
一种多构态视觉防错相机支架机构设计与研究
2022-09-06 03:39廖益丰陈桂平唐小凤
装备制造技术 2022年5期
廖益丰,陈桂平,唐小凤
(柳州铁道职业技术学院,广西 柳州 545616)
0 引言
随着柔性产线[1]的不断增多,视觉防错已经逐渐成为了制造业中必不可少的一部分。在产品检验的过程中,同一产线对多种不同型号的产品进行检测已成为趋势,然而产品的尺寸不同和位置摆放不同使视觉防错支架必须具有较强的灵活性、适应性和工作空间,以适应狭小的安装环境和多样化的产品检验需求。针对上述问题,视觉防错支架机构灵活性、适应性和工作空间的研究越来越受到人们的重视。高丰等[2]研究了总装生产线制造过程防错中的设备防错种类,以及防错技术研究应用案例;盛大春等[3]针对汽车总装工艺制造过程中,销售配置复杂、物料种类多以及防错难等问题进行专项研究,并制定相应的智能化防错技术应用方案;柳佳琛等[4]对缺陷及其防错能力进行分类评级,构建了缺陷的防错能力评价方法。尽管视觉防错系统的研究已有了一定的热度,但灵活性强、适应性高且能根据不同工况改变构态的视觉防错相机支架还研究较少。
本研究设计的是一种灵活性强、适应性高且能根据不同工况改变构态的视觉防错相机支架机构,其具有良好的应用前景。
1 支架机构的结构设计与构型分析
1.1 邻接矩阵分析
计的相机支架机构结构示意图如图1 所示。
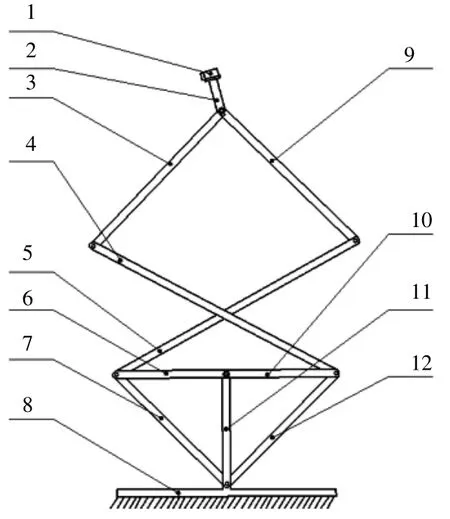
图1 相机支架结构示意图
该相机支架机构可通过构件重组的方式在5 种构态中灵活转换,其构态示意图如图2 所示。
机构各构态下的拓扑结构示意图如图3 所示。
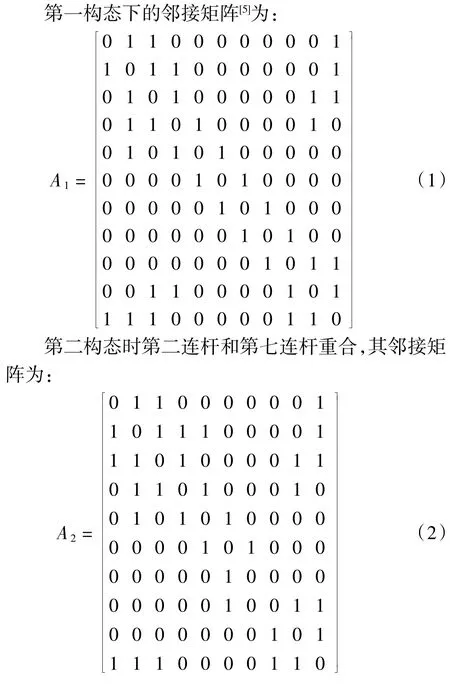
第三构态时,第八连杆脱离与第五连杆和第九连杆的约束并与第十连杆重合,其邻接矩阵为:

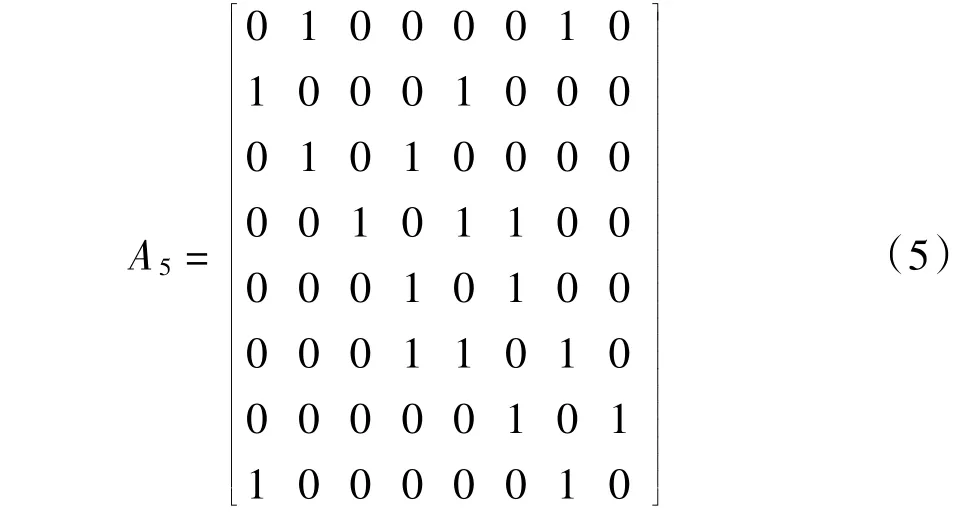
第五构态时,第五连杆、第六连杆和第九连杆重合,第八连杆和第十连杆重合,其邻接矩阵为:
第一构态下第六连杆、第八连杆和第九连杆相连,构成稳定结构,使该构态下具有机构底部刚度强且前部灵活性高的特性;第二构态下机构具有多三角稳定结构,是稳定性最强的一种构态,但工作空间也最小;第三构态和第五构态是灵活性较高的构态,但刚度较小;第四构态工作空间大,灵活性较高。
1.2 自由度计算
采用CGK 公式对机构各构态进行自由度计算,CGK 公式[6]为:

2 运动学分析
2.1 正向位置分析
该相机支架机构为平面机构,采用矢量法对其进行运动学分析。各构态简图如图4 所示。
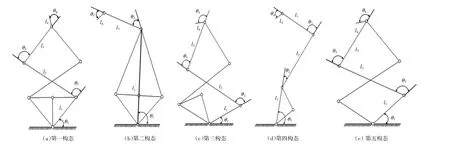
图4 机构简图

2.2 工作空间分析
上文得到了各构态的正向位置方程,接下来对其进行数值仿真分析,求出其工作空间。


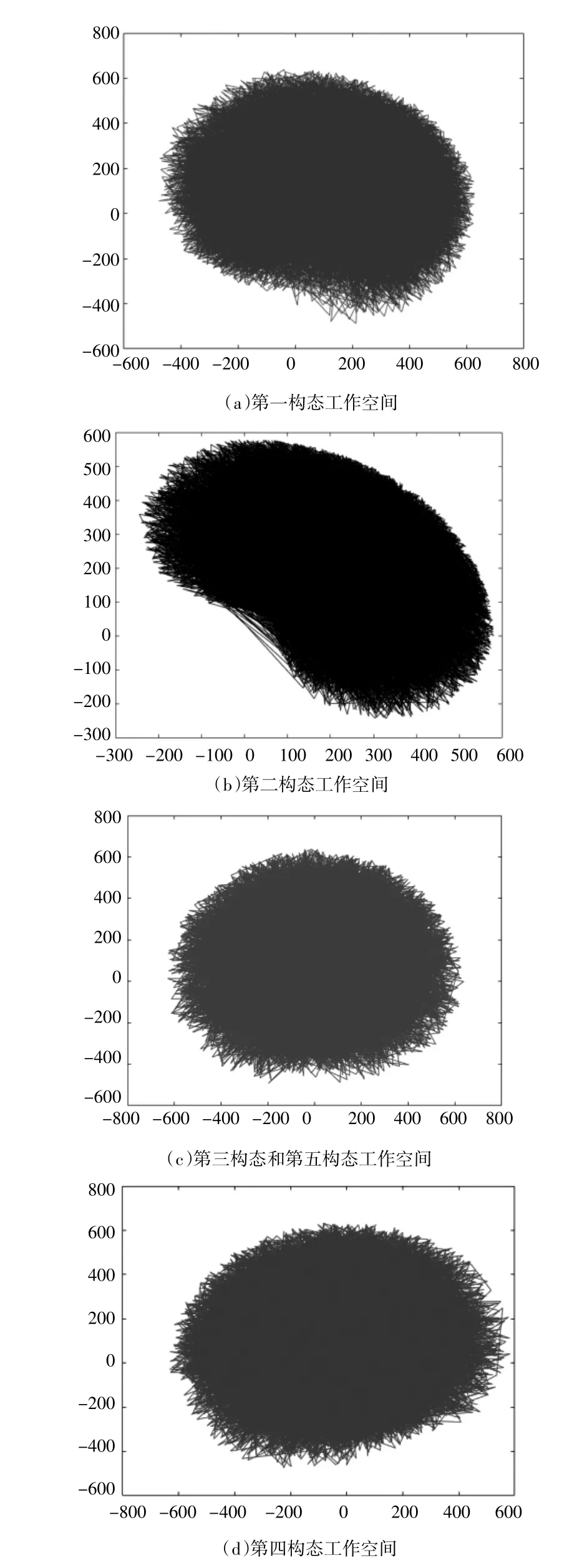
图5 工作空间
从上图可以看出该支架机构具有较大的工作空间,其中第三构态和第五构态的工作空间最大且分布均匀;第一构态和第四构态工作空间适中;第二构态工作空间最小。
以上是对相机支架机构的理论分析,其实际三维模型如图6 所示。

图6 机构三维模型
3 结束语
(1)针对现有视觉防错相机支架灵活性不高、适应性不强和工作空间不足的问题,提出了一种多构态视觉防错相机支架机构,该支架机构可根据不同的工作情况改变自身构态,使机构具有较强的灵活性和适应性以及较大的工作空间。
(2)分析了该视觉防错支架机构在各构态下的邻接矩阵并采用GCK 公示计算了其自由度。
(3)采用矢量法建立了支架机构各构态的正向运动学方程并采用蒙特卡洛法对各构态下的工作空间进行了对比仿真分析。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
英语文摘(2021年11期)2021-12-31
新世纪智能(英语备考)(2021年4期)2021-07-28
船舶标准化工程师(2019年4期)2019-07-24
福建基础教育研究(2019年9期)2019-05-28
中国外汇(2019年23期)2019-05-25
家庭影院技术(2018年11期)2019-01-21
汽车实用技术(2017年16期)2017-09-21
北京航空航天大学学报(2016年9期)2016-11-16
汽车实用技术(2014年9期)2014-02-20
