
无人机巡检系统自主导航定位技术研究
2022-09-14 03:00赵国欣
江西电力 2022年7期
李 杰,赵国欣
(黄河水利职业技术学院,河南 开封 475004)
0 引言
小型旋翼无人机常用的导航方式是基于GPS/INS 的组合模式,该模式需要通过采集GPS 信号,才可以达到稳定飞行的状态,但现实复杂的环境并不能保证这一点。如在信号阻隔区GPS 接收机可能无法正常接收信号,系统无法长期实现INS惯性导航的功能,难以准确定位,使得无人机出现航线错误甚至炸机的风险[1-3]。
1)精细滤波算法
精细滤波算法是指针对不同传感器,加速度计、陀螺仪、磁场计以及气压计单独采用一套底层的滤波算法,从而在不增加传感器成本的基础上提高导航精度。
2)高效融合算法
目前使用最为广泛的是卡尔曼滤波算法,为了提高算法的效率,需根据实际情况,对卡尔曼滤波器进行设计与改进,以达到降低卡尔曼滤波器维数并不损失精度的效果。
3)神经网络技术
通过设置INS 误差分析数据,可以有效解决GPS信号暂时没有状态下,无人机航线的判断。当无人机可以再次采集GPS 信号时,依据神经网络技术,能够通过GPS 和INS 采集的数据,实现深度学习的目的,从而不断优化神经网络技术。如果无人机的GPS 信号再次消失的状态下,便能够依据这种技术分析惯导的位置,从而得到准确的INS 位置,使得无人机的GPS/INS 组合模式进一步改善。最终当无人机在特殊环境下进行作业时,当GPS 信号正常时,系统采用常规的组合导航方式进行导航;当在信号阻隔区GPS信号丢失时,系统采用神经网络预测的方式,根据惯导信号来预测无人机自身的位置信息,从而指导无人机沿预定的路线飞行;当作业完毕要返回出发点时,导航模块利用神经网络对之前飞过路线的记忆功能,输出无人机返回时自身的位置坐标信息,进而指导无人机安全返航。
4)分层调度思想
整个系统的设计分为三层,第一层为底层传感器滤波层,用于提高传感器精度且不相互污染;第二层为数据融合层,提高导航整体精度;第三层为算法调度层,实现智能化导航。在GPS 信号缺失时,算法调度层能够迅速识别,并且调用加神经网络修正的导航算法,在GPS信号恢复时又能重新使用GPS导航。
5)分级滤波思想
在有稳定GPS 的情况下,小型旋翼无人机的导航精度能够满足要求,因而在做多传感器组合导航时不需要牺牲计算资源和鲁棒性来略微提升导航精度。基于这种对导航模块性能的要求,选用分级滤波构架。即底层采用分散式的滤波,顶层有选择地采用融合算法。采用分级滤波,可以在部分传感器失效的情况下,仍可以充分发挥有效传感的功能,保证导航在一段时间内正常进行。在传统的飞控导航模块中,只要GPS 失效就会自动降落,并没有充分利用其它传感器的功能。
1 基本原理
传统的小型旋翼无人机通常采用多传感器组合导航的方式,典型的传感器组合方式如图1所示。基于GPS/INS 组合导航所用到的传感器有GPS 和惯性导航元器件(陀螺仪、加速度计和磁力计),GPS 传感器可以输出载体在导航坐标系下的速度和经纬度信息,惯性导航传感器可以输出载体的加速度信息和角速度信息。由于在高度通道GPS 非常不稳定,所以辅以气压计来提高高度通道的导航精度。然而传统的组合导航方式,属于集中式滤波,当GPS 信号不能正常提供,而使得导航被迫中止[4-6]。

图1 典型传感器组合方式
通过多传感器精细滤波算法以及高效融合算法提高导航系统精度,通过神经网络等智能化工具以及复杂系统分层调度思想从而实现导航系统智能化,通过分级滤波构架,提高系统的鲁棒性,如图2 所示。系统初始化包括系统初始对准与传感器的自修复。在传感器的修复过程中,最为重要的是进行加速度计和陀螺仪的标定以及磁场计的修复。
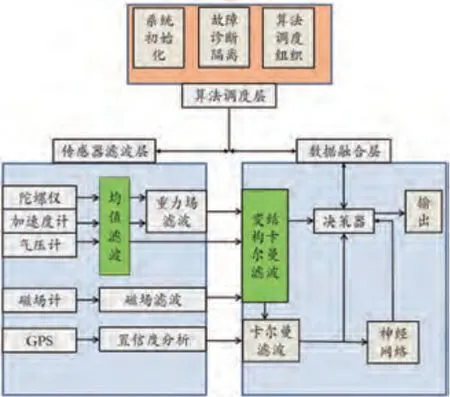
图2 导航构架
通常依据重力场技术对加速度计实现静态的判断,一般选择的判断技术有三种,分别为6 位置判断技术、12 位置判断技术与24 位置判断技术。文中选择6 位置判断技术,实现无人机加速度计三个轴的确定性误差判断,建立的模型如下:
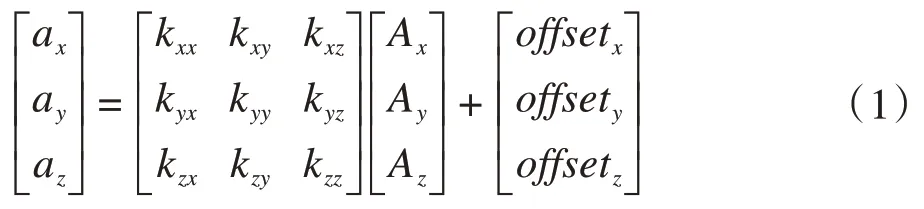
式中:ax、ay、az依次为无人机加速度计三个轴的实际输出值;kii是无人机加速度计的标度值;Ax、Ay、Az依次为无人机三个轴加速度计不含确定性误差后的值;kij是无人机加速度计的非正交误差值;offseti是无人机加速度计的零位偏置。
电子罗盘的功能为采集地球磁场信息,分析北极的位置。一般地球的磁场信号很小,如果电子罗盘受到周围信号的影响,无法获得相关信息。通过对电子罗盘采集的信息修复,从而优化采集信息,一般采用平面修复技术,如图3所示。
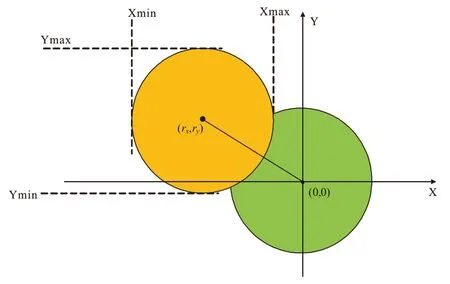
图3 平面修复法
GPS 传感器输出的速度位置信息与惯性导航传感器解算出来的速度位置信息作为卡尔曼滤波器的输入,输出惯性导航的误差信息,用此误差信息修正惯性导航的数据,最终产生无人机飞行需要的导航信息,如图4 所示。当GPS 信号中断时,组合导航无法工作。此时设计了神经网络对GPS 位置和速度信号进行预测。其工作原理为:如图4(a)所示,在GPS 信号正常时,设计ANN 神经网络以惯性导航传感器输出的速度和姿态信息为输入,以Kalman 滤波器的输出为期望输出对ANN 神经网络进行训练;如图4(b)所示,当GPS 信号中断时,利用训练好的神经网络来间接代替GPS 的作用,对kalman 滤波器的输出进行预测,预测产生惯性导航的修正信号并补偿惯导信号,在没有GPS 信号的情况下,系统依旧可以输出无人机自身的位置信息。
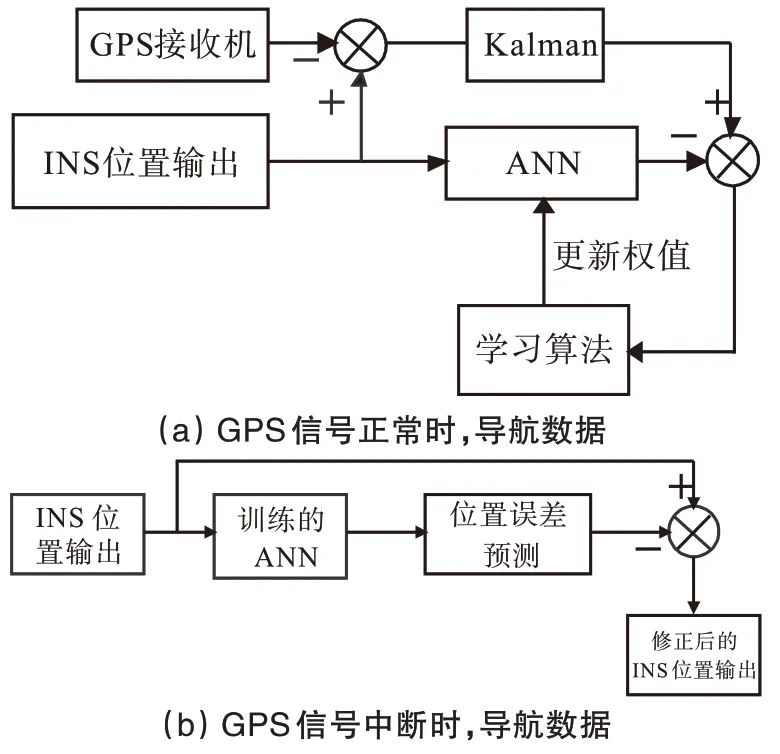
图4 神经网络架构图
由欧拉角微分方程可知欧拉角的变化率与偏航角无关,也就是说即便偏航角不准确,也不会影响俯仰角和滚转角的计算。因此可以在不融合磁力计数据的情况下,就可以使用重力场滤波,而且能够保证滤波系统是稳定的。如公式(2)所示,其中,P&、R&和Y&为角速度在导航坐标系下的投影,ωnbx、ωnby和ωnbz为角速度在载体坐标系下的投影,也就是陀螺仪数据。
因此,设计重力场滤波框架(如图5),保证系统的俯仰角和滚转角收敛。在此,也特别说明在直接使用四元数方法计算姿态微分方程时,仍可以在不考虑磁力计的情况下做重力场滤波。依据是如下定理:使用四元数描述姿态时,偏航角误差不会传递到俯仰角和滚转角中。
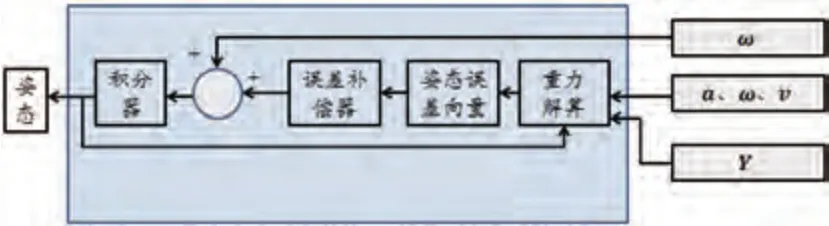
图5 重力场滤波
2 硬件方案设计
硬件部分包括对旋翼机导航系统硬件模块的选型和调试。GPS/INS 导航系统的硬件模块选用InvenSense公司的MPU9250九轴运动跟踪传感器(陀螺仪+加速度计+磁力计)作为惯性导航数据源,选用Ublox 公司的外置GPS 模块作为卫星导航的数据源。陀螺仪用于实时解算飞机飞行过程中的姿态和加速度;GPS用于检测飞机的速度、位置坐标等信息。中央处理模块选用ST公司的STM32F103处理单元,对这些传感器的接口特性进行研究,并且完成了与中央处理器硬件接口的设计和连接。完成硬件系统的连接,确保硬件系统能正常运行[7-9]。惯导传感器部分采用MPU9250复合芯片(MCM),基于CMOS-MEMS设计技术,通过3×3×1 mm的芯片,使得传感器具有更高的性能的前提下,成本最小,同时,该芯片在受到较大震动冲击的情况下,保持性能稳定,其原理图如图6所示。

图6 MPU9250原理图
文中设计的无人机卫星导航传感器选择Ublox GPS,这种模式可以获得多种导航数据,包括GPS、GLONASS或BeiDou,从而保证了无人机导航定位的准确性。但单独使用北斗导航系统时,其本身只能二维定位,定位精度不高,适用于区域导航,故一般使用组合导航获得更好的导航效果。此平台专门适用于即使在GPS信号差的环境下都需要最高的可用性和准确性的高性能应用。其原理图如图7所示。
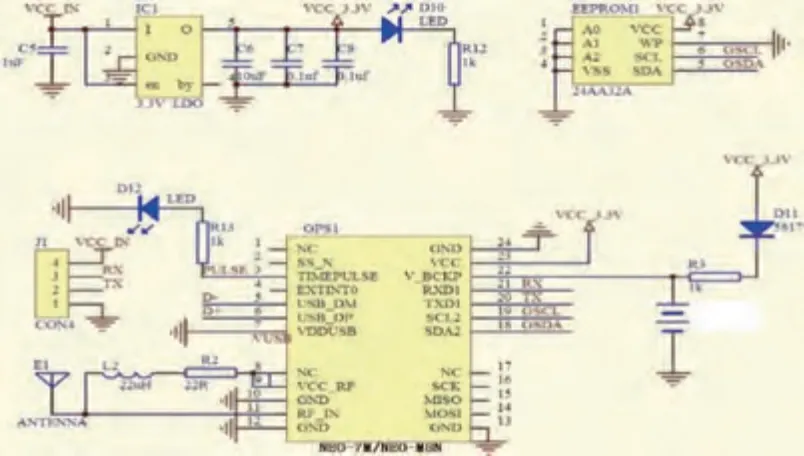
图7 Ublox M8N电路图
当无人机的GPS 信号无法采集时,通过选择高精度的气压计,获得无人机的飞行高度数据。文中通过设置独立的数据处理模块,优化了系统算法,明显改善了气压计的工作性能。选用气压计DPS310+集成解算单片机STM32F0,如图8所示。
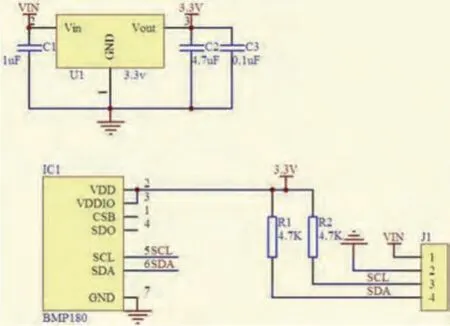
图8 气压计模块实物及原理图
文中设计的数据处理模块,还可以分析惯性导航和卫星导航传感器采集的数据,利用kalman等融合算法对信号进行融合,输出满足飞行要求的导航定位信息。本系统所选用的是STM32F767与STM32F103芯片联合处理。其中STM32F767为主控高性能芯片,负责整个系统的全局控制。STM32F103为从机,主要用于处理稳定性不高,且不能自由控制收发的传感器。
为了能够实时监测导航模块的导航精度,在设计模块时还引入了数据传输模块。模块的通讯示意图如图9所示。
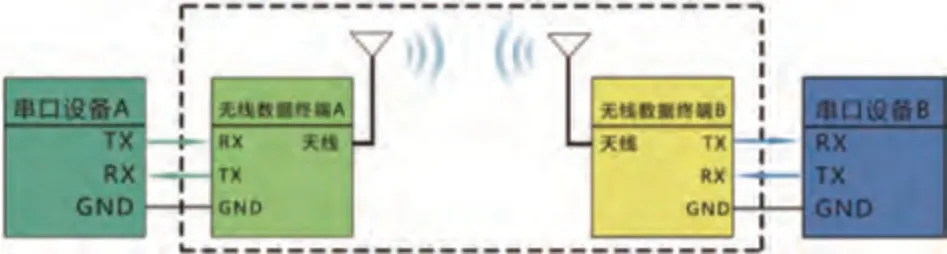
图9 数传通讯示意图
3 算法设计
1)四元数法
四元数法在姿态解算过程中运用十分广泛,不仅计算量小,而且算法的稳定性高。四元数基本方程:

式中:u表示单位化后的旋转轴矢量;θ表示绕该轴旋转的角度。这里都是四元数用来表示旋转,因而所定义的四元数模为1。写成四元数的形式:

式中:cosα,cosβ,cosγ为u的方向余弦;四元数的共轭:由于旋转操作对应的四元数模为1,所以文中四元数的逆等于其共轭,即用四元数表示导航坐标系到载体坐标系的旋转变换,首先将坐标表示法扩充为四元数的形式如下:

则从导航坐标系到载体坐标系的旋转可以表示成如下的关系:

写成矩阵形式为:
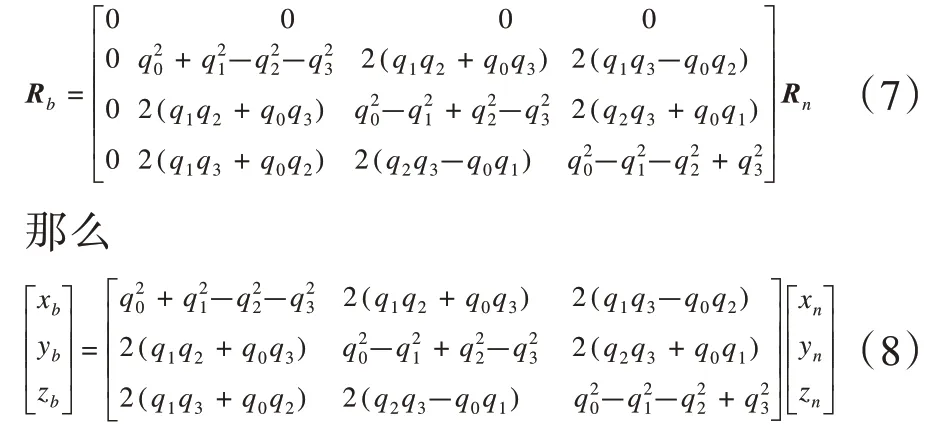
因而四元数法利用四个参数q0,q1,q2,q3实现了从导航坐标系到载体坐标系的变换[10-12]。
2)卡尔曼滤波
文中采用Kalman滤波计算流程如图10所示,一共含有两个模块,分别是滤波分析单元与增益分析单元。
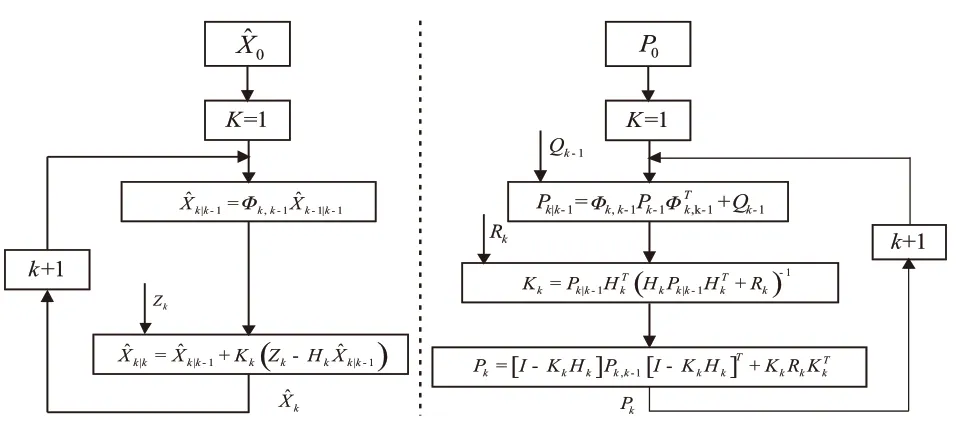
图10 Kalman滤波计算流程
为了便于在计算机上实现,离散化后的状态方程和观测方程可以表示为[13-15]:

3)Elman神经网络
通过测试发现Elman神经网络不仅算法简单,而且具备记忆功能,所以本系统的设计选用Elman神经网络,其结构图如图11所示。

图11 Elman滤波计算流程
Elman 神经网络技术类似BP 神经网络技术,含有两个运行模式,依次是工作信号的正向运行模式与误差反向运行模式。依照Elman神经网络技术,通过采集的全部数据信息分析,如果这些信息符合系统要求,那么可以准确实现无人机导航定位,同时,还能够实现神经网络技术的分析。图12 所示为Elman 神经网络训练和预测的流程图。
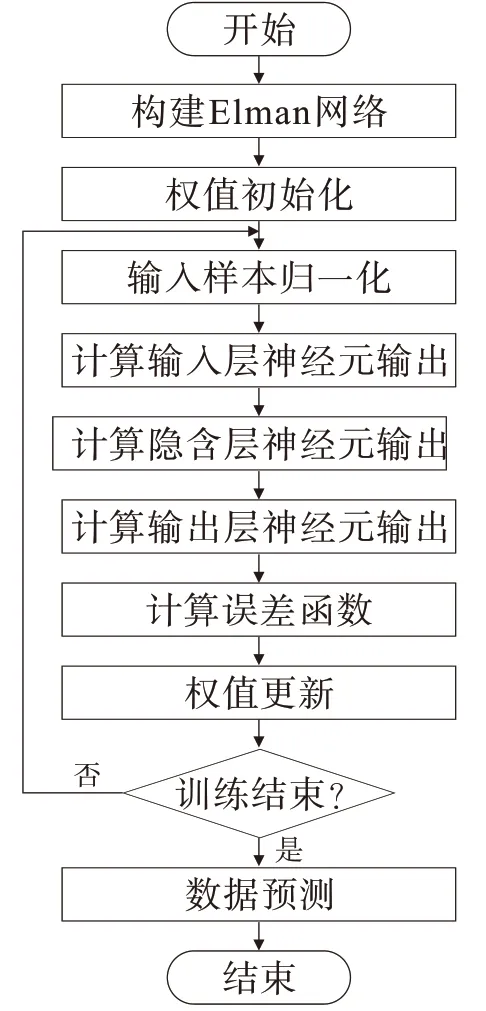
图12 Elman神经网络训练和预测流程图
依照无人机自主导航定位的要求,设置Elman神经网络技术模型,含有各个神经元的信息,实现神经元传递函数的目标。然后设置每层的连接权值,通常设置的连接权值很小。由于系统采集的样本信息存在一定的差异,导致系统输入输出值难以处理,因此,系统对于采集信息实现归一化分析。接着,系统依据这些信息,优化算法,不断改善系统各层的权值。因此,系统可以解决无人机导航定位中存在的问题,进行准确预测。
4 系统设计
小型旋翼无人机巡检数据监测平台程序基于LabVIEW 编写,包括用户登录模块、数据收发模块、状态信息显示模块、信号处理和分析模块、数据存储和历史查询模块,监测平台具有较快的数据收发响应时间、较强的数据处理能力、良好的用户操作界面以及较完善的数据库存储查询机制。
为了保护小型旋翼无人机巡检的信息安全,方便巡检人员的日常管理工作,为各种监控软件设计可靠的用户登录和管理程序是必不可少的。本设计的LabVIEW 上位机监测系统登录界面如图13 所示,当输入的用户信息与用户信息库中的对应项匹配时就可以进入小型旋翼无人机巡检数据监测系统主界面。

图13 小型旋翼无人机监测平台用户登录界面
5 结语
当无人机处于信号阻隔区时,GPS接收机可能无法正常接收信号,系统无法长期实现INS惯性导航的功能,难以准确定位。文中设计的无人机卫星导航传感器选择Ublox GPS,可以获得多种导航数据,包括GPS、GLONASS 或 BeiDou,从而保证了无人机导航定位的准确性;设计的数据处理模块,可以分析惯性导航和卫星导航传感器采集的数据,利用kalman 等融合算法对信号进行融合,输出满足飞行要求的导航定位信息。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年10期)2022-06-17
空间电子技术(2021年4期)2021-11-10
军民两用技术与产品(2021年7期)2021-10-13
科学与财富(2021年33期)2021-05-10
导航与控制(2020年3期)2020-09-09
导航与控制(2019年4期)2019-09-25
电子制作(2019年9期)2019-05-30
电子制作(2018年16期)2018-09-26
导航与控制(2017年6期)2017-12-20
