具有死区效应的光伏逆变系统积分滑模控制
2022-09-09 07:05:14许星露贾旭楠安生才李兴韫
上海电力大学学报 2022年4期
马 元, 许星露, 贾旭楠, 安生才, 李兴韫
(1.天津科技大学, 天津 300222; 2.国网青海省电力公司, 青海 果洛 814000)
光伏发电在新能源发电领域的占比越来越大,因此光伏发电系统的核心设备——并网逆变器及其对电网质量的影响得到了广泛研究。三相光伏并网逆变器的控制目标是快速动态响应、零稳态误差、强鲁棒性和低谐波失真。为实现上述控制目标,国内外学者提出了很多逆变器控制策略,如比例积分控制、重复控制等,有效提高了逆变器的输出效果[1-2]。
文献[3]通过分析三相逆变器输出电压的谐波失真,建立了逆变器数学模型,提出了一种离散积分滑模控制,以补偿系统的非线性。为了减小参数不确定和负载扰动的影响,文献[4]设计了降阶扩张状态观测器以实时估计系统的总扰动,同时设计改进型重复控制器实现了系统的零稳态误差。文献[5-6]对逆变器死区效应进行了研究,尤其文献[6]通过对死区的机理研究,总结了死区对光伏并网逆变系统的不良影响。文献[7-11]主要针对逆变系统的外界干扰和参数不确定问题,改进了传统控制方法,引入神经网络或深度学习算法以实现自适应控制,从而实现输出跟踪期望。现有技术均在一定程度上提高了逆变器的输出能力,改善了电能质量。但是目前的研究工作中鲜有文献在建立逆变器数学模型时将死区效应考虑在内,且逆变器控制效果较差。
基于上述分析,本文提出了一种具有死区效应的光伏逆变系统积分滑模控制策略,在建立逆变器数学模型和设计控制器时考虑了死区效应。所设计的控制器不仅能够充分利用状态观测器对外界干扰、参数不确定性以及死区引起的干扰进行有效估计,而且通过非奇异终端滑模控制方法有效避免了传统方法的奇异缺陷,从而改善了逆变系统的性能,提高了并网电能质量。最后,通过动力系统仪器使用与测量(Power System Instrumentation and Measurement,PSIM)仿真验证了所提控制方法的有效性。
1 逆变器死区分析及建模
1.1 死区效应分析
在实际控制系统中,为防止逆变器上下桥臂同时导通,必须在开关器件的控制信号中注入一定的死区时间。此外,开关器件动作本身有一定的延迟,从而导致实际开关信号与理想信号之间存在一定的时间差。这一时间差称为逆变器死区。
A相桥臂电路示意如图1所示,其中指定电流的流出方向为正方向。图1中,Udc为逆变器直流侧电压,S1和S2为开关信号,D1和D2为反向二极管。在死区持续期间,S1和S2处于关闭状态。因此,A相电流iA的方向决定了D1和D2的开关状态。当iA<0时,电流流过D1,死区期间A相端电压为Udc。当iA>0时,电流流过D2,死区期间A相的端电压为零。很明显,在死区A相的端电压不受开关装置的影响,而是取决于相电流的方向。
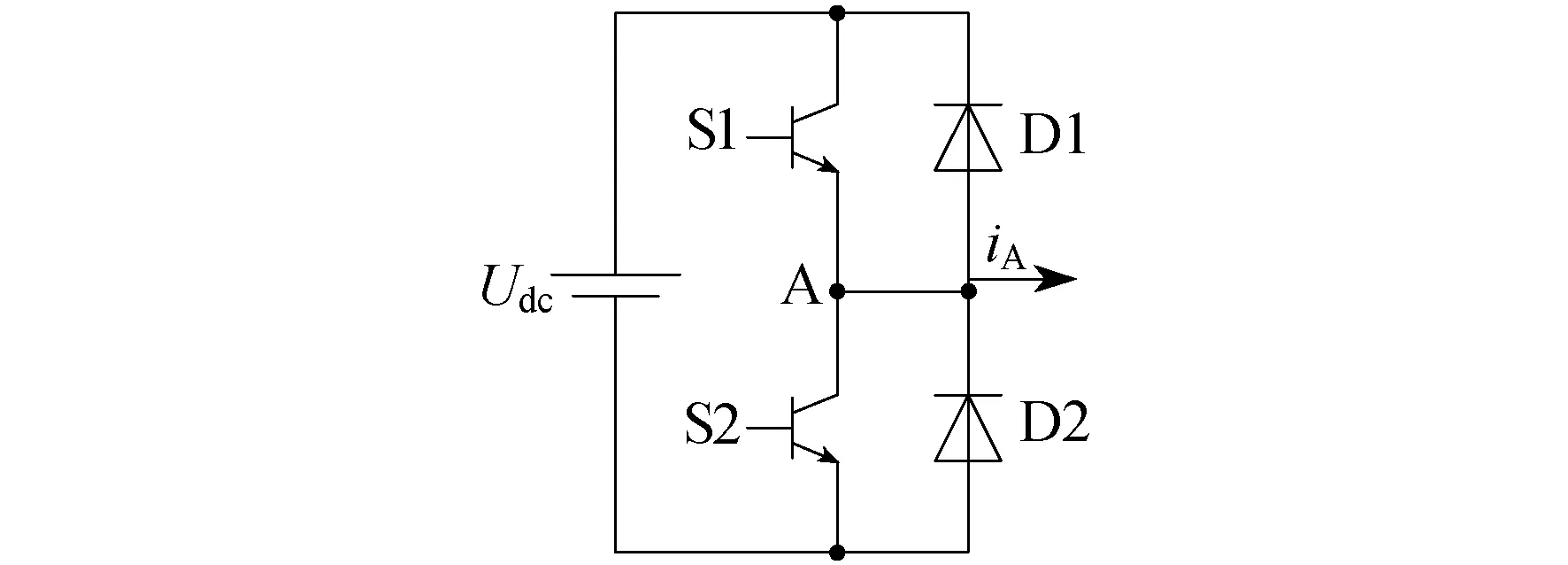
图1 A相桥臂电路示意

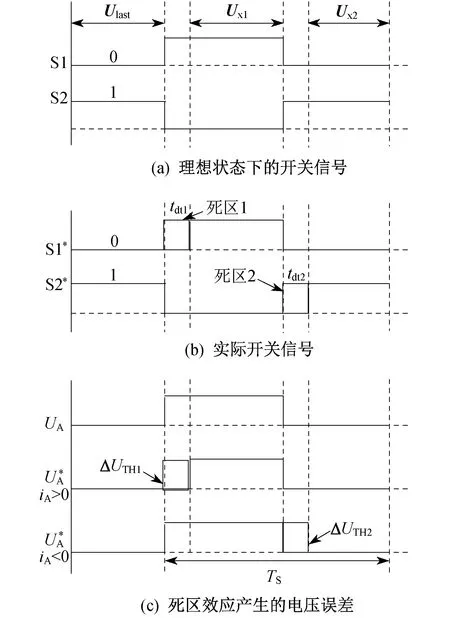
图2 2种状态下的开关信号和电压误差
由图2(c)可以明显看出,逆变器理想输出端电压与考虑死区后输出端电压存在的电压误差为ΔUTH1和ΔUTH2,其将直接影响并网逆变器的转换效率。因此,有必要对逆变器开关器件在工作时产生的死区进行建模,并在考虑死区效应的基础上进行逆变器控制策略的研究。
1.2 死区建模
本文以A相为例,在考虑到死区会影响逆变器输出电压的情况下进行推导[6]。由于开关状态不连续,因此在逆变器建模过程中采用了状态空间平均法。为了便于分析,将逆变器直流侧电容等效成2个电压均为Udc/2 的电容串联。假设所引入的逆变器死区时间为td,开关器件导通时间为ton,关断时间为toff。
以A相为例,可得逆变器理想输出电压为
(1)
式中:S——开关函数,当上桥臂导通时S=1,当下桥臂导通时S=0。
存在开关函数S的系统是离散的,且系统开关频率远大于基波频率。为了消除逆变器的时变特性,用开关周期平均算子对式(1)进行变形,算子公式为
(2)
式中:U(·)——电路中的电量,本文中指逆变器输出相电压;
τ——时间变量。
(3)
考虑死区时间和开关器件延迟时间,得到的开关函数S′在1个周期内的平均值为
(4)
式中:Ton——理想状态下开关管的导通时间;
D——理想状态下的占空比;
D′——考虑死区延迟后的占空比。
D和D′的代数和为实际占空比。其符号取决于A相电流的符号,当iA<0时取“+”,否则取“-”。
由于系统中开关频率远大于基波频率,且采用了正弦脉宽调制,因此调制波在1个周期内可近似成常数,占空比D可表示为
(5)
式中:Um——调制波幅值;
Utri——三角载波幅值。
将式(4)和式(5)代入式(3)中,得到逆变器A相输出电压在1个周期内的平均值为
(6)
同理可得三相电压型逆变器的输出电压表达式。为了便于书写以及后续建模,引入符号函数sgn(),表达式可改写为
(7)
(8)
式中:UAN,UBN,UCN——逆变器A相、B相、C相的输出电压;
iA,iB,iC——逆变器A相、B相、C相的输出电流。
与逆变器理想输出电压表达式相比,式(7)多出了-sgn(iK)UdcD′(K=A,B,C)。该部分是在考虑死区和开关延时后所产生的电压损耗,称为死区畸变电压ΔUDT。
2 考虑死区效应的系统建模
三相电压型逆变器电路拓扑如图3所示。本文将以此为研究对象进行建模分析。图3中,Uin为逆变器直流侧输入电压;C0为直流电容;Q1~Q6为逆变器开关器件;Uu,Uv,Uw分别为A相,B相,C相线电压;RS,iS,LS分别为开关器件等效串联电阻、逆变器输出侧电流、逆变器侧电感;Rg,ig,Lg分别为网侧电感的等效串联电阻、网侧电流、网侧电感;C为滤波电容;RC为电容C的等效串联电阻;UgK为网侧电压,K=A,B,C。
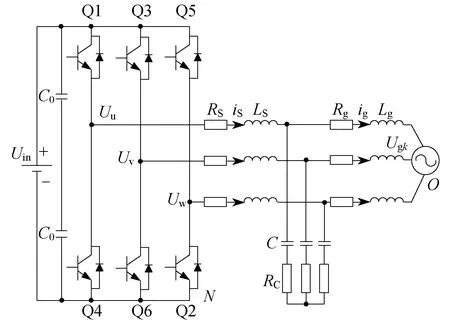
图3 三相电压型逆变器电路拓扑
在考虑死区效应的情况下,根据基尔霍夫电压定律可得:
(9)
式中:RL——逆变器侧电感的等效串联电阻;
SK——门极信号;
UNO——N点与O点之间的电压。
由于逆变器是对称的三相系统,所以有
(10)
在考虑死区效应后,结合基尔霍夫电流定律,可得三相电压型逆变器的数学模型为
(11)
(12)
式中:igK——网侧电流,K=A,B,C;
UC——电容C的端电压。
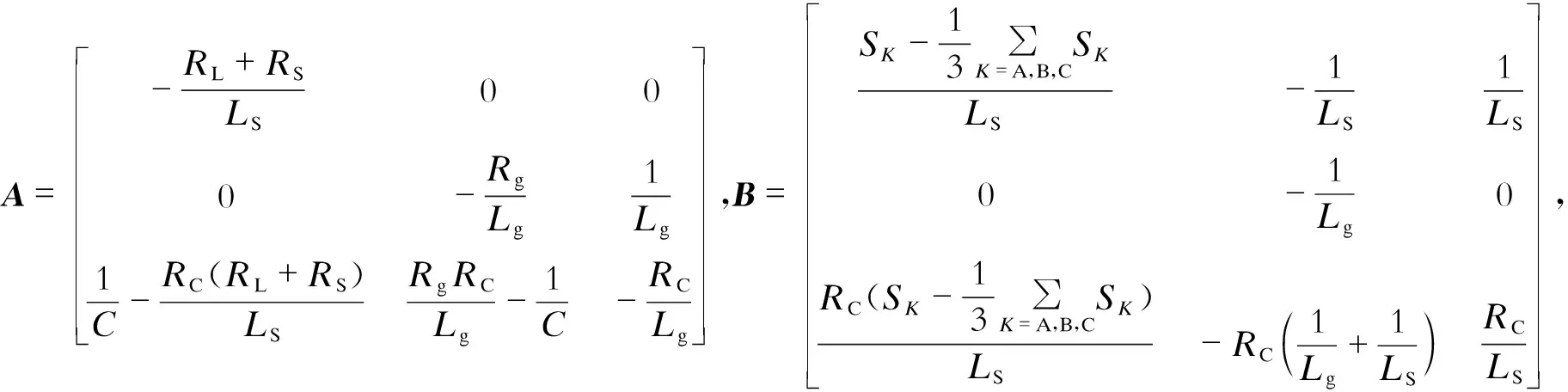
定义状态变量x(t)=[x1,x2,x3]T=[iK,ig,UC]T,将逆变器运行中出现的故障问题、开关器件的老化和损耗,以及外界干扰问题作为一项复合干扰d,从而得到系统的状态空间表达式和输出方程为
(13)
A,B——系统矩阵和控制矩阵;
u——系统输入;
G——系统干扰;
y——系统标量输出;
F——观测矩阵。
3 状态观测器设计

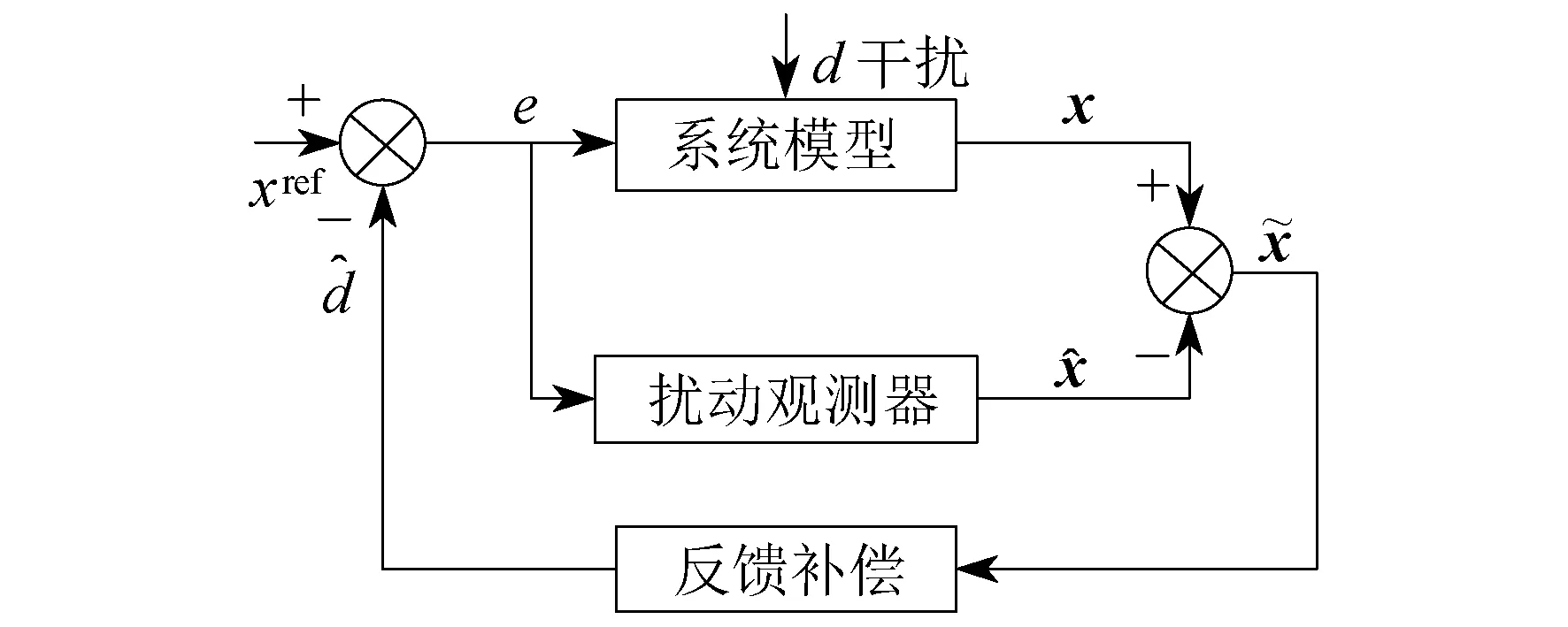
图4 状态观测器结构示意
本文设计的扰动状态观测器模型为
(14)
M——观测误差的反馈矩阵,M∈R3×3;
从而得到观测误差动态方程为

(15)

证 明 通过系统重构,总能找到矩阵E和M使得G(s)为严格正实矩阵。

由假设知ζ(0,t)可以表示为
ζ(0,t)=ζ1(0,t)+ζ2(0,t)≥-γ2
(16)
(17)
式中:L1,L2——与广义误差信号H同阶的对角矩阵,L1=diag{l11,l12,l13},L2=diag{l21,l22,l23};
由此可得:
(18)

(19)
式中:ε——关于t的时间函数;
ζi>0,i=1,2,3。
综上,式(14)设计的状态观测器符合Lyapunov稳定性理论,定理得到证明。
4 控制器设计及稳定性分析
(20)

采用非奇异终端滑模控制方法设计控制器,构造参数矩阵J1和J2分别为
(21)
式中:θ1,θ2——系统设计参数,均大于零。
系统控制律设计如下
(22)
式(22)中,b,p,q,k1,k2,δ均为系统设计参数。其中,p和q均为奇数,且满足1<(p/q)<2;k1和k2均大于零;δ=diag{δ1,δ2},δ1和δ2均大于零。
由此可得:
J2=θ1[Aσ-Akref+Bu-d]+θ2σ=
(23)
(24)
定义滑模z面为
(25)
式中:z=[z1,z2]T;
(26)
(27)

为了消除滑模控制中的“抖振”现象,用饱和函数sat(s/α)代替符号函数sgn(s),公式为
(28)
式中:α——边界层宽度。
5 仿真分析
为了验证本文控制策略的合理性,利用PSIM对系统进行仿真验证。逆变系统各参数设置如下:输入直流电压为360 V;输出交流电压为220 V;开关频率为10 kHz;额定负载为44 Ω;输出滤波电感为(4±2)mH;输出滤波电容为(28.2±13)μF。所设计控制器中的各个参数具体取值:p=13;q=11;δ1=δ2=0.001;k1=100;k2=8×103;θ1=θ2=12。
5.1 额定负载启动
系统刚启动时,在额定负载下的电压U和电流i曲线如图5所示。由图5可知,系统在启动后1个周期内已经达到了稳定,且电压和电流基本没有畸变。这说明逆变器响应速度快,输出电压和电流基本无静差,且其电压总谐波畸变为0.024%,谐波失真很小。
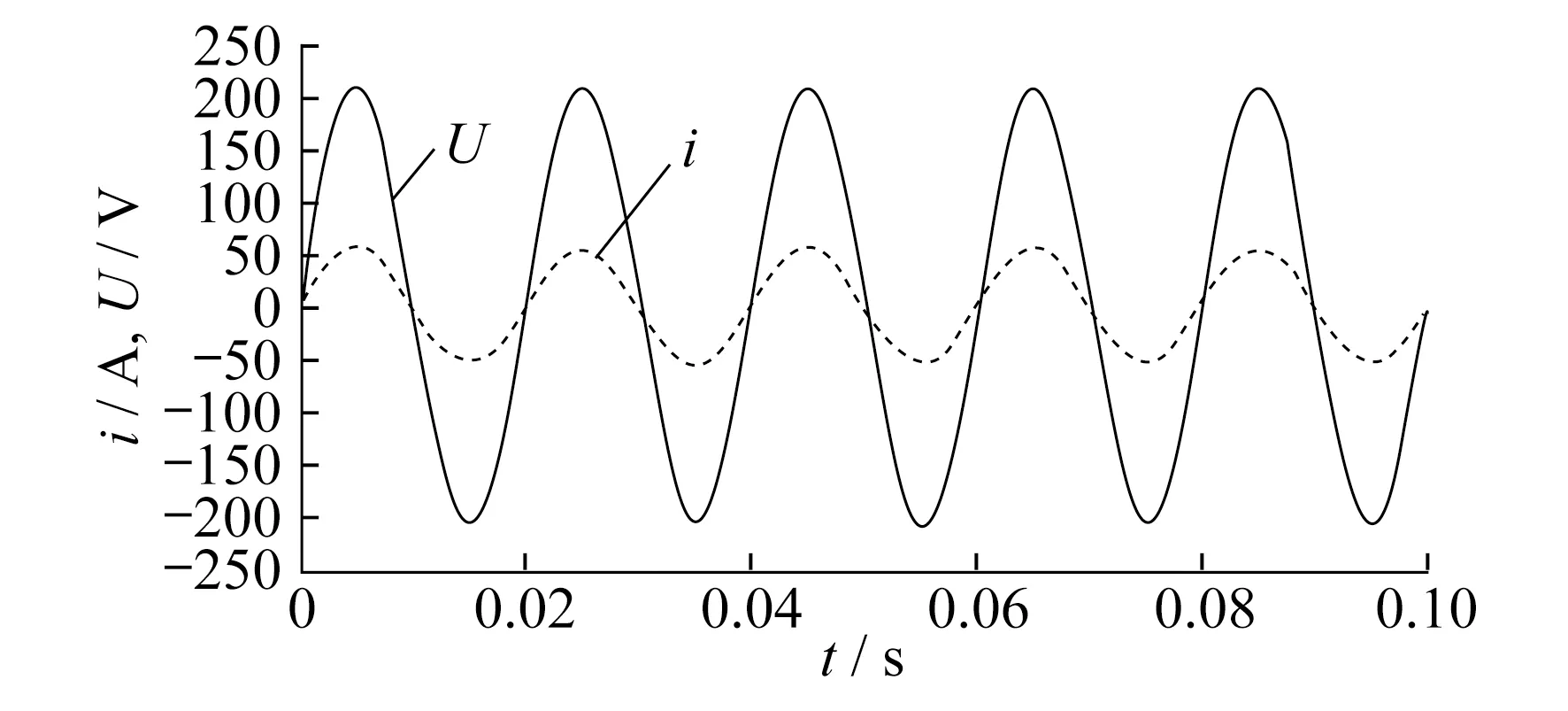
图5 额定负载下的电压和电流曲线
5.2 负载扰动情况
在仿真过程中,当系统运行至0.1 s时将负载电阻由34 Ω调整为15 Ω,接着在0.2 s处由15 Ω调整为34 Ω,负载电压和电流曲线如图6所示。

图6 负载扰动时的负载电压和电流曲线
图6(a)为线性负载电压和电流波形,可以看出,在负载突变过程中,逆变器负载电压基本没有发生变化,电压总谐波失真(Total Harmonic Distortion,THD)为0.025%,且变化平滑。非线性负载采用典型的单相桥式不可控整流电路,仿真结果如图6(b),可以看出,逆变器依然能够输出稳定的电压,其最大幅值为220 V,THD为0.034%。这说明本文所提出的方法具有很强的抗干扰能力。
5.3 死区和切换延时
系统存在开关延时和死区时逆变器输出电压和电流曲线,如图7所示。根据上述对于死区效应的分析和建模可知,死区的存在会降低逆变器的输出电压。由图7可以看出,在0.02 s之前输出电压幅值约为210 V,但很快在0.025 s时输出电压达到了理想输出220 V。这说明在建立逆变器数学模型时考虑死区,且基于死区进行状态观测器的设计,得到的积分滑模控制器可以有效地补偿死区对逆变器输出所带来的影响。
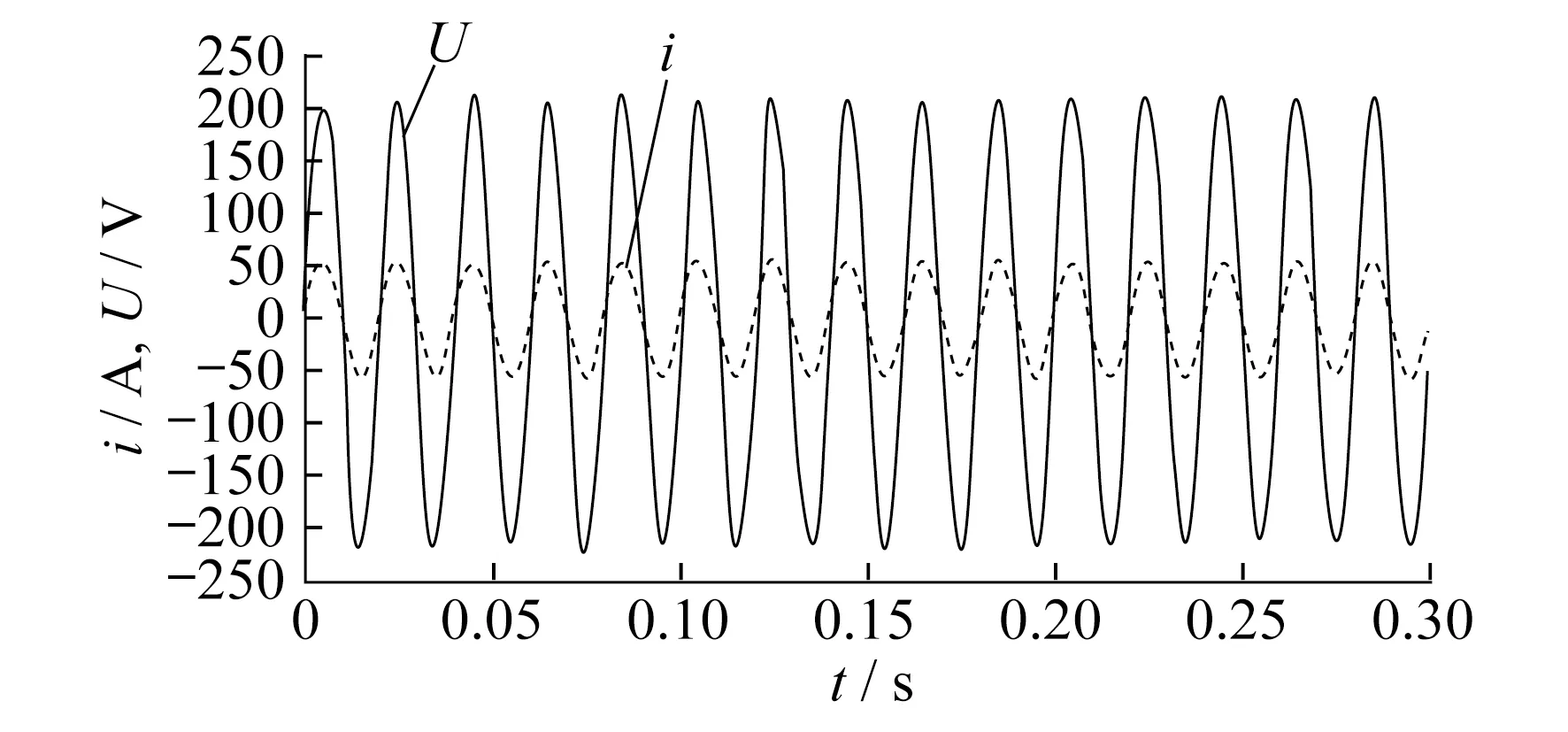
图7 存在开关延时和死区时逆变器输出电压和电流曲线
5.4 直流侧电压扰动
直流侧输入电压Uin由360 V跳变为380 V,紧接着由380 V跳变为360 V,其波形和负载电压、电流波形如图8所示。由图8可知,逆变器输出基本不受输入直流电压扰动的影响。逆变器直流电压通常都是由交流电压经过电容滤波的全桥不可控整流电路得到。为了输出恒定的直流电压,需要选择大电容进行滤波。采用本文的控制策略,可大大减小直流滤波电容值,从而减轻了逆变器的重量,缩小了体积。
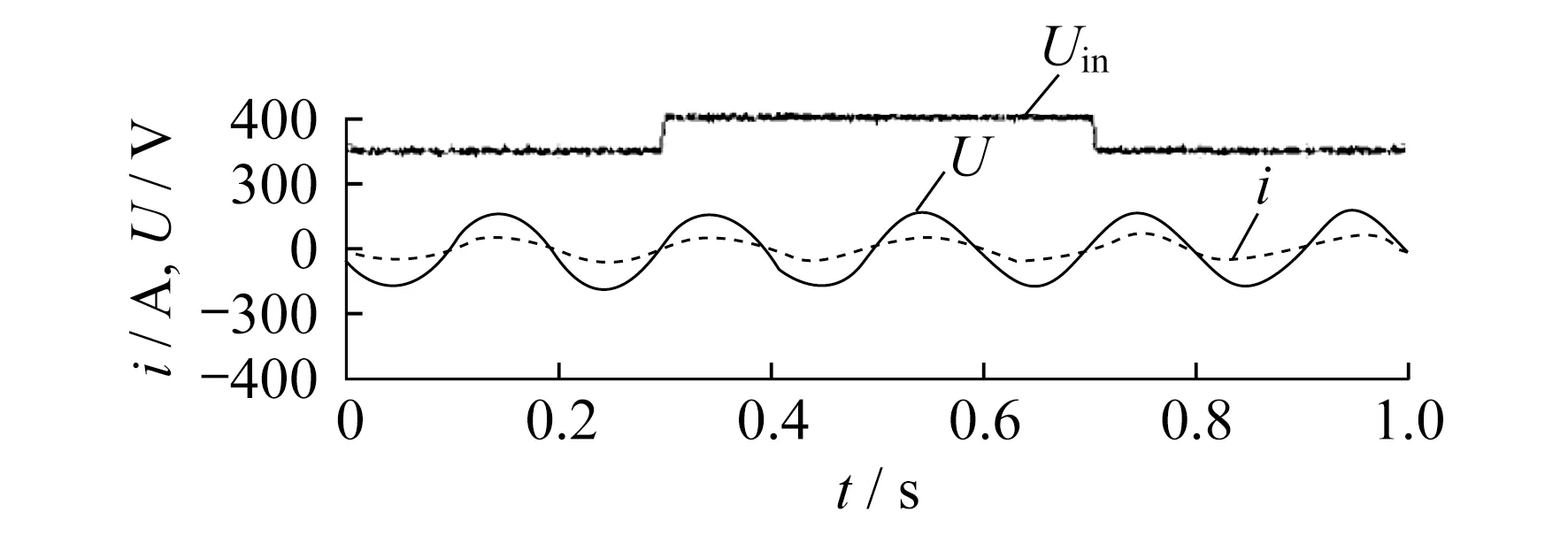
图8 直流电压扰动时的负载电压和电流波形
6 结 语
本文分析了逆变器死区效应,最终得出了死区会降低逆变器输出电压的结论。同时,以三相逆变器中的A相为例,采用状态空间平均法建立了包含死区效应、参数不确定以及外界干扰情况下的非精确数学模型。通过比例积分状态观测器对逆变系统中存在的外界干扰和参数不确定性等多种干扰因素进行有效估计,并结合非奇异终端滑模控制推导出了逆变器反馈控制律,设计了合理的控制器。通过PSIM平台进行了仿真验证,所设计的控制器能够保证系统在存在死区效应、外界干扰和参数不确定的情况下,仍能精确跟踪到期望输出信号,具有良好的追踪性能和较强的鲁棒性。
猜你喜欢
工程数学学报(2020年6期)2021-01-09 02:44:40
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
通信电源技术(2018年3期)2018-06-26 08:05:42
电气化铁道(2017年1期)2017-04-16 06:00:17
航空兵器(2016年5期)2016-12-10 17:14:13
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56