数据和知识双驱动下的土压平衡盾构结泥饼事件预警模型
2022-09-19 12:06胡珉,王伊,*,沈辉
隧道建设(中英文) 2022年8期
胡 珉, 王 伊, *, 沈 辉
(1. 上海大学悉尼工商学院, 上海 201800; 2.上海大学-上海城建集团建筑产业化研究中心, 上海 200072; 3. 上海隧道工程有限公司, 上海 200032)
0 引言
结泥饼事件是采用土压平衡盾构进行隧道施工时常见的施工问题。当刀盘切削后的渣土附着在刀盘表面或土舱内部并积聚和固结时,盾构施工将会受到严重的影响。结泥饼事件不仅会导致施工效率大幅下降、对施工质量和设备安全带来威胁,而且还会引起土舱压力的波动从而导致大幅度的地表沉降。一旦泥饼完全固结则难以逆转,往往需通过人工开舱的方式进行清理。这不但会影响正常的施工进度,还会造成额外的成本支出和人员操作风险。在泥饼尚未完全固结时,及时发现并预警,以便施工方通过冲洗刀盘、改良土体等方式进行先期处理,可以阻止泥饼固结事件的发生。然而,泥饼的形成机制较为复杂,识别过程中容易与其他施工现象混淆,在实际施工中很难实现结泥饼事件的早期发现。
对于结泥饼事件,工程案例分析是最为直接有效的分析手段。通过记录某一施工项目的结泥饼事件发生过程,描述结泥饼事件发生前后的具体表现并分析成因,可为后续结泥饼事件的发现与预防提供方向性指导。如: 王用斌[1]分阶段分析了佛山地铁结泥饼事件前的掘进参数变化情况,指出了土压力、推进速度、总推力、刀盘转矩等掘进参数在易结泥饼地质隧道施工中的变化特点; 傅鑫晖等[2]、温法庆等[3]从地层、盾构选型、施工因素等角度分析结泥饼事件的成因及表现,并指出发生结泥饼事件时会出现“速度降低、土压力不稳定、推力及转矩逐渐增大、渣温升高”等现象; 邓如勇[4]综合多个刀盘结泥饼事件案例的表现,总结了刀盘外部结泥饼时可能出现的7种现象。这些案例描述和总结了结泥饼事件的相关现象,但并没有形成通用性、清晰化的规则或模型,难以直接用于其他工程结泥饼事件的自动化判断。
为探究结泥饼事件的机制成因,基于理论模型及模拟试验的方法也被用于土压平衡盾构结泥饼事件的风险识别。如: Alberto-Hernandez等[5]指出,影响泥饼固结的因素包括土质参数、钢材表面参数和环境参数等; Barzegari等[6]研究了土壤中含水量变化对泥饼固结的影响,发现当含水量为20%~52%时,泥饼固结的概率最大; Thewes等[7]基于室内模型试验研究了黏土附着盾构设备表面的力学机制,建立了基于土壤稠度和塑性指标的结泥饼风险预测图,可用于前期的设备选型和施工计划制定; Bang等[8]通过室内模型试验比较了不同开口率、刀盘旋转方向和刀盘转速下的泥饼固结情况,发现刀盘双向旋转、刀盘转速低都可能提升刀盘结泥饼的概率。为快速准确评估盾构的泥饼固结隐患,Oliveira等[9]设计了一种专门用于测量土壤中黏土含量的装置,以推断盾构的泥饼固结趋势; 袁大军等[10]通过盾构模型刀盘结泥饼试验,提出了转矩指数和转矩指数变化率2个指标用于检测结泥饼事件。这些研究为结泥饼事件的特征分析提供了理论基础,但还不能直接用于结泥饼事件预警。
近年来,学者们开始尝试利用实时施工数据探索。结泥饼事件的预警机制。如: 夏毅敏等[11]、Fu等[12]根据刀盘中心温度的最大值及冷却速率判断刀盘表面是否存在泥饼; 文献[13]提出了基于刀盘转动惯量变化趋势判断刀盘结泥饼的方法。考虑到结泥饼事件与多个施工数据有关,文献[14]选取了刀盘推力、刀盘转矩、推进速度、渣土温度4个施工参数,采用BP神经网络建立结泥饼事件检测模型; Zhai等[15]使用随机森林方法建立了自动更新的盾构结泥饼事件预警模型,基于施工参数的环统计特征更新预警策略。然而,不同工程项目中结泥饼事件的施工参数表现不尽相同,难以构造完备的结泥饼事件训练集;其次,结泥饼事件存在一个逐渐形成和固结的过程,采用BP神经网络等非时序的机器学习方法,难以学习时序数据变化特征,这也影响了对结泥饼事件的识别成功率。
综上所述,工程案例为结泥饼事件提供了经验支持,基于试验数据和施工数据的方法提供了结泥饼事件诊断的另外一个视角,但是目前这2种方法都还没有达到实际应用的阶段,未能被实际工程应用。为了帮助施工人员早期发现结泥饼事件,及时采取措施,减少不必要的开舱操作,本文将工程经验与施工数据相结合,提出一种数据和知识双驱动下的土压平衡盾构结泥饼事件预警模型,一方面从数据驱动的角度分析实时时序数据并从中发现掘进异常;另一方面从大量历史施工经验中提炼知识,进行结泥饼特征早期识别,提升结泥饼事件预警的准确性,从而减少结泥饼事件的发生。
1 结泥饼事件预警模型
为实现对土压平衡盾构结泥饼事件的有效预警,从数据建模和知识推理2个角度出发设计结泥饼事件预警模型,其中结泥饼事件知识主要来源于文献及实际施工工程案例。
1.1 关联施工参数
基于文献案例,从实时掘进参数、基础施工参数和盾构基本情况3方面整理了与结泥饼事件相关的影响因素(见表1),为结泥饼事件判断规则和基于实时施工数据的结泥饼事件异常发现算法的构建奠定基础。
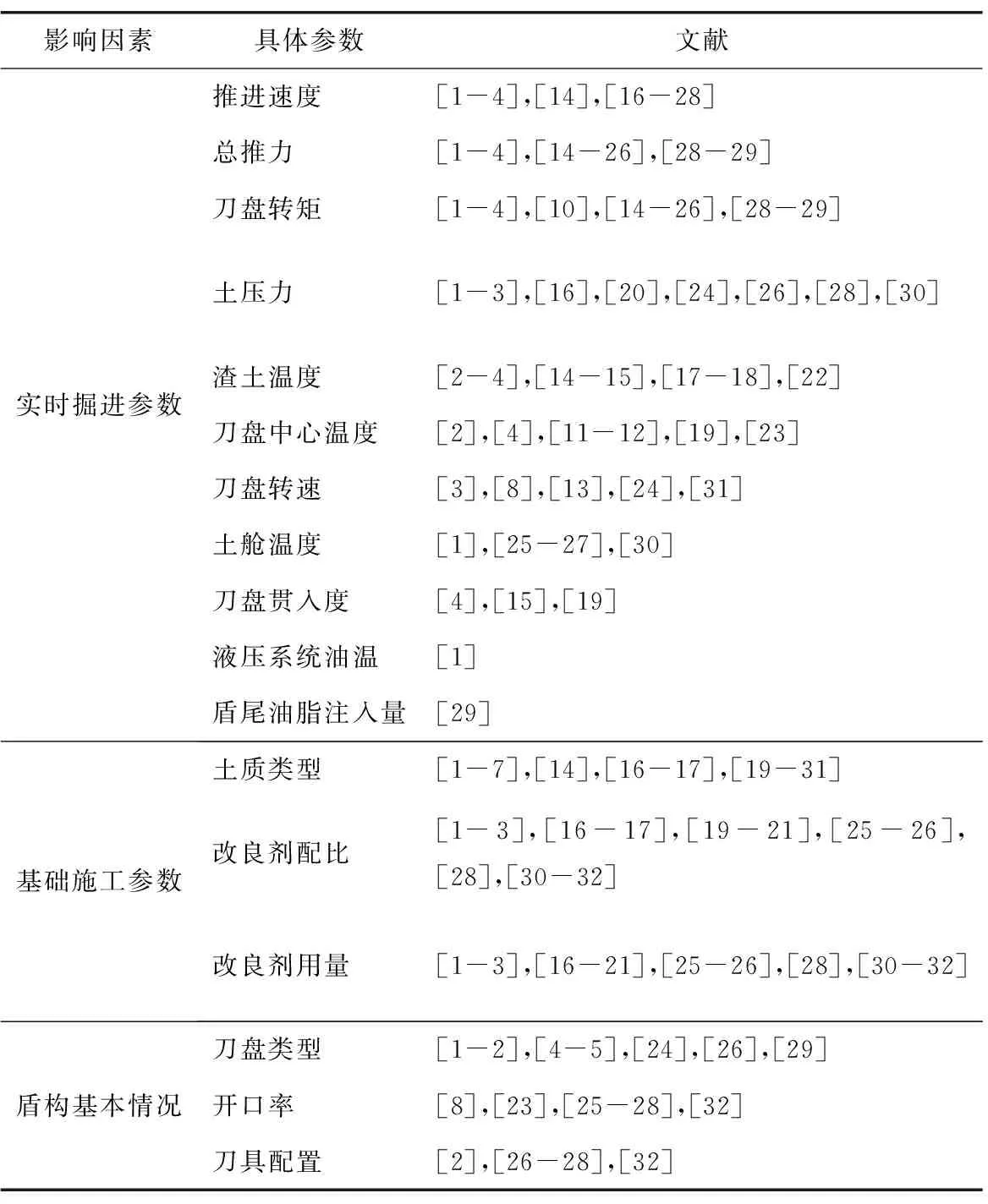
表1 结泥饼事件关联工程参数Table 1 Engineering parameters related to mud-cake event
结合文献及工程对工程参数的提及频率和盾构的传感器常规配置情况,选取了实际盾构项目普遍可获取的以下11个参数作为与结泥饼事件关联的关键工程参数: 推进速度、总推力、刀盘转矩、土压力、土质类型、改良剂配比、改良剂用量、掘进模式、刀盘类型、开口率和刀具配置。渣土温度、刀盘温度等参数因多数土压平衡盾构中未安装相关传感设备而未选用。
1.2 预警模型框架
基于结泥饼事件文献及工程案例数据的分析,提出数据和知识双驱动下的土压平衡盾构结泥饼事件预警模型(MCEW_DK),模型框架如图1所示。该模型由2个子模型组成: 数据驱动的结泥饼异常诊断子模型和知识驱动结泥饼事件诊断子模型。考虑到盾构结泥饼事件中施工参数具有随时间逐渐变化的特点,借鉴稳健时序异常检测算法(robust anomaly detection for time-series data,RADTD)[33]能学习多维时间序列的时序变化特征的优势,基于结泥饼事件相关的施工参数的多维时间序列数据,建立数据驱动的结泥饼异常诊断子模型(data-driven sub-model for mud-cake event anomaly detection,DMCAD),检测多维时序数据的异动情况,从而得到结泥饼事件发生的概率;从工程案例出发,基于工程经验规则,建立知识驱动结泥饼事件诊断子模型(knowledge-driven sub-model for mud-cake event diagnosis,KMCED),根据工程状态特征与结泥饼规则的匹配程度,判断结泥饼事件发生的概率。由式(1)综合2个子模型的判断,计算结泥饼事件的最终预警结果。
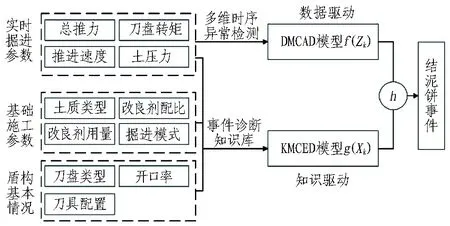
图1 数据和知识双驱动下的土压平衡盾构结泥饼事件预警模型Fig. 1 Mud-cake event early warning model for earth pressure balance shield driven by both data and knowledge
pk=h[f(Zk),g(Xk)]。
(1)
式中:pk为第k环的结泥饼事件预警概率;f(Zk)为DMCAD子模型输出的结泥饼事件概率;g(Xk)为KMCED子模型输出的结泥饼事件发生概率;h(·)为综合判断函数。
考虑到DMCAD与KMCED子模型方法单独检测时误报率较高,为提高预警可信度,本文中选用因子相乘计算。
2 数据驱动的结泥饼异常诊断子模型
结泥饼事件发生前后,盾构多个施工数据都会发生一些有别于正常情况的波动,本文从多维时间序列数据异常诊断的角度对结泥饼事件进行分析。
2.1 时序异常检测方法概述
目前,工程上对结泥饼事件的数据采集还不完整,缺少此类事件的标准数据集和足够的数据标签,难以直接学习结泥饼事件的参数时序特征,因此,本文选择了无监督多维时序异常检测算法RADTD,进行结泥饼事件的异常检测。
RADTD算法[33]是一种基于数图转换和快速自学习的时间序列异常检测方法,利用负选择思想、无阈值递归图(unthresholded recurrence plot,URP)和极限学习机自编码器(extreme learning machine autoencoder,ELM-AE),能够将时间序列数据转换为图矩阵的形式,并通过快速学习和重构检测到时间序列中的异常,具有对负样本依赖度低、鲁棒性高等特点。
2.2 异常诊断子模型构建

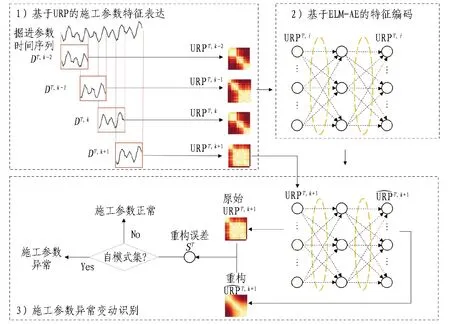
图2 数据驱动的结泥饼异常诊断子模型Fig. 2 Data-driven sub-model for mud-cake event anomaly detection
3 知识驱动的结泥饼事件诊断子模型
知识驱动的结泥饼事件诊断子模型(KMCED)以文献和实际施工工程案例中的经验知识为基础,提取后形成规则库,用于模糊推理机的实时结泥饼事件诊断。
3.1 结泥饼事件知识库构建
围绕第2节中选取的实时掘进参数、基础施工参数和盾构基本情况的相关参数及结泥饼事件发生的条件因素,进行了详细的调研,构建了土压平衡盾构结泥饼事件的知识规则库。规则库中的知识采用模糊If-Then产生式规则进行表达,既可以与实际经验表达习惯基本一致,又体现经验知识的模糊性、不确定性以及规则的强度。规则表示法如式(2)所示。

ThenyisBl。
(2)
各规则的模糊条件中,隶属度函数的确定主要参考隶属度函数的建立原则[34-35]、结合工程实时参数的分布及变化特征进行设计。由于施工参数数据多为正态分布,同时实际数据可能存在波动性,选用梯形作为隶属度函数,其比常见的三角隶属度函数更容易拟合实际情况。梯形隶属度函数的最大隶属度区间根据工程案例中的数据区间确定,同时考虑数据的波动性和部分案例的描述冲突,将中心值两侧10%左右划定为重叠区域。
此外,结泥饼事件规则的可信度分为高、中、低3种程度,各规则的可信度从文献及工程案例基于项集的支持度计算获得[36],第l条规则的支持度计算公式如式(3)所示。
(3)
式中: Numl为包含规则l的文献及工程案例数; Num为文献及工程案例总数。
最终得到37条结泥饼事件的诊断规则。结泥饼事件规则示例见表2。

表2 结泥饼事件规则示例Table 2 Examples of mud-cake event rules
3.2 结泥饼事件规则推理机
利用知识规则库中的模糊规则,模糊推理机基于工程数据,采用Mamdani模糊推理法进行推理。具体步骤如下:
1)取每环的盾构基本情况、基础施工参数及实时掘进参数数据为原始输入量X,对其模糊化处理,求出输入量X关于对应语言变量F中各定性值的隶属度。
2)计算规则前提部分模糊命题的逻辑组合。对于给定的输入X,可以求出对第l条规则的适用度如式(4)所示。
(4)
3)通过模糊推理可得每条模糊规则的输出量模糊集合Bl的隶属度函数如式(5)所示。
μBl(y)=alμBl(y)。
(5)
式中μBl(y)为第l条规则中输出量y的模糊隶属度函数。
4)输出量的总隶属度的模糊合集如式(6)所示。
μB(y)=max(μB1(y),…,μBl(y),…,μBN(y))。
(6)
5)采用加权平均的清晰化方法,可求得对应掘进环号与结泥饼事件的隶属度如式(7)所示。
(7)
式中P(y)为结泥饼事件发生概率。
4 工程应用
4.1 工程概况
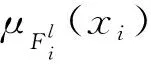
南京市某地铁隧道施工区间的隧道总长为734.514 m,结构断面形式为圆形,施工采用1台外直径为6 200 mm的土压平衡盾构。隧道中心埋深为15.3~22.7 m。由于地质条件复杂,盾构采用滚刀加刮刀组合,刀盘为中心支撑的、带胸板辐条型刀盘,刀盘开口率为42.7%。在本区间100—300环,盾构所穿越地层分别为粉质黏土与粉土互层、淤泥质粉质黏土、强风化泥质砂岩和中风化泥质砂岩。工程地质剖面如图3所示。
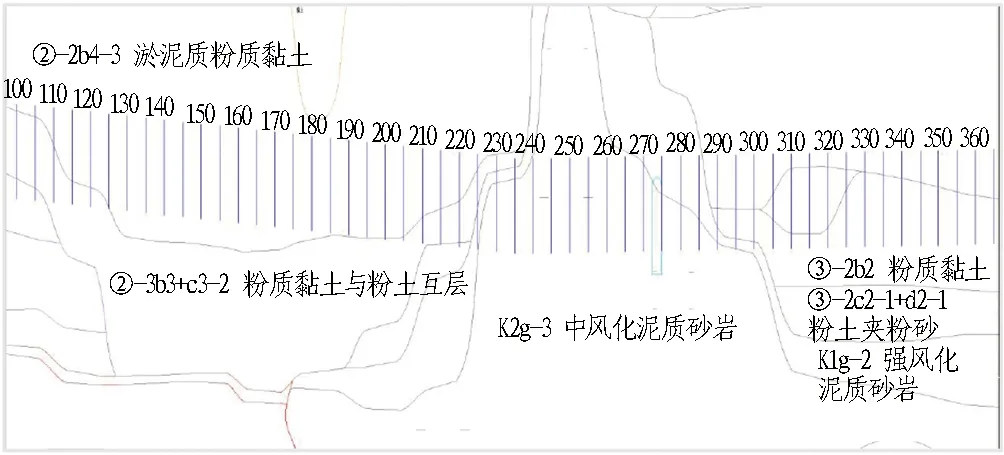
图3 工程地质剖面图Fig. 3 Engineering geological profile
数据和知识双驱动下的土压平衡盾构结泥饼事件预警模型(MCEW_DK)自100环后在该隧道区间上运行,用于实时跟踪盾构推进状态、预警盾构结泥饼事件。从工程中获取的盾构推进数据包括实时施工参数、实时施工状态和盾构基本情况。
DMCAD子模型基于实时施工参数数据由总推力、刀盘转矩、推进速度和顶部土压力组成,并取每100 mm净行程为一个采样点。为保留连续推进段的工程数据,模型剔除了推进速度为0的施工数据,并删除了传感器采集异常等导致的离群点。在模型诊断时输入多维时间序列的长度L=30,时间窗口长度设为20,步长为1,每次输入自编码器学习的URP图个数为10,输出为多维施工数据时间子序列的结泥饼事件概率。KMCED子模型除了采集实时掘进参数数据(总推力、刀盘转矩、推进速度和土压力)外,还采集刀盘开口率、刀具类型等盾构基本情况和土质类型、改良剂配比、改良剂用量等基础施工参数(见表3),推理机根据实时数据按环分析结泥饼事件的概率。2个子模型的结果结合后,输出最终MCEW_DK模型的预警概率。参照其他历史工程模拟中的预警效果,结泥饼事件报警阈值人工设定为0.6。
表3 工程参数的输入样式Table 3 A set of engineering parameter examples
4.2 模型预警情况
MCEW_DK模型在施工区间中监测结泥饼事件的预警概率以环为单位统计和检验,当环预警概率大于设定阈值0.6时,记为1次结泥饼事件预警。MCEW_DK模型输出的结泥饼预警结果显示,模型最早于236环出现了结泥饼事件预警,此后报警环为246、247、249、250环。然而,在252环的盾构例行检查中,施工人员开舱检查,并没有发现明显的结泥饼现象。施工方在分析时并不完全确信模型的预警结果与结泥饼现象有关。盾构恢复推进后,模型在259、260、261、262、264、265、266、267、268环发出预警,并在267环预警概率达到最大。结合现场施工反馈,265环后施工效率明显降低,故268环盾构停机开舱检查,发现土舱内存在严重的泥饼固结现象(见图4),此后开舱清理工作持续了2 d。恢复推进后,模型除270环有一次误报外,此后盾构推进状态正常。这一工程事件说明,在掘进状态下,MCEW_DK模型对结泥饼事件的检测效果较好,能够早于开舱时间发现结泥饼事件并进行预警。值得一提的是,除阈值判断外,基于结泥饼事件预警结果的施工开舱决策还需要结合模型预警连续性及其他施工条件进行分析。

(a) (b)图4 盾构土舱内部结泥饼情况Fig. 4 Mud cake in excavation chamber
4.3 模型预警结果对比分析
泥饼在高温和高压的共同作用下形成,但在实际工程中难以精确把握泥饼的形成进度,导致很难判断泥饼的实际形成时间。经过专家事后研判,推断实际结泥饼的区间为258—268环。为进一步分析MCEW_DK模型的效果,将模型结果与DMCAD子模型及KMCED子模型的检测结果进行了对比。3个模型的预警结果如图5—7所示。图中用浅红色标注专家研判的实际结泥饼区间,并用红色三角标注开舱处理结泥饼的位置(268环)。
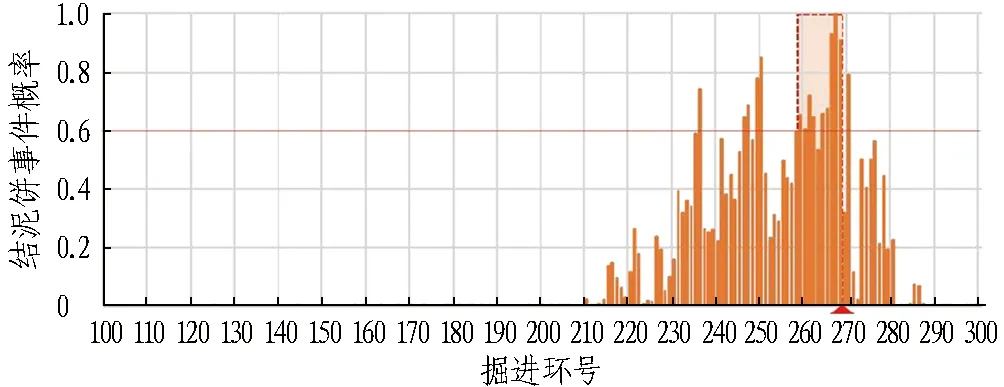
图5 100—300环段MCEW_DK模型预警结果Fig. 5 MCEW_DK′s results in ring 100~300
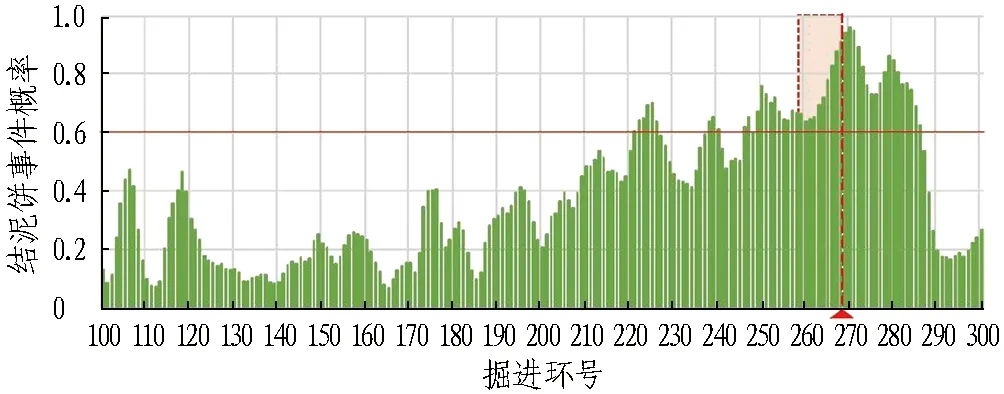
图6 100—300环段DMCAD子模型预警结果Fig. 6 DMCAD′s results in ring 100~300
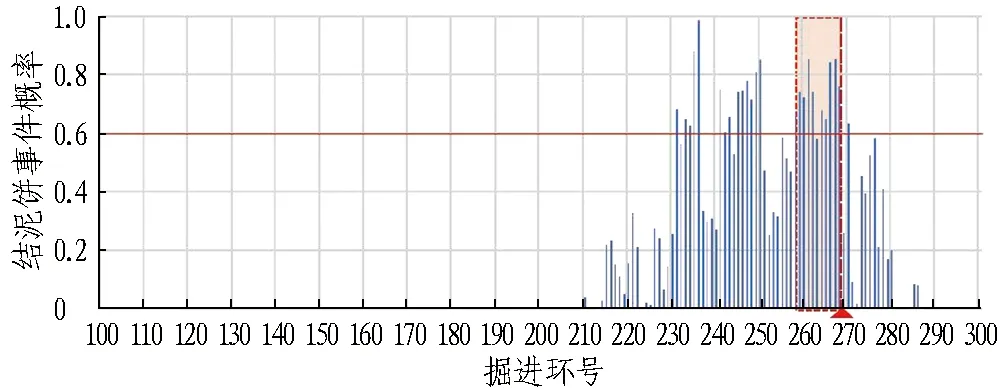
图7 100—300环段KMCED子模型预警结果Fig. 7 KMCED′s results in ring 100~300
4.3.1 MCEW_DK模型预警结果分析
由图5可知: 1)共存在15环报警,其中9环位于实际结泥饼区间内,占全部结泥饼环的81.81%; 2)相对其他2个子模型,MCEW_DK模型的报警次数最少,有效降低了数据驱动及知识驱动下模型预警的误报率; 3)临近开舱位置时,随着盾构的推进,模型预警的结泥饼事件概率呈逐环上升态势,且267环的预警概率达到了峰值,早于实际盾构开舱时间,表明了MCEW_DK模型对结泥饼事件的敏感性; 4)随着泥饼固结情况的恶化,判断为结泥饼事件的概率不断增加,而在泥饼开舱处理后,模型能够迅速识别到盾构推进状态的改变,结泥饼事件发生概率骤降。
4.3.2 DMCAD模型预警结果分析
由图6可知: 1)200环后检测到的异常概率开始呈波动上升的趋势,在 221环的结泥饼事件概率就超过了设定阈值,最终报告结泥饼事件预警共52环,所有专家标记的结泥饼区间都能够被准确识别; 2)DMCAD子模型对盾构施工状态较为敏感,能够发现盾构实时施工参数数据的异常变化、较早报告异常施工现象,有助于早期识别结泥饼事件; 3)DMCAD子模型的预警范围持续时间较长,即使在268环开舱处理以后的连续20余环里,仍然判断盾构施工状态异常,此期间的数据异动无法用结泥饼事件解释,可能与盾构的其他施工情况有关。因此,仅通过DMCAD子模型将难以有效鉴别结泥饼事件,可能会出现较多的误报。
4.3.3 KMCED模型预警结果分析
由图7可知: 1)结泥饼事件概率超过报警阈值的共有25环,有10环在标记的实际结泥饼事件区间内,占全部结泥饼环的40%,可见结合施工经验生成的知识规则库,KMCED子模型可以识别到符合盾构结泥饼事件相关经验特征的掘进环号; 2)最早一次预警出现在231环,早于实际结泥饼事件区间,且在处置泥饼后,预警概率骤降,可见子模型对泥饼辨识的灵敏性; 3)KMCED子模型也会出现误报,结泥饼事件最大预警概率出现在236环,而此后252环的开舱显示实际并不存在结泥饼事件,这可能由于工程经验的不完备性所致。
4.3.4 模型预警结果比较
为比较MCEM_DK模型与DMCAD和KMCED 2个子模型的预警效果,计算了各模型的准确率和误报率。准确率表示模型预警环在结泥饼标记环中占的比例,反映了模型对实际结泥饼区间的覆盖情况;误报率表示模型预警环在非结泥饼环中占的比例,反映了模型将正常环误识别为结泥饼环的误报情况。为保证预警机制的可行性,使用F1分数综合准确率和误报率这2个指标,评判预警效果。
各模型预警结果显示,在0.6的设定阈值下,DMCAD子模型能够预警所有结泥饼标记环,但受误报率影响,F1分数仅为0.35;KMCED子模型的预警效果稍优于DMCAD子模型,F1分数为0.56;MCEM_DK模型在准确率接近的情况下误报率仅40.00%,F1分数为0.69,可以看出预警效果明显优于其他2个子模型。
由此可见,MCEM_DK模型通过集成2个子模型,大大减少了2个子模型单独检测时出现的误报,预警的结泥饼环同时满足经验知识和数据建模视角下的判别标准,更有利于检测到结泥饼事件出现的节点。
4.3.5 阈值设定探究
在实际应用中,报警阈值的设定会影响模型预警的准确率和误报率。本文讨论了报警阈值设定对模型预警结果的影响。在南京地铁工程项目中,各模型在不同阈值下的预警结果如表4和表5所示。
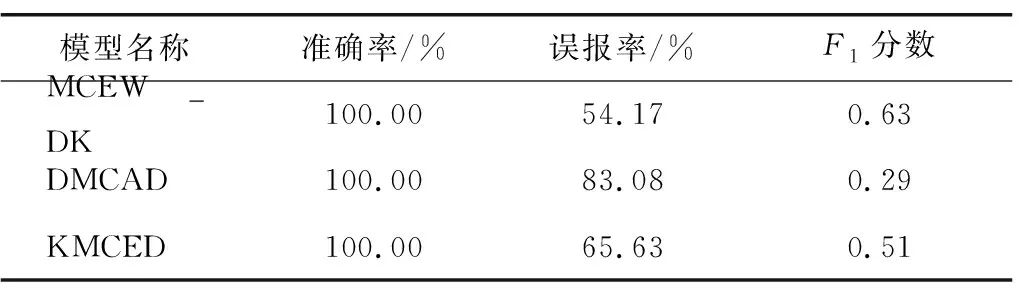
表4 报警阈值为0.5时的预警结果Table 4 Warning results under alarm threshold of 0.5
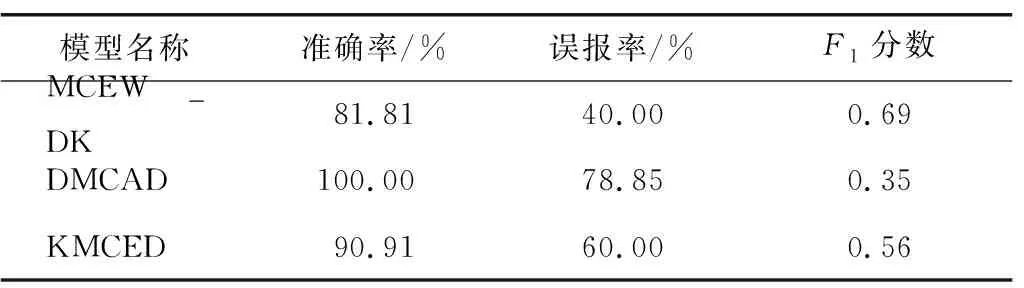
表5 报警阈值为0.6时的预警结果Table 5 Warning results under alarm threshold of 0.6
施工过程中的报警阈值参考其他历史工程模拟中的误报率和准确率设定。出于安全考虑,将阈值设定为0.5以上能够成功预警更多结泥饼环,但同时也会导致误报环较多、检修成本大幅增加。若从安全和经济等多角度考虑,为减少开舱次数,可将报警阈值设定为0.6或者更高。实际应用时,应结合工程实际选择模型的报警阈值。
5 结论与展望
本文从数据建模和知识推理2个角度提炼土压平衡盾构结泥饼事件的典型特征,提出了数据和知识双驱动下的土压平衡盾构结泥饼事件预警模型。该模型应用于南京某地铁隧道施工项目,并将预警结果与单一形式子模型进行对比,得出如下结论:
1)数据和知识双驱动下的预警模型通过结合数据挖掘技术和历史工程经验知识,能够对土压平衡盾构的结泥饼事件进行有效预测,其在0.6的报警阈值下环预警F1分数为0.69,具有预警准确率高、误报率低的优点,预警效果优于单一形式的子模型。
2)在南京市某地铁隧道工程应用中,数据和知识双驱动下的预警模型从264环到268环连续报警,报警开始时间明显早于人工发现的时间,这有助于在实际施工过程中及时采取措施。
3)预警模型的报警阈值设定会同时影响预警结果的准确率和误报率,其与施工安全和经济成本紧密相关,该阈值设定须结合工程实际需要进行调整。
4)数据和知识双驱动下的预警模型充分利用已知工程数据,将数据建模和知识推理方法结合,降低了数据建模和知识推理单独应用时的误报率,达到准确、及时预警的目的,具有较高的工程应用价值。
5)预警模型的预警结果受不完备的经验知识和施工数据噪声大的限制,在实际应用中需要结合环预警的连续性进一步研判,但高频次的预警能力有助于建立更为灵敏的结泥饼事件预警机制。
本文根据现有文献及历史工程建立预警模型,当前结泥饼事件相关工程经验还不完备,如喷嘴布设等工程参数对泥饼的影响还有待后续补充完善。随着工程案例的补充,结泥饼事件知识库还将不断更新完善,这也有助于细化结泥饼事件的类型和应用场景,进一步提高模型预警的准确率。另外,本文提出的数据与知识双驱动下的预警模型还可应用于其他难辨识的盾构异常事件预警中,推进构建用于诊断多种异常事件的施工预警体系。
猜你喜欢
矿山机械(2022年10期)2022-10-20
中国重型装备(2022年1期)2022-02-11
建材发展导向(2021年22期)2022-01-18
商品与质量(2021年42期)2021-12-03
科学技术与工程(2021年27期)2021-10-15
建材发展导向(2021年11期)2021-07-28
铁道建筑技术(2021年4期)2021-07-21
洛阳理工学院学报(自然科学版)(2021年2期)2021-07-14
东方少年·快乐文学(2020年8期)2020-10-20
模具制造(2019年7期)2019-09-25