
基于改进多目标粒子群优化算法的雷达资源分配方法
2022-09-09 05:54:40刘俊贤王宏强陶新龙
中国电子科学研究院学报 2022年6期
刘俊贤, 王宏强, 陶新龙
(南京电子技术研究所, 江苏 南京 210039)
0 引 言
在现代高技术、信息化作战中,单部雷达不论在探测能力上,还是电子防御功能上都有较大的局限性[1]。多雷达协同可以提高雷达网的探测性能,有效提高对目标的识别和监视能力[2]。雷达组网是一项复杂的系统工程,如何根据当前的战场态势,及时、高效地制定出合理的资源分配方案是雷达网优化管理与控制的重要环节[3-4],因而研究雷达网资源分配问题具有十分重要的军事意义。
雷达网资源分配不仅可以针对于多雷达协同探测同一目标的情景,比如多雷达执行长征系列运载火箭发射监测任务,或是导弹防御任务等,也可以针对于多雷达协同探测多目标的情景。在不同的应用场景中,雷达网资源分配所看重的目标效益值是不同的。雷达网资源分配问题可以看作是一个多目标优化问题,现有的解决方法主要包括:加权求和法、约束法、目标规划法、极大极小法、智能化算法等[2,5]。文献[2]提出了一种基于改进蜂群算法的雷达网目标分配方法,与基本蜂群算法相比,具有收敛速度快、全局寻优能力增强的特点。文献[4]提出了一种基于博弈论的雷达网分配模型,设计了最佳动态反应目标分配算法,分析了纳什均衡的可行性、存在性和最优性。文献[6]提出了一种基于人工萤火虫算法寻优目标函数以确定分配策略的雷达目标分配方法。为了解决雷达网目标分配动态过程中雷达切换频繁的问题,文献[7]提出了一种基于自适应周期的雷达网目标分配方法,能够减少模型运行计算量和雷达切换频率。但上述研究方法往往是将多目标优化问题通过固定系数加权法[8]或偏好加权法的方式转化为一个单目标优化问题再进行寻优的方法,这些方法权值的选取受目标函数量纲影响太大,欠缺一定的全局性、随机性[9],导致算法搜索时易丢失优秀个体、搜索到的优秀个体难以均匀收敛到帕累托前沿。
针对单目标优化方法的局限性,本文提出了一种基于改进多目标粒子群优化算法[10-18]的雷达资源分配方法。以多雷达协同探测同一目标为例,结合雷达对目标的协同探测覆盖比要高、雷达交接班次数要少、目标首点发现时刻要早的目标效益指标,建立了雷达资源分配多目标优化模型,给出了求解方法并仿真验证了方法的高效可行性。同时,对多目标粒子群优化算法加入的变异改进操作,能够有效避免搜索结果陷入局部最优的情况。
1 模型建立
多雷达传感器协同探测跟踪的目标可以是弹道目标、空中目标、空间目标等,由于弹道目标具有射程远、威胁程度高的特点,常常在执行导弹防御任务时需要更多雷达协同合作来尽可能的覆盖目标更多的弧段,因此本文选择弹道目标作为研究对象。
假设弹道目标的运动时间为[0,T],雷达网中有m部雷达:{s1,s2,…,sm},通过预测弹道目标的飞行规律,我们可以预先计算出第i部雷达对目标的探测弧段时长区间ai为
ai=[ti,s,ti,e],i=1,2,…,m
(1)
式中:ti,s为探测开始时间;ti,e为探测结束时间。若是单个雷达对目标有多个探测弧段区间,可以将每个探测弧段区间都视为一个新的雷达的探测区间,本文所解决的雷达资源分配问题其实就是针对雷达探测弧段区间的任务分配问题。若是第i部雷达对目标的探测弧段时长为0 s,则从雷达网中剔除此雷达,不参与任务分配,得到的最终参与任务分配的雷达为M部:{s1,s2,…,sM}。
要解决雷达网资源分配问题,就要建立若干易于量化的目标函数和约束条件,然后对目标函数优化以获得对任务的有效分配,从而获得更高的分配效益[4]。导弹防御任务中,影响分配效益的主要因素有:1)雷达网对目标的协同探测覆盖占比;2)雷达网协同探测目标时的交接次数;3)目标首点发现时刻。本文选取这三种重要的影响因素作为目标函数,建立以下目标函数模型:

(2)
(3)
minE3=min{t1,t2,…,tM}

(4)
式中:i=1,2,…,M;xi=1表示第i部雷达探测目标,xi=0表示第i部雷达不探测目标;ai为第i部雷达对目标的探测弧段时长区间;T为目标总运动时长;E1为雷达网对目标的协同探测覆盖占比;E2为雷达网协同探测目标时的交接次数;ti,s为第i部雷达对目标的首点发现时刻;ti为第i部雷达对目标的首点发现时刻效益值,当xi=0时,第i部雷达不探测目标,不存在对目标的首点发现时刻,因此取ti=200 000作为惩罚值;E3为雷达网对目标的首点发现时刻。
由于本文研究的是多雷达传感器协同探测跟踪同一目标时的雷达资源分配问题,因此不存在雷达探测容量溢出的情况,本文要考虑的雷达网资源分配约束条件主要为至少选择一部雷达来观测目标,即:
(5)
2 改进多目标粒子群优化算法
粒子群优化算法常用于解决单目标函数优化问题,然而在多雷达协同探测跟踪同一目标的实际问题中,具有多个目标函数需要同时进行优化处理,并且这些目标函数往往互相冲突,这类问题就属于多目标优化问题,应采用多目标优化算法来求解。
2.1 多目标粒子群优化算法
多目标粒子群优化[10-18](Multi-objective Particle Swarm Optimization, MOPSO)算法是由Carlos A、Coello C等在2004年提出来的,用于将单目标粒子群算法扩展应用于多目标优化问题中。MOPSO算法使用帕累托支配的概念来确定粒子的飞行方向,通过粒子间的支配关系比较得到非支配个体并存入全局精英库REP中,依据密度自适应网格估计法从全局精英库中选出全局最优解个体Gbest,同时依据新旧代的种群个体间的支配关系比较,来选出个体历史最优解Pbest,进而通过公式(6)来不断更新粒子群的速度和位置,最终用尽可能少的计算资源得到覆盖整个搜索空间、分布均匀、靠近真帕累托前沿的非劣解集。
(6)
式中:ϖ∈[0,1]为惯性权重;c1,c2是学习因子,通常取c1=c2=2;r1、r2是介于[0,1]之间的随机数。
其中,帕累托支配的概念为:如果个体p至少有一个目标函数值比个体q好,而且个体p的所有目标函数值都不比个体q差,那么称个体p支配个体q。如图1所示,个体p1、p2同时支配个体q,但p1、p2不互相支配。帕累托前沿是指帕累托最优解集对应的目标函数值,图2为帕累托前沿的形状分布。帕累托前沿上要包含足量的帕累托最优解个体,应具有尽可能好的均匀分布性和延展性。
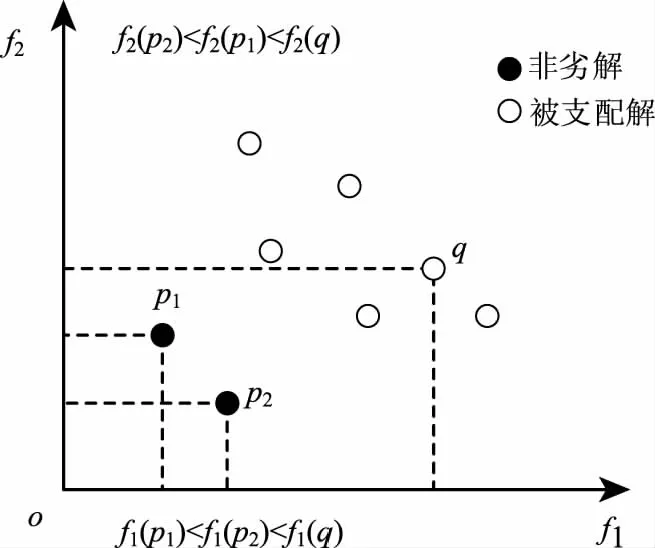
图1 两目标空间上的Pareto支配关系
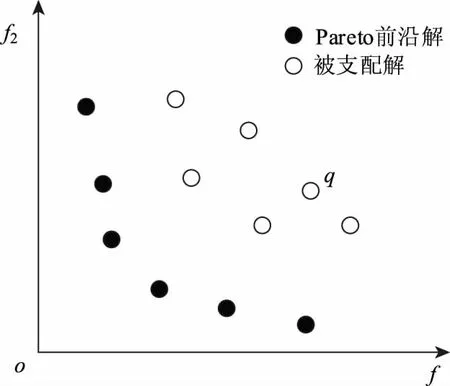
图2 两目标空间上的Pareto前沿解
密度自适应网格估计法[10-11,21]是从全局精英库REP中挑选全局最优解个体Gbest和削减帕累托前沿上粒子个体的有效方法。粒子的密度估计信息是通过等分目标函数空间,并计算每个网格中的粒子个数来获得。粒子所在网格中包含的粒子数越少,其密度值越小,反之越大。因为帕累托前沿应具有较好的均匀分布性和延展性,所以认为密度值越大的网格中的粒子质量越低,密度值越小的网格中的粒子质量越高。密度自适应网格估计法的示意图如图3所示,算法步骤如下(以二维目标空间为例):
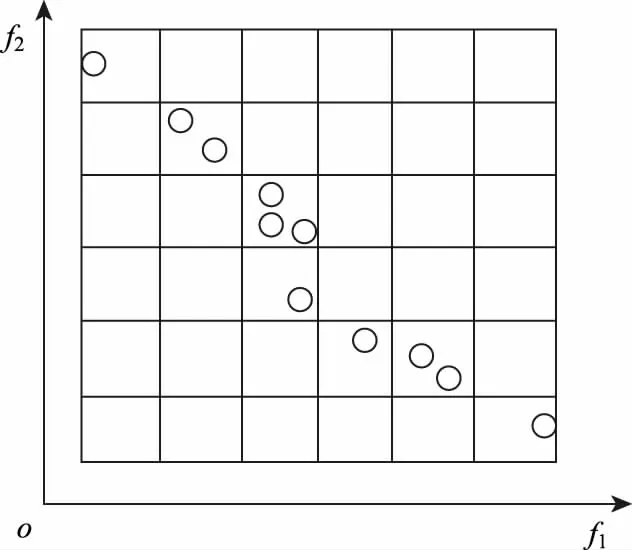
图3 密度自适应网格估计法
参数:At集
输出:目标空间的网格信息及粒子密度估计信息

步骤2:计算网格的模:
(7)
步骤3:遍历At集中的粒子,计算其所在网格的编号,对于粒子i所在网格编号由两部分组成:
(8)
式(7)、(8)中,G=M×M为目标空间要划分的网格数,Int()为取整函数,F1和F2为粒子i的目标函数值。
步骤4:计算网格信息和粒子的密度估计值。
粒子的密度估计值计算公式为
(9)
式中:nj为粒子i所在的第j个网格中的粒子总数。
从全局精英库REP中选择全局最优解个体时,采用轮盘赌法[22-23]的选择方式。当全局精英库REP中的粒子个体数大于所设定的帕累托前沿上的粒子个体数上限Nr时,就需要依据粒子间的拥挤距离来排列选出拥挤距离较大的Nr个粒子。拥挤距离指的是帕累托前沿上的某个体与该前沿上其他个体之间的距离。在多目标优化问题中,个体间的距离通常由个体间的各个目标函数值的差值绝对值相加得到,如图4所示。

图4 拥挤距离表示方法
而个体历史最优解Pbest则是通过新旧代的种群个体间的支配关系比较,将非支配个体(即较优个体)存入新一代种群之中,同时对于不互相支配的个体则随机选择新旧代的其中一个存入新一代种群之中。
2.2 改进多目标粒子群优化算法
多目标粒子群优化算法凭借其高效、快速的优势,成为了解决多目标优化问题的主要研究方向[5]。但由于粒子群算法受初始种群分布情况的影响,在搜寻过程中容易陷入局部最优的情况。为了解决这个问题,本文除了在生成初始种群时提高种群数量、尽可能的使初始解分布均匀广泛的基础上,引入遗传算法的变异操作,在粒子群迭代过程中对部分粒子以一定的概率进行变异,同时保留一部分粒子原有的值,既能避免粒子群陷入局部最优的情况,又不至于让粒子群在迭代过程中过于发散,从而不利于收敛寻优。
本文将粒子群B=(B1,B2,…,Bn)近似均分为三部分,分别为Bsub1、Bsub2、Bsub3,群体Bsub1不进行变异操作,即usub1=0;群体Bsub2以恒定的变异概率usub2=e进行变异;群体Bsub3的变异概率usub3随着种群迭代次数的增加而不断减小,三部分的变异概率公式为
(10)
式中:t为当前迭代次数;tmax为最大迭代次数;nVar为个体中包含的变量个数。
3 基于改进多目标粒子群优化算法的雷达资源分配方法
本文采用改进多目标粒子群优化算法来解决雷达网协同探测跟踪同一目标时的资源分配问题,用[0,1]区间上的概率取值Pi作为第i(i=1,2,…,M)部雷达是否参与目标观测的评判标准。如公式 (11)所示,当Pi∈[0,0.5]时,第i部雷达不观测目标,当Pi∈(0.5,1]时,第i部雷达观测目标。初始种群中Pi由[0,1]中的随机数产生,概率值Pi也将作为多目标优化算法种群个体变量的值,也将参与迭代计算过程。
(11)
算法以雷达网对目标的协同探测覆盖占比、雷达网协同探测目标时的交接次数、目标首点发现时刻作为分配结果的效益值,考虑到改进多目标粒子群优化算法是以优化多目标函数得到最小值,最终得到帕累托最优前沿为目的,因此结合雷达网分配约束条件,构建以下求解模型:
(12)
(13)
(14)
其中,
A=(a1x1)∪(a2x2)∪…∪(aMxM)
基于改进多目标粒子群优化算法的雷达网资源分配算法流程如图5所示。
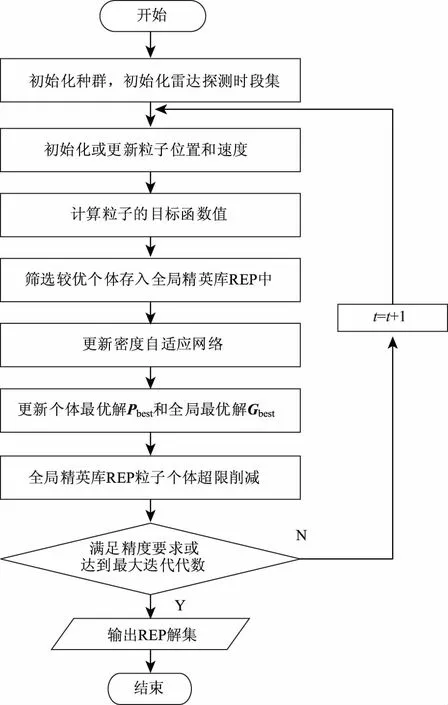
图5 基于改进多目标粒子群优化算法的雷达网资源分配方法流程
基于改进多目标粒子群优化算法的雷达网资源分配方法的具体步骤如下:
步骤1:初始化种群pop:种群中有Np个个体,每个个体有M个变量,即M部雷达,随机生成一个Np×M维[0,1]区间内的概率值矩阵,作为种群中每个个体的位置;假设目标运动时间段为[0,T],随机生成M个[0,T]秒范围内的子时段ai(i=1,2,…,M)作为M部雷达对目标的探测时间段;设定种群迭代最大次数为tmax;设定帕累托前沿上粒子数量上限为Nr;
步骤2:当种群迭代次数为1时,初始化种群中每个个体粒子的速度Vi=[Vi1,Vi2,…,ViM],每个个体粒子的位置Xi=[Xi1,Xi2,…,XiM]依据步骤1中的位置生成法则产生;当种群迭代次数大于1时,粒子的位置和速度依据公式(6)进行更新;
步骤3:依据公式(11)和公式(12)计算种群中每个粒子的目标函数值E1、E2、E3;
步骤4:通过帕累托支配关系法则筛选出当代粒子群中的非支配个体存入全局精英库REP中;若迭代次数大于1,则将新组成的全局精英库REP中的个体两两进行支配关系比较,剔除被支配的个体;
步骤5:更新密度自适应网络,计算出全局精英库REP中粒子的密度估计信息,具体方法见2.1节;
步骤6:依据轮盘赌法从全局精英库REP中选出全局最优粒子解Gbest,若存在多个适应度相同的最优粒子,则随机选取其中一个作为全局最优粒子;当迭代次数为1时,选择个体历史最优解Pbest为个体本身;当迭代次数大于1时,通过新旧代支配关系比较,得到新的个体历史最优解Pbest,方法见2.1节;
步骤7:判断全局精英库REP中粒子个体数量是否大于帕累托前沿上粒子个体数量上限Nr,若是,则计算粒子间的拥挤距离,方法见2.1节,依据拥挤距离排序结果,选出Nr个拥挤距离较大的粒子组成新的全局精英库REP;
步骤8:判断迭代次数是否大于最大迭代次数tmax并且精度是否满足要求,若是,则停止迭代计算;若否,则重复步骤2~ 步骤8,直到达到停止计算条件为止;
步骤9:输出最终的全局精英库REP即为优化结果解集。
4 仿真实验
本文选择20部雷达参与协同导弹预警资源分配,假设观测对象为飞行时间[0 s,2 000 s]的弹道目标,每部雷达对目标的探测弧段时长如图6所示。
图6 雷达探测弧段分布图
现从生成的20个雷达探测弧段中采用改进多目标粒子群优化算法挑选出分配效益高的弧段集合,设定改进多目标粒子群优化算法初始种群个体数量为30,帕累托前沿上个体数量限制为20,粒子群恒定部分变异的概率usub2=0.2,种群最大迭代次数为100,粒子速度和位置更新公式中的惯性权重ϖ、学习因子c1和c2、粒子速度最大值Vmax、粒子位置取值范围[Xmin,Xmax]、密度自适应网络维数G=M×M×M(本文优化问题目标函数为三维)的参数如表1所示。

表1 改进多目标粒子群优化算法参数取值
仿真得到的帕累托前沿个体集中分布情况如图7所示,最终存在四种分布情况,这四种分配方案在综合目标函数值较小的基础上各自或具有首点发现时刻较低、或具有雷达网对目标的探测覆盖比较高、或具有雷达交接次数较少、或具有综合性能好的优点,体现了改进多目标粒子群优化方法是针对多目标函数综合寻优的特点。

图7 改进多目标粒子群算法优化结果目标函数值分布
仿真最终得到的雷达资源优化分配方案如表2所示,对应的探测弧段选择情况如图8 (a)~(d)中粗线部分所示。
表2 雷达资源分配方案

图8 四种雷达资源分配方案下探测弧段选择
由图8可以看出,方案1中的粗线部分弧段选择结果首点发现时刻最早为第15 s,且探测时长相对较长,雷达网中参与目标探测的只有7号雷达,雷达交接班次数为1,次数最低;方案2中粗线部分弧段选择结果首点发现时刻不是最优,但是雷达交接班次数也为最低1,单雷达探测弧段覆盖比为20部雷达中最高;方案3中雷达交接班次数也较少为2,同时满足首点发现时刻最早、两部雷达协同探测覆盖比较高的优点;方案4中雷达交接班次数较少为3,首点发现时刻最早,雷达协同近似实现目标全覆盖,且探测弧段交接连续,能实现对目标的稳定跟踪,在交接班次数满足一定需求的情况下是四种方案中相对最优的。
当初始种群生成不够均匀,比如创建的30个种群初始个体中第7、11部雷达对应的选择概率值全都小于0.5,则采用无变异操作的多目标粒子群优化算法的分配结果如图9(a)所示,采用加入变异操作的改进的多目标粒子群优化算法的分配结果如图9(b)所示(分配结果多种时挑选结果中雷达覆盖比最高的方案)。
图9 无变异操作和改进的多目标粒子群优化结果对比
由图9 (a)可以看出,在初始种群所有个体中第7、11部雷达均不参与资源分配时,最终的分配方案的首点发现时刻是除下雷达11中最优的,协同覆盖占比计算后为92.5%,雷达交接次数为3,此时的分配方案综合来说仍是局部较优的;但图9 (b)中采用加入变异操作的改进多目标粒子群算法计算时,尽管初始种群中第7、11部雷达均不参与资源分配,但经过变异迭代计算后,最终结果包含第7、11部雷达参与资源分配,首点发现时刻是15 s,协同覆盖占比计算后为96.75%,雷达交接次数为3,为全局最优方案。由图9可知,无变异操作的多目标粒子群优化算法仍然具有可能陷入局部最优解的问题,而改进后的多目标粒子群算法可以有效的避免局部最优情况的发生,依然能得到全局最优解,稳定性较高。
5 结 语
本文针对雷达组网协同探测同一目标时的雷达资源优化分配问题,考虑到单目标优化方法的局限性,提出了一种基于改进多目标粒子群优化算法的雷达资源分配方法。结合雷达组网协同探测目标时探测覆盖比要高、雷达交接班次数要少、目标首点发现时刻要早的原则以及雷达探测约束条件,建立了雷达资源分配优化模型,给出了采用改进多目标粒子群优化算法解决雷达多目标优化问题的具体算法步骤。仿真结果表明:本文提出的雷达资源分配方法具有很好的收敛性,分配结果质量较高、高效可行,且不存在最大探测容量限制,也能有效避免粒子群算法易陷入局部最优的情况的发生。所提方法同样能拓展到解决多雷达多目标分配问题中,只需针对多探测目标选取合适的目标函数,建立恰当的多目标优化模型即可。基于改进多目标粒子群优化算法的雷达资源分配方法能有效解决雷达网资源分配问题,具有一定的应用价值。
猜你喜欢
上海航天(2024年1期)2024-03-08 02:52:28
电子设计工程(2022年24期)2022-12-23 12:03:28
光学精密工程(2021年8期)2021-10-04 11:46:28
英语文摘(2020年10期)2020-11-26 08:12:20
测控技术(2018年7期)2018-12-09 08:57:56
成都信息工程大学学报(2018年6期)2018-03-21 05:45:52
雷达学报(2017年1期)2017-05-17 04:48:57
火控雷达技术(2016年2期)2016-02-06 02:29:07
四川建筑(2015年4期)2015-06-24 14:08:40
计算机工程(2014年6期)2014-02-28 01:25:32
