
一种航空发电机旋转整流器故障在线诊断技术*
2022-09-01 05:51刘繁,崔江,林华
电机与控制应用 2022年2期
刘 繁, 崔 江, 林 华
(南京航空航天大学 自动化学院,江苏 南京 211106)
0 引 言
航空三级式同步发电机是飞机电源系统的重要构件之一,其正常运行和飞机的安全息息相关[1]。经国内外研究,位于此类发电机转子上的旋转整流器容易发生故障,影响发电机的工作甚至对飞机安全造成严重隐患,因此需要对旋转整流器进行故障诊断分析[2-4]。目前该领域的诊断方法主要集中在信号处理上,或者采用将信号处理与人工智能相结合的方法。例如,文献[5]针对旋转整流二极管开路故障,采用频谱分析对其电压和电流信号进行了研究;文献[6]研究了一种基于深度置信网络(DBN)的改进方法,先使用快速傅里叶变换(FFT)提取励磁电流信号的频谱信息,而后采用DBN对该信息进行自适应诊断处理。
目前对旋转整流器的故障诊断主要是在离线条件下进行的,但其一旦发生故障,会在短时间内对飞机安全造成影响,因此对故障的在线诊断尤为重要。一些学者提出了相关思路,例如,文献[7]采用转子电流的二次谐波与基波的幅值比进行故障诊断,经离线和在线试验证明均能对单个旋转二极管实现故障定位,但在线诊断时存在动态响应延迟的问题;文献[8]提出了一种动态FFT技术,针对发电机输出电压信号采用FFT进行动态处理,得到其主频幅值的动态曲线,以该曲线的斜率作为故障特征进行诊断。但文献[8]中的斜率是通过曲线上某两点形成连线计算而得,这样处理导致特征的抗干扰能力较弱,其诊断结果也因此存在一定的误差。针对这一现象,本文在其基础上进行了进一步研究,提出了一种角度轨迹监测技术,所提取的故障特征抗干扰能力强,经试验证明能够快速检测出不同的故障模式,具有更好的诊断效果。
1 角度轨迹监测技术简介
1.1 幅值变化轨迹实现原理
本文采用FFT对交流励磁机的励磁电流信号进行处理[9]。当发电机旋转整流器出现故障时,谐波电枢反应会在交流励磁机上感应出相应的电流分量,引起励磁电流的变化[10]。这一现象可用图1表示,其中纵轴为励磁电流信号大小,横轴为采样时间,励磁电流信号按故障发生前后可分为x(n)和y(n),x(n)表示正常状态,y(n)表示发生了故障。从图1中可以看出,故障后的信号也分为刚发生时短暂的过渡期和之后的稳定期。

图1 故障前后励磁电流波形
一般情况下,一个或多个二极管故障都会导致励磁电流本身产生波动,因此,原始信号在经过FFT处理后的频域幅值大小在故障前后也会时刻产生变化。本文针对FFT处理后谐波的幅值变化轨迹进行进一步研究,其幅值轨迹的提取思路与文献[8]中所用技术相近,先使用该技术对故障前后的励磁电流信号进行处理。经研究,励磁电流经FFT处理后,其直流分量的幅值大小在故障前后具有非常明显的变化,其变化过程可用图2进行表示。

图2 直流分量幅值轨迹变化
可以看出,在正常状态励磁电流的直流分量幅值大小一直保持稳定。而在故障发生后,幅值逐渐增大,进入故障过渡期,直到一段时间后再达到新的稳定,即维持在故障稳定状态。
1.2 角度变化轨迹实现原理
采用图2中直流分量的幅值变化轨迹可初步监测整流器二极管的健康状况,但该轨迹的变化趋势比较平缓,不太明显。在试验中,由于器件本身存在的误差,励磁电流信号大小会同样产生一定的误差,只通过该幅值轨迹来进行区分很容易造成错误诊断,因此要实现精准的在线诊断必须寻找变化更为明显的故障特征。观察图2轨迹,可以发现在故障点及以后很短的时间内,曲线的陡峭程度突然增大,因此可以通过监测该幅值轨迹各点处的角度变化来实施更为快速和精准的诊断。且监测角度变化还在一定的程度上抵消了试验所带来的误差现象。该角度变化轨迹的具体提取流程如图3所示。
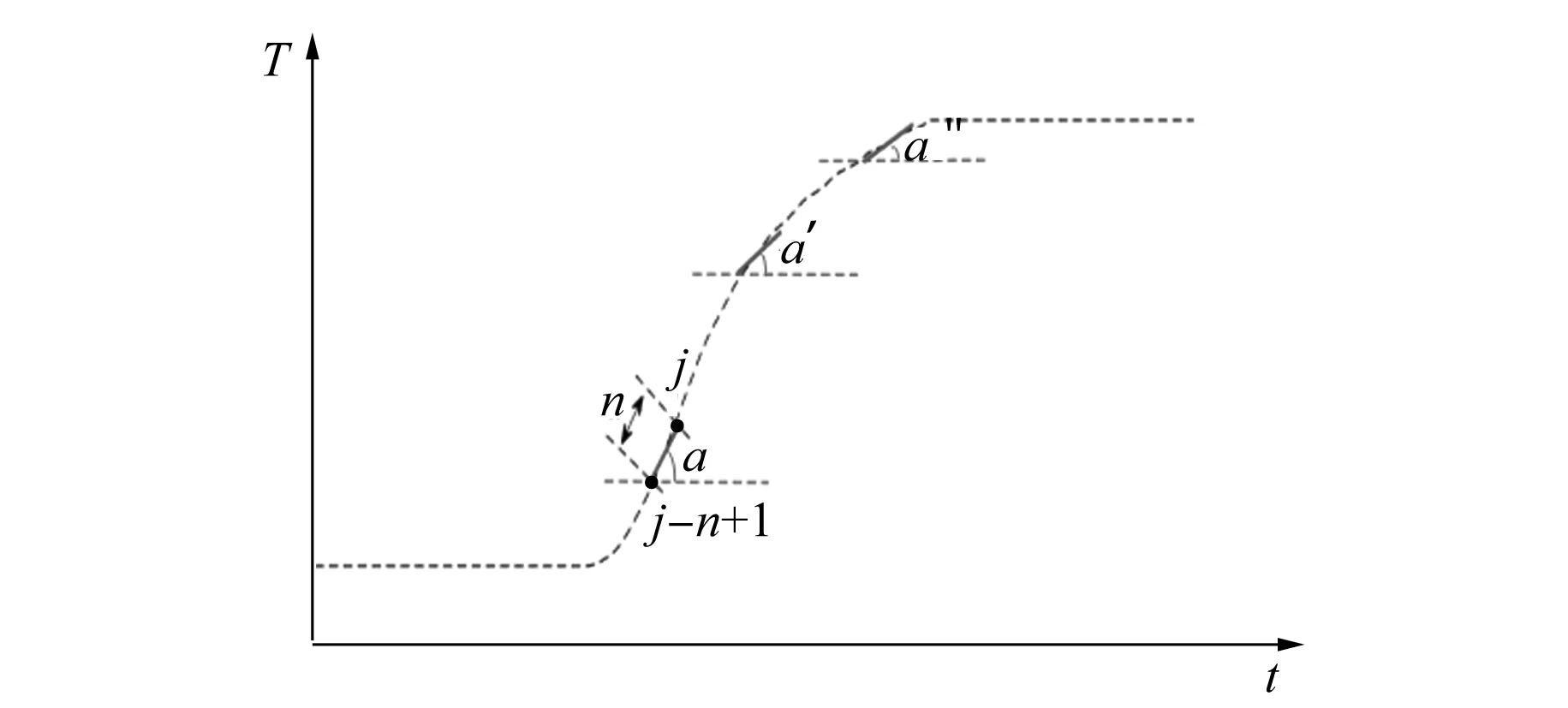
图3 角度轨迹提取流程
对任意一点处的角度进行计算首先要选取一定长度的点进行直线拟合。图3中针对j点,选取该点及其前n-1个点一起构成直线拟合的区间,即每次直线拟合的点长为n,然后以拟合出的直线和水平轴形成夹角并计算其值,即为j点处的角度。再针对下一点j+1和j-n+2之间的n点进行直线拟合并计算角度,以此类推,最终得到连续的角度变化轨迹。由于直流分量幅值轨迹的变化趋势是先上升再不变,角度轨迹的变化趋势是先增大再下降,其变化的响应速度更快,变化过程更加明显。采用该角度轨迹作为一组故障特征,记为fa。另外经研究,基波的幅值轨迹跟直流分量的角度轨迹有着相似的变化趋势,因此再采用基波幅值轨迹作为第二组故障特征,记为fT,采用这两组故障特征实现旋转整流器的在线诊断具有更好的效果。
其中,直线拟合采用最小二乘法进行线性拟合,对满足直线方程的x和y有如下关系:
y=kx+b
(1)
式中:k为斜率;b为截距。
对于n组数据(xi,yi),i=1,2,…,n,其中xi均间隔相同的长度,因此xi值认定无误,所有误差只与yi相关,则利用最小二乘法进行直线拟合时要求观测值yi偏差的加权平方和为最小,需满足如下方程:

(3)

在试验中,由于存在噪声的干扰,还要对角度轨迹进行相应的滤波操作。本文采用多种滤波方案进行对比,最终选取卡尔曼滤波进行去噪,具有良好的效果。
1.3 特征提取和诊断流程
将该角度轨迹监测技术应用于航空发电机旋转整流器故障特征提取和诊断中,具体流程如下:
(1) 采集发电机的励磁电流数据样本集,并对数据样本集进行划分:一份作为训练样本产生故障字典,另一份作为测试样本评估方法的效果。
(2) 对不同故障模式下的训练样本采用FFT进行连续处理,提取出fa和fT作为故障特征信息,并存入故障字典。
(3) 把测试样本同样采用本文方法进行处理并提取故障特征信息,然后采用故障字典方法进行匹配完成故障诊断。
2 试验验证
2.1 试验平台介绍
利用一台三级式交流同步发电机作为试验平台,其结构组成如图4所示。平台主要由变频器、三相异步调速电机(模拟原动机)、民用三级式无刷同步交流发电机、电流霍尔传感器、阻性负载与数据采集系统等部分组成。

图4 试验平台组成
为了实现对试验平台中旋转整流器的任意一个二极管开路故障的人为控制,本文对旋转整流器做了一些改装,改装后二极管的故障可通过开关控制,方便了试验。发电机和电动机的详细参数如表1所示。

表1 试验平台主要参数
试验中,分别在空载、0.34 kW阻性负载、1.48 kW阻性负载、0.38 kW阻性和0.36 kVA感性混合负载、0.64 kW阻性和0.68 kVA感性混合负载下对故障特征信号进行采集。得到不同负载下各故障模式下的励磁电流波形如图5所示。在每种负载条件下均得到500个样本,将其中 250个作为训练样本,另外250个作为测试样本进行诊断。

图5 不同负载下各故障模式励磁电流
2.2 试验结果分析
首先根据文献[8]中幅值轨迹的提取技术,对每个数据样本进行定长为256点、每次间隔长度为10个数据点的连续FFT处理。对每一个包含2 000点的数据样本共进行了180次连续FFT处理,得到其直流分量幅值变化轨迹。
再对直流分量幅值轨迹进行直线拟合并提取角度特征。经多次研究分析,采取每次长度为10个数据点的直线拟合处理效果较好。再计算每次拟合所得的直线与水平轴的角度。由于试验存在噪声的干扰,其幅值轨迹的误差波动较大,这样在进行直线拟合后计算得到的角度轨迹是存在较大误差的,因此最后要进行滤波操作。以空载情况为例,本文将计算出的角度轨迹采用中值滤波、小波滤波和卡尔曼滤波等多种滤波方案进行对比研究,具体对比如图6所示。

图6 多种滤波方案对比
由图6可见卡尔曼滤波的效果最好。经过卡尔曼滤波后的角度轨迹在旋转整流器不同的故障模式下有着明显的区分度,由此提取的fmax可以作为一组故障特征来实现旋转整流器的在线诊断。另外,对基波的幅值轨迹同样进行卡尔曼滤波处理,处理结果如图7所示,可见基波的幅值轨迹同样有着较大的区分度,由此提取的Tmax可以作为另一组故障特征。

图7 卡尔曼滤波后基波幅值轨迹
在不同的阻性负载条件下,上述两种变化轨迹依然与空载条件下保持一致,均具有良好的区分度,提取出的故障特征均可以快速检测出故障。再进行故障分类,提取测试样本的故障特征并通过训练样本生成的故障字典进行模式识别,具体操作过程以图8为例,其中测试样本轨迹是使用单管短路样本处理形成的。由图8可见,该测试样本的轨迹与单管短路轨迹之间的距离最近,因此故障匹配时采用欧氏距离法(ED)来计算轨迹间的距离。该测试样本轨迹经ED方法计算后与单管短路轨迹间的距离最小,因此判定为单管短路故障。
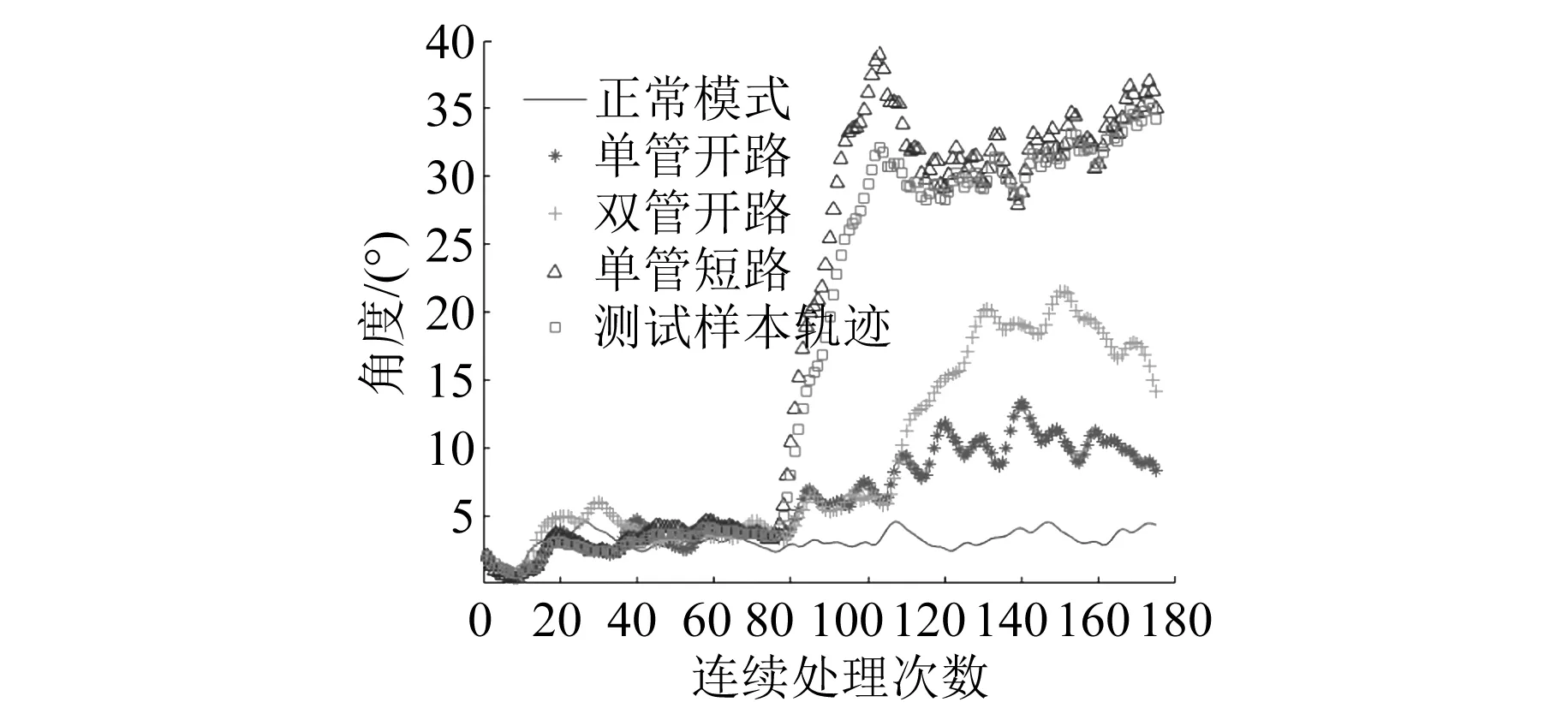
图8 故障分类操作过程
具体的故障诊断结果如表2所示。此处,仿真软件为 Matlab2019a,计算机主频为2.9 GHz,内存为16 GB,操作系统为Windows 10,其中故障分析时间是FFT处理和卡尔曼滤波的时间之和。可见本文所提出的角度轨迹在线诊断技术不仅在特征提取上速度快,而且诊断正确率高,具有良好的效果。
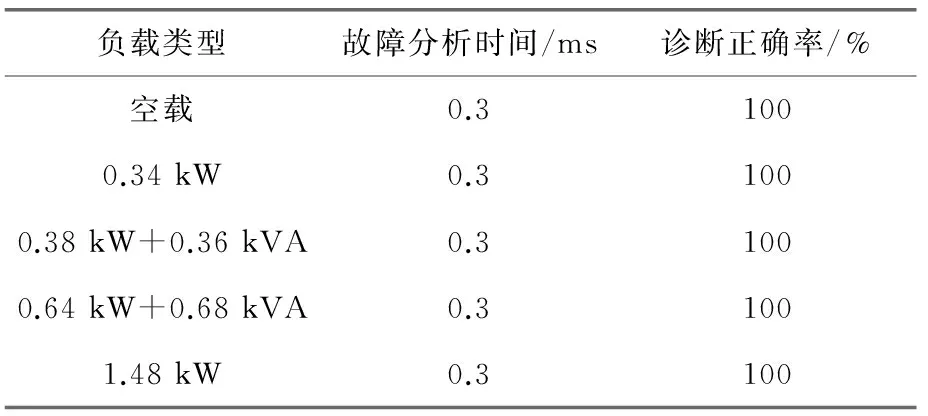
表2 不同工况下诊断正确率
3 结 语
本文利用FFT实现了一种角度轨迹监测技术,并将其应用于航空发电机旋转整流器的在线诊断应用中。通过试验可以得出如下结论:
(1) 该角度轨迹监测技术是可行和有效的,可以应用于航空发电机旋转整流器的故障诊断技术中。
(2) 通过该技术提取的故障特征区分度高,特征提取速度快,完全可以实现故障的在线诊断,并取得良好的效果,为航空发电机旋转整流器的快速诊断提供了新思路。
猜你喜欢
大电机技术(2022年3期)2022-08-06
装备维修技术(2022年7期)2022-07-01
电气技术(2022年6期)2022-06-27
振动与冲击(2022年10期)2022-05-30
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
科学家(2021年24期)2021-04-25
电子制作(2018年1期)2018-04-04
电子制作(2017年7期)2017-06-05
电子制作(2017年19期)2017-02-02
