S模式二次雷达虚假目标处理方法研究
2022-09-14 02:30车卫龙
中国新技术新产品 2022年11期
车卫龙
(民航江苏空管分局,江苏 南京 210013)
0 引言
二次雷达是空中交通管制系统的重要组成部分,也是目前空中交通管制提高空域容量、缩小管制间隔的最重要手段。由于传统的二次雷达A/C模式限制了空域流量的进一步增长,因此出现了S模式二次雷达系统,S模式二次雷达通过1090ES数据链来实现地面雷达与空中飞机进行数据通信的功能,地面雷达站和空中目标通过Comm-A和Comm-B进行通信,可获取航班号、空速、航向、上升率、下降率以及飞行员意图信息等数据。法国Thales、西班牙Indra等国外厂家在中国部署的最新型号二次雷达都具备了增强型S模式能力,恩瑞特、四创电子等国内厂家的增强型S模式能力也达到了国际先进水平。在二次雷达S模式快速发展和推广应用的过程中,也出现了一些兼容性问题,例如应答机对S模式询问的支持能力。有的飞机仅支持AC模式询问,因此对这一类飞机要在保证S模式询问的基础上,采用IAS/ICS询问,以保证仅支持AC模式询问的飞机的获取。
1 二次雷达目标询问原理
二次雷达的目标询问模式分为传统A/C模式与S模式,传统A/C模式使用全呼模式(All Call)监视空域中装备了A/C模式应答机的飞机,S模式同时使用全呼模式(All Call)和选呼模式(Roll Call)监视空域中装备了S模式应答机的飞机。为了防止S模式二次雷达无法监视装备A/C模式应答机的飞机,S模式二次雷达一般使用过渡询问模式(UF11+IAS/ICS)进行目标询问,同时监视装备了A/C模式应答机和S模式应答机的飞机。
S模式二次雷达一般使用全呼询问捕获目标,再使用选呼询问对捕获目标进行跟踪,具体的询问脉冲可以根据实际需要进行灵活编码,既可以完成目标监视任务,又可以获取更丰富的目标信息。但是,如果询问脉冲编码不合理,则可能出现二次雷达系统工作异常的问题,甚至出现虚假目标,该文所述现象就是因S模式全呼询问不合理而导致的。
1.1 A/C模式询问
根据国际民航组织标准(ICAO),传统空管二次雷达共有6种询问模式,分别称为1、2、3/A、B、C以及D模式。其中,1、2模式专用于军用识别询问,3/A(常简称A模式)模式兼用于军用识别和民用识别询问,B模式只用于民用识别,C模式用于高度询问,而D模式作为备用模式。这6种模式由时间间隔不同的脉冲对组成,在二次雷达设备实际工作中,主要使用3/A、C询问模式,简称A/C模式。
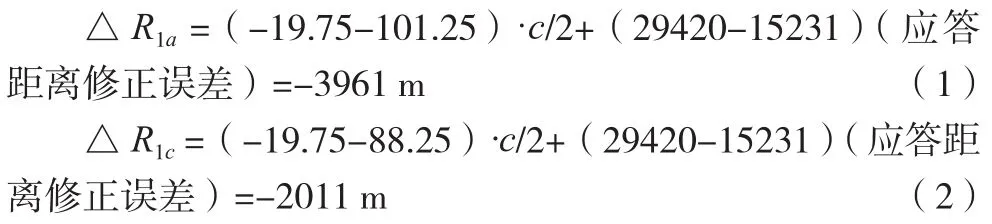
二次雷达A/C模式的询问脉冲如图1所示,A模式询问脉冲为 8.00 μs,C 模式的询问脉冲为 21.00 μs。

图1 A/C模式询问脉冲
1.2 S模式UF11全呼询问
S模式二次雷达的工作模式分为S模式全呼询问和S模式点名询问,S模式全呼询问包括仅S模式全呼询问和ACS兼容模式询问。其中,仅S模式全呼询问也称为UF11询问模式,只能询问S模式应答机,传统的A/C模式应答机无法应答;ACS兼容模式询问可以同时询问S模式应答机和A/C模式应答机。
S模式UF11的询问脉冲的持续时长为19.75 μs,其中P脉冲的持续时长为 2.00 μs,P脉冲的持续时长为 1.50 μs,P脉冲的持续时长为16.25 μs,如图2所示。

图2 S模式UF11询问脉冲
1.3 ACS(短 P4)询问
ACS兼容询问模式是一种兼容询问模式,可以同时询问S模式应答机与A/C模式应答机。在二次雷达系统由传统的A/C模式应答机向S模式应答机的过渡过程中,为了同时监视新旧2种类型的应答机,可以采用ACS询问模式。ACS询问模式具体又包括2种类型:ACS(短P)脉冲询问 和ACS(长P)脉冲询问,ACS(短P)模式与传统的A/C询问模式功能相同,仅询问A/C模式应答,而ACS(长P)模式可以同时询问S模式应答机和A/C模式应答机。
A模式短P的询问脉冲的持续时间为10.80 μs,C模式短P4的询问脉冲的持续时间为23.80 μs,如图3所示。
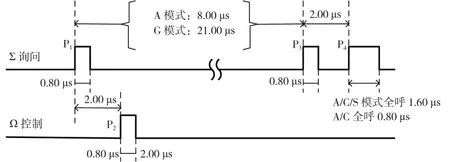
图3 IAS/ICS模式询问脉冲
2 二次雷达目标识别原理
机载应答机收到二次雷达发射的询问信号后,将根据询问模式自动地应答一串脉冲,这串脉冲称为应答信号。根据询问模式的不同,应答信号脉冲的编码也不同,如图4所示。A/C模式的应答脉冲的持续时间为20.30 μs,DF11的应答脉冲的持续时间为64.00 μs。

图4 应答信号
为了同时监视A/C模式应答机与S模式应答机,该文所述的二次雷达系统采用了S模式全呼询问与S模式点名询问交替的询问模式设计。其中,S模式全呼询问脉冲为UF11+ IAS/ICS,UF11的P后沿与IAS的P前沿的时间间隔是101.25 μs(内部处理延时),UF11的P后沿与ICS的P前沿的时间间隔是88.25 μs(内部处理延时)。
该文所述二次雷达系统采用的以上询问模式可以很好地完成空管监视任务,目标探测质量和性能也可以得到保障。在具体使用过程中,可以通过调整UF11询问信号中的应答概率()来控制S模式应答机的应答概率,在提高目标捕获效率的同时,降低间隔距离较近目标的相互干扰。当应答概率()提高到一定数值后,会出现大量A/C模式虚假目标,经过分析,判断其原因是由于多个S模式目标间隔距离较近,因此它们的S模式应答信号相互交织,被作为A/C应答信号解析而产生虚假目标,具体分析如下。
2.1 无虚假目标的情况
当目标S与S之间的距离间隔足够大时,它们的全呼应答脉冲无交织,不会出现A/C模式虚假目标。对临界状态来说,两者之间的距离间隔正好可以传输1个全呼应答脉冲,即 64.00 μs,则此时的最小距离间隔为=64μs/2=9600 m(为光速)目标与雷达之间的位置关系如图5所示。

图5 探测正常时的两目标信号时序
2.2 远距离目标全呼应答干扰
当目标S与S的距离间隔小于时,应答消息R的尾部与R的头部存在交织。如果R的头部没有被R交织,则R可以被解析出来,但是尾部数据错误,因此会导致CRC校验错误,无法被正常使用;R的头部被交织,无法识别,从而被当作AC脉冲进行解析,可能被解析出多个AC应答消息。
当R的头部被识别为AC应答时,与S相比,AC应答的距离多计算了UF11的询问脉冲时间(19.75+101.25/88.25) μs,则A应答距离与S的距离差为△,如公式(1)所示;C应答距离与S的距离差为△,如公式(2)所示。
当R的尾部被识别为AC应答时,与S相比,AC应答的距离多计算了UF11的询问脉冲时间(19.75+101.25/88.25+64-20.3) μs,则 A 应答距离 与 S的距离差为△ R,如公式(3)所示;C应答距离与S的距离差为△,如公式(4)所示。

目前,二次雷达信号处理对DF11的识别方法是根据DF11的前导脉冲(8.00 μs )和前 5 bit的 DF 数据(5.00 μs)进行判断的,因此为了保证R不被干扰,须保证R与R间隔距离不能小于。如公式(5)所示。
目标与雷达之间的位置关系如图6所示。

图6 探测异常时的两目标信号时序

2.3 近远距离目标全呼应答同时受到干扰
当R与R间隔距离小于时,R与R都无法解析,全部作为AC应答进行解析,可能识别为多个AC应答消息。
当R与R间隔距离等于时,R的头部被识别为AC应答,与S相比,则A应答距离与S的距离差为△,如公式(6)所示;C应答距离相比于S的距离差为△,如公式(7)所示(此时AC应答距离S最近)。

综上所述,产生AC虚假目标的原因是多个模式S目标距离间隔较小,导致全呼应答脉冲交织,出现S模式目标全呼应答被作为AC应答解析(近距离目标全呼应答交织暂不考虑)的现象,从而产生了AC虚假目标。
根据脉冲相对关系,虚假目标判断条件设置如下:1) 所有目标的方位处于3 dB波束内(即所有目标方位差小于4°)。2) 2个S目标的距离间隔为<9600 m≈10 km。3) AC点迹与远距离S目标的距离间隔-5911 m<<4544 m,设置fabs()<7 km(fabs为求绝对值运算符号)。4) AC 点迹与近距离S目标的距离间隔。(-3961 m+)<<(4514 m+),设置 fabs()<17 km。5) AC 点迹是虚假目标,S模式目标是真实目标。
3 现场有效性验证
实际选取正在运行的某DLD-100C型二次雷达站进行验证,该雷达距离跑道较近,周围环境复杂,威力覆盖范围内进场出现多个目标距离较近的情况,是理想的试验场所。
采用常规虚假目标处理方法的处理结果如图7所示。图7为2个真实目标A3753(距离为206.332 km,方位为155.632°,地址码为86D59C)和A5317(距离为212.076 km,方位为155.797°,地址码为4851B1),解码出虚假目标A0736,无地址码,说明是A/C模式虚假目标。

图7 常规虚假目标处理方法
采用改进的虚假目标处理方法处理结果如图8所示。图8为2个真实目标A1631(距离为256.871 km,方位为241.293°,地址码为70E069)和A0744(距离为253.507 km,方位为240.628°,地址码为4D0110),未解码出虚假目标。

图8 改进的虚假目标处理方法
4 结语
随着国内空中交通监视技术的发展,S模式技术作为新一代监视技术受到越来越多的重视。受历史原因的影响,早期有一些应答机的能力参差不齐,这些老式的应答机要求雷达厂家在处理S模式信号时,需要兼顾以前老式应答机,包括询问格式的编排以及应答信号字段信息的判别等方面。该文根据S模式二次雷达的工作原理,主要是二次雷达询问脉冲与应答脉冲有关技术,对S模式二次雷达在实际使用过程中出现的虚假目标问题进行合理分析,并提出了有效的解决方法。通过实际验证,该方法可有效抑制虚假目标的产生,并提高空管运行的效率。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
航天器工程(2021年2期)2021-04-28
数学小灵通(1-2年级)(2020年11期)2020-12-28
小学生学习指导(低年级)(2019年3期)2019-04-22
百科探秘·航空航天(2018年11期)2018-11-29
中成药(2017年12期)2018-01-19
电子制作(2017年23期)2017-02-02
遥测遥控(2015年5期)2015-04-23
读写算·小学低年级(2014年4期)2014-07-24
湖北大学学报(自然科学版)(2011年4期)2011-03-20