
基于机床旋转轴角加速度的五轴加工刀轴矢量局部优化
2022-09-15 09:14:48赵恒周鑫张森堂
机床与液压 2022年11期
赵恒,周鑫,张森堂
(中国航发沈阳黎明航空发动机有限责任公司,辽宁沈阳 110043)
0 前言
由于五轴加工比三轴加工多2个额外的旋转自由度,因此具有更好的加工效率及加工可达性。同时,由于五轴加工在加工方式上的灵活性更强,更适用于加工处理表面形貌复杂的零部件。但是,自由度的增加也会带来刀轴矢量控制以及光顺方面的难题,且由于五轴加工的加工效率、工件表面质量以及机床进给率等都与刀轴矢量光顺程度息息相关,在进行刀轴规划时,刀轴矢量的光顺处理成为重要的课题。
为实现刀轴矢量光顺,提高加工效率和加工质量,研究者提出了3种优化思路和角度,即分别在局部坐标系、工件坐标系、机床坐标系内对刀轴矢量进行光顺处理。LIN等基于刀具在局部坐标系中的倾角,建立可行的刀具倾角范围,并在此范围内选取合适的刀轴矢量,以提升加工表面质量。LEE分析加工曲面局部微分几何特性,通过约束刀具在局部坐标系内的转角,控制加工表面误差。FU等在几何误差补偿过程中,采用粒子群优化算法对局部坐标系内刀具倾角进行优化,从而有效控制加工表面纹理及几何误差。吴宝海等通过推导刀具有效切削轮廓,分析刀具在局部坐标系内的倾角与走刀行距之间的关系,给出刀具姿态的计算方法。罗明等人通过限制刀具在局部坐标系内倾角的变化,结合刀具无干涉发生的条件,给出在局部坐标系内变化均匀的刀轴矢量。上述刀轴矢量优化均在局部坐标系内进行,且未考虑机床旋转轴运动学特性的限制,同时,由于刀触点局部坐标系到机床坐标系的运动学变换属于非线性变换,刀轴矢量在工件坐标系及机床坐标系内的光顺性难以保证。
考虑到刀轴矢量由刀触点局部坐标系到工件坐标系属非线性变换,在工件坐标系内对刀轴矢量进行光顺处理成为刀轴矢量光顺的另一种处理手段。基于工件坐标系的刀轴矢量光顺策略具体体现为,在保证几何形貌误差及加工效率等其他加工特性的同时,尽可能实现刀轴矢量的光顺变化。JUN等将刀轴矢量可行域以C空间子集的形式予以表示,随后在C空间内以残高及工件表面几何特性等为约束,优化生成工件坐标系内光顺变化的刀轴矢量。HO等综合加工误差检测及优化算法,利用四元数插值的方式,在工件坐标系生成无干涉且光顺性较好的刀轴矢量。以上方法的实现均基于刀轴矢量表达于工件坐标系内这一前提,因此光顺对象是刀轴矢量在工件坐标系内的分量(、、)。由机床的逆向运动学可知,工件坐标系到机床坐标系的变换仍属于非线性变换,因此,刀轴矢量分量的光顺程度并不能保证机床旋转轴角度的光顺变化。在仿真和实际加工中,未对机床旋转轴进行动力学方面约束的刀轴矢量光顺方法,仍有可能出现机床在局部发生运动学性能超限,不利于实际加工。
近些年来,对刀轴矢量光顺性的研究方向已转变为直接在机床坐标系内对刀轴矢量进行光顺处理。XU等通过推导由刀触点局部坐标系到机床坐标系的逆向运动学变化过程,提出各种结构的五轴机床的机床旋转轴角度变化光顺性指标,并采用三次样条插值的形式,对刀轴矢量进行光顺处理。PLAKHOTNIK和LAUWERS将机床旋转轴角度变换作为优化对象,采用Dijkstra算法,寻求加工路径上刀轴矢量变化的最短路径,从而达到刀轴矢量的光顺变化。以上方法均直接在机床坐标系内对机床旋转轴角度进行规划处理,获得机床坐标系意义下的光顺刀轴矢量。XU等以机床坐标系下刀轴矢量光顺为目标,并通过轮换迭代的方式对干涉进行消除,实现了旋转轴角加速度的优化。WANG等通过微调局部刀具姿态,在遵循干涉碰撞约束及机床运动学性能约束的前提下,兼顾了加工过程中的切削性能。
因此,优化五轴机床刀轴矢量的平顺性,应综合考虑旋转轴在机床坐标系内的动力学表现,并对它加以约束。四元数插值法基于工件坐标系,是一种用于五轴刀轴矢量规划的经典的有效方法,经过矢量插值后的刀位文件在工件坐标系下通常具有很好的平顺性表现。利用四元数插值方法得到的刀位文件在机床坐标系下,通常也具有较好的整体表现。同时,经典的四元数插值方法考虑了加工误差的限制,很好地兼顾了加工精度、高效性及刀轴平顺性。但如前所述,由于工件坐标系和机床坐标系之间的非线性变换,工件坐标系平顺变化的刀轴矢量,在经过逆向运动学变化之后,某些区域的动力学特性会超限,不利于加工过程及加工完成质量。针对四元数插值方法在规划过程中的旋转轴角加速度局部过大导致机床负载超限的问题,本文作者提出一种基于四元数插值方法的角加速度超限区域检测并修正的方法。如图1所示,以双转台五轴数控机床的刀轴矢量规划为例。首先,固定易干涉区域内的关键刀轴矢量,基于关键刀轴矢量,利用经典的四元数插值方法,生成整个加工路径上的初始刀轴矢量;然后,遍历初始刀轴矢量,以初始刀轴矢量的角加速度是否超过允许值为条件,判断超限区域;最后,对不满足机床角加速度限制要求的超限区域,采取一种基于机床各旋转轴角加速度分治优化的五轴加工刀轴矢量插值方法,局部修正超限区域的刀轴矢量,得到机床坐标系下满足机床旋转轴动力学特性的刀轴矢量。
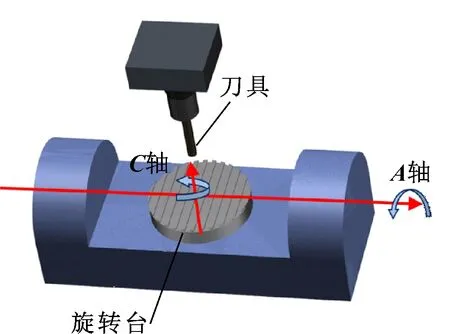
图1 AC双转台五轴机床
1 初始刀轴矢量的产生
以双转台五轴机床为例,介绍四元数插值的算法流程。经典四元数插值算法分为两个模块:四元数插值模块、加工误差检测及优化模块。四元数插值光顺算法的具体流程如图2所示。
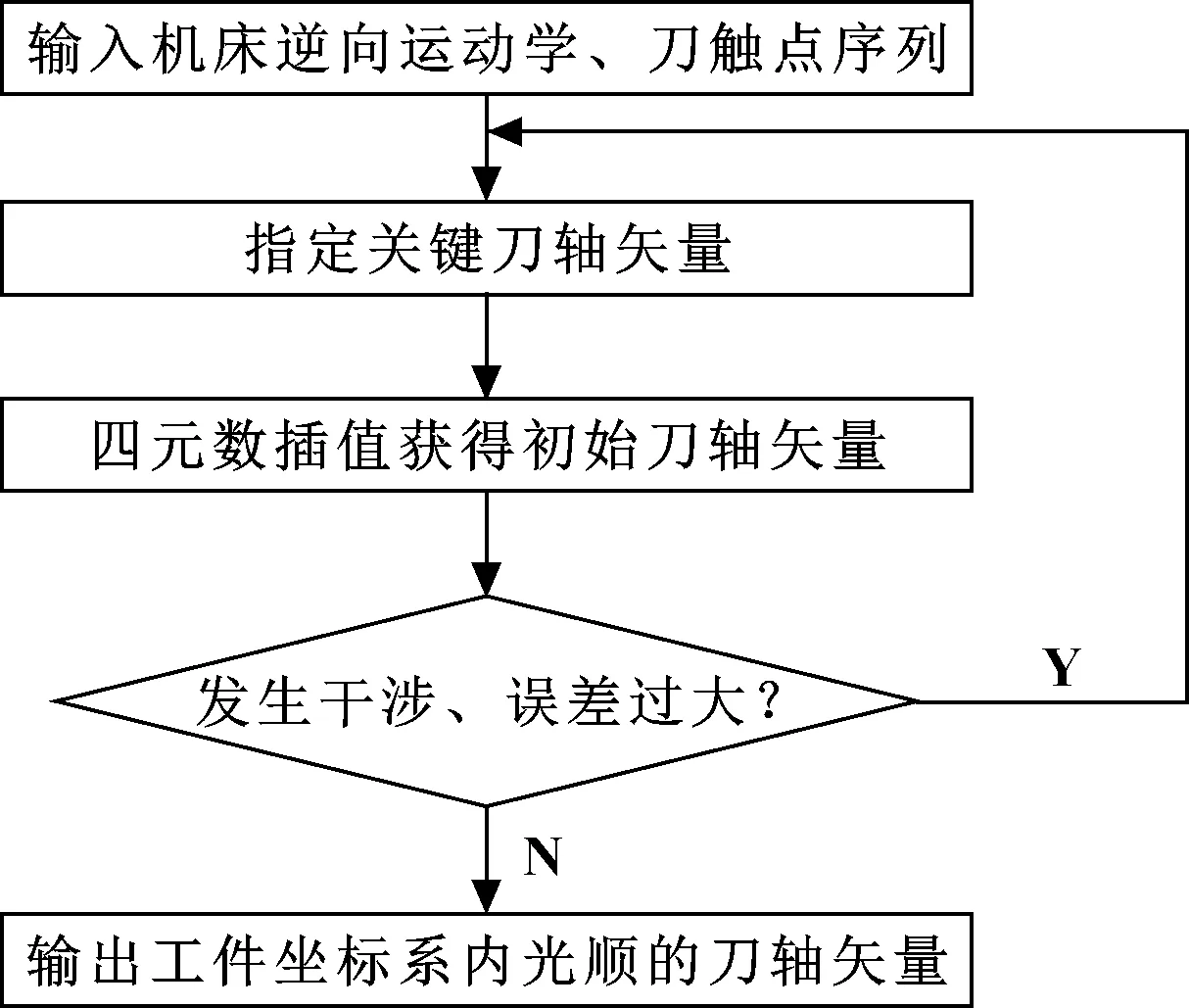
图2 四元数插值光顺算法流程
首先,利用加工几何误差限制及刀具半径,对加工轨迹进行离散,在加工轨迹上生成符合加工误差限制的刀触点序列,完成刀触点的规划。然后,进行刀轴矢量的规划,刀轴矢量的规划过程包含四元数插值过程,以及加工误差检测过程。
1.1 四元数插值模块
四元数插值模块的流程:(1)由用户人为地在曲率变化大、易产生干涉区域设置关键刀轴矢量,指定不发生干涉的关键刀轴矢量,并将所指定的关键刀轴矢量改写为四元数形式;(2)利用矢量插值算法中的四元数插值算法,对关键刀轴矢量进行插值,综合插值所得矢量与关键刀轴矢量,作为刀位文件,具体做法如下。
首先,将插值首尾的关键刀轴矢量利用四元数的形式、表示出来。四元数通常被用于表示三维空间中一对矢量之间的旋转变换关系,拥有4个分量。
=[,]=[,,,]
(1)
在获得首尾刀轴矢量的四元数形式之后,中间刀轴矢量的插值方式如下:

∈[2,-1]
(2)
式中:1,为首末端点刀轴矢量的夹角。若首尾关键刀轴矢量的角度变化过小,为避免除零错误,则采用线性插值。
在完成上述插值过程后,遍历所得的刀轴矢量,检查是否有干涉发生,若发生干涉,则在干涉区域内选取干涉最严重的刀轴矢量位置,重新设置新的无干涉的关键刀轴矢量,并在重新获得的关键刀轴矢量之间进行四元数插值,直至无干涉发生。
1.2 加工误差检测模块
将四元数插值模块中获得的刀轴矢量输入加工误差检测模块,判断所得刀轴矢量是否超出加工误差限制。加工误差的限制可用式(3)表示:

(3)
其中:为圆环铣刀的小圆半径;为小圆圆心;为加工轨迹曲率中心;为两刀触点之间加工误差最大位置处对应的参数,∈[0,1]。具体推导过程参见文献[8]。
若是所得刀位文件在某区域的加工误差超出限制,则在该区域内利用线性插值,插入一中间矢量,直至加工误差落到限制范围之内。
2 超限区域的确定
在实际加工中发现,在利用四元数插值算法获得工件坐标系内光顺的刀轴矢量后,机床运动学性能仍有可能在局部刀位发生超限,进而损害加工性能和加工精度。
因此,有必要对四元数初始规划刀路进行局部修正,而完成修正过程的前提是对所得刀轴矢量进行超限区域的确定。确定不满足机床旋转轴运动学特性的超限区域的过程,实际上是寻找一系列的刀触点索引,使得该索引上的刀轴矢量运动学性能超限。
将刀触点轨迹离散化处理(如图3所示)后,机床旋转轴运动学特性的约束条件可以表述为

图3 刀触点离散
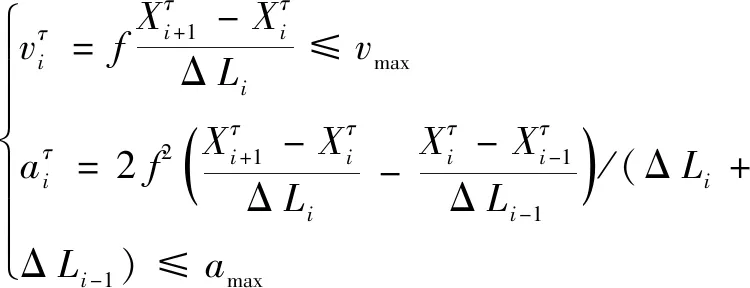
(4)

因此,超限区域的确定过程可转换为如下优化模型:

s.t.-≤≤
(5)

3 局部刀轴矢量优化
在局部刀轴矢量优化过程中,将超限区域内的旋转轴角加速度平方和当作机床旋转轴特性的衡量指标。因此,优化模型可以角加速度变化最小作为目标函数,具体如下:

(6)
结合上述目标函数极小值出现的必要条件∂/∂,=0,可得到如下的线性方程:
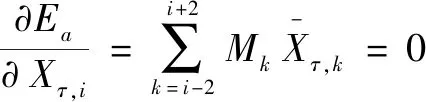
(7)
其中:为求导后的相应系数。为求解上述线性方程组,需人工指定关键刀轴矢量。在局部刀轴矢量的优化过程中,通常将超限区域边界处的刀轴矢量设定为关键刀轴矢量。关键刀轴矢量指定完成后,便可对上述线性方程组进行求解,完成对超限区域刀轴矢量的局部优化。
4 加工实例
利用所提刀轴矢量优化算法对叶轮叶片进行刀轴矢量优化处理,从而验证算法的有效性。仿真实例中机床进给速度设置为3 000 mm/min, 机床旋转轴的运动学限制设置为1 rad/s、10 rad/s。优化前后刀轴矢量如图4所示,利用文中所提超限区域识别算法,确定超限区域为序列点区间为[30,72]。由此也可验证工件坐标系下的刀轴矢量光顺性并不能保证机床旋转轴角度的光顺变化。为此,对所提取的超限区域,应用文中所提的刀轴矢量局部优化算法进行进一步的局部优化处理,以改善局部刀轴矢量的光顺性。
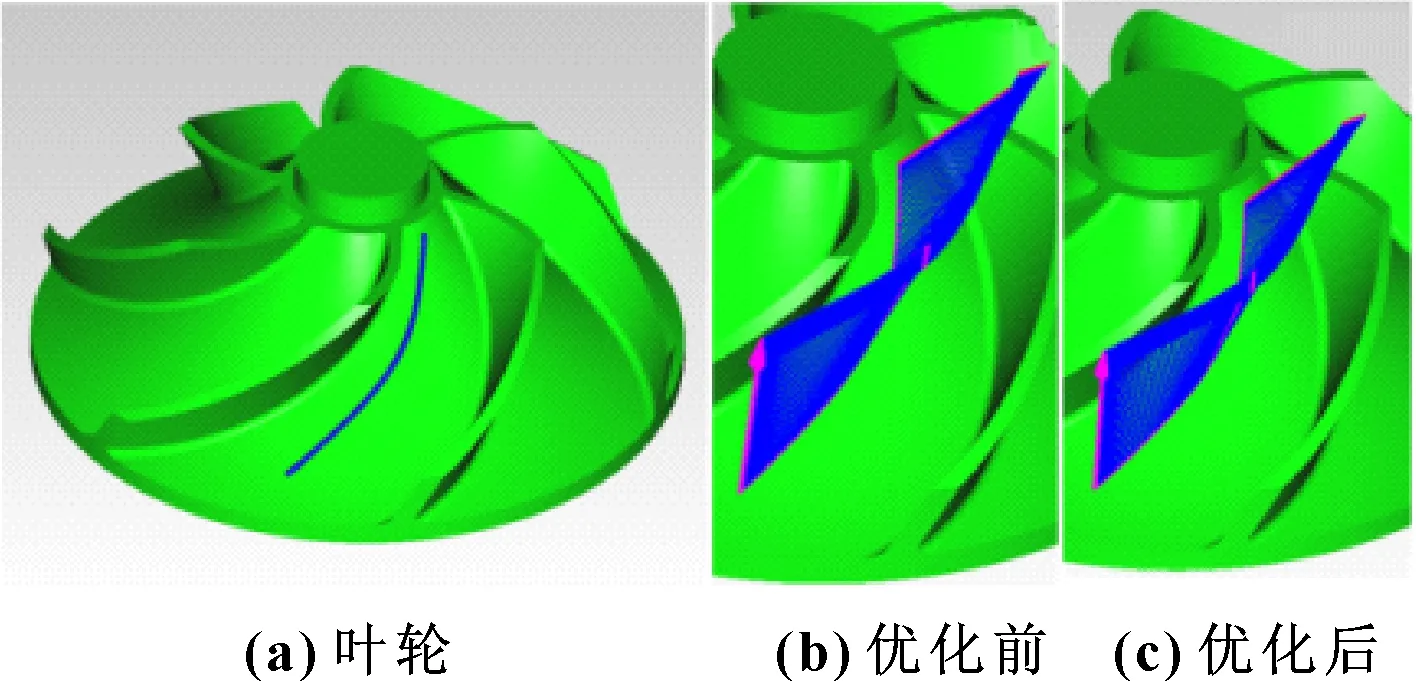
图4 叶轮及优化前后刀轴矢量
优化前后刀轴矢量的角加速度如图5所示。可知:优化后的刀轴矢量保留大部分初始刀轴矢量数据,意味着算法保留了初始规划刀轴矢量较优的切削特性,同时解决了机床旋转轴角加速度在局部的突变,甚至解决了超出机床旋转轴限制的问题,得到真正机床坐标系下光顺的刀轴矢量。
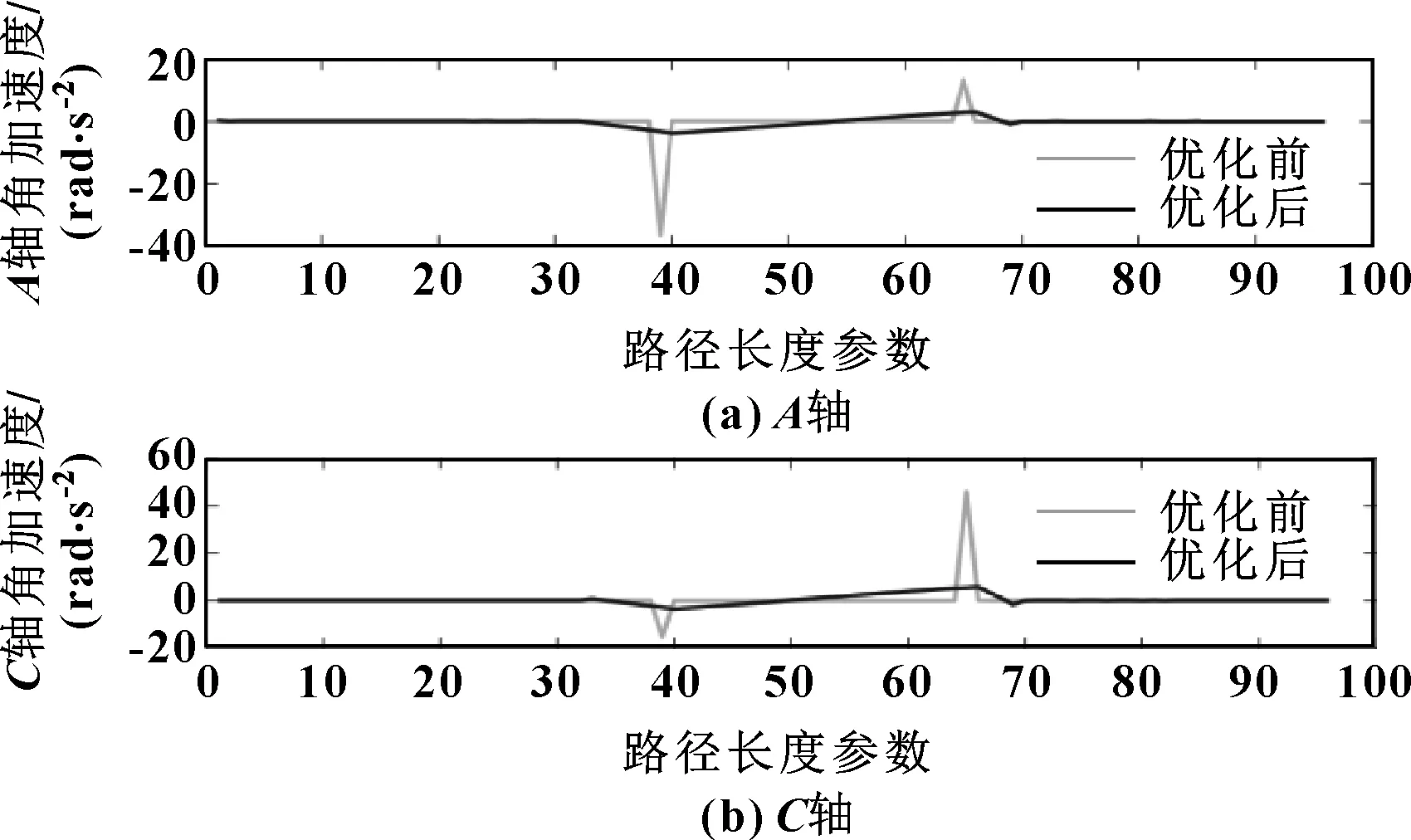
图5 优化前后的机床旋转轴角加速度
5 结语
(1)针对现有刀轴矢量光顺算法仅考虑全局光顺的不足,提出一种基于机床坐标系的刀轴矢量局部优化算法。
(2)对利用四元数插值法得到的初始刀轴矢量进行预处理,将超限区域的判定过程转化为对二次规划问题的求解。
(3)对叶轮叶片的加工仿真实例表明,利用所提出的超限区域判定算法及局部刀轴矢量优化算法能够实现对刀轴矢量局部调整的目标,提高机床运动学性能,从而实现更好的刀轴矢量光顺性。
猜你喜欢
经纬天地(2022年3期)2022-07-20 01:17:02
制造技术与机床(2019年12期)2020-01-06 03:18:26
制造技术与机床(2019年8期)2019-09-03 01:14:32
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
制造技术与机床(2017年2期)2017-05-04 04:17:37
船舶标准化工程师(2017年2期)2017-04-05 08:42:56
光学精密工程(2016年4期)2016-11-07 09:04:52
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48
计算机工程(2015年4期)2015-07-05 08:27:42
