诊断方法,最佳方案就是运用深度学习算法。由于无人农业机械是一种智能工具,它完全依赖于传感器提供的路径信息以及精确的位置进行行驶,一旦GPS传感器受到攻击、受到威胁,就会导致导航位置信息出现异常,针对这类问题,可以用基于深度学习的异常检测方法[9]。在车道检测的过程中也可以使用深度学习算法。目前,自动驾驶逐渐发展起来,结合深度学习,使得自动驾驶越来越接近现实。深度学习作为人工智能实现的一种算法,已经被广泛地应用于农业机械领域,通过循环网络结构或者是多层的前馈[10],实现大量的参数的学习,实现复杂的映射逼近。深度学习和传统的神经网络是有区别的,传统的神经网络内部的层数是3层左右,而深度学习具有深层性和层与层之间连接的多样性。需要根据实际问题选择具体的算法,每种算法都有相应的作用,应用于不同的领域,具体问题具体分析。
4 结束语
综上所述,在农业机械发展中,应用人工智能技术可以提高生产效率,自动驾驶以及播种收割等环节都可以运用人工智能算法结合大数据、云计算等相关技术提升工作效率。同时,也能够让农业机械快速发展,确保人工智能技术在农业机械发展中的高效应用,形成农机智能一体化,促进农业的进一步发展。
猜你喜欢
湖北农机化(2021年15期)2021-12-07
河北农机(2021年8期)2021-08-24
今日农业(2020年16期)2020-12-14
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
电脑报(2019年4期)2019-09-10
农民致富之友(2019年17期)2019-07-01
现代计算机(2018年27期)2018-10-25
雷达学报(2017年6期)2017-03-26
互联网天地(2016年1期)2016-05-04