基于AIS和雷达数据融合的多船舶跟踪
2022-09-06 13:16徐得志邓志华
武汉交通职业学院学报 2022年3期
高 曦 徐得志 邓志华
(武汉交通职业学院,湖北 武汉 430065)
0 引言
长江内河航运作为我国贯穿东西的黄金水道,在《国家综合立体交通网规划纲要》国家战略部署下,正在经历以“安全、高效、绿色、智能”为特征的新一代航运系统[1]伟大变革。以船舶交通管理系统(Vessel Traffic Service,VTS)为基础,国内外积极开发智慧海事监管平台,致力于由“人盯死守”的传统海事监管方式向以智慧管理为核心的现代方式转变[2]。利用船舶自动识别系统(Automatic Identification System,AIS)、雷达、闭路电视(Closed Circuit Television,CCTV)等感知方式实时、精准掌握船舶动态信息,及时采取合理措施有效引导船舶航行行为,可实现船舶的自动跟踪和碰撞预警。
AIS作为一种船舶广播式应答系统,能够自动向外发送本船的静态和动态信息的同时,不断接收周围他船发送的此类信息,是最常见的船舶定位跟踪设备。雷达、CCTV是VTS用于水路交通监管的主要工具,对交通密集区域、进出航道和高风险水域的船舶实时动态监测。Kalman滤波、粒子滤波、相关滤波、深度学习以及其他衍生滤波器是常用的目标跟踪方法[3]。目前针对雷达和AIS信息融合的研究还比较有限,实际应用中还有许多值得进一步研究的问题[4]。现阶段国内外研究热点集中在航迹关联,主要从统计学角度和模糊隶属角度涉及关联算法,并取得了丰富的研究成果。方琼林等[5]针对复杂场景中船舶视觉跟踪问题提出一种自适应分数Kalman滤波算法,有效降低了跟踪器的漂移效应。王群朋等[6]采用Kalman滤波算法对夜间航行船舶在视频图像中形成的多个光斑进行跟踪,并根据光斑变化规律实现船舶检测和跟踪。基于多源异构数据融合的船舶跟踪方法与传统单一监测手段相比,具有更好的环境适用性和检测精度。潘泉等[7]针对目标跟踪联合优化问题,综述了数据融合在多目标跟踪方面的研究进展。陈永利[8]提出一种多船舶雷达信息的轨迹融合算法,利用本船和他船的雷达信息,提升目标探测精度。陈信强等[9]针对多目标船舶跟踪问题,提出一种多维特征融合机制和尺度变化估计的跟踪框架,引入位置滤波器判定视觉图像中的船舶位置。马瑞鑫等[10]提出一种正态性隶属度函数计算模糊矩阵的方法,对激光点云与AIS数据进行融合,用于船舶的动态跟踪。多目标跟踪步骤主要分为目标初始化、运动预测、数据关联和状态估计。目标初始化是对场景中出现的新对象进行建模,并为其定义一个新的跟踪ID。文成宇等[11]从多假设跟踪、网络流、深度学习、主题发现四类方法综述了多目标跟踪目标初始化方法。数据关联负责多目标跟踪过程中多个观测和多个目标之间的关联,不仅需要判断观测信息是来源于真实目标还是环境干扰,还应识别出对应哪个目标的观测。蔡秀梅等[12]和龚轩等[13]分别综述了包括最近邻法、联合概率、粒子滤波等在内的经典数据关联算法。动态复杂的水上环境使得雷达检测系统存在大量漏检和虚警现象,这便导致多目标跟踪算法性能下降[14]。
AIS和雷达是VTS重要的信息获取方式,前者能提供静态信息、安全信息和航次相关信息[15]等动静态数据,然而数据质量和实时性不高,后者能够实时、准确地提供监控范围内船舶的动态信息。两者既有共同信息,在性能方面也能够互相弥补。因此,AIS与雷达数据融合对提升船舶航迹跟踪精度,实现智能航行和智能航保具有重要价值。本文以长江某航段为对象,研究基于AIS与雷达数据融合的多船舶航迹跟踪方法,设计一种多船舶跟踪框架,包括数据关联、目标初始化、运动预测和状态估计四个核心组成部分。同时,对AIS、雷达原始数据进行重采样、时空对齐等预处理,确保符合输入要求。最后,开展实验评价,分析所提方法的跟踪性能,包括跟踪精度和计算代价。
1 多船舶跟踪框架
目前,AIS与雷达的信息数据融合方式可分为集中式、分布式、混合式三种,其中分布式以实时性强、可靠性高分布式应用最为广泛。本文设计一种基于分布式AIS与雷达数据融合的多船舶跟踪框架:首先将AIS、雷达原始数据进行预处理(AIS解析、降噪),并经过时空配准转换至同一个坐标系当中;其次,利用运动特征相似度将雷达数据与跟踪轨迹进行关联;随后,建立运动方程对船舶运动进行预测,以关联的雷达或AIS数据作为观测信息,利用Kalman滤波对船舶当前时刻的运动状态进行更新,实现最优估计。该多船舶跟踪框架主要包括四部分:预处理、数据关联、运动预测和状态更新,如图1所示。该方法可以实现以下目标:(1)不同(雷达、AIS)坐标系统下同一目标的数据关联,快速识别雷达系统中的船舶与非船舶目标;(2)雷达与AIS数据融合可以获得更高质量的船舶航迹,确保航行安全。
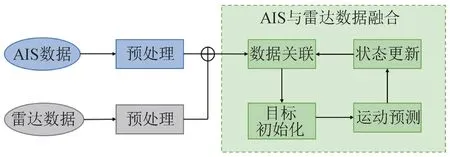
图1 基于AIS与雷达数据融合的多船舶跟踪框架
1.1 数据预处理
AIS提供的船舶动态数据是基于大地经纬度坐标系,同一艘船的AIS动态信息发送时间间隔与自身运动状态相关,约2~12 s之间,停泊船舶为3 min。雷达数据建立在以雷达为原点的极坐标系下,检测周期为2~4 s。AIS和雷达数据不在同一个空间坐标系下,时间上也是异步的。为实现两者的关联和融合,本文须将其转换至同一个空间坐标系,时间上也需要对准,即时空配准。
(1)坐标转换
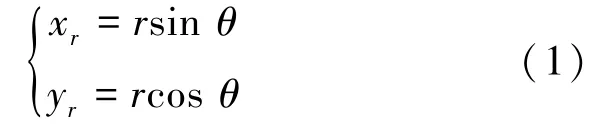
假设雷达坐标系(r,θ),AIS坐标系(L,B)。空间配准就是将雷达和AIS的信息数据融合到同一坐标系统下,本文选用以雷达为原点的直角坐标系为系统坐标系。假设O为雷达位置,x、y分别指向东经和北纬方向。雷达和AIS捕获同一个目标,对应参数分别为(r,θ)和(L,B),则雷达目标在系统坐标系O-xy的位置(xr,yr)可表示为
AIS所获位置信息是由GPS提供,采用墨卡托投影方法将大地坐标的经纬度变换成平面直角坐标,如公式(2)~(5)所示。
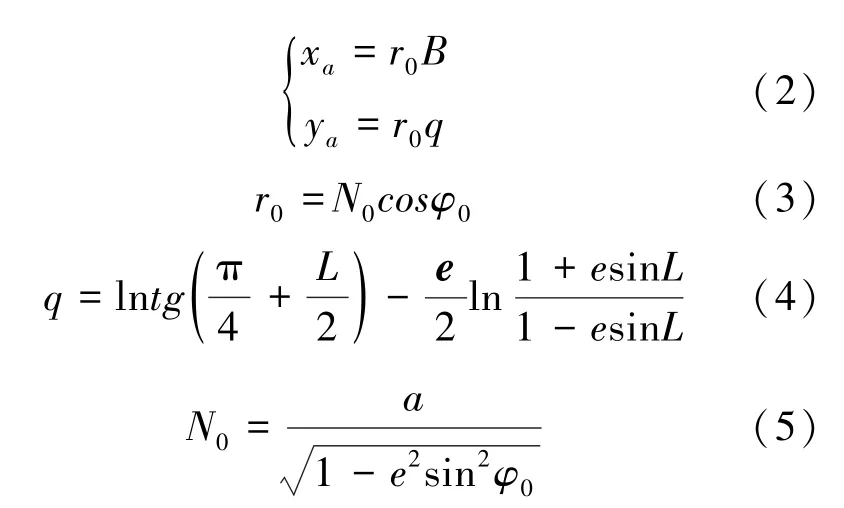
式中:r0为基准纬度圈半径,为常数;q为等量维度,a为地球长半径,e为椭球的第一偏心率,N0为墨卡托基准纬度卯酉圈曲率半径,φ0为墨卡托投影变换的基准纬度。(L,B)为墨卡托变换输出的WGS-84经纬度,(xa,ya)则是墨卡托直角坐标。
(2)时间对准
由于雷达的扫描周期较AIS来说相对固定,所以采用雷达的采样时刻作起始时间基准,建立阈值为

式中:ta是AIS信号扫描周期,tr是雷达信号扫描周期,C为阈值。
1.2 数据关联
数据关联包含航迹关联,是AIS和雷达信号数据融合的关键,目前关联算法主要有统计法和模糊数学法,其目的是将无序的雷达和AIS数据作为观测信息来判定是否为同一目标,是则关联分配到某个目标进行跟踪,否则将作为噪声被丢弃。本文采用基于聚类的数据关联方法,其基本思想是将雷达m个观测数据分配至当前跟踪目标,使得整体距离相似度最小。考虑到雷达数据的点云特征,多个雷达数据允许被判定为同一目标的观测数据。
假设某一采样时刻雷达获取的位置数据为[xr,1,xr,2,…,xr,m],当前跟踪目标有n个,可表示为[xt,1,xt,2,…,xt,n],以当前跟踪目标状态为中心,计算每一个雷达数据xr,i到某一类中心xt,j的欧式距离

式中:xr,ik表示雷达观测向量xr,i的第k个属性,同理xt,jk。雷达观测与跟踪目标之间的数据关联可以通过两者欧式距离之和最小化实现,具体计算公式如下所示:

式中:Ci(i=1,…,n)表示雷达数据的关联序号,取值范围为当前跟踪目标数量以及-1。-1表示该雷达数据远离于所有的跟踪目标,属于干扰噪声或者新目标。
1.3 目标初始化
目标初始化是对当前跟踪目标进行初始化,根据数据关联结果对当前跟踪的目标进行更新,新增或者删除跟踪目标。
当多船舶跟踪系统在1 min内连续收到同一艘船舶的AIS数据时,且该船舶不在当前的跟踪列表中,则为其定义一个新的跟踪目标,其目标状态定义为

式中:i为该目标的跟踪序号,x,y分别为该目标的绝对坐标,s是相应的对地速度,c表示对地航向。
假设当前的跟踪列表X=[x1;x2;…;xn](i=1,…,n),如果其中某目标xi超过1 min没有关联新的观测数据(AIS或雷达),则将其从跟踪列表X中删除,表示该目标已经消失或者跟踪结束。
1.4 预测与更新
以Kalman滤波为融合框架,建立船舶状态转移方程,对船舶运动状态进行预测,将关联后的雷达或AIS数据作为观测信息,对目标船舶的状态进行更新,通过多源数据融合,实现多船舶在线跟踪。
假设船舶在短时间内近似匀速运动,那么单个船舶运动状态转移方程可以表示为

式中:xk()、xk-1( )分别表示时刻k和k-1的船舶运动状态向量,包括位置坐标(单位:m)、航速(单位:m/s);F为4×4大小的状态转移矩阵,可用公式(11)表示;W表示4×1的系统噪声向量,符合标准正态分布。
式中:Δt为状态转移时长(单位:s)。
随后,利用关联的雷达或AIS数据,建立状态观测方程,如公式(12)所示:

式中:z(k)、x(k)分别表示时刻k的船舶运动观测向量和预测向量;H为4×2大小的观测矩阵,可用公式(13)表示;Q表示2×1的系统噪声向量,符合标准正态分布。
根据Kalman滤波器工作原理,计算船舶运动状态的最优估计:

式中:Kk为时刻k的Kalman增益,与预测向量、预测协方差相关。由于线性假设,可以通过公式(10~13)扩展,可同步实现多船舶运动预测和状态更新。
值得注意的是,基于AIS与雷达数据融合的多船舶跟踪可分为以下几种情况。当前时刻有AIS或雷达数据时,跟踪过程包括运动预测和状态更新;当前时刻AIS和雷达数据都不可得时,跟踪过程仅包括运动预测。当连续缺少AIS或雷达数据作为观测信息时,目标初始化模块将停止对该目标的跟踪,意味该目标跟踪结束。
2 结果与分析
天气良好情况下,利用长江某航段AIS、雷达数据开展实验,验证所提多船舶跟踪方法的有效性。
首先,对该航段的AIS报文进行解析,提取船舶的动、静态信息,本文主要利用船舶的MMSI码、经纬度位置等数据。然后,将AIS、雷达提取到的船舶动态数据转换至同一空间坐标系,并根据时间戳信息进行同步,如图2所示。图2(a)为AIS数据,不同的船舶位置信息用不同颜色标识,并使用MMSI作为船舶身份识别码;图2(b)为对应时空条件下的原始雷达检测信号。经统计可知,该场景共包含25个船舶目标,累计观测时长2个小时。
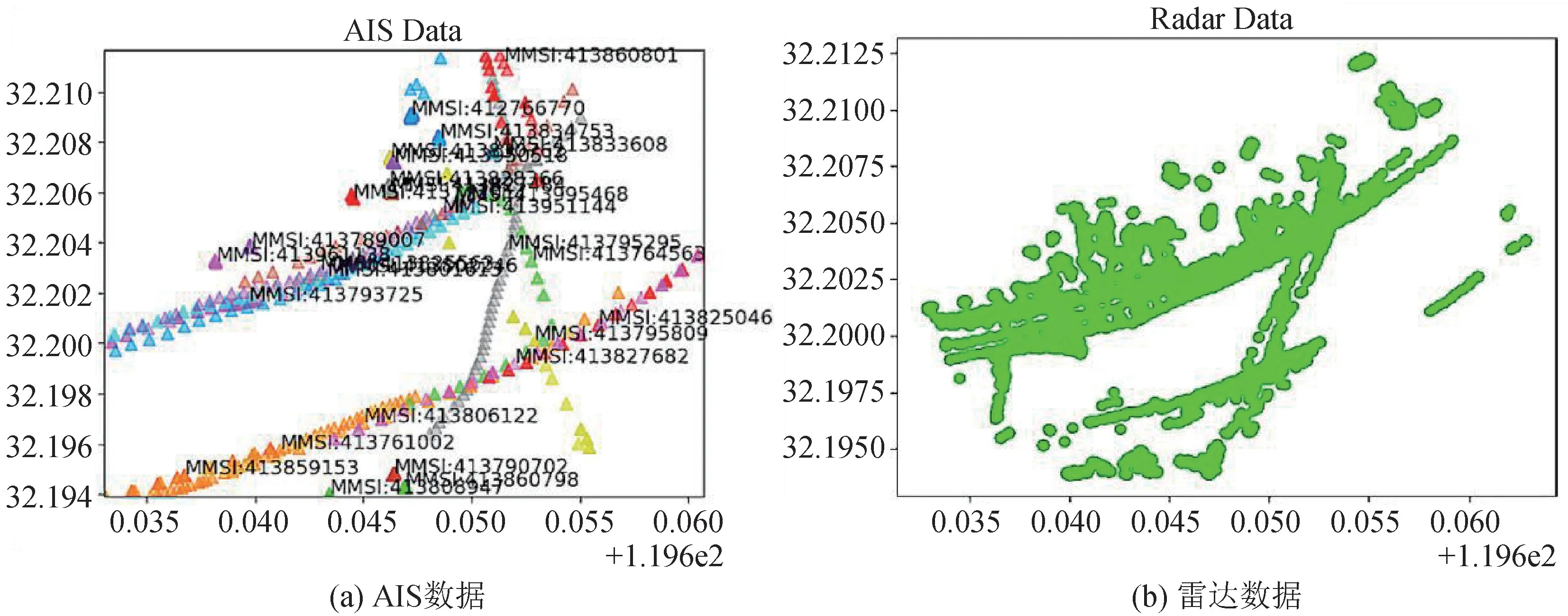
图2 船舶动态数据
使用预处理后的AIS、雷达数据对多船舶跟踪方法进行测试,结果如图3所示。雷达数据实际刷新时间为4~10 s,AIS数据受接收带宽限制,同一个船舶的数据刷新时长也被大大延长。因此,所提的多船舶跟踪方法的计算周期设置为2 s,即每2 s对所有目标的状态进行预测和更新。当一个新的目标船舶AIS数据连续两次可得时,此时目标初始化模块启动一个新的跟踪线程加入到多船舶跟踪框架当中。随后,利用不同时刻得到的AIS或雷达数据作为观测信息,并结合该目标船舶的运动预测,对其进行持续在线跟踪,直到长时间(超过40 s)内无法获得新的观测信息。目标初始化模块在每一个跟踪周期内负责对所有跟踪线程进行判定,删除不适合继续跟踪的目标,增加符合跟踪条件的目标。对图3中目标的跟踪结果分析可得,所提方法的平均误差为45.3 m,最大误差为82 m。引起误差的原因主要在于雷达观测数据受大型船舶体积影响导致存在偏置误差,AIS观测数据的实时性不高,对机动性较强的小型船舶效果较低。
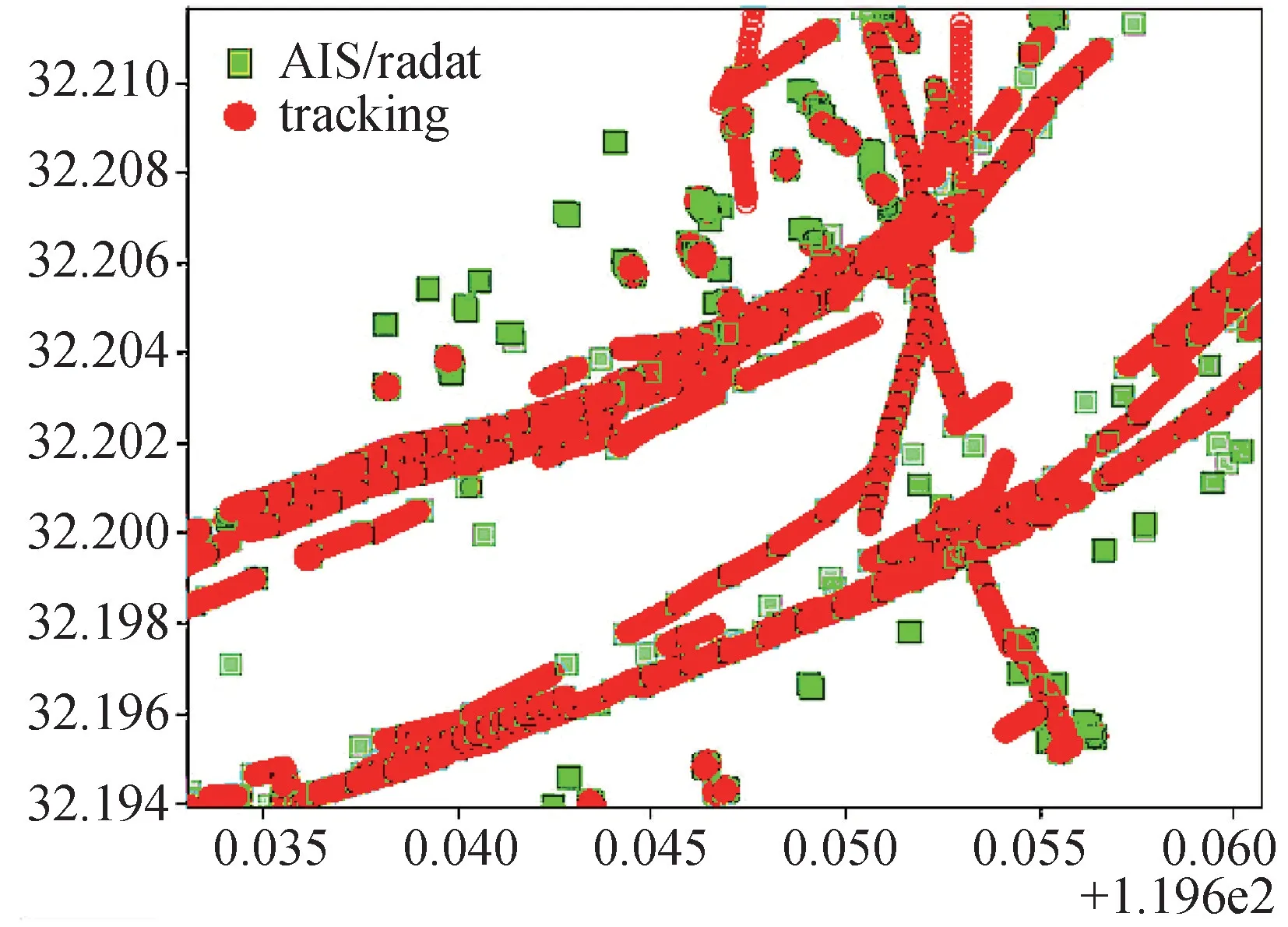
图3 多船舶跟踪结果
为验证所提方法的实时性,本文在多船舶跟踪程序执行过程中加入了时间计算函数。本文开展实验的计算平台配置:CPU i7-10510U,8 G内存。所提方法在跟踪不同数量目标时的时间消耗如图4所示。所提方法在实现多目标跟踪过程中,是将所有目标状态置于一个跟踪矩阵当中进行同步处理,而不是跟踪线程迭代,因此消耗时间并不是单纯地叠加。当目标数量逐渐增加后,计算机要处理的矩阵维度也会随之增大,导致多船舶跟踪所消耗的时间成本逐渐加大。由图4可知,尽管所提方法在同时跟踪25个船舶目标时,消耗时间为0.06 s,但仍远低于多船舶跟踪方法的执行周期(2 s),满足实时性要求。
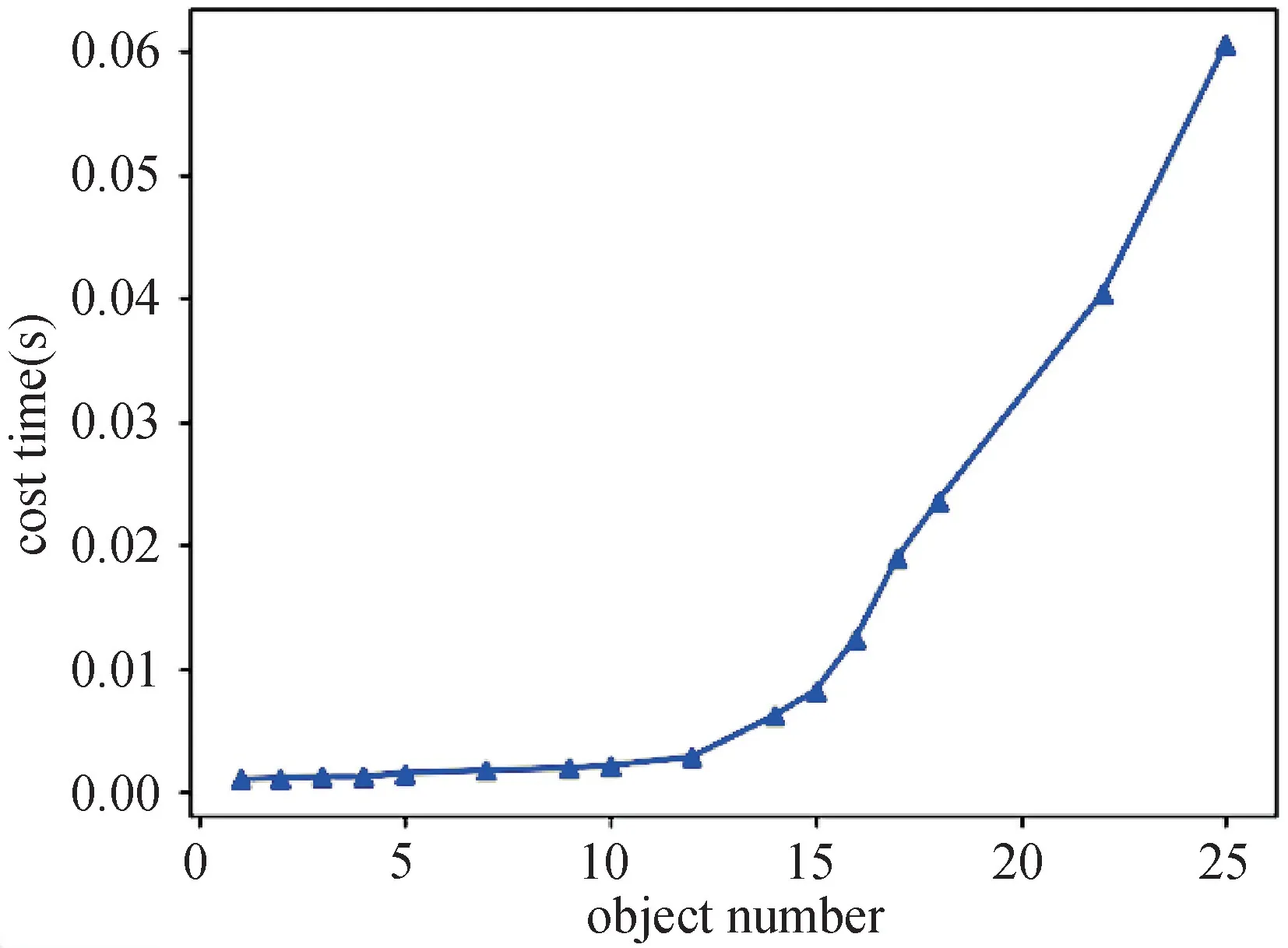
图4 多船舶跟踪方法的时间成本统计
3 结 论
基于AIS和雷达数据融合的多船舶跟踪能够为智能航行和智能航保提供基础技术支持。所提方法利用基于聚类的数据关联、基于Kalman滤波的运动预测与状态更新,在将AIS、雷达数据进行融合的过程中,实现多船舶航迹的在线跟踪。良好天气情况下,以长江某航段为对象,开展了相关实验,结果证明了提出的多船舶跟踪方法在内河航道场景中具有量好的精度和实时性。在未来研究工作中,引入航道航行时空特征以及船舶物理特征因素,构建先验知识为条件的船舶运动预测模型,实现对船舶航迹预测和跟踪的精准掌控。
猜你喜欢
当代陕西(2019年15期)2019-09-02
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
军事文摘(2018年24期)2018-12-26
学苑创造·A版(2018年11期)2018-02-01
中国化妆品(2017年12期)2017-06-27
读者(2017年5期)2017-02-15
小学生导刊(高年级)(2016年11期)2016-11-14
太空探索(2016年7期)2016-07-10