
一种绳牵引并联机器人的时变势能场建模方法研究
2022-09-15 09:14韦慧玲罗陆锋卢清华陈为林
机床与液压 2022年11期
韦慧玲,罗陆锋,卢清华,陈为林
(佛山科学技术学院机电工程与自动化学院,广东佛山 528225)
0 前言
绳牵引并联机器人是一类利用柔性绳索替代刚性连杆,以绳索为驱动介质牵引末端执行器在工作空间内运动的并联结构机器人,是一类特殊的并联机器人。它主要由绳索、末端执行器、电机、滑轮以及点状铰链组成,如图1所示。
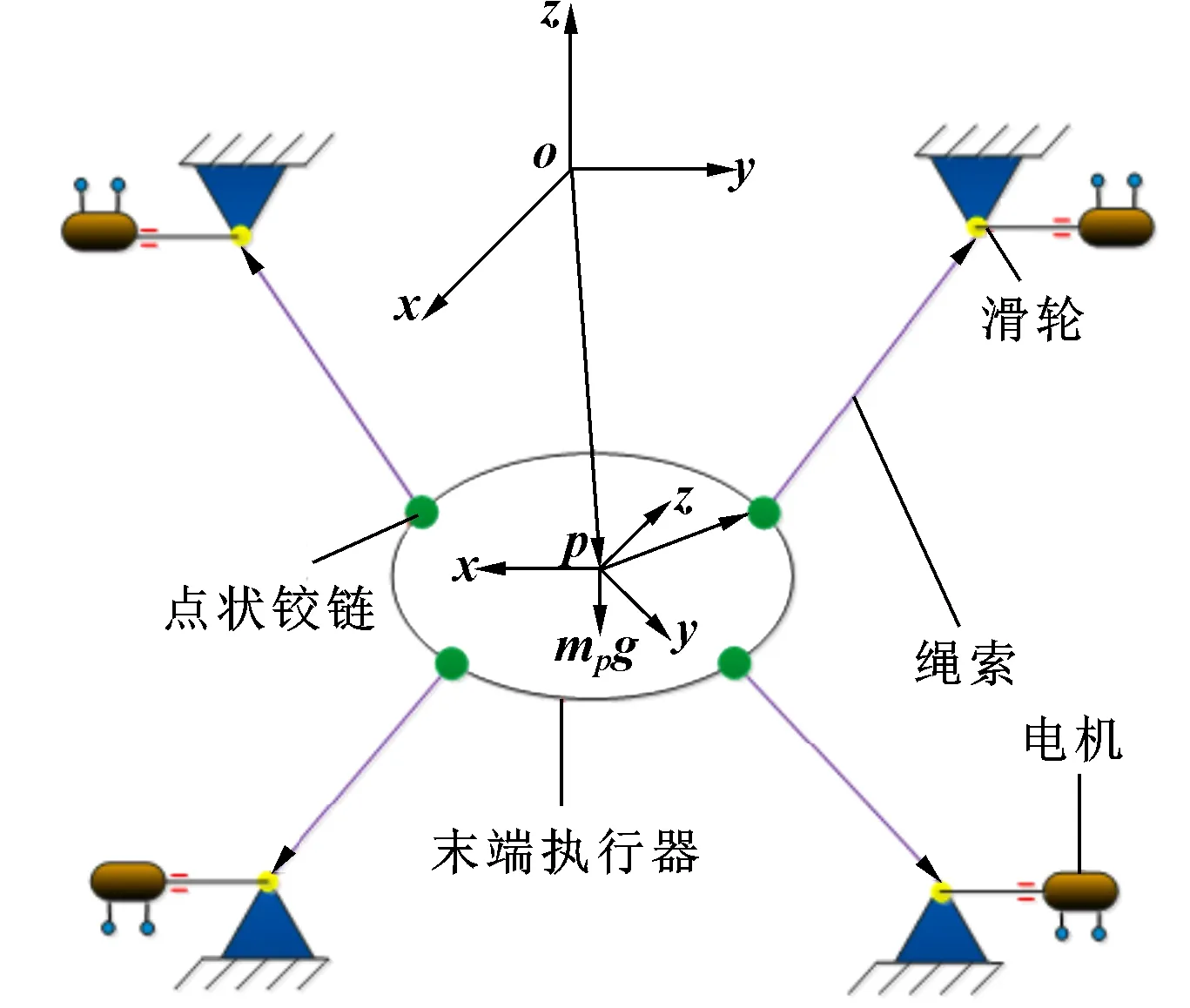
图1 绳牵引并联机器人结构示意
相对于传统的刚性连杆并联机器人,绳牵引并联机器人具有结构简单、操作灵巧、质量轻、工作空间大、运动速度快、运动链惯性小、干涉发生概率小、累计误差小以及可拆装重组等优点。绳牵引并联机器人由于具有以上显著的优点,从20世纪80年代诞生起,在多个领域中得到了广泛应用,如风洞试验、3D打印、高速摄像、外科手术、患者康复、大型物料搬运装配以及500 m大型射电望远镜馈源绳索支撑系统等。
绳牵引并联机器人中绳索势能跟绳索质量分布密切相关,而绳索质量分布取决于绳索长度。当绳牵引并联机器人的几何跨度达到百米以上时,由于绳索的柔弹性,绳索在自重或工作载荷作用下会产生明显下垂,此时绳索长度就不等于弦长,而是等于悬链线弧长。绳索非线性悬链线模型是考虑绳索下垂能够真实反映出绳索特性的模型,可以真实反映绳索特点,保证模型的精度。目前,在绳牵引并联机器人非线性悬链线模型超越方程的解算中涉及索力计算。由于绳索只能承受拉力不能承受压力,必须对索力进行优化,保证所有绳索张力都大于零。而索力优化问题大多数采用迭代算法,存在计算量大、计算困难等问题,难以满足高速高精度实时计算的要求。因此,采用传统方法解算大跨度绳牵引并联机器人的绳索时变势能场十分困难。而本文作者在前期工作中已经解决了大跨度绳牵引并联机器人非线性悬链线模型的降维优化实时解算问题,能够为实时势能场的解算提供参考。
本文作者提出的时变势能场模型是基于绳索非线性悬链线模型实时高精度解析解建立起来的明确势能场与时变索长、绳索端点坐标的实时数学模型,不需要进行索力迭代优化计算,具有实时性强、精度高、计算量少等优点。因此,基于时变势能场的方法有望建立起可靠量化的大跨度绳牵引并联机器人高速高精度稳定运动实时稳定性评价指标。目前对牵引并联机器人的稳定性研究大多数是静态稳定性研究,需要基于迭代优化的力旋量进行稳定性评价指标的建立和稳定工作空间的确定,难以满足大跨度绳牵引并联机器人高速高精度稳定运动实时稳定性评价指标的要求。因此,建立绳索时变势能场模型并明确其演化规律,能更好地促进大跨度绳牵引并联机器人的稳定性分析。
针对绳牵引并联机器人的时变势能场建模解算和性能分析问题展开研究。首先,在绳索质量微分单元和绳索长度微分单元的基础上建立绳索牵引并联机器人的微分势能场模型;再基于有限元积分法得到绳索牵引并联机器人势能场模型的积分表达式;进一步,通过绳牵引并联机器人悬链线模型高精度实时解析解和边界约束条件,对绳索牵引并联机器人势能场模型进行实时解算,实现绳索牵引并联机器人势能场模型的实时解算;最后,通过仿真举例试验对时变势能场模型的影响因素进行深入探讨,仿真结果表明势能场模型解算的合理性和有效性。
1 势能场模型的建立
在对绳牵引并联机器人的绳索时变势能场建模前,本文作者作了以下假设:绳索弹性势能忽略不计,因为在经典的绳牵引并联机器人应用中,绳索弹性变形都小于0.5%,其弹性可以忽略不计;对大跨度绳牵引并联机器人的绳索采用了主动阻尼振动控制技术,可忽略绳索振动对时变势能场的影响。
通过绳索质量微分单元和绳索长度微分单元建立绳索牵引并联机器人的微分势能场模型:

(1)
式中:为势能场;为重力加速度;为绳索质量;为绳索上任意一点的横坐标;为绳索上任意一点的纵坐标。
通过有限元积分法建立绳牵引并联机器人势能场模型的积分表达式:

(2)
式中:为绳索端点的横坐标;为绳索端点的横坐标;为绳索密度。
为了解算势能场的积分表达式,需要建立绳索悬链线模型和边界约束条件。建立绳牵引并联机器人悬链线模型如下:

(3)
式中:、、为系数。
建立绳牵引并联机器人的索长约束条件:

(4)
端点坐标约束条件:

(5)
端点坐标约束条件:

(6)
把悬链线模型和3个边界约束条件代入势能场模型的积分表达式,通过求解积分得到势能场模型:


(7)
2 模型系数的确定
为公式更加简单易读,令方程中的系数=、=和=,则公式(3)可整理为

(8)
公式(4)可整理为


(9)
公式(5)可整理为

(10)
公式(6)可整理为

(11)




(12)
整理公式(10)和(11)得到:



(13)
整理公式(12)和(13),分别得到系数方程:
(14)
(15)
构建式(14)和(15)的系数矩阵如下:
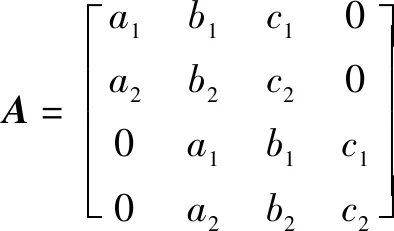
(16)
为使公式(12)和(13)同时成立,则系数矩阵行列式为0,即有:




(17)
根据公式(17),参考文献[14]中的悬链线模型解算方法可求解出势能场模型系数、和如下:
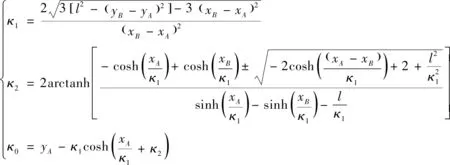
(18)
3 势能场模型的性能分析
3.1 势能场与坐标的关系
为更好地分析势能场的性能,首先展示绳牵引并联机器人的绳索悬链线形状展示,如图2所示。一根长度为的柔性绳索固定在两个端点上,以表示的全局固定参考坐标系附加在绳牵引并联机器人的基座上,其中为原点。 绳索(1,2,,)与滑轮相切的点被假定固定在基座上。此外,第根绳索在末端执行器平台上的点处固定,并且假定该固定点相对于末端执行器移动平台是固定的。第根绳索连接点和,假设这是一条悬链线,其长度用表示。接触点和为点状铰接点。为重力加速度。
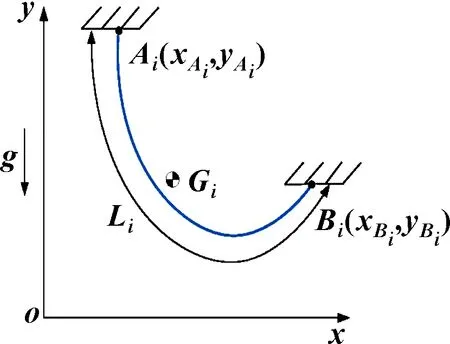
图2 绳牵引并联机器人绳索悬链线示意
为探讨势能与绳索端点坐标的关系,在平面上跟踪势能分布。假设==0 m,=9.81 m/s,=1 N/m,=10 m,根据式(7)计算得到势能=-28.200 286 45 kg·m/s。 同时,可以绘制出不同势能、和之间的关系如图3所示。可以看出:势能在平面内的分布关于平面对称。 另一个特征是相同数值的势能沿相同的曲线分布。 同时,在平面内,势能轮廓线趋势为下面势能线的绝对值比上面势能线的大。
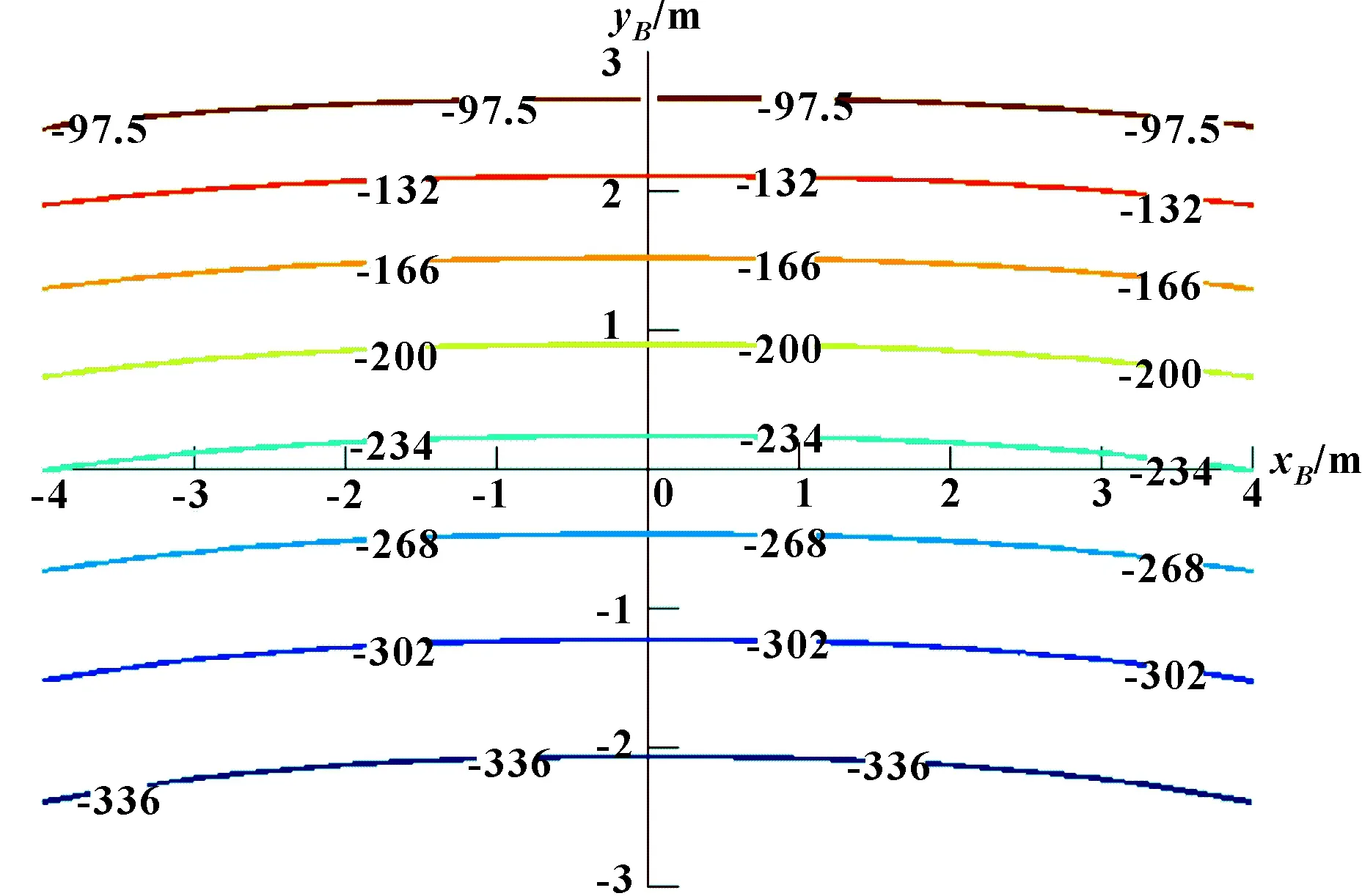
图3 势能在xByB平面内的分布(势能单位为kg·m2/s2)
当==0 m,=9.81 m/s,=1 N/m,=10 m,=1 m时,绳牵引并联机器人绳索的势能与端点的横坐标之间的关系如图4所示。可以看出:势能关于轴对称分布。端点的横坐标绝对值越大,势能的取值就越大,说明绳索越长其势能越大,跟绳索悬链线分布吻合。
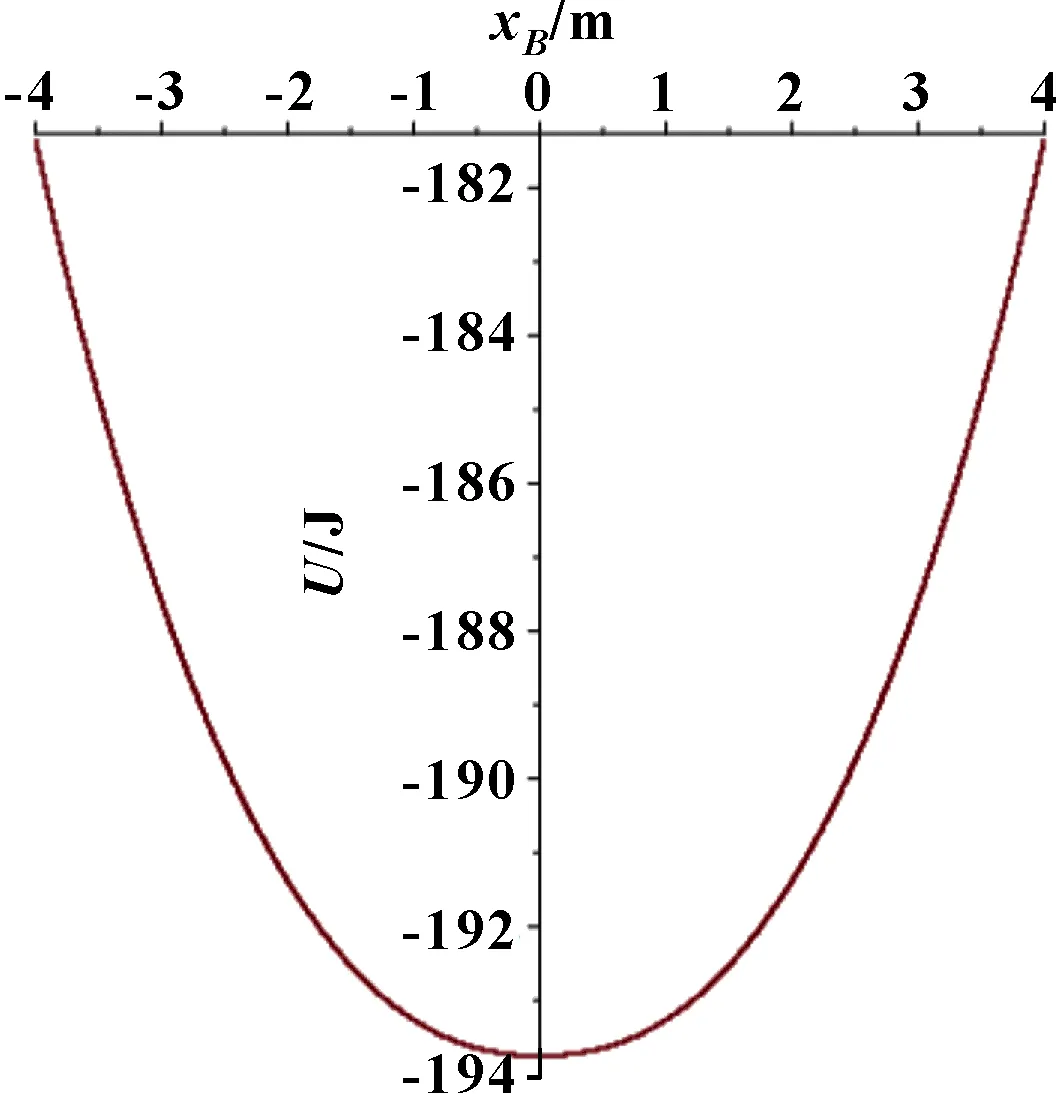
图4 末端执行器势能U与端点坐标xB的关系
3.2 势能场与绳索长的关系

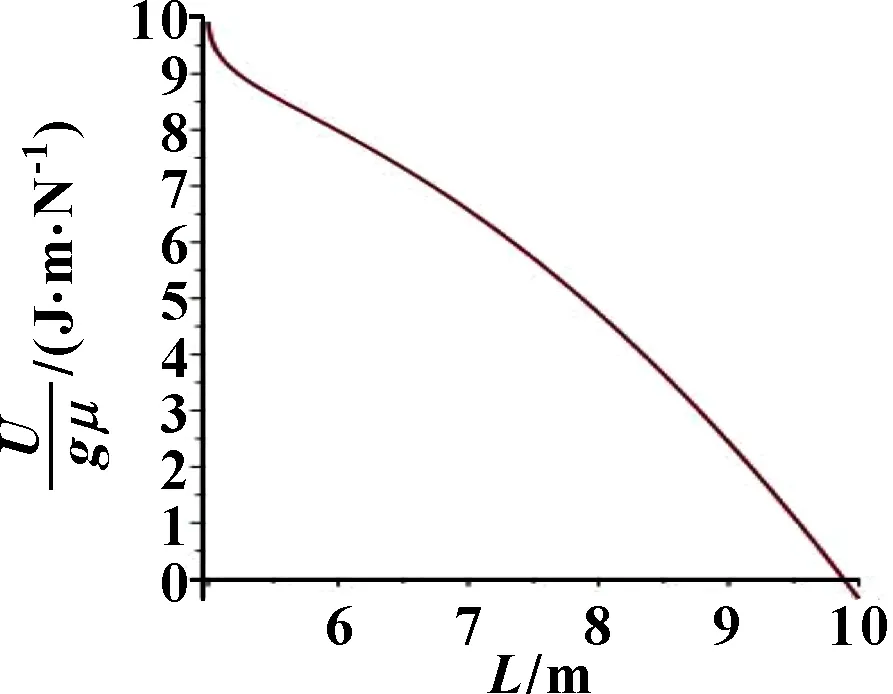
图5 末端执行器与索长L的关系
3.3 重心坐标实例验证
根据以上分析可知绳牵引并联机器人末端执行器重心的坐标表达式为
(19)
根据文献[14]中的系数关系可知,当=1 m、=4 m时有=-2.633 607 826、= 1.275 542 458、=-3.738 162 224。将这些数值代入式(7)中得到的总势能=-28.200 286 45 kg·m/s,重心的坐标为=-0.479 107 822 8 m。 为验证绳牵引并联机器人末端执行器重心的坐标表达式的正确性,使用另一种方法测试重心的坐标。
(20)
通过上式计算获得的重心′=-0.479 107 838 5 m。比较=-0.479 107 822 8和′=-0.479 107 838 5 m,可知两种方法计算出的势能值误差为3.27×10,在可接受范围内,验证了势能场模型是正确合理的。
4 结论
针对绳牵引并联机器人势能场的建模、模型参数求解和性能分析三大问题,本文作者给出了一套完整的计算分析方法。根据绳牵引并联机器人的结构特点建立了时变势能场模型。利用悬链线模型高精度实时解析解求出了时变势能场模型的参数,实现了势能场模型的解算。通过仿真验证了势能场模型的有效性和解算的正确性。研究结果为基于时变势能场的稳定性评价、稳定工作空间的标定提供了参考。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
科技风(2021年10期)2021-04-18
语数外学习·高中版中旬(2020年8期)2020-09-10
中学生数理化·教与学(2019年8期)2019-09-18
科学导报·科学工程与电力(2019年44期)2019-09-10
数学大王·中高年级(2018年7期)2018-08-29
高中生学习·高三版(2017年9期)2017-10-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
新高考·高一物理(2015年3期)2015-08-20
新高考·高一物理(2014年4期)2014-09-17
