
基于数字孪生技术的微型智慧工厂物理和虚拟交互平台设计
2022-09-16 13:04白岩张云峰金文海王艳丽
机床与液压 2022年6期
白岩,张云峰,金文海,王艳丽
(1.北华大学机械工程学院,吉林吉林 132021; 2.公州大学电子电气控制学部,韩国天安 03187;3.中油吉林化建工程有限公司,吉林吉林 132021; 4.吉林省工业技师学院,吉林吉林 132021)
0 前言
工业4.0让智能制造成为工业控制和信息技术研究领域的重要主题。从技术机制的角度看,智能制造需要多技术领域的融合。纵观全球制造业的发展,生产分工越来越精细、控制手段越来越高端、可升级再造的能力越来越强。众所周知,企业的经济效益、产品的输出数量、产品的质量均和市场需求息息相关,对所有制造企业来说,经济和最终产品是提升企业竞争力的核心指标,而这种核心指标的达到,需要生产过程保持高效的安全性、稳定性、连续性和实时性。这种高标准的技术要求对智能制造在生产效率、响应速度、能耗管理方面提出了更新的挑战。
2020年智能制造中有个名词非常炙热,即“生命周期”,一个产线乃至一个工厂的生命周期包括基础规划、开发设计、硬件建造、生产控制、流程调试及后期的升级和再造阶段。每个阶段中的人员调度、设备利用率、数据信息检测、故障诊断和排查、环境和电磁干扰等都会在整个生命周期以不同的方式进行数据交换。从技术实现角度,控制方案的设计需要策略,从生产控制的角度,控制过程需要调试,从经济效率的角度,产线的运行需要完成至少一个全生命周期。
本文作者以印章加工微型智慧工厂物理平台为研究对象,通过设计物理平台控制系统,结合数字孪生技术,建立多维和多应用策略的仿真模型,验证数字孪生的适用性和效果,实现智能信息的收集、智能操作的控制和控制人员的智能管理,为后续的小型智能制造企业提供参考,同时也解决了目前缺乏具体的数字孪生着陆方法的问题。
1 微型智慧工厂物理架构
本文作者所构建的微型智慧工厂物理平台由智能仓储、柔性输送、智能制造、智能装配等4个单元组成,所涉及的硬件及控制设备包含:搬运机器人、视觉测量仪、智能装配机器人、柔性输送线、电子标签辅助拣选(RFID)、立体化仓库、AGV、数控铣床、数控车床、自动点胶机、PLC、直流电机、伺服系统、触摸屏、工控机、工业交换机等。其微型智慧工厂物理平台整体结构如图1所示。

图1 微型智慧工厂物理平台
1.1 智能仓储单元
智能立体仓库控制系统完成材料和产品成品的出入库操作,由1套西门子S71200PLC及其数字量扩展模块、3台步进电机、1套触摸屏组成。该智能仓储整体结构如图2所示,智能仓储I/O分配如图3所示。

图2 智能仓储整体结构
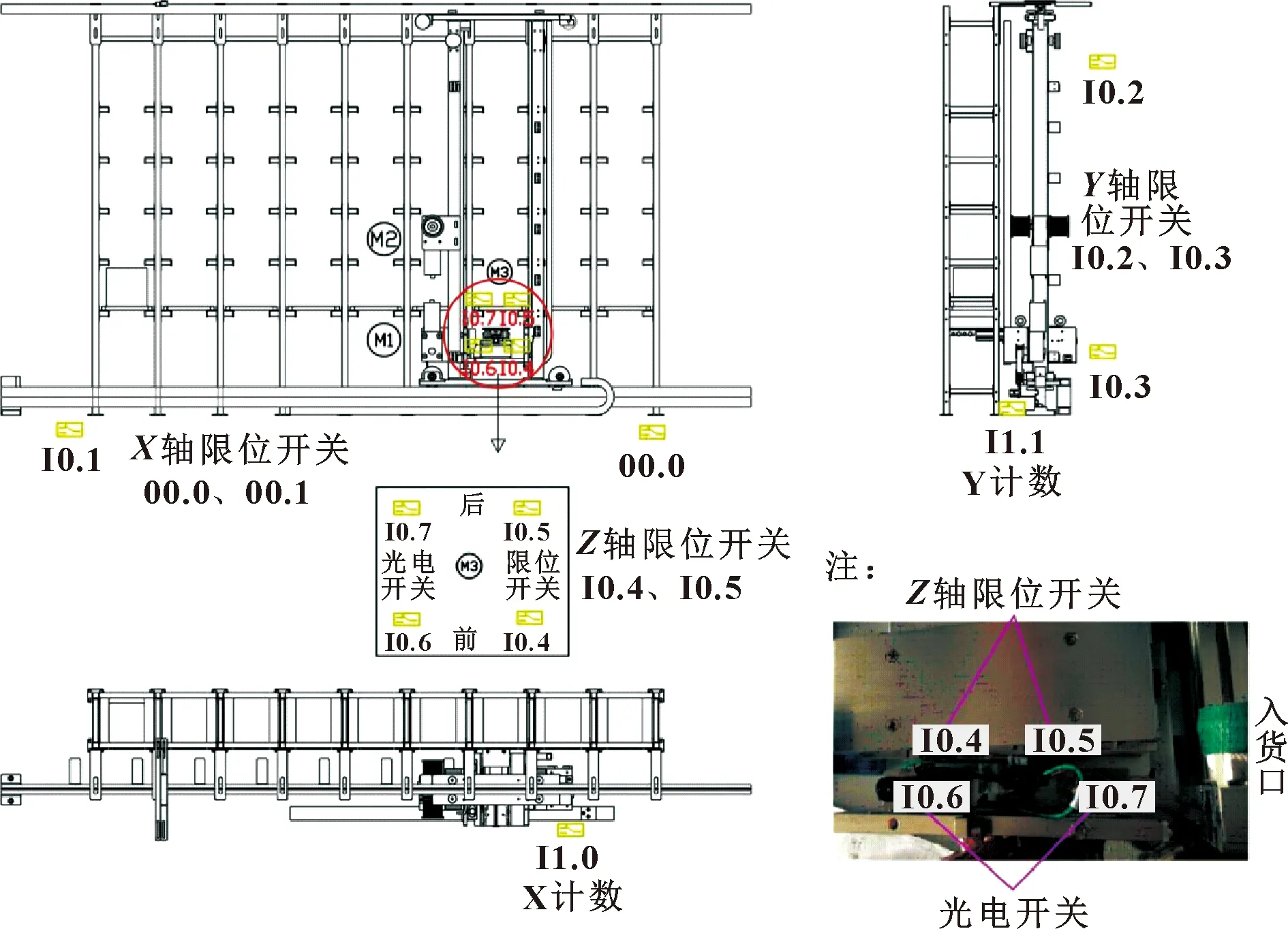
图3 智能仓储I/O分配
1.2 柔性输送线
柔性输送线完成物料的传送,有5个入货口、4个加工出口、1个检测口、1个装配口及1个出货口,最大可承载9个托盘。输送线可实现柔性化调度,入货口和出货口均布置有RFID读写器,可为柔性调度提供辅助决策信息,使用PLC控制,与调度系统间采用OPC协议进行通信。I/O通信定义如表1所示。柔性输送线结构如图4所示。
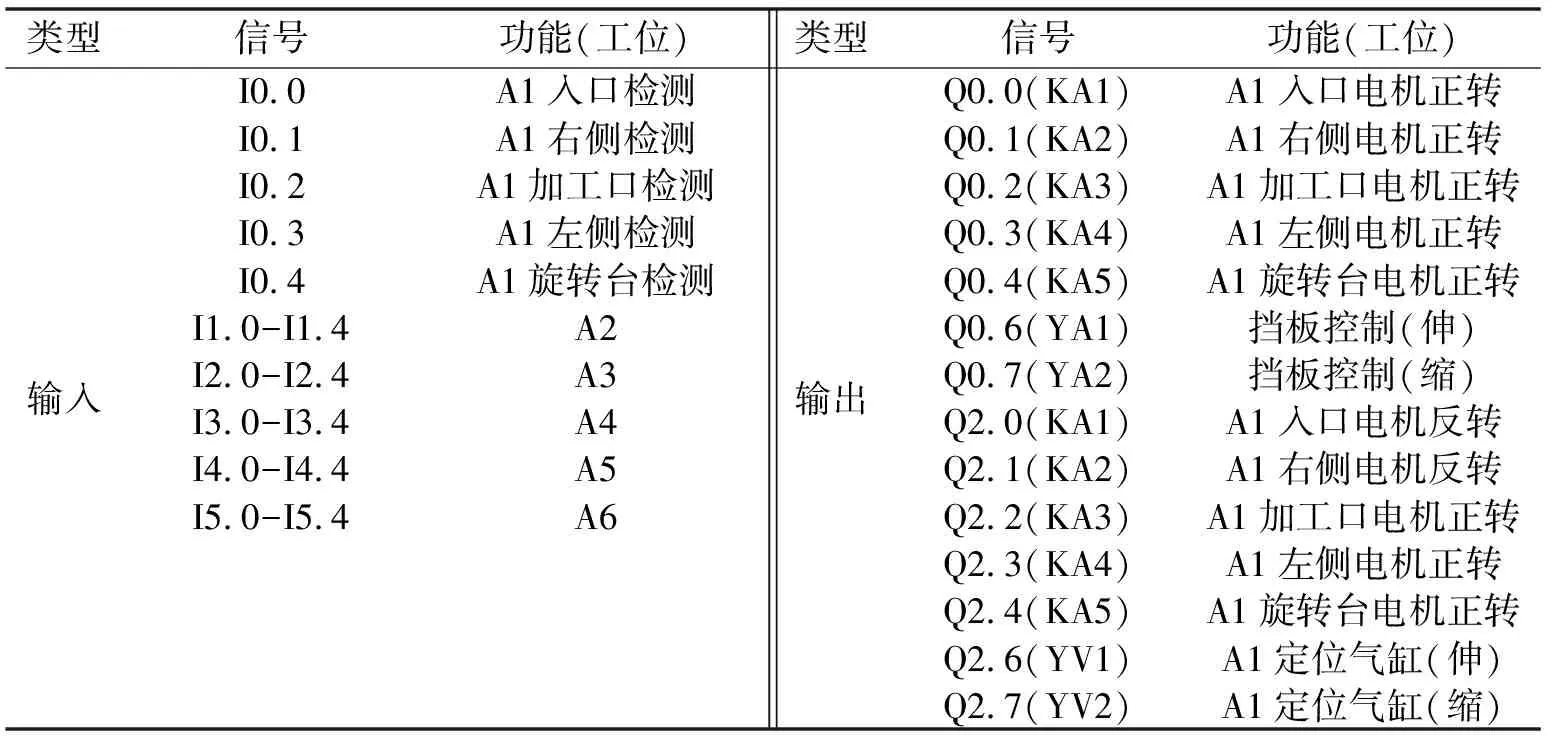
表1 I/O通信定义
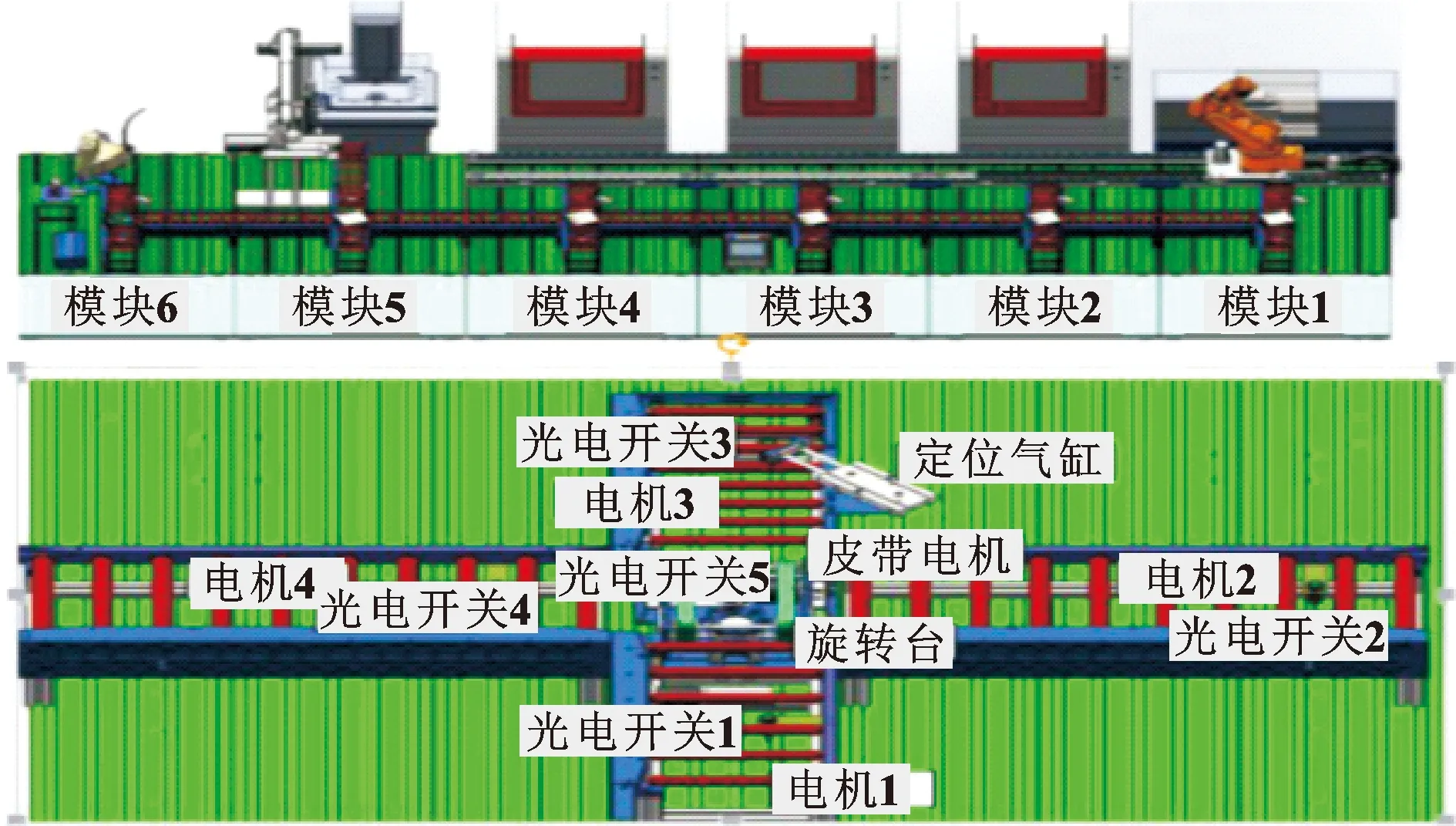
图4 柔性输送线
1.3 智能制造单元
智能制造单元的功能是完成订单材料的机械加工。整个印章的加工切削和加工过程由ABB机器人、数控车床、数控铣床、触摸屏、视觉检测仪共同实现。系统控制流程如图5所示。
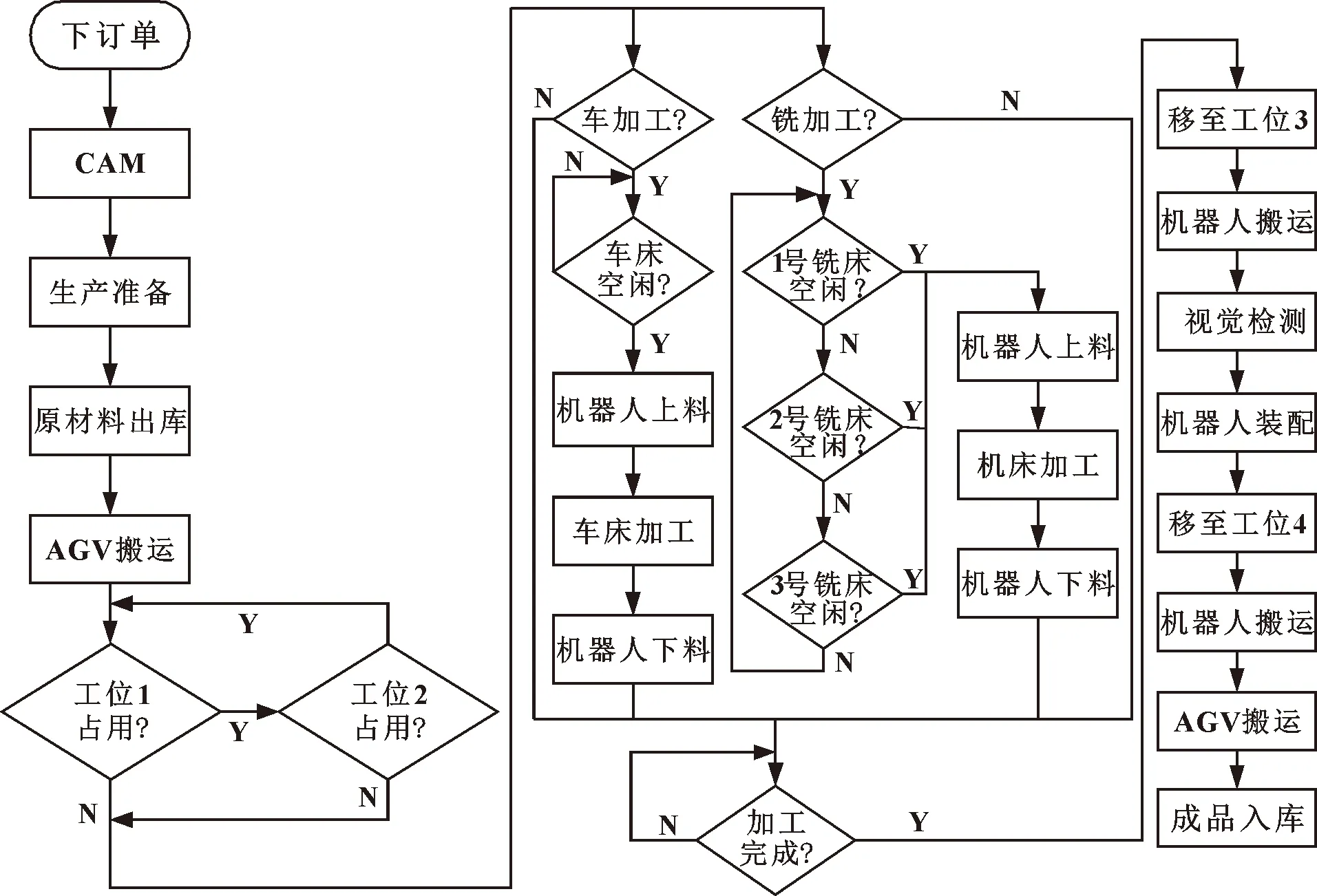
图5 系统控制流程
1.4 智能装配单元
智能装配单元采用雅马哈四自由度机器人抓取点胶机喷头完成印章矩形印刻体和印章手柄圆柱体之间的喷胶粘贴工作。系统伺服控制方案如图6所示,控制系统实物如图7所示。
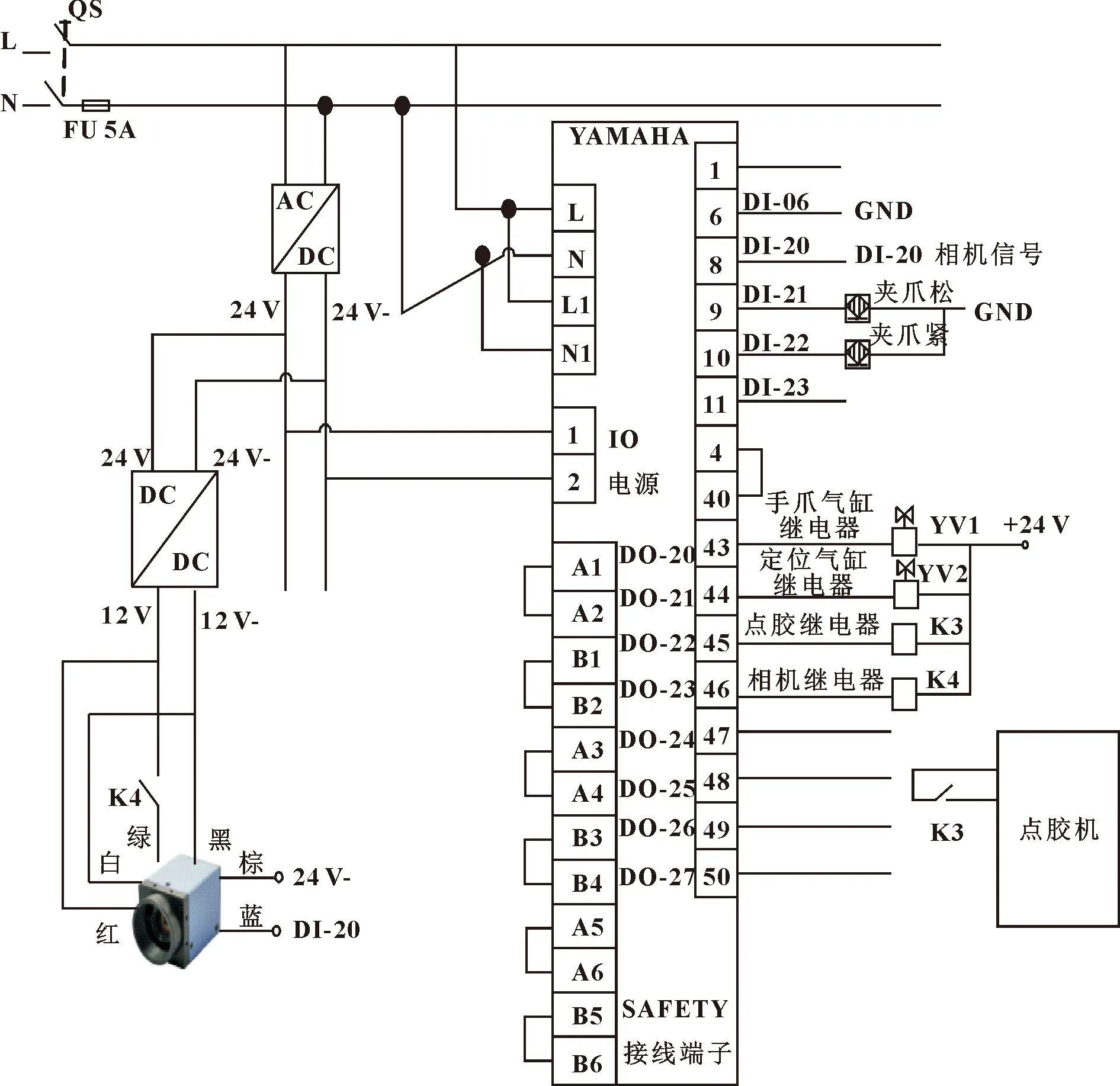
图6 装配机器人伺服控制系统

图7 装配机器人伺服控制系统实物
2 微型智慧工厂数字孪生体的构建
2.1 数字孪生体的设计目标
微型智慧工厂数字孪生体模型可以实现物理制造和虚拟制造之间的有效交互。例如,经过编程和自动处理后,可以将机器和设备的操作以及人员流动和后勤等数据(包括时间、节奏和故障等数据信息)直接用于仿真模型的数据输入,然后通过仿真模型获得关键数据信息,并用于反馈规划决策或实际优化。
考虑到智能制造在规划工作中的一般要求,数字孪生模型旨在实现以下目标:
(1)可以快速构建用于生成的仿真模型,使用包括物联网数据和微型智慧工厂各设备数据在内的历史数据作为仿真建模的参考;
(2)能够满足现代制造业特殊工艺制造过程的仿真要求;
(3)仿真模型可以灵活地适应生产方式和工艺流程的调整和变化,通过更改模型的组件连接和参数,能够适应小型制造生产计划任务,如生产线的升级和再造;
(4)具有通过使用仿真模型模拟材料供应和市场需求不稳定状况的能力。
2.2 数字孪生体的理论基础
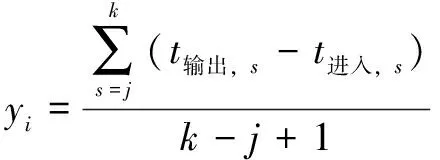
数字孪生体模型涉及时间和效率等核心指标,例如平均节拍时间、生产周期中的平均性能、平均故障间隔时间、故障矩阵的平均恢复时间以及数据波动间隔的幅度。根据PLC和CNC获得的个行业大数据,计算出主要的仿真数据逻辑公式,得到公式(1)和公式(2)。
(1)
其中:为平均故障开始时间;为平均故障结束时间。
(2)
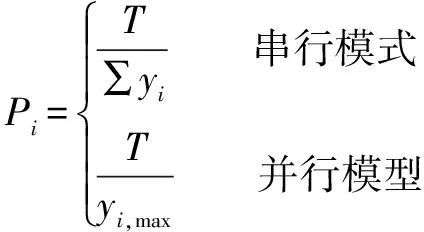
其中:为加工工位性能;为加工时间;∑为产线内部进程之和;,max为最大进程输出能力。
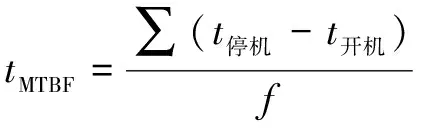
公式(1)显示了如何计算处理站(机器)的性能。在实际的生产线中,一个处理站可以包含多个可能的过程。因此,处理站(机器)的性能计算有两个可能的公式。使用哪个公式取决于过程之间的关系,如果多个进程是串行关系,则处理站的性能取决于其所有内部进程的总节拍时间,如果多个进程是并行关系,则处理站的性能取决于最大进程所有内部流程的节拍时间。平均故障间隔时间(Mean Time Between Failure,MTBF)是生产设备正常运行期间机械或电子系统周期性故障之间的预计时间间隔,为系统每两次故障之间的算术平均时间,如公式(3)所示:
(3)
其中:为故障次数。
在每次观察得到的或自动收集的数据中,停机时间是发生故障的瞬间,该时间大于最后一个开机时间,即两个时刻之间的时间差(停机时间减去开机时间)是机器在这两个事件时刻之间运行的时间。每个生产设备的MTBF是其可观察到的总运行时间除以可观察到的故障的总数。
公式(4)显示了如何在特定时间段内(例如,故障序列号从到之间的时间段)从特定指定站点的数据计算出机器的MTBF。在计划类型的仿真问题中,在计算MTBF时应同时考虑机器停机时间(机器错误/维护)和异常间隔(如操作员造成的中断)。公式(5)显示了如何计算平均恢复时间MTTR。计算MTTR和MTBF使用两组不同的时间段,是两组完全互补的时间段(它们只是形成完整的时间段)。公式(6)表示如何根据一组实际序列数据计算指定参数的幅度,从而使仿真结果尽可能接近实际微型智慧工厂的环境。
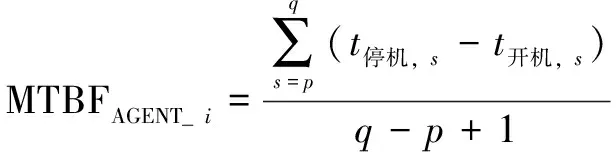
(4)
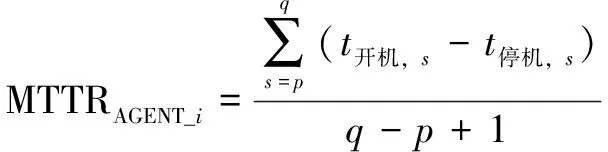
(5)
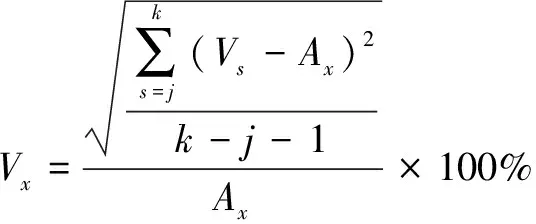
(6)
其中:、分别为变量原始数据、平均值;、为实际的IIOT序列数据;∈{包含任务,执行阶段,平均故障时间,平均恢复时间}。
利用以上公式可以为计划方案计算尽可能接近实际物理环境的模拟变量,并可以根据这些模拟变量设计不同的计划方案;通过仿真输出不同计划模型的模拟生产结果,以评估不同计划方案中的关键指标。
2.3 数字孪生体模型的设计过程
在微型智能工厂的物理实体中,同一级别的每个单元通过物料流和能量流耦合,而在数字孪生系统中,则通过参数耦合。输入前一单元输出的一部分作为后一单元的操作参数,并且通过物理层的实际操作状态生成映射结果。
数字孪生模型的建模功能可确保数字模型构造的尺寸和真实的物理结构得到完整而准确的反映。构建主要是根据受控对象的控制功能进行,实现各种智能设备之间的无缝连接。
数字孪生体的变量和参数如表2所示。
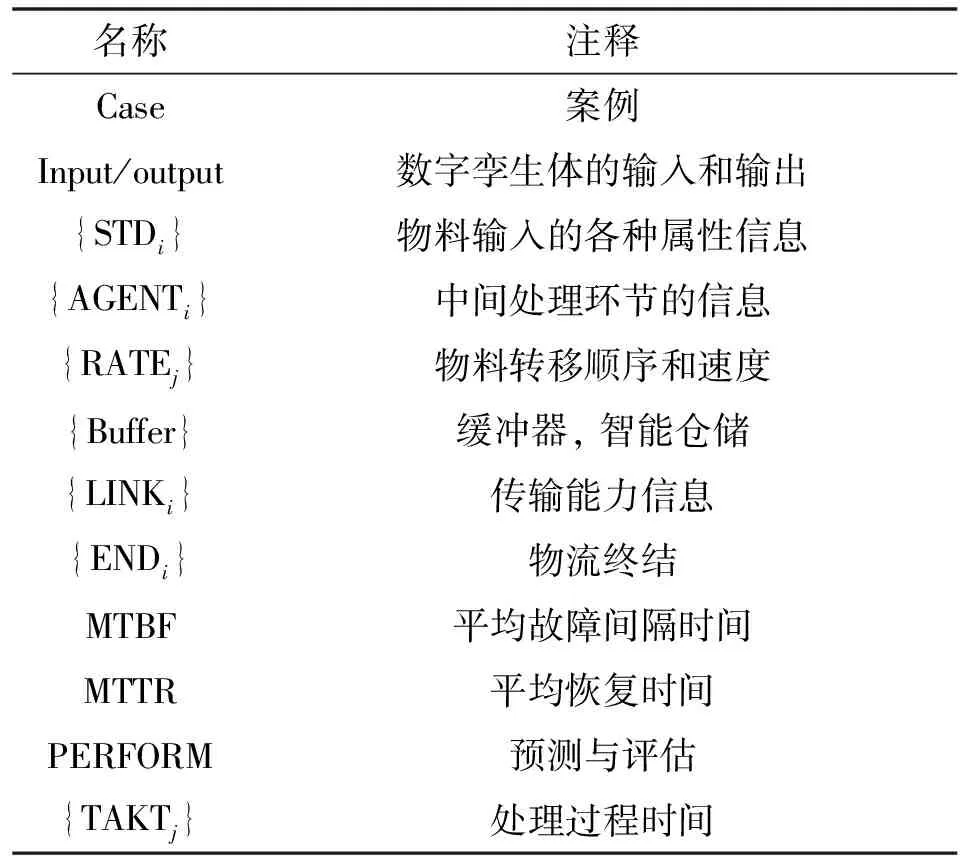
表2 数字孪生体变量和参数
数字孪生模型的设计过程:
(1)统计生产线的基本信息,如车间布局、物流路线、原材料输入、中间缓冲区和最终产品输出;
(2)根据现有历史数据,调整初始模型,建立运行并输出模拟结果的生产过程的模拟模型;
(3)根据现有工厂生产线的物联网历史数据,更新与制造过程相对应的模型参数,并在仿真平台上实现模型的构建和完善;
(4)输出模拟结果,以评估相应物理智能工厂输出的关键性能指标,包括每个站点、缓冲区、运输线的负载情况以及导致生产输出问题的位置。
根据仿真分析结果,确定智能工厂的最终计划方案。根据上述设计要求,数字孪生模型如图8所示。
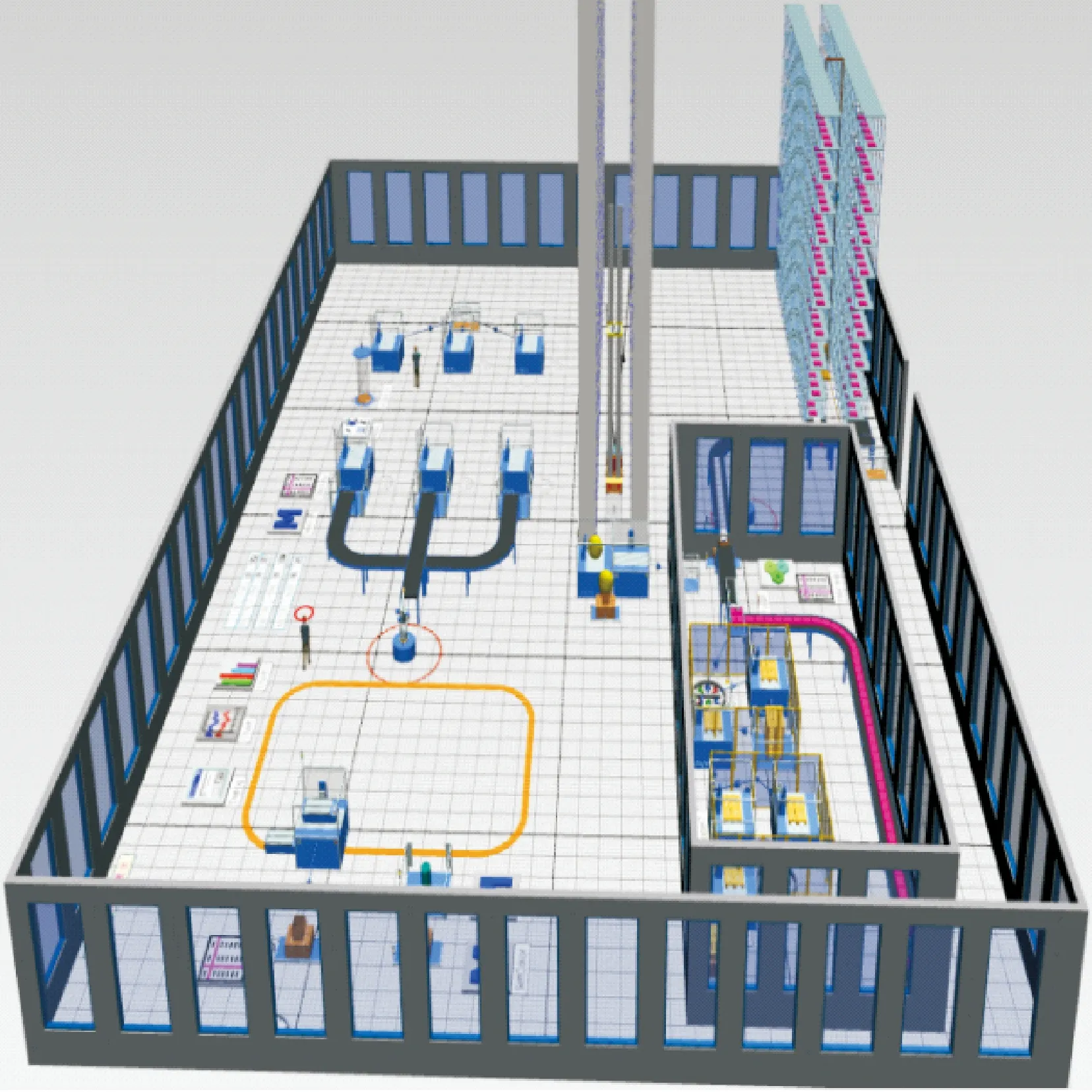
图8 数字孪生体模型
从微物理智能工厂获取工业数据,并计算相应的模拟输入数据(包括微智能工厂生产线的总输出能力、单个工位的负荷情况、设备和模拟工人的繁忙程度)等,以指定的生产周期(1天的智能工厂连续工作24小时)进行评估。获取的材料数据源信息如表3所示,加工信息如表4所示。
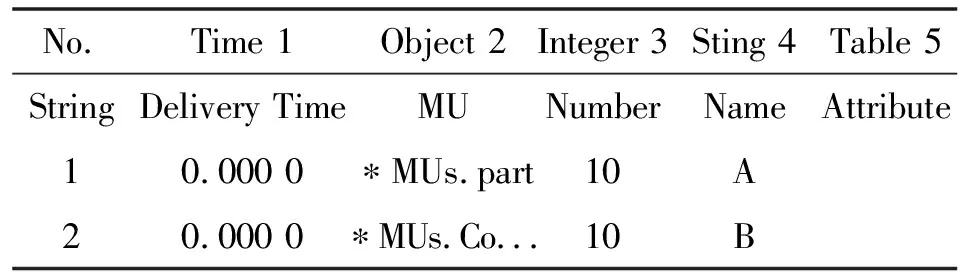
表3 材料数据源
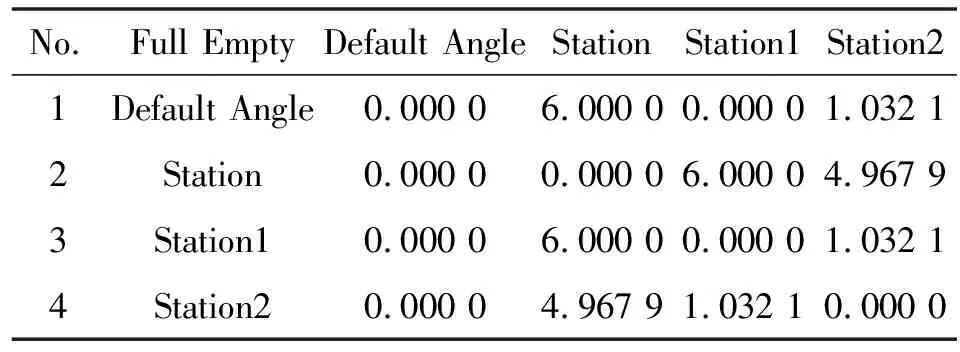
表4 加工信息
数字孪生技术可以降低硬件系统设备诊断的难度,提高诊断的准确性和可靠性,并确保设备的可靠运行。工站的故障率统计如图9所示,工人的工作效率统计如图10所示。

图9 工站的故障率
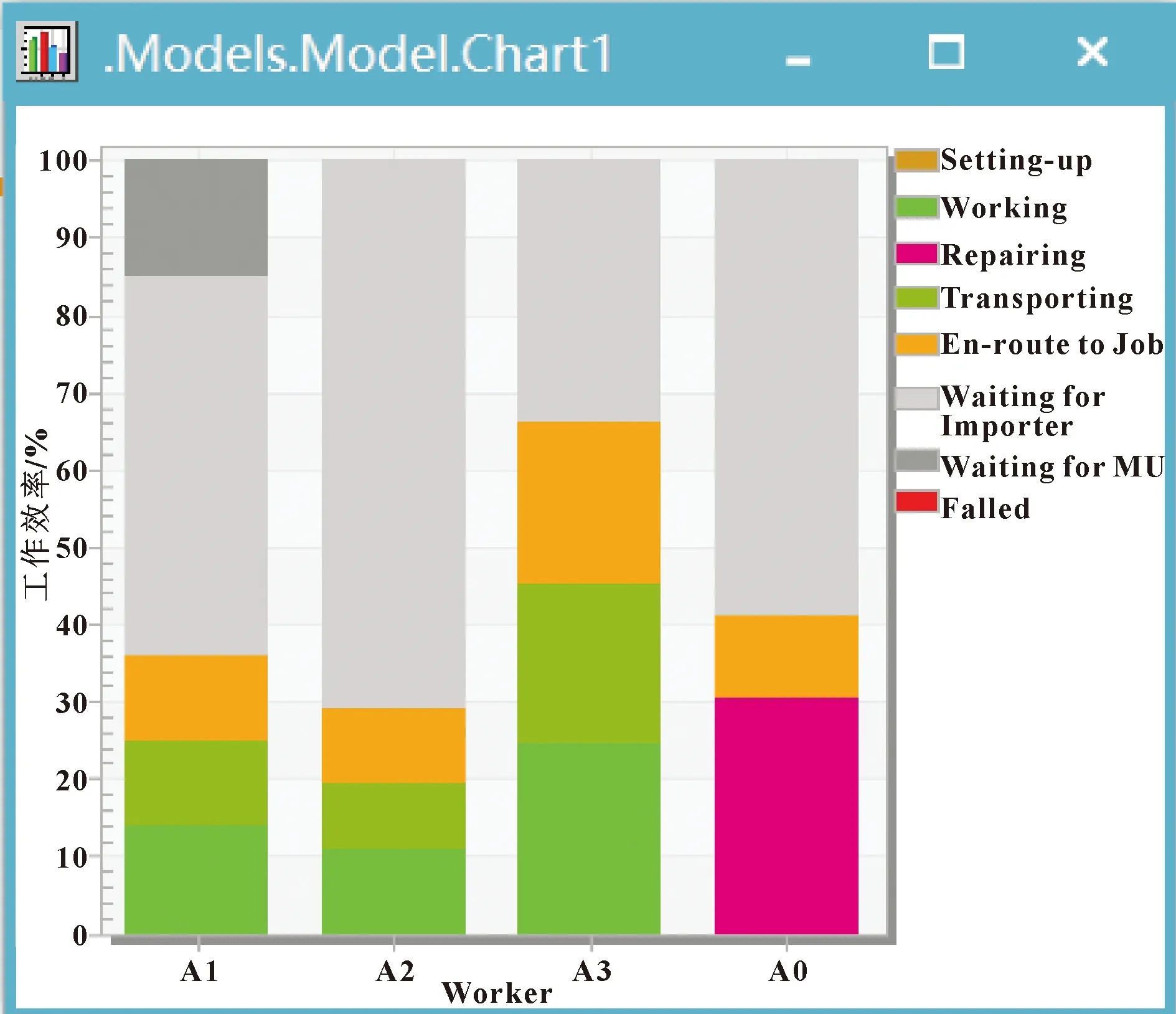
图10 工人的工作效率
数据计算过程如下:
var tbl : table
tbl.create
Chart.putValuesIntoTable(tbl)
Chart.inputChannels.copyrangeTo({0,0}..{0,*},Datatable,1,1)
Chart.inputChannels.copyrangeTo({0,0}..{*,0},Datatable,1,1)
tbl.copyrangeTo({1,1}..{*,*},datatable,2,2)
tbl.forget
tbl.create
Chart1.putValuesIntoTable(tbl)
Chart1.inputChannels.copyrangeTo({0,0}..{0,*},Datatable,1,12)
tbl.copyrangeTo({1,1}..{*,*},datatable,2,13)
3 结论
本文作者研究的微型智能工厂的物理平台是真实微型智慧工厂的映射。根据小型智能制造工业生产过程的特点,完成了数字孪生工厂的建模,并通过数字孪生技术解决了过程工业建模的复杂难题。展示了数字化双胞胎技术下数字化工厂的过程故障诊断与设备维护,以及生产过程的自组织和自操作。该控制方案和孪生体的设计为其他过程工业数字化双胞胎系统的研究提供了参考。后续将深入研究如何有效提高生产质量,实现节能减排,提高数字孪生模型的准确性以及与实体进行独立交互的安全性。
猜你喜欢
中国典型病例大全(2022年13期)2022-05-10
新高考·高二数学(2022年3期)2022-04-29
新高考·高二数学(2022年3期)2022-04-29
内燃机与配件(2022年2期)2022-01-17
科技研究·理论版(2021年22期)2021-04-18
语文世界(初中版)(2018年2期)2018-03-07
小学阅读指南·低年级版(2016年1期)2016-09-10
小溪流(画刊)(2016年5期)2016-05-14
新高考·高一物理(2014年4期)2014-09-17
数学大世界·小学低年级辅导版(2010年8期)2010-06-28
