基于最近电平逼近调制的IGBT开路故障诊断方法
2022-09-03 05:53荣飞孙克强
湖南电力 2022年4期
荣飞,孙克强
(湖南大学电气与信息工程学院,湖南 长沙 410082)
0 引言
由于“碳达峰、碳中和”目标的提出,“十四五”期间以风力发电为代表的新能源发电技术仍将继续快速发展,装机容量和发电量占比仍将持续提高。随着风电装机容量的不断攀升,多电平变换器成为风机并网研究的热点[1-4]。
文献[5]提出了一种新型六边形模块化多电平变流器(H-MMC)并阐述了其工作原理。HMMC只使用6个桥臂直接连接两个不同频率和电压幅值的三相交流系统,大大降低了设备体积和生产成本。文献[6]采用双pr控制跟踪两种频率的电流,实现风机最大功率跟踪控制,利用环流和中性点电压实现无功平衡。多电平变换器全桥子模块(FBSM)中IGBT频繁开通和关断,使得IGBT容易发生短路或开路故障。IGBT短路故障需要在10μs内完成故障检测并关断IGBT,以避免直通故障,所以短路故障一般都由硬件电路完成检测及实施保护。开路故障不会导致系统立刻崩溃,但会使电流失真,甚至其他组件发生二次故障。因此故障诊断定位技术能够提高系统可靠性[7-10]。
文献[11]采用简单硬件电路检测子模块运行工况结合驱动信号快速完成故障诊断。文献[12]提出了一种利用栈式稀疏自动编码器作为学习网络,利用深度学习方式分类、提取原始故障数据特征,输入Softmax分类器得到故障分类结果。文献[13]运用小波包分解(WPD)与主成分分析(PCA)的方法,提取子模块电容电压为故障参量,利用改进的BP神经网络实现故障定位。文献[14-15]高度依赖大量历史数据进行训练,计算成本很高,增加了控制器计算负担,在线实现困难。文献[16]提出了一种基于自适应观测器的故障检测方法。文献[17-19]采用卡尔曼滤波器理论,将预测估计值与检测值进行比较,判断IGBT是否发生开路故障,但是设计过程较为复杂且计算量比较大。
综上所述,本文对全桥子模块中IGBT开路故障特性进行分析,提出基于NLM调制策略的IGBT开路故障诊断定位方法。根据NLM调制策略对子模块电容电压采样值的排序,计算其中位数作为同一桥臂子模块电容电压预测值,与实测值对比,获得诊断判据,在诊断出FBSM发生故障后,改变FBSM工作状态,根据子模块电容电压值的变化进行故障IGBT定位。
1 全桥子模块结构与工作原理
全桥子模块结构如图1所示,T1—T4为可关断器件(IGBT),D1—D4为反并联二极管,UC为子模块电容电压,ip为输入电流。通过改变FBSM四个IGBT的开关信号,可以控制FBSM输出3种工作状态。

图1 全桥子模块示意图
1) 正投入:T1=1,T2=0,T3=0,T4=1(“1”为IGBT导通,“0”为IGBT断开),输出电压为+UC。
2)负投入:T1=0,T2=1,T3=1,T4=0,输出电压为-UC。
3)切除:T1=1,T2=1,T3=0,T4=0或T1=0,T2=0,T3=1,T4=1,输出电压为0。
调制策略采用最近电平逼近调制策略(NLM)实现子模块电容电压平衡控制,桥臂投入子模块个数Num为:

式中,round为四舍五入取整函数;Ucref为FBSM电容电压参考值,V;uref为桥臂参考电压,V。
Num为正时FBSM正投入,Num为负时FBSM负投入,跟据ip方向和子模块电容电压排序结果,选择性投切子模块,实现子模块电容电压的平衡[20]。
2 故障特性诊断定位方法
2.1 故障特性分析
FBSM中IGBT开路故障分为以下3种:正投入状态下发生故障;负投入状态下发生故障;切除状态下发生故障(以下简称“正投入故障”“负投入故障”“切除故障”)。IGBT开路故障运行状态见表1。

表1 IGBT开路故障运行状态
1)正投入故障:当ip>0时,FBSM正常运行;当ip<0时,T1或T4发生开路故障,FBSM电容放电失败,FBSM电容电压值保持不变。
2)负投入故障:当ip>0时,T2或T3发生开路故障,FBSM电容放电失败,FBSM电容电压值保持不变;当ip<0时,FBSM正常运行。
3)切除故障:当ip>0时,T2或T3发生开路故障,FBSM电容切除失败,电容充电造成电压值快速升高;当ip<0时,与T1或T4发生开路故障时同理。
2.2 故障诊断方法
由故障特性分析可知,IGBT开路故障对系统产生影响,都发生在桥臂子模块放电周期。故障FBSM电容电压值UC会因放电失败保持不变或切除状态下充电使FBSM电容电压实际值高于正常工作状态下UC。因此可以通过监测FBSM实际UC与期望电压值的差异程度,当差值超过所设定阈值β时,判定该FBSM发生故障。
根据NLM调制策略的原理可知,采用NLM调制策略可以使同一桥臂各FBSM的UC保持高度一致。因此可以利用NLM调制策略对子模块电容电压值的排序,计算其中位数作为FBSM期望电压值α,不需要占用过多的计算资源。
在单个NLM调制周期内,FBSM的UC最大变化量为ΔUC:

式中,C为FBSM电容容值,F;ibmax为桥臂电流最大值,A;T为NLM调制周期,s。
根据NLM调制原理建立模型模拟计算过程,NLM模型计算流程如图2所示。将N个FBSM电容电压赋不同的初始值,模拟电容充电C次的过程对电容电压从小到大排序,相对较低电压的An个电容充电值设为Kn;模拟电容放电H次的过程对电容电压从大到小排序,相对较高电压的Bn个电容放电值设为Pn;计算每一次电容电压排序后最大值与最小值的差值并记录,图中函数rand为在输入的数值区间内随机生成一个整数,UCi(i=1,2,…,N)由小到大或由大到小排序后重新按i=1,2,…,N的顺序赋值完成加或减运算,函数max为求取数值的输入数值的最大值。
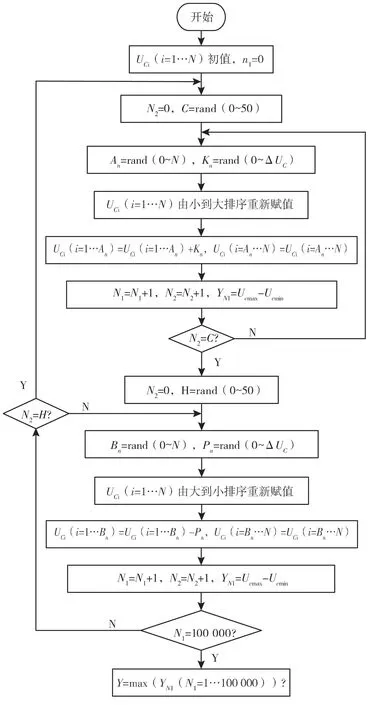
图2 NLM模型计算流程
根据流程图2进行仿真,设置N=40、UCi(i=1,2,…,N)=100±20、ΔUC=5,得到仿真波形如图3所示。N1为计算次数,从图中可以看出UCi(i=1,2,…,N) 最大值Ucmax和最小值Ucmin的差值Y为:

图3 NLM调制最大差值波形

因此考虑噪声、裕度等因素选取阈值β:

FTSM故障诊断流程如图4所示,同一桥臂FBSM电容电压值经NLM调制排序后,计算出期望电压值α,各电容电压值依次与α做差,当差值超过所设定阈值β时,判定该子模块发生开路故障。为了避免噪声干扰造成误判断,当故障信号产生并持续周期数大于z(z=5)时,判断该FBSM发生故障,进入IGBT开路故障定位环节。
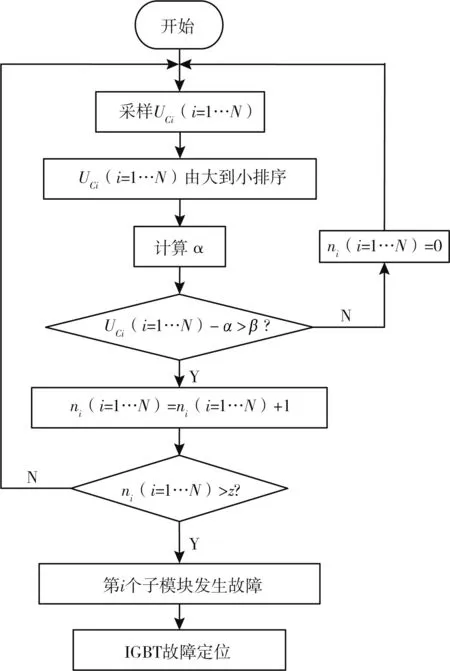
图4 FTSM故障诊断流程
IGBT故障定位流程如图5所示。图中,F1、F2、F3、F4分别为T1、T2、T3、T4的故障诊断信号,其值为1表示IGBT故障,其值为0表示IGBT正常。iarm为故障桥臂电流,UC(k-1)为诊断出故障FBSM所在控制周期的电容电压值,UCk和UC(k+1)为改变子模块为切除状态后下一控制周期故障FBSM的电容电压值。

图5 IGBT故障定位流程
由故障特性分析可知,正投入故障只发生在iarm<0时,负投入故障只发生在iarm>0时。因此可以通过FBSM发生故障时桥臂电流方向来缩小发生故障IGBT的范围。同时,根据IGBT故障造成FBSM的UC快速升高作为判别依据,实现故障IGBT的定位。
3 容错控制
全桥子模块三种运行模式,当一种运行模式发生开路故障时,只使用另外两种运行模式,改变NLM排序方式实现容错控制。其中T1或T2发生故障时,切除状态触发T3和T4;T3或T4发生故障时,切除状态触发T1和T2。
根据上述分析,如图6所示,UCF为故障FBSM电容电压值,UCi(i=1,2,…,N-1)按照升序排列。以发生负投入故障为例(正投入故障同理):在正投入周期内,按照正常NLM调制策略进行调制;在负投入周期和iarm>0时,UCF不参与排序,投入子模块电容电压值最高的k个FBSM,故障FBSM一直保持切除状态;iarm<0时,UCF排序在最后,投入子模块电容电压值最低的k个FBSM,只在子模块需要全部投入时,投入FBSM进行短暂的充电。

图6 故障容错控制的NLM排序
4 仿真分析
在Matlab/Simulink软件中搭建了基于H-MMC的风机并网系统的仿真模型验证IGBT开路故障诊断策略,设置仿真时间1s时,桥臂1中第一个FBSM开关管T1发生开路故障。仿真参数见表2。

表2 仿真参数
4.1 故障诊断与定位仿真分析
桥臂电流波形如图7所示,仿真运行在1~1.034 s时,桥臂电流为ip>0;当仿真运行到1.034 s时,ip<0并运行在正投入周期。

图7 桥臂电流波形
子模块电容电压波形如图8所示,仿真运行在1~1.034 s时,由于ip>0,开关管T1发生开路故障,但是故障特性并没有显现,各FBSM的电容电压值保持高度一致。当仿真运行到1.034 s时,ip<0并运行在正投入周期,第一个FBSM电容电压UC1因放电失败保持不变,故障特性开始显现,验证了前文IGBT开路故障特性分析。仿真运行到1.039 s时,电容电压UC1与桥臂子模块电容电压中位数差值超过设定阈值,完成对故障子模块的诊断。故障特性显现至诊断完成,时间小于4 ms,相较于文献[17]故障诊断速度较快。同时进入故障定位模式,将IGBT驱动信号设置为T1=1、T3=0、T2=0、T4=0后,UC1再次升高,判别T1为故障开关管,完成故障定位。
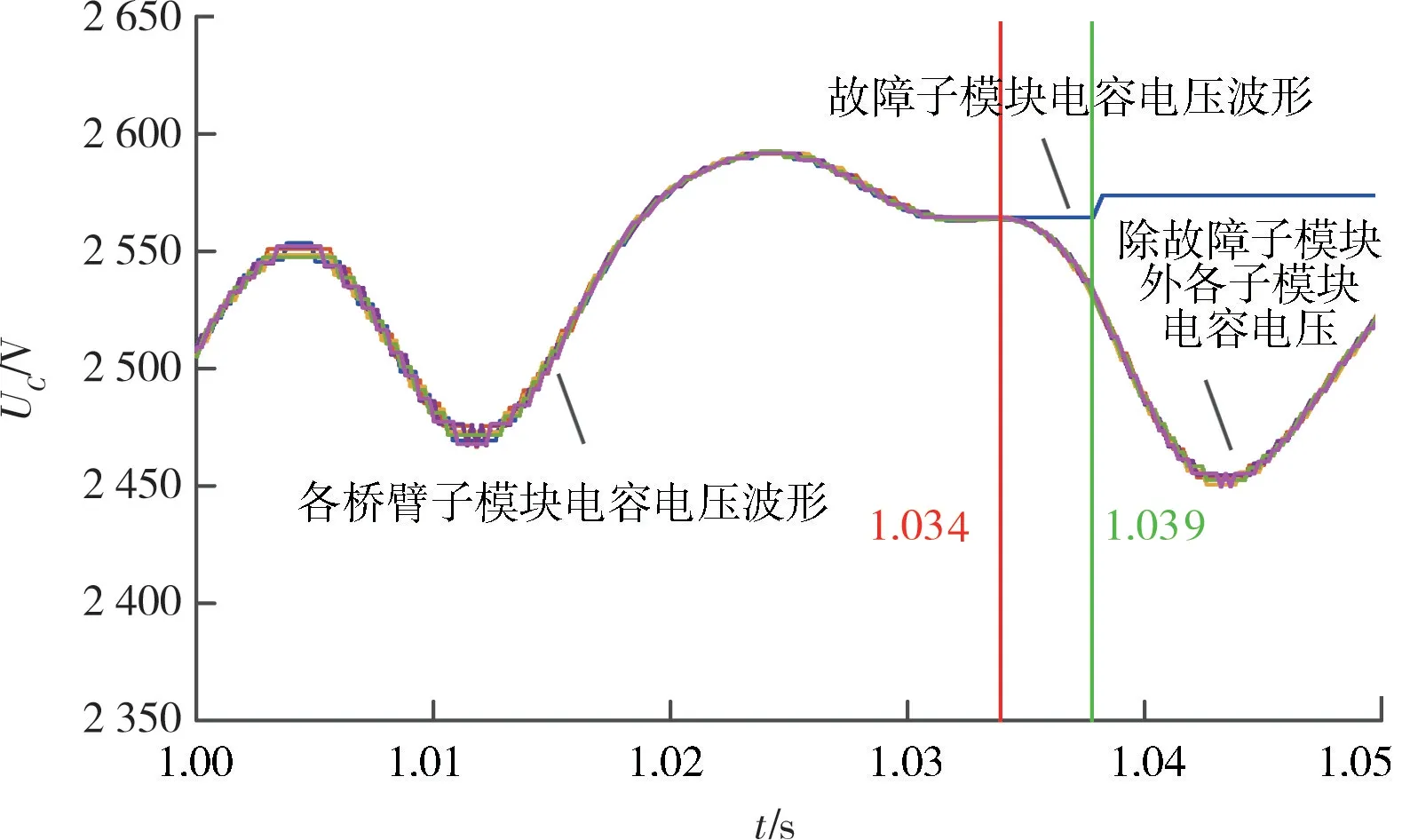
图8 子模块电容电压波形
4.2 容错控制仿真分析
未采用容错控制电容电压仿真曲线如图9所示,发生开路故障后未采用容错控制,故障子模块的电压快速上升,极易造成其他组件二次故障。

图9 未采用容错控制电容电压仿真曲线
采用容错控制电容电压仿真曲线如图10所示,当故障诊断和定位后,采取容错控制,故障子模块正负投入运行模式转变为单一运行方式,电容电压仍然能够保持平衡。子模块电压波动范围增大,波动率维持在5%以内。故障子模块电容电压在正常投入时可以快速跟踪上桥臂各子模块电容电压,当强制切除时,电容电压保持不变。

图10 采用容错控制电容电压仿真曲线
5 结语
本文针对全桥子模块IGBT开路故障特性进行分析,提出根据子模块电容电压值中位数与电容电压实测值的差值作为诊断判据的故障诊断方法,该方法不需要占用过多的计算资源,同时能够快速地实现故障诊断。提出故障子模块诊断后,改变FBSM工作状态,根据子模块电容电压值的变化进行故障IGBT定位的方法,能够快速定位子模块故障IGBT。给出了将故障子模块正负投入运行模式转变为单一运行方式的容错控制策略。仿真验证了对IGBT开路故障特性的分析和所提出故障诊断与定位方法和容错控制策略的有效性。
猜你喜欢
中风与神经疾病杂志(2022年7期)2022-09-01
电源学报(2022年2期)2022-04-19
建材发展导向(2021年7期)2021-07-16
电子制作(2021年11期)2021-06-17
名家名作(2021年4期)2021-05-12
科普童话·学霸日记(2020年1期)2020-05-08
电力大数据(2020年8期)2020-02-05
青年歌声(2019年2期)2019-02-21
小天使·一年级语数英综合(2019年2期)2019-01-10
电子制作(2017年23期)2017-02-02