
可用于浮台的太阳能光伏自动追踪装置研制
2022-09-19 01:26焦亚杰李东波
机械设计与制造工程 2022年8期
焦亚杰,张 敏,李东波
(1.南京理工大学机械工程学院,江苏 南京 210094)(2.南京波思途智能科技股份有限公司,江苏 南京 211100)
1 太阳能的利用
太阳能,是指太阳的热辐射能,就是常说的太阳光线[1]。从我国现阶段的太阳能发电成本来看,其花费在太阳电池组件的费用为60%~70%,太阳能电池板发电量取决于接收到的太阳能辐射量,提高太阳能的利用效率可以显著降低成本。光伏自动追踪方式可以充分有效地利用太阳能[2]。追踪控制方式分为两类:光电控制和时空控制。光电控制是由光敏元件检测太阳的运动规律进行追踪,时空控制根据地理位置以及实时时间算出太阳的运动规律从而进行追踪。时空控制又可以分为单轴追踪和双轴追踪:单轴追踪只对太阳方位角或高度角进行追踪,双轴追踪对两者都进行追踪。两种追踪方式都可以显著提高太阳能利用效率。如图1所示,在美国亚利桑那州测得单轴追踪比固定式安装所接受的太阳能辐射量高40%左右[3]。
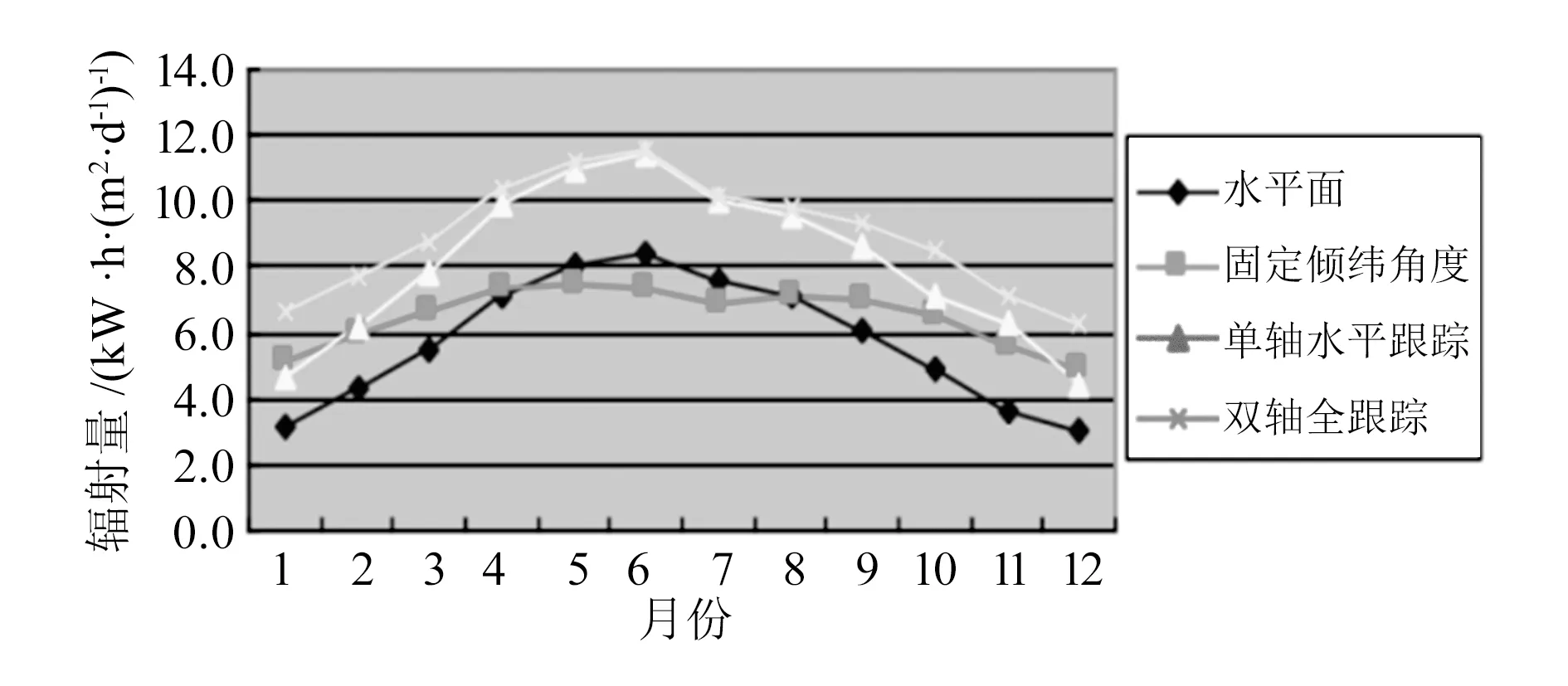
图1 太阳能辐射量对比
本文设计了一款基于立柱式的单轴太阳能角度追踪控制装置,太阳的位置信息可以用方位角和高度角来表示。由于浮台在水面上容易发生水平偏转,因此太阳方位角难以追踪,本文拟用4片太阳能电池板来减小太阳方位角对吸收太阳辐射量的影响,并且设计铰链结构,利用电机推杆推动实现对太阳能电池板倾斜角的调节来对太阳高度角进行追踪[4-6]。该装置以STM32F103RCT6为主控芯片。
普通时空追踪方式具体为当太阳高度角与电池板倾斜角的余角满足一定条件时,便控制追踪装置调整到与当前太阳光线垂直的位置。此种方法存在弊端,太阳高度角在日出日落的时候变化速率快,到达正午时变化的速率减至最小,而追踪装置的运行需要一定的时间,因此当太阳能电池板运动到指定位置时,太阳已经运动到了下一个位置,理论上太阳位置将会一直超前于光伏位置。基于此,本文设计了一种新型的追踪控制方法来消除这种现象。
2 追踪装置初始设计
2.1 高度角的计算
太阳能电池板的方位角是电池板垂直面与正南方向的夹角(向东偏设定为负角度,向西偏设定为正角度)。由于浮台本体在水面会由于水流的流动以及外界天气如狂风等发生旋转,因此追踪方位角难度极大并且准确性较低,针对这个情况,拟选用4片太阳能电池板,水平面对称轴依次相差90°,以达到最大程度被太阳光线覆盖的目的。倾斜角是太阳能电池板平面与水平地面的夹角,本文采用单轴铰链机构调节该角度。
太阳高度角与太阳能电池板倾斜角的和为90°。太阳高度角H与太阳赤纬角δ、太阳时角t、太阳板安装所在地的地理纬度φ有关系,计算公式为:
sinH=sinφsinδ+cosφcosδcost
(1)
太阳赤纬角可由式(2)计算得出:
(2)
式中:n为积日,即从元月一日算起到当前日子的天数总和,如二月的最后一天在平年时n=59,闰年时n=60。
太阳时角规定每个小时为15°,并且在正午时时角为0°,上午时为负,下午时为正,如11:00时的太阳时角为-15°,13:00时的时角为15°,太阳时角的计算公式为
t=(T-12)×15°
(3)
式中:T为换算成小时的时间。T的换算公式为
(4)
式中:h为当前小时数;m为当前分钟数;s为当前秒数。由式(1)~(4)可以求出太阳高度角,进一步可以得到太阳能电池板的倾斜角,从而由追踪装置控制太阳能电池板倾斜角改变与太阳高度角互余。
由于光照时间在不同的季节时长不同,因此需要计算日出日落时间来确定太阳能电池板追踪装置是否需要工作,可由日出日落的时角来转换出日出日落时间得到工作时区,由当地纬度与太阳赤纬角求得日出时角ω出:
ω出=arccos(-tanφtanδ)
(5)
则日出时间T出计算公式为

(6)
日落时间T落计算公式为
T落=24-T出
(7)
2.2 追踪方式的改进及仿真
为了便于理解,设追踪装置的角度为太阳能电池板倾斜角的余角。当检测到太阳高度角与追踪装置的角度差达到所设定的阈值Δθ时,控制追踪装置转动2Δθ,这样就可以保证运动后光伏位置超前于太阳位置,待下次太阳位置超前于追踪装置Δθ时,继续此次操作,使得追踪装置停止的每个时区内都经历了位置由超前到滞后的过程。具体过程如图2所示。

图2 改进后的追踪方式
图中,θg1为追踪装置前一时刻所在的角度,θt1为太阳高度角,此时两者差值达到所设定的阈值Δθ时,追踪装置开始运动2Δθ,位置角度到达θg2,因为追踪装置运动需要时间,且电机推杆的特性为负载越大速度越慢,因此追踪装置运动后的太阳位置为θt,此次追踪运动完成。待太阳运动到θt2时重复此次运动。
对南京地区(北纬32°),冬至日(积日355)采用改进之后的追踪方法进行效果仿真,设阈值为1.5°,忽略追踪装置运动所花费的时间,分别得到太阳高度角与追踪装置的角度随时间变化的曲线,如图3所示。由图可知,追踪装置每次停顿的区间都经历了位置相对于太阳高度角由超前至滞后的过程。
3 机械结构设计
考虑到结构简单与降低成本的因素,本文采用电动推杆的方式调整太阳能电池板的倾斜角,整体装置如图4所示。

1—顶板;2—太阳能电池板;3—底板;4—支撑架;5—电机推杆;6—推动杆;7—推杆连接盘;8—合页
装置由4片太阳能电池板构成整个发电系统,每个太阳能电池板与顶板之间由两个合页结构连接,便于太阳能电池板在垂直面的翻转,动力机构选择可以自由定制行程与推力的电机推杆,为整个追踪机构提供动力。电机推杆与连接盘固定,连接盘上为4个铰链机构。推动杆与连接盘间、推动杆与太阳能电池板间均为铰链机构。以推动4片太阳能电池板做俯仰运动来追踪太阳高度角。顶板与支撑架均由轻质铝合金构成以固定整个装置。
3.1 合页结构
合页通常是指保持门窗打开或关闭时做转动的装置,属于带转轴的体系。在此处选择的合页为抽芯合页。每片太阳能电池板与顶板左右各有一个合页装置可轻易使太阳能电池板发生偏转,结构如图5所示。

图5 合页结构
3.2 俯仰旋转机构
俯仰旋转机构是光伏自动追踪装置的核心部分,顶板由合页结构连接4片太阳能电路板,且顶板与底板间由4个支撑架固定,由电机推杆驱动太阳能电池板进行俯仰运动,由于电机推杆有自锁功能,因此装置受风力影响较小。由太阳能电池板的倾斜角可以推算出电机推杆的高度,具体推算过程可由纵剖面图得出,纵剖面图如图6所示。

图6 驱动装置剖面图
图中,l1为顶板长度的一半,l2为太阳能电池板长度的一半,l3为推动杆的长度,l4为推动杆到电机推杆的水平距离,已知l2与水平轴线的夹角α即为太阳能电池板的倾斜角,可以推算出连接盘与顶板的距离h,因为顶板到地板的距离不变,所以可以求出电机推杆的总长度,从而可以求出推杆所需伸缩的距离。添加辅助线可以得到图7。
已知α可由太阳高度角计算公式求出,如果求出l3与水平轴线的夹角β即可得到h,β的求解公式为
(8)
知道两个夹角即可以求出h:
h=l2sinα+l3sinβ
(9)
3.3 电机推杆的选择
电动推杆是一种新型的电动执行机构,其主要由电机、推杆、控制装置等机构组成,一般自带行程开关,可以实现远距离控制、集中控制,具有体积小、精度高、完全同步、自锁性能好等优点。电机推杆超过最大推力时,推杆会自动停止工作进行自我保护,能达到的最大推力为6 000 N,最大行程为1 500 mm。为了使太阳能电池板可以在10°~80°之间翻转,应通过求出当α分别为10°与80°时推杆的长度之差来选择较为合适的电动推杆行程。
4 硬件电路设计
硬件平台的设计主要包括GPS模块、实时时钟模块、电机推杆驱动模块等。遵循成本低、控制方便、性能可靠等原则,太阳能电池板自动追踪系统的硬件框图如图8所示。
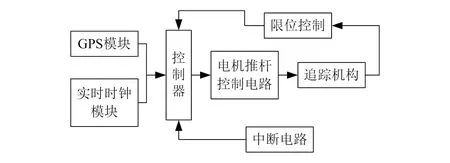
图8 硬件电路框图
各部分的主要功能如下。
GPS模块:得到所在位置的地理信息,为太阳高度角的计算提供当地的纬度参数。
实时时钟模块:提供实时时间,为太阳赤纬角以及太阳时角的计算提供参数。
中断电路:便于电机推杆的控制,方便调试。
电机推杆控制电路:控制电机推杆到达准确位置。
4.1 GPS模块
选用的GPS接收机GR-87是一个高效能、低耗电的智慧型卫星接收模组,它采用美国瑟孚公司设计的第三代卫星定位接收晶片,晶片内建200 000个卫星追踪运算器,大幅提高搜寻及运算卫星讯号能力。GR-87采用+5 V供电,具有一个TTL串行接口,可以通过串行接口与主控制器芯片直接相连,十分方便,电路如图9所示。

图9 GPS模块
4.2 实时时钟模块
太阳时角的计算需要得到精准的实时时间,因此需要一个实时时钟模块为主控制器芯片提供准确的实时时间。DS1302是 DALLAS(达拉斯)公司推出的涓流充电时钟芯片,内含有1个实时时钟和31字节静态RAM,通过简单的串行接口与单片机进行通信,实时时钟电路提供秒、分、时、日、月、年信息,可通过 AM/PM 指示决定采用24 h或12 h格式。DS1302与单片机之间能简单地采用同步串行的方式进行通信。模块采用双电源供电,当主电源比备用电源高0.2 V时,由主电源供电,否则采用备用电源,一般是一个纽扣电池。VCC1连接电源+5 V,VCC2连接备用电源,X1,X2引脚连接晶振,为芯片提供脉冲,与主控制器芯片的连接为SCLK、I/O、RST3条线,具体时钟电路如图10所示。
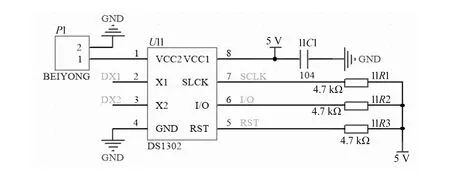
图10 实时时钟电路
4.3 电机推杆控制模块
本文选用自带电位计的电机推杆,电位计可以用来反馈电机电阻的大小,从而反映推杆的行程位置,最终达到控制推杆在行程中任一位置的目的。电机推杆所用驱动方式为直流电机驱动,当电动推杆正常上电时,电机推杆上升,当电源正负极反接时,电机推杆下降,达到控制电机推杆伸缩的目的。用两个继电器来控制电机推杆中直流电机的正反转。因单片机电流较小,不能直接驱动继电器,因此采用如图11所示的功率驱动。三极管有着开关和放大电流的作用,并接一个二极管保护电路。

图11 电机推杆控制模块
4.4 中断电路
中断电路用于手动调节电机推杆内直流电机的转动,共有两个按钮,每个电路都由1个下拉电阻与1个按钮组成,当按钮按下时,电路接通,直流电机开始正转或反转。如图12所示。
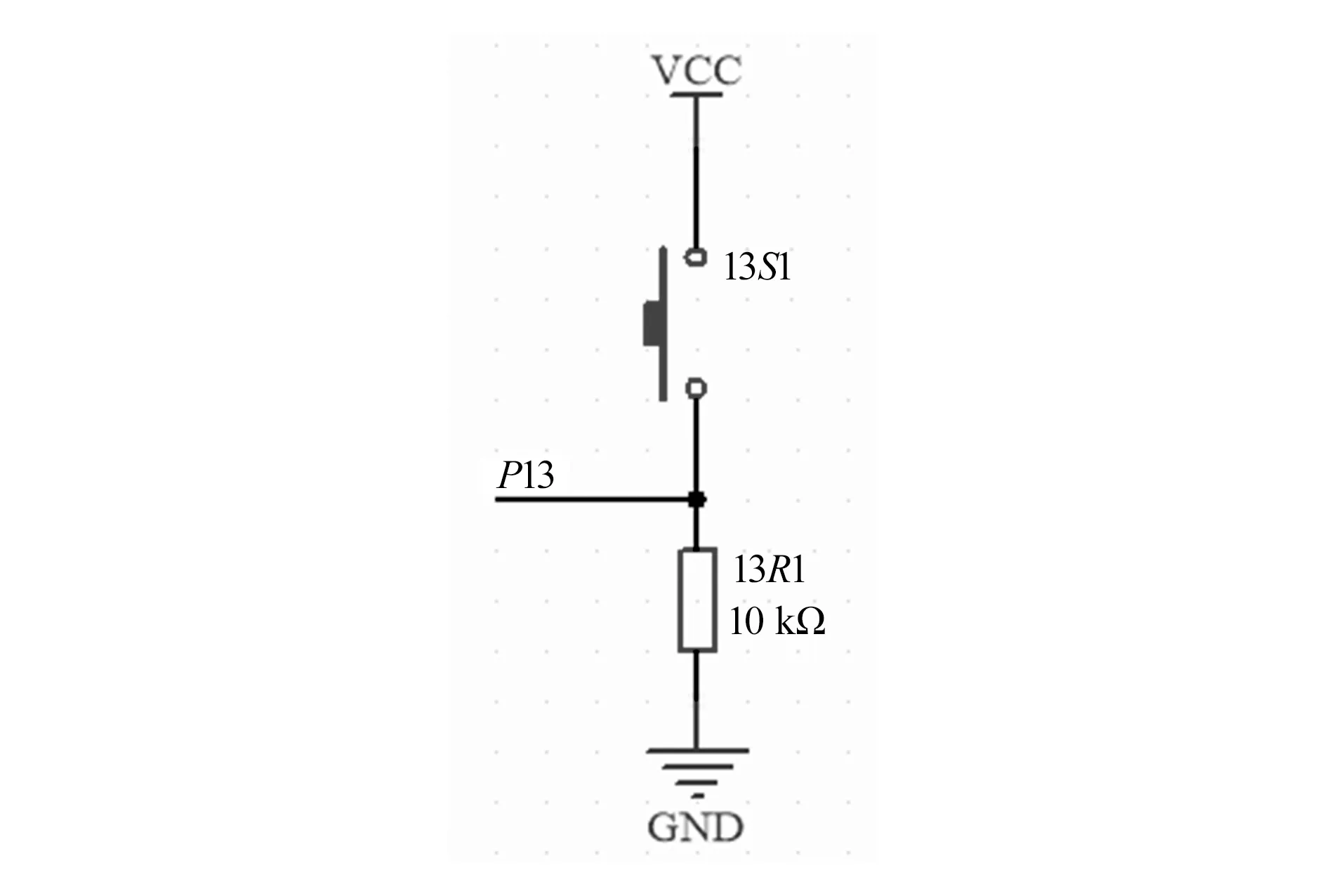
图12 中断电路
5 追踪系统软件设计
太阳能光伏自动追踪装置工作时间为太阳的光照时期,即工作时间范围为日出时间至日落时间。当时间在日出时间之前或者日落时间之后,保持太阳能电池板处于初始位置(倾斜角80°),如果时间在光照时间内则进入追踪程序,若不在光照时间内则过一段时间再次进行判定,程序结构框图如图13所示。

图13 驱动装置工作判定
总体程序需要实现的功能:GPS信息筛选,为太阳高度角的计算提供准确的纬度信息;通过调节电机推杆的伸缩长度来改变太阳能电池板的倾斜角,便于追踪设置的调试;由当地的纬度信息以及实时时间求出太阳赤纬角与太阳时角,进而得到太阳高度角,进一步得到推杆所需伸缩的长度,由电机推杆控制电路控制电机推杆伸缩到指定位置,完成太阳能电池板追踪行动。程序的大致流程图如图14所示。
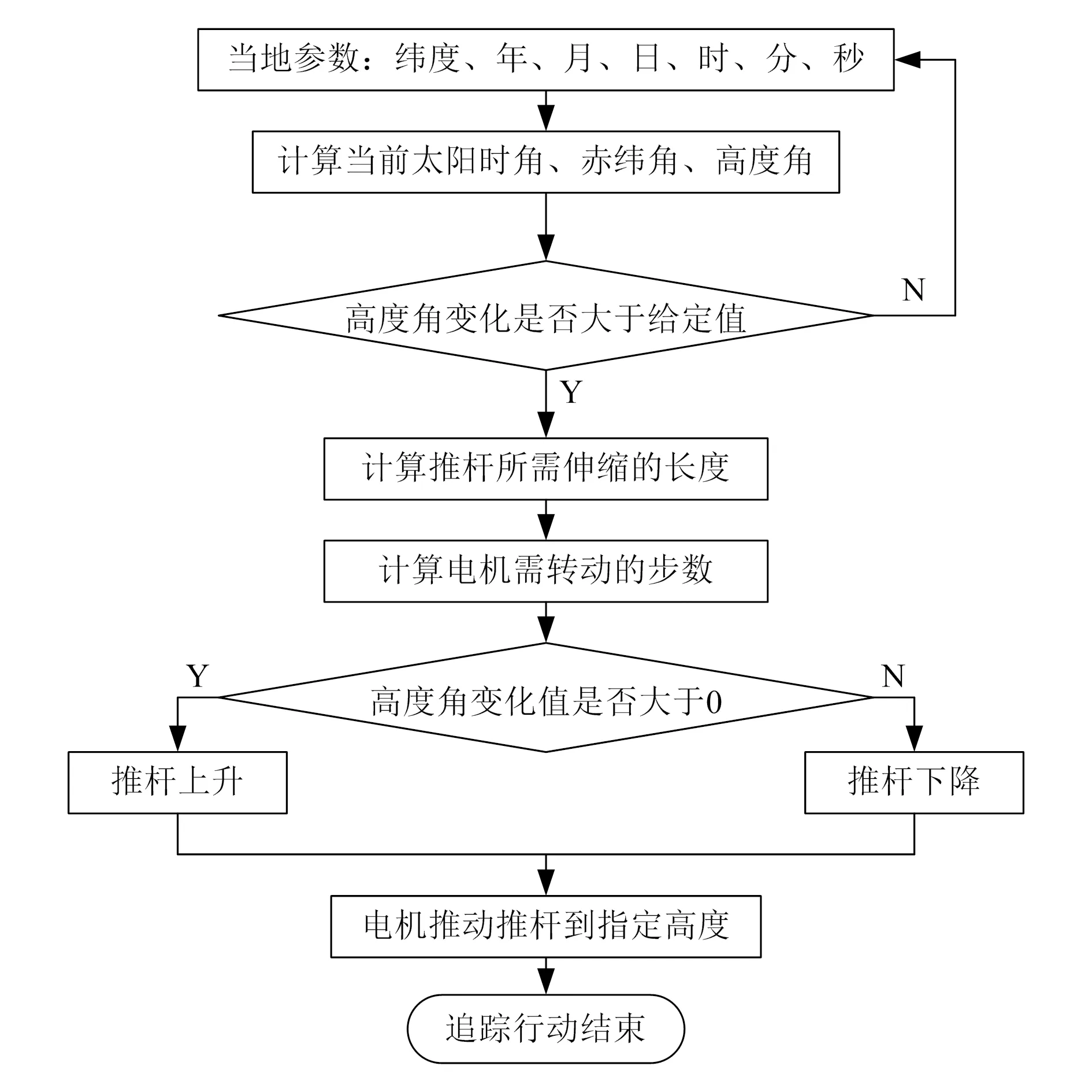
图14 追踪流程图
设置阈值为1.5°,当太阳位置与追踪装置角度差大于1.5°时,太阳能光伏自动追踪装置开始工作,使电机推杆运动由计算得来的伸缩距离完成追踪。太阳高度角在一天的光照时段里先增大后减小,因此电机推杆上午向上伸,下午向下缩,最终位置应在初始位置附近。
完成整个装置的调试之后,对南京地区(北纬32°)5月1日(积日121)9:00和13:00进行电机推杆高度测量,将电机推杆高度转换为追踪装置角度,每6 min测试一次,并与由公式(1)计算得出的太阳高度角进行比较,如图15所示。
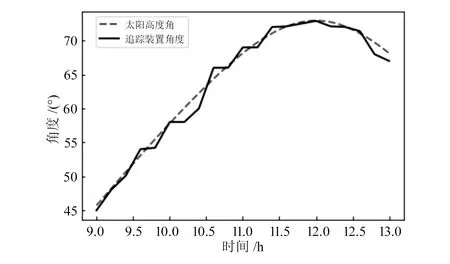
图15 太阳高度角对比
由图可知,有些时段误差超过1.5°,推测误差较大的原因可能为风力的影响或公式计算存在较大误差。
6 结束语
本文主要的研究内容及成果归纳如下:根据追踪装置的剖面图得到与高度角有关的运动模型,将角度的变化归纳为电机推杆的高度变化;根据太阳的运动规律,提出了一种优化后的追踪方式并得到仿真图像,验证了其可行性;控制方面,设计了以STM32为核心的电路结构,并完成了嵌入式系统的编写调试。由于个人水平与时间的关系,仍存在着许多不足之处:对于方位角的影响只是简单的用4片电路板来抵消,仍存在着较大的影响,应采用更加精密的方法;追踪控制算法较为简单,应采用更加复杂、智能的控制方法;外界影响因素如风力、阴影等没有考虑在内。后续应当改进。
猜你喜欢
再生资源与循环经济(2022年8期)2023-01-06
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
航空维修与工程(2022年4期)2022-06-06
东方收藏(2021年11期)2021-11-25
山东工业技术(2019年15期)2019-05-31
电子技术与软件工程(2018年23期)2018-02-28
北京航空航天大学学报(2017年1期)2017-11-24
数码世界(2017年7期)2017-07-25
中国核电(2017年1期)2017-05-17
