面向测图的无人机载LiDAR应用研究初探
2022-09-02 02:20:54郝思宝孙磊于婷婷
城市勘测 2022年4期
郝思宝,孙磊,于婷婷
(江苏省地质测绘院,江苏 南京 211102)
1 引 言
机载LiDAR系统采用非接触式测量方式,具有安全、高效、准确等特点[1],机载LiDAR生成的点云数据信息量大、信息种类丰富,已经成功应用于DEM生产项目中[2,3]。
近年来,随着技术的发展,以无人机为载体的LiDAR系统日益成熟,无人机载LiDAR系统融合了无人机、三维激光扫描、GNSS以及IMU等新型技术手段,凭借其机动灵活、采集高效等特点,被越来越多的应用于 1∶500地籍,1∶500、 1∶1 000地形大比例尺测图项目中[4,5],成为有效的地理空间数据获取手段。如何根据项目应用特点,获取满足大比例尺测图生产要求的数据,是推动无人机载LiDAR技术深入应用亟须解决的问题。
2 测图生产对点云数据的要求
目前,针对机载LiDAR数据生产与成果的技术要求,已发布了多个规范与规程。以CH/T 8024-2011《机载激光雷达数据获取技术规范》(以下简称《技术规范》)为例,它包括了机载激光雷达数据获取基本要求,从技术准备、飞行计划与实施、数据预处理、数据质量检查、成果提交等方面做了规定。
但是,现有相关技术规范主要针对传统航测机载LiDAR设备,飞行器一般为有人驾驶的航测飞机,数据主要为DEM生产服务。而针对无人机载LiDAR系统,面向测图生产应用的相关技术要求尚未有统一规定。由于设备类型及应用需求的不同,此类成果数据在点云的密度、覆盖完整性和精度等技术指标要求与现有规范标准必然存在差异,应从测图生产需求出发,明确生产和成果的技术质量要求。
2.1 点云密度
点云密度是指单位面积内激光点的个数,是刻画点云精细度的重要指标。不同点云密度呈现物体的细节特征存在差异,从而对测图成果的完整性和精度产生影响。另一方面,点云密度对数据采集处理效率有重要影响。在生产时,应综合考虑点云精度、采集效率、处理时间等多方面因素,选择合适的点云密度指标。
《技术规范》中,从面向DEM生产需求的角度对不同比例尺分幅图的点云密度进行了规定,其中 1∶500点云密度每平方米不少于16个点,1∶1 000点云密度每平方米不少于4个点[6]。由于生产目的不同,《技术规范》规定的点云密度无法满足测图需求。为确定不同比例尺测图对点云数据密度的要求,本文进行了实验。实验中,首先选取包含典型地物的区域,对该区域进行高密度点云数据采集(超过300点/m2);接着,设置不同的点间距对点云抽稀,得到相应密度的点云数据。不同密度的点云数据如图1所示。
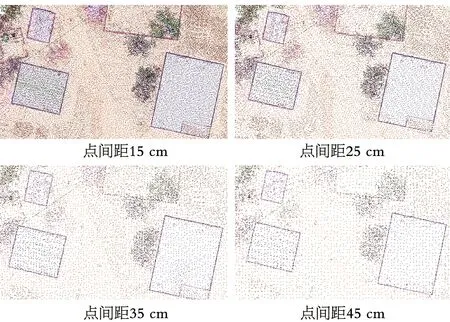
图1 不同密度的点云数据
安排同一技术人员,以不同密度的点云数据为基础,进行测图作业。从测图对象的辨识度、测图完整度以及成果精度等方面对点云的适用性进行评价,最终总结出各类项目点云密度要求如表1所示:
表1 面向测图的点云密度要求
需要注意的是,在明确点云密度要求的同时,应保证点云均匀分布,避免出现整体满足密度要求,但局部点云密度不达标的情况。
2.2 覆盖完整性
覆盖完整性描述了待测对象在点云数据中的完整程度。不同项目的待测物体不同,对覆盖完整性要求也有所不同。面向DEM生产时,点云覆盖完整性主要针对地面点而言,而在面向测图生产时,点云数据覆盖完整性不应简单理解为在正射视图下地表点云覆盖是否完整,而是要看被测对象的覆盖完整性。如在地形地籍项目中,即使正射俯视图点云覆盖度很高,但建筑墙体和植被下地面点覆盖不完整,也会对测图产生不利影响。不同重叠度的点云数据完整情况如图2所示。
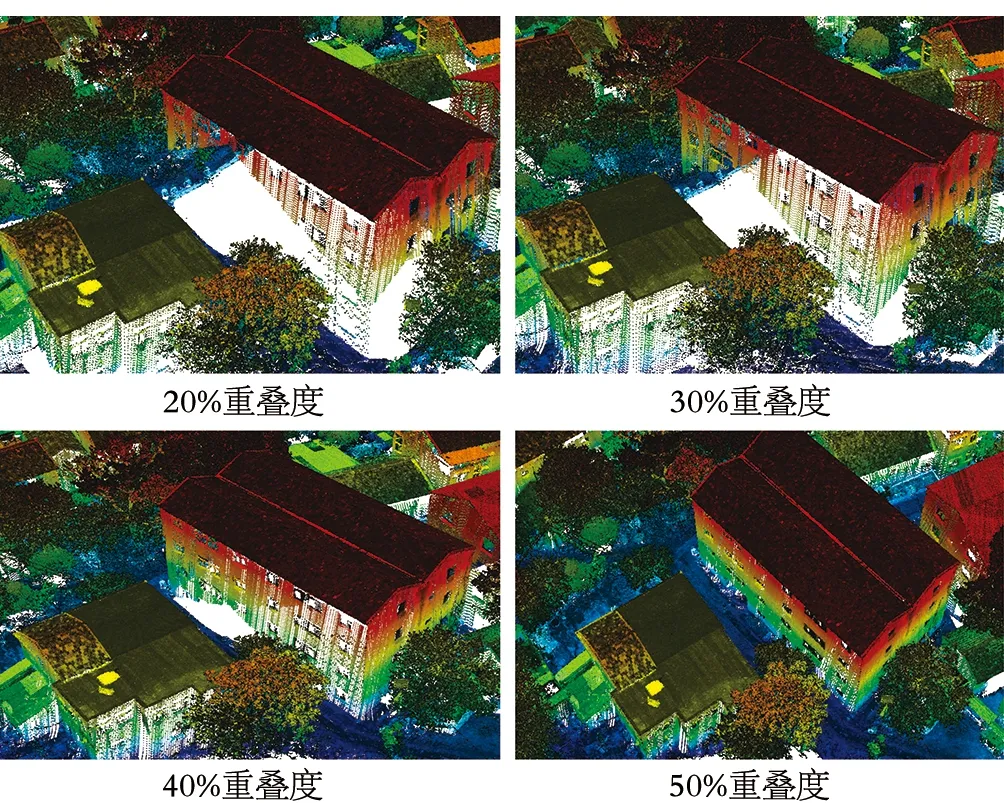
图2 不同旁向重叠度的点云数据
在无人机载LiDAR生产航飞设计中,通常采用增加旁向重叠度和设计井字交叉航线的方法提高点云覆盖完整性。上图描述不同旁向重叠度的点云数据情况,由图可知,当旁向重叠度小于30%时,房檐下的墙体不完整,无法准确绘制。通过实验验证与项目生产,本文认为在大比例尺测图项目中,应设计井字航线,同时航线旁向重叠度达到50%或以上,最小不低于40%,确保成果能够满足要素覆盖完整性要求。
2.3 点云精度
《技术规范》中规定了点云数据的高程精度,未对平面精度作要求。大比例尺测图项目中,需对平面精度和高程精度均作出规定。高程精度可参照《技术规范》,平面精度应根据项目类型,参考相应技术规程执行,其中点云的点位中误差和间距中误差不应低于对应技术规范和标准中的相应要求。
由于点云离散的特点,很难准确地找到检测点所对应的激光脚点,在评定点云精度时,采用如下方法:
(1)平面点位精度
检查平面点位时,通常选择具有空间立体特征的规则地物边界或拐角(如房屋拐角,门墩)等点位作为平面检查点[7]。采用GNSS或全站仪采集相应点位获得平面坐标,将点位展绘至点云正射底图上,通过量取真实点位与检查点的平面坐标差值,评价平面点位精度。
(2)高程点位精度
检查高程点位时,一般选择平坦的水平面(如:操场、房前空地等)。外业采用GPS或全站仪采集高程点位,在精度要求较高的生产项目中,可采用水准仪采集点位[7]。
在检测时,需要分析误差产生原因:是由于点云数据质量还是因为在采集造成的,避免产生错误结果。
3 无人机载LiDAR航飞设计
明确点云数据的质量要求后,需研究航飞设计的相关参数对点云质量元素的影响,进行高效、合理的航飞设计。
3.1 航飞参数
(1)扫描频率与最大测距
扫描频率PRR(Pulse Repetition Rate)指的是激光脉冲发射频率,发射频率越高在单位时间内发射的激光点数量越多,因此也有厂家将扫描频率称为扫描速度。理论上,扫描频率(PRR)与扫描最大测距(D)成反比例关系,以RIEGLVUX-1UAV为例,脉冲发射频率与最大测距关系如表2所示。

表2 VUX-1UAV脉冲发射频率与测距关系
最大测距与航高及视场角有关,对精度有重要影响。在航飞设计时,应首先确定最大测距,在此基础上选择与之适应的扫描频率。在点云处理时,还会在最大测距范围内,设置滤波距离,以进一步确保点云质量。
(2)视场角(FOV)
视场角是指扫描范围边缘与扫描激光头构成的夹角。扫描频率与视场角决定了有效扫描点数,视场角与扫描有效点数的关系为:
有效点数=PRR*FOV/360
理论上,扫描频率确定的情况下,视场角越大,有效点数越多。但是,在实际作业时,当视场角过大,会造成测距过远,易产生点云噪声,影响质量。因此,在无人机载LiDAR测图生产项目中,视场角通常不大于120°。
(3)飞行高度
飞行高度又称航高,是航线设计中最重要的参数。飞行高度对扫描成果精度与飞行效率有重要影响。通常情况下,飞行高度越高,效率越高;而飞行高度与点云成果的误差呈线性关系[8],飞行高度越高,误差越大。此外,飞行高度对点云覆盖完整性也会产生影响。因此,需要平衡成果质量与生产效率的关系,设计合适飞行高度,在满足精度要求的前提下,提高效率。
(4)扫描线速度与航飞速度
对于旋转镜扫描仪而言,扫描线速度即指扫描仪每秒钟旋转的圈数,由于扫描仪每旋转一圈出现1条扫描线,因此,扫描线速度可看作每秒钟形成扫描线数量。航飞速度是指无人机沿航向方向的飞行的速度。
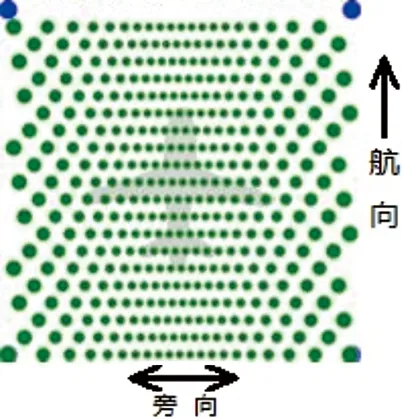
图3 扫描脚点在不同方向分布示意
在无人机LiDAR系统中,扫描的方向与航飞方向保持垂直。根据扫描原理可知,扫描线速度与每条扫描线上的点数成反比,与旁向点间距成正比。而在扫描线速度恒定的前提下,航飞速度与航向点间距成正比。因此,扫描线速度与航飞速度共同影响扫描点在航向和旁向的分布。通过改变航飞速度和线速度,可调整航向与旁向点距大小,确保点云均匀分布。
3.2 航飞参数对点云质量的影响
(1)点云密度
点云密度指的是单位面积内扫描点数,理论上,通过计算单位时间内发射的点数与地面扫描带所覆盖范围的面积,即可得到点云密度。
在扫描频率(PRR)和视场角(α)确定后,可以确定单位时间内的有效扫描点。飞行速度(V飞)和扫描带宽度(W)又可计算单位时间内的扫描面积,扫描带宽度可通过航高与视场角计算得到,由此可确定点云密度(B)公式如下:
上述公式可知,对于单条航线,点云频率、视场角、飞行速度以及航高对点云密度均产生影响。需要注意的是,在实际作业计算点云密度时,需要考虑航带重叠的影响。
(2)旁向重叠度
旁向重叠度可以看作是相邻航带对应地面扫描带的重叠部分与整个扫描带的比值。航带重叠如图4所示。
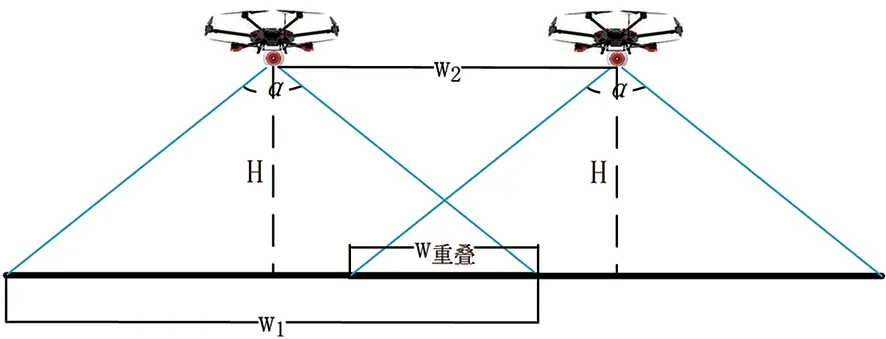
图4 航带重叠示意
由上可知相邻航带重叠部分宽度W重叠为地面扫描带宽度W1与航宽W2的差值。
W重叠=W1-W2
旁向航带重叠度为:
由此可知,通过航高、航宽以及视场角可以计算重叠度,可通过改变这些参数以调整旁向重叠度。
(3)点云精度
无人机载LiDAR系统是由扫描仪、IMU和GNSS等多种设备集成而成,其测量精度必定受各组成部分的综合影响[9],而距离和角度是影响这些设备精度最重要的因素。反映在航飞参数上,扫描视场角,航飞高度等均对精度产生影响:扫描视场角越大,点云的误差越大;飞行高度越高,定位误差越大[10]。此外,点云成果的精度还会受飞行速度、飞行器稳定性、飞行时天气状况以及测区电磁状况等多种要素的综合影响。应通过实验对比验证,比较不同方案中,点云的精度情况,从而为方案选用提供。
3.3 航飞设计步骤
在实施无人机LiDAR项目时,应根据项目特点和质量要求,设定航飞参数。其设计按如下顺序确定技术参数:
(1)确定成果质量要求
根据项目要求,明确点云成果的密度、覆盖完整性以及精度等质量要求。
(2)设定航飞参数
参考上文中航飞参数相关分析结论,设定最大测距、扫描频率、滤波距离、视场角、扫描频率、航飞速度等参数。
(3)设计航飞线路
以设定好的航飞参数为基础,设计航飞线路。在航飞设计中,应规划好相邻航线的间距并采用井字航线以提高点云覆盖。除此以外,在航线设计时还应注意:航线方向、航线长度和起飞前字绕飞航线设计等技术点,以保证成果质量。
3.4 航飞设计计算工具
在总结各航飞设计各参数关系的基础上,编制了航飞设计计算工具软件。通过该工具,设计人员可以快速计算点云成果主要指标,为方案设计优化提供便利。航飞设计计算工具界面如图5所示。
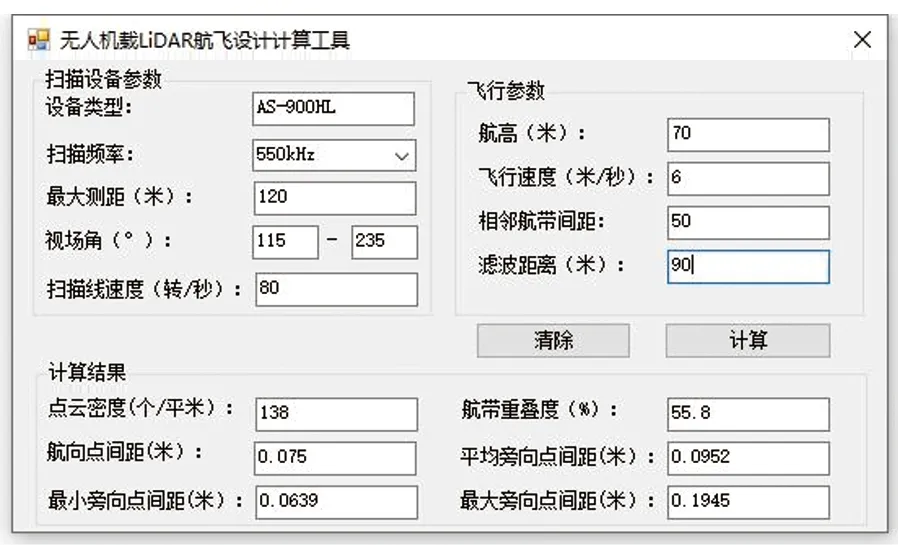
图5 航飞设计计算工具界面
4 航飞试验
4.1 试验目的
为了验证航飞设计方案及工具的正确性,比较不同航飞方案中,各类参数对点云成果的影响,选取试验区进行不同设计方案的航飞试验。综合评定不同航飞参数条件下,机载激光雷达的扫描效率、点云质量等多种指标,以及相应点云数据对大比例尺测图项目的适用性。
4.2 航飞设计
本试验区内地势平坦,主要以交通、水系、居民地和农田等要素分布为主。试验统一采用四旋翼无人机搭载多平台激光雷达测量系统(AS-900HL),设计了70 m、 100m、 140 m三种不同的航飞高度,对应设置扫描参数和飞行参数。具体参数设置如表3所示。
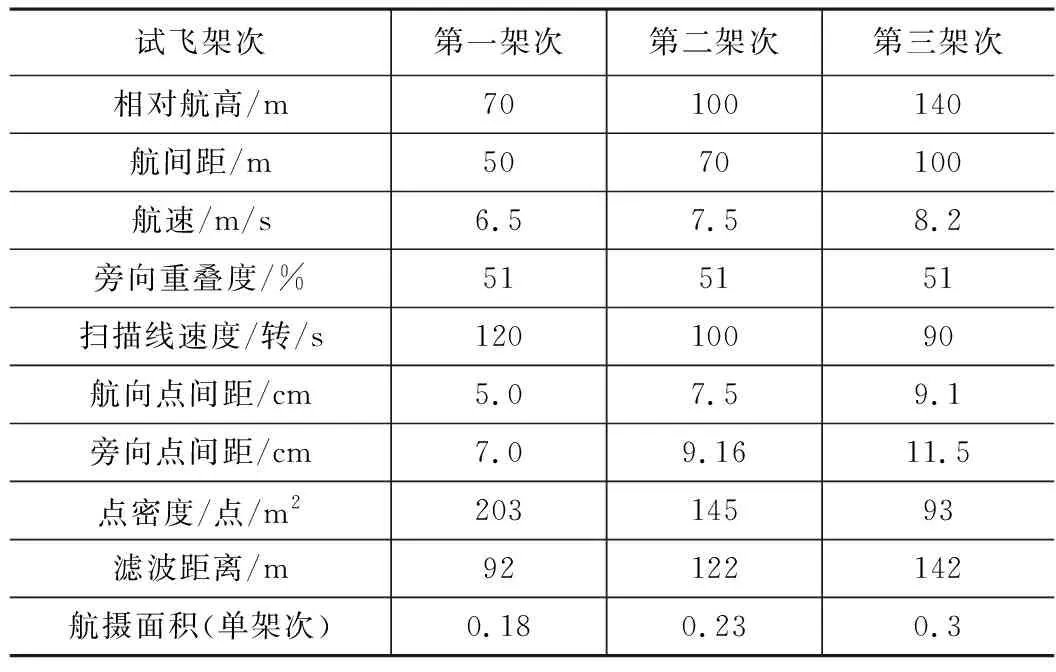
表3 扫描参数和飞行参数
4.3 质量评定与分析
通过验证,上述三种方案的点云密度以及覆盖完整性均能满足大比例尺测图要求。重点对点云精度进行评定与分析。
按照上文介绍的点云精度评定方法,选取24个平面检测点,36个高程检测点进行精度评定。平面及高程中误差统计结果如表4所示:
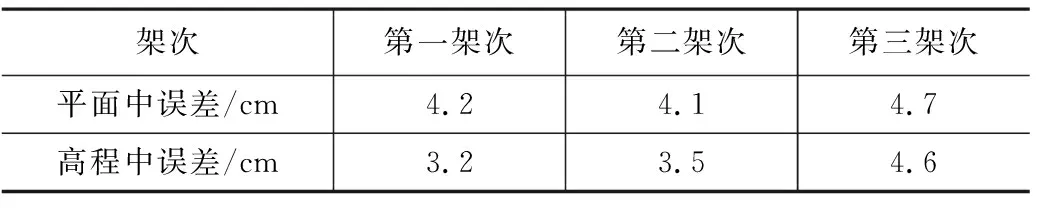
表4 平面及高程中误差统计
不同架次点云平面与高程误差分布如图6、图7所示。
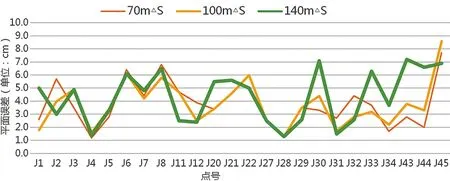
图6 平面误差分布
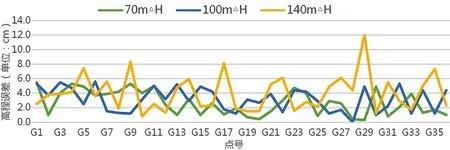
图7 高程误差分布
从平面精度统计表和误差分布图可以看出,三架次平面中误差均在 5 cm以内,最大误差在 10 cm以内。第一架次(70 m航高)与第二架次(100 m航高)平面精度接近,第三架次(140 m航高)平面精度略低。
从高程精度统计表和误差分布图可以看出,三架次高程中误差均在 5 cm以内,其中最大误差约 12 cm。与平面统计结果类似,第三架次(140 m航高)平面精度明显降低。
4.4 测试结论
通过测试得到如下结论:相对航高在 70 m、 100 m以及 140 m时,并采用相应航飞参数得到的点云成果,平面与高程精度均可达到 5 cm,理论上均能够满足 1∶500地籍项目、1∶500地形图和 1∶1 000地形图等大比例尺测图数据采集的要求。
5 结 语
本文针对测图生产需求,分析大比例尺测图对点云密度、覆盖完整性以及点云精度等质量要求。研究分析了航飞设计中各参数对点云质量要素的影响,总结了航飞设计工作步骤,编制了航飞设计计算工具,为进行科学设计提供依据。通过项目试验,得到采用无人机载LiDAR方法,在 140 m以下航高时,点云平面与高程均可达到 5 cm的结论,能够满足测图应用需求,为无人机LiDAR的数据获取及设计提供了可行的思路。
猜你喜欢
云南化工(2021年9期)2021-12-21 07:44:00
中国光学(2021年6期)2021-11-25 07:48:32
中国医疗设备(2019年1期)2019-01-15 12:10:54
中国音乐教育(2017年4期)2017-05-20 09:21:06
试题与研究·高考数学(2016年1期)2016-10-13 10:40:58
中国男科学杂志(2016年9期)2016-03-20 15:00:13
肇庆学院学报(2016年5期)2016-03-11 18:09:18
激光与红外(2015年10期)2015-03-23 06:07:18
数学教学通讯·初中版(2014年12期)2014-04-29 00:44:03
河南科技(2014年18期)2014-02-27 14:14:46