导航综合基带的设计与实现
2022-09-04 06:46张金涛韩双林杨丽云胡正群
全球定位系统 2022年3期
张金涛,韩双林,杨丽云,胡正群
( 1. 卫星导航系统与装备技术国家重点实验室, 石家庄 050081;2. 中国电子科技集团公司第五十四研究所, 石家庄 050081;3. 中国科学院国家天文台, 北京100012 )
0 引 言
中国区域导航定位系统[1-2](CAPS)是以转发式卫星导航原理为基础,利用地球同步轨道卫星[3-4]转发地面主控站生成的信号,并以气压高度计辅助实现的三维实时定位系统[5].
CAPS系统主要由地面运控系统、地球静止轨道(GEO)卫星、地面用户三部分组成. 地面运控系统通过GEO卫星转发方式,将导航信号播发至地面用户,用户利用多颗GEO卫星转发的导航信号实现导航定位. 导航综合基带是地面运控系统主控站核心任务承载平台,在主控站中发挥着重要作用. 导航综合基带完成转发式导航信号的生成,实现导航信号的下行接收,其高精度测量和高可靠通信能力是地面运控系统各项业务正常运行的有力保障。
1 总体设计
导航综合基带,采用软件无线电设计思想,整个设备在标准面向仪器系统的PCI扩展(PXI)机箱内部集成,设备单元采用PXI插卡式板卡结构,实现了通用化和模块化. 导航综合基带由收发基带单元、主控单元、放大滤波合路单元、时频单元、背板等部分组成. 总体框图如图1所示.
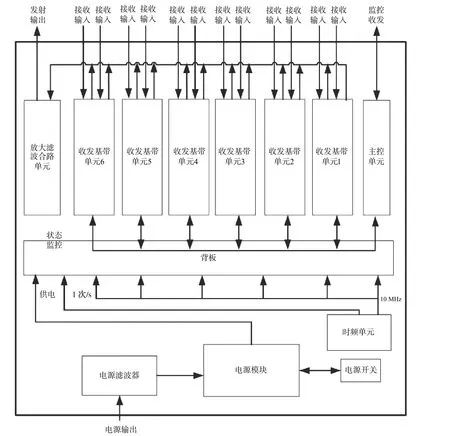
图 1 导航综合基带结构框图
1)收发基带单元设计
收发基带单元是导航综合基带的核心组成部分,每个收发基带单元融合了两路上行信号发射和两路下行信号接收的功能,实现了数字信号的小型化和模块化处理,提高了设备的可靠性和扩展能力.
收发基带单元分为发射工作模块和接收工作模块. 其中,发射工作模块在1次/s时频基准和10 MHz推动下,根据业务监控软件发来的控制参数和上行注入电文进行扩频调制,产生符合系统信号接口定义文件的上行发射信号,每个收发基带输出相同频率的数字中频信号,经过不同频点的本振信号混频后,输出频点可配置的L频段射频信号.
接收工作模块接收来自多通道下变频器送来的中频信号,完成模拟信号的数字化采样,并进行后续的数字信号处理,主要包括导航信号的捕获跟踪、电文解调及解析、伪距测量、载波相位测量、信号电平估计、载噪比估计和多普勒估计等处理,最后送出伪距测量值及解调后的导航电文. 同时完成对自身状态的监视并上报业务监控软件.
2)主控单元设计
主控单元通过PCI总线和网络UDP协议,完成两个方面的功能,一是接收各个单元板卡的状态信息和数据,并汇总上报;二是控制导航综合基带的对外指示灯进行综合状态显示.
3)放大滤波合路单元设计
放大滤波合路单元主要对12路上行信号进行放大滤波,最后进行合路处理,将合路后的信号输出至上变频器.
4)时频单元设计
时频单元主要是给收发基带单元提供1 次/s、10 MHz信号.
5)背板单元设计
背板单元,主要为各模块间提供高速信号互联以及供电等.
2 关键技术
2.1 发射信号频率补偿技术
GEO卫星自身存在一定动态,当卫星转发器将上行发射信号进行转发时,其下行信号不可避免地携带了动态,并且卫星转发器的本振工作频率也存在偏差[6-7],因此卫星发射频率包含了从地面站发射天线到卫星接收天线相位中心的上行多普勒频率和卫星转发器本振频率偏差两个方面的影响[8]. 导航综合基带接收部分监测到这种偏移后,经过数据处理,将这种偏移反置入综合基带发射部分,以补偿频率差[9-10].
导航综合基带发射频率补偿调整在数字域进行,通常通过累加器实现,即调整图2中的载波数字振荡器(NCO)一阶量.
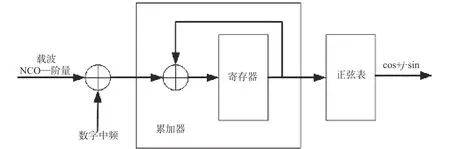
图 2 频率补偿框图
系统时钟(等效于采样时钟)为fs,调整量为fd,对应控制字为M,累加器位长为N,则根据系统时钟、累加器位长、调整量之间的折算关系,有

当M=1 时 ,fd为分辨率 Δf(最小调整步长). 选择累加器位长N为32位,设基带工作时钟为fs=82MHz ,则根据式(1),当M=1 时,其最小调整步进Δf=0.02Hz.
使用累加器的低24位(高位为符号位,低位23位为数据位)进行发射载波中心频率调整,则根据式(1),计算fd正负向调整范围为

可以根据需要对累加器的位数进行选取,适应不同的调整范围的需求.
2.2 导航信号高精度接收技术
高精度接收作为导航综合基带的核心业务功能之一,通过合理高效的数字信号处理算法的设计,实现对转发式导航信号的快速稳定捕获跟踪,获得高稳定高精度的伪距、多普勒、载噪比等观测数据[11-13].
1)导航信号快速捕获技术
综合考虑转发式导航信号的特点,采用并行频率搜索和并行码相位搜索两种方法实现信号的快速捕获[11-13]. 信号捕获过程分为两个步骤:第一步,应用并行码相位搜索算法,实现码相位捕获和多普勒频移粗捕,可获得误差小于等于0.25码片的码相位估计值和较粗糙的多普勒频移估计值;第二步,采用并行频率搜索算法实现多普勒细捕,多普频勒移估计的误差约为20 Hz.
2)导航信号环路跟踪技术
导航信号跟踪过程主要分为载波跟踪和伪码跟踪. 对于载波跟踪,采用2阶锁频环(FLL)辅助3阶锁相环(PLL)的方式, 先用FLL处理相关信号,当FLL跟踪稳定下来后,由FLL来跟踪载波多普勒频移,并对PLL环路进行辅助,使载波跟踪环路在低动态情况下具有PLL精确跟踪的特性,而在较高动态性情况下又具有FLL稳定锁定信号的能力,并且能快速重捕和牵引,可以满足转发式导航信号的动态需求. 对于伪码跟踪采用了传统的2阶延迟锁定环(DLL),其主要由延迟锁定鉴别器、码环滤波器、码NCO三部分组成.
2.3 设备高稳定时延保持技术
设备高稳定时延保持技术,以保证信号在设备链路中的传播时延稳定性为目的. 在设备研制过程中通过设备高稳定性设计、环境稳定性精密监测与控制等措施的综合应用,达到高稳定链路时延保持的技术需求[14-15].
1)设备高稳定性设计
设备的高稳定性设计,是在设备元器件、板卡设计、机箱设计、连接线缆等多个环节均采取技术手段保证设备性能的可靠稳定. 从信号产生到信号测量,每一个环节都经过严格控制,确保时延的稳定性. 在设备生产前,对元器件进行老化筛选及老化试验,选取抗老化性能好的器件;优化板卡设计,增大板卡的散热面积,保证芯片的充分散热;对机箱进行热设计,合理分配机箱内设备布局,减少机箱内温度变化;机箱内部和板卡间使用温度系数较低的稳相电缆.
2)机箱温度监测与控制设计
通过机箱内核心板卡设置温度监测芯片,实现机箱的温度监测,通过控制风扇的不同转速对机箱的温度进行控制. 将所监测到的温度信息,进行处理分析,监测机箱风扇是否异常. 通过长时间统计分析温度监测信息,分析温度对设备时延的影响. 基于数据分析手段实现对收发设备时延的建模和修正.
3 测试结果
导航综合基带的性能指标测试结果如表1所示,测试结果优于设计要求和应用需求. 导航综合基带发射载波中心频率可调范围优于±160 kHz,能够满足发射信号频率补偿的需求,伪距测量精度优于0.20 ns,通道时延稳定度优于0.25 ns.
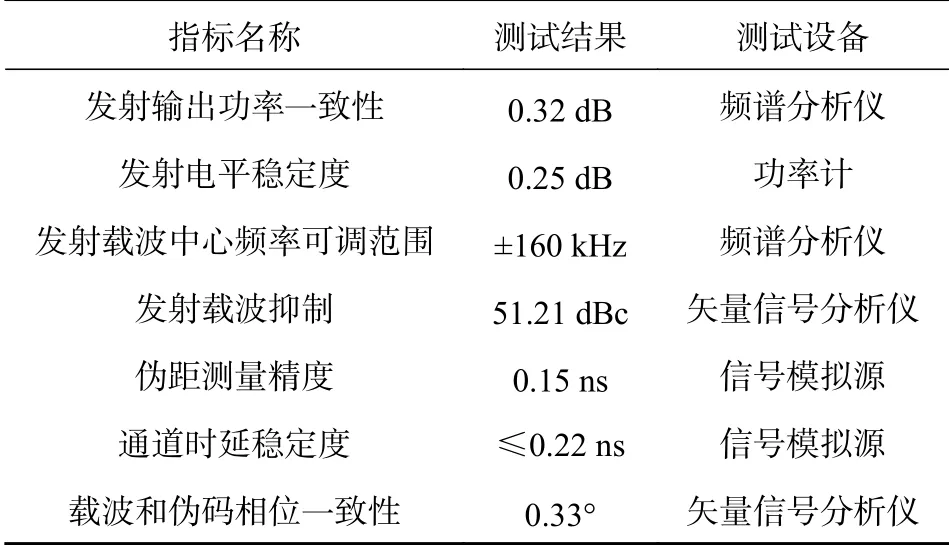
表 1 导航综合基带测试结果
其中,通道时延稳定度测试包括24 h静态时延测试和3次开关机测试. 信号模拟源发射合适大小信号,导航综合基带接收稳定后,连续采集24 h数据;再将导航综合基带设备关机10 min,待开机接收稳定后,连续采集2 h数据;再重复开关机2次. 数据处理如下:
假设第i个时刻的伪距值为zi,把所有zi每100点分为一组,共分成M组数据,每组数据分别进行统计,得到M组z的统计值


则时延稳定度为将24 h静态时延测试和3次开关机进行联立获得总的时延稳定度的测试结果,如表2所示,某通道时延稳定度测试结果为0.20 ns. 图3为某通道24 h静态时延测试结果图.
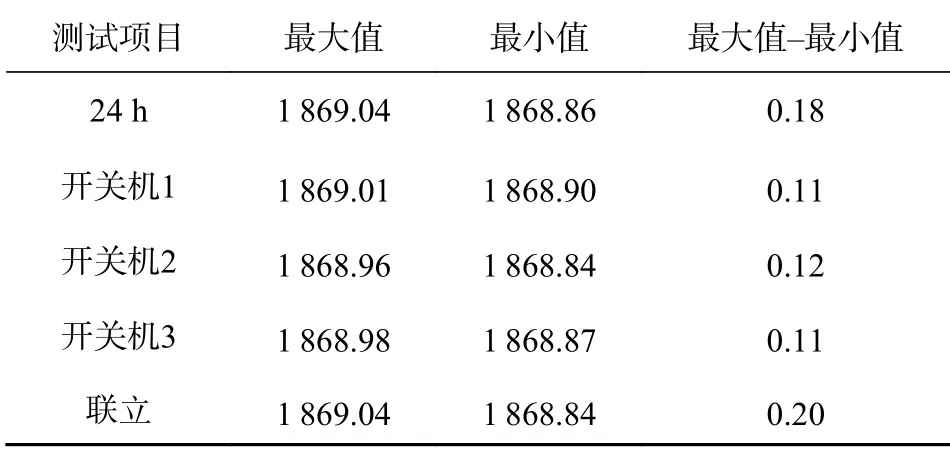
表 2 通道时延稳定性测试结果 ns
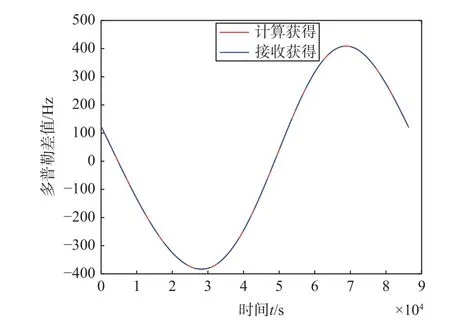
图 3 实验稳定性测试24 h测试数据图
4 实验验证
2020年,导航综合基带设备完成进场装站调试,并与信道设备、天线设备等一起运行. 如图4所示,设备安装在室外恒温机柜内.
利用导航综合基带发射并接收经GEO卫星转发器转发的导航信号,使信号传输构成闭合环路,形成大环伪距值. 使用的转发器为亚洲3S卫星C转发器,上行信号频率为6 265 MHz,下行信号频率为4 040 MHz. 图5所示为2021年1月13日大环伪距值,存在类正弦变化趋势,振幅约为2.68 ms,中心点约为255.05 ms. 图6所示为大环伪距双差值,24 h内最大伪距双差值约为0.033 ns/s2,最小双差值约为-0.036 ns/s2,一方面说明GEO卫星运动加速度小,另一方面也说导航综合基带伪码测量精度高.

图 4 设备部署图
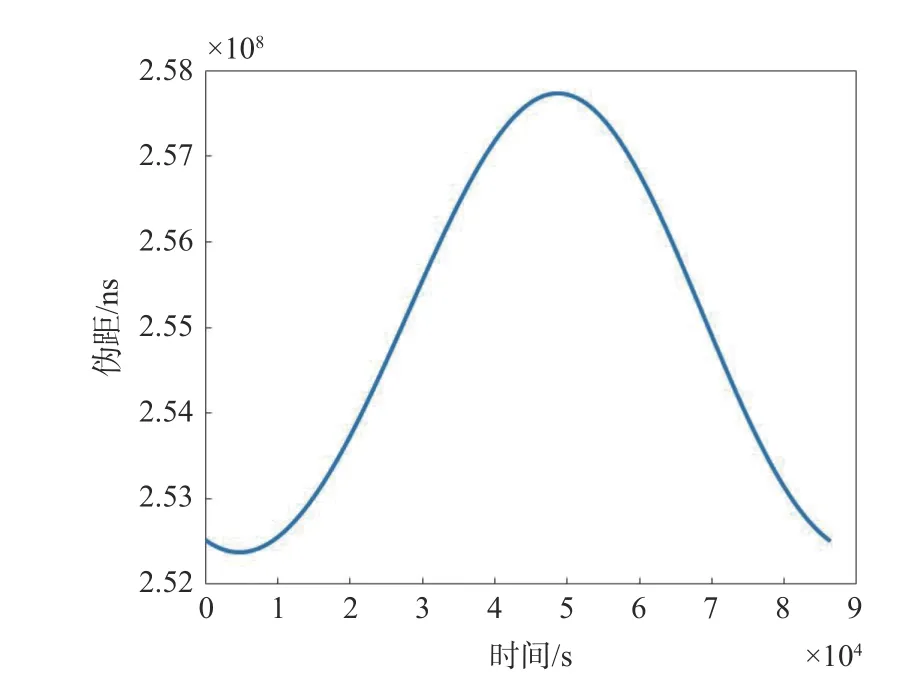
图 5 大环伪距值图
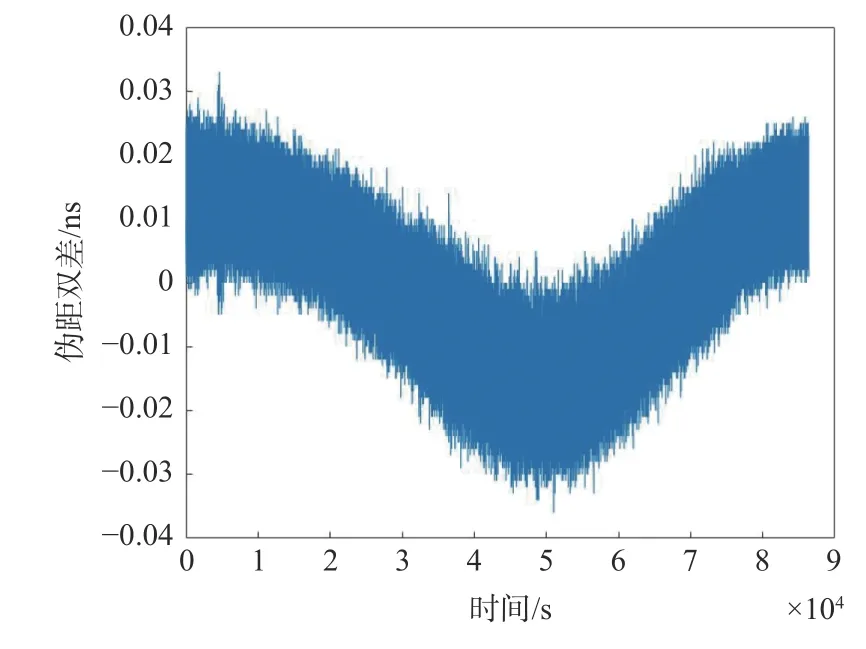
图 6 大环伪距双差图
因为导航综合基带以及信道设备采用同一基准频率源作为参考输入,消除了因频率基准精度不同带来的测量误差,所以可以获得更高的测量精度.
1)利用大环码伪距变化率可以计算卫星相对于地面站的径向运动速度及多普勒系数,获得下行多普勒频率;
2)同时通过导航综合基带自大环可以获得总的频偏;
3)利用总的频偏值减去获得下行多普勒频率就可以获得需要补偿频率差.
图7为2021年1月13日导航综合基带自大环获得的总频偏,导航综合基带发射端没有进行频率补偿,可以看见有4 kHz左右固有频偏,并且存在幅值约为1 000 Hz 的类正弦变化趋势.
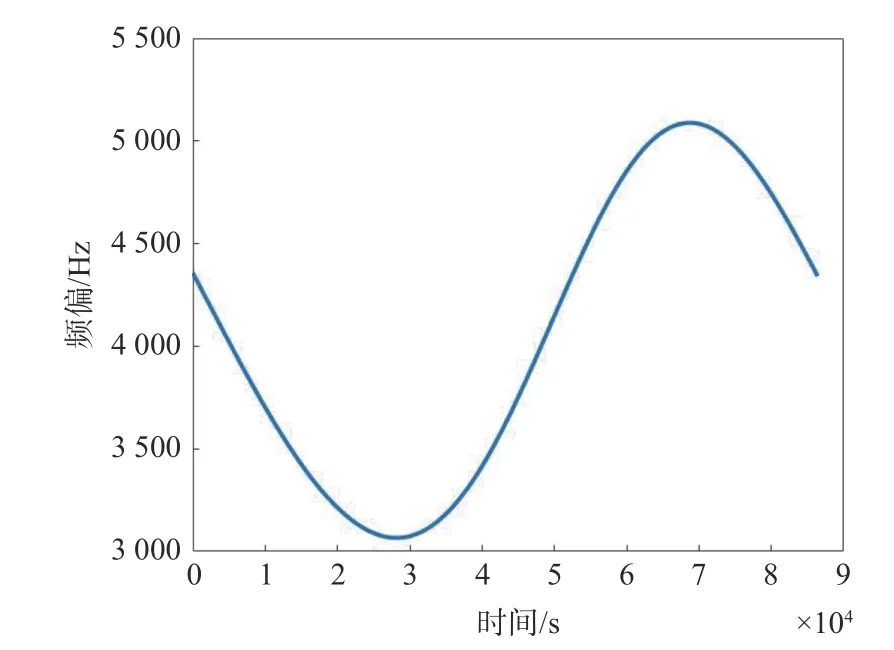
图 7 总频偏图
导航综合基带发射端进行频率补偿后,接收端获得的大环频偏,即补偿了上行多普勒频率和卫星转发器本振频率偏差两个方面的影响后,只有下行多普勒的值. 同样,利用卫星轨道参数、地面站坐标、下行频率等计算可以获得的下行多普勒. 图8为2021年1月14日,两种不同方式获得多普勒对比图. 由图8可知,两种曲线几乎完全重合在一起. 图9为两种方式获得的下行多普勒的差值,24 h内差值最大约0.6 Hz. 该差值既包含了卫星轨道参数等误差,也包含了导航综合基带的频偏估计误差和频偏补偿误差.该结果表明频偏补偿误差小,优于0.8 Hz.
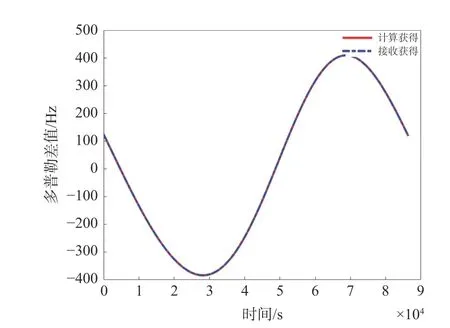
图 8 下行多普勒对比图
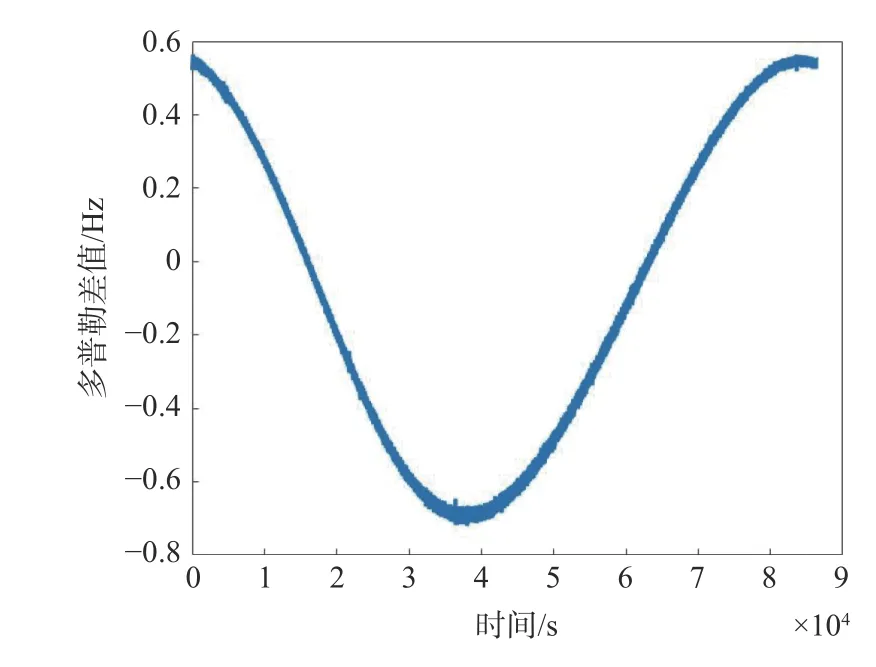
图 9 下行多普勒差值图
5 结束语
导航综合基带实现了12个频点的转发式导航信号的上行发射、导航电文播发及对相关参数的改正,完成12个频点的导航信号的下行接收,实现伪距测量,时延测量修正,设备零值校准.
导航综合基带能够进行发射信号频率补偿,完成高精度导航信号接收,实现高稳定的实验保持,有力地保障了地面运控系统各项业务正常运行,满足了转发式导航系统需求,其成果可推广应用于其他卫星导航系统.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中国电子报(2019年55期)2019-10-24
电脑报(2019年8期)2019-09-10
通信产业报(2019年26期)2019-08-30
微型计算机(2016年3期)2016-03-16
物理教学探讨(2014年5期)2014-09-18
现代计算机(2009年9期)2009-12-02
微型计算机(2009年9期)2009-05-19
微型计算机(2009年17期)2009-05-19