
有机蔬菜大棚除草机器人磁导航模糊控制系统研制
2022-08-31 03:46杨超淞洪晓玮周卫鹏
制造业自动化 2022年7期
杨 婕,杨超淞,洪晓玮,陈 勇*,周卫鹏
(1.南京林业大学 机械电子工程学院,南京 210037;2.镇江临泰农业科技有限公司,镇江 212000)
0 引言
目前有机蔬菜生产中不能使用除草剂,一般采用人工除草[1],但人工除草耗时长,效率低。机械除草作为一种绿色无公害除草方式在现代有机蔬菜行业中已得到广泛重视[2,3],具有非常乐观的前景。
LiangYunlin等[4]研制了具有机器视觉和框架式激光指示器的除草机器人,提出了静态除草路径规划算法。Zhang Q等[5]提出了动态路径跟踪算法,用于农业拖拉机跟踪目标路径。李会宾等[6]采用拓展卡尔曼滤波算法对用三维激光雷达结合RANSAC算法获取果园地图的行直线信息优化,设计了纯跟踪式的自主行间导航算法。金小俊等[7]开发了基于机器视觉导航的除草机器人,提出一种图像分割算法。王鹏等[8]针对温室大棚内喷雾机器人提出了一种导航线和QR码组合的视觉导航算法,实现精准导航。目前,农业上多采用视觉导航,但是有很多不确定性且对于有机蔬菜大棚内除草机器人导航的研究较少。针对上述问题,因磁导航在工业上应用广泛,成熟可靠,本文研发了一种有机蔬菜大棚内除草机器人的磁导航模糊控制系统。工业上磁条多在地面上或瓷砖下,本文提出将磁条铺设在大棚钢架上,机器人沿着磁条行驶,设计模糊控制器实现对机器人处于各种偏差现象的调整,从而进行自主导航。
1 除草机器人总体结构
如图1所示,大棚中的田地分成块状区域来种植不同种类的蔬菜。因此本文中机器人的工作路线如图2所示,机器人从区域1的底端出发,到达顶端后,控制原地转向机构,移动到区域2的顶端,实现垄与垄的横向行驶。依次运动,在到达区域4的底端后,按照原路线返回到起点,如此往复行驶。

图1 蔬菜大棚示意图

图2 自动行驶路线
机器人的整体结构如图3所示,主要由轮式移动平台、线性模组、末端执行装置以及杂草识别装置四个部分组成,其中移动平台包括四个行驶轮胎、四轮转向机构、移动平台框架以及磁传感器等;杂草识别装置由FPGA开发板等构成;供电电池固定在移动平台框架的四个顶点处;磁传感器通过支架板安装在机器人两侧的几何中心点;末端执行器固装在Z轴下方且可调节其纵向位置以适应不同高度工作。样机实物如图4所示。

图3 除草机器人结构图

图4 样机实物图
2 基于模糊控制器的磁导航路径跟踪研究
2.1 方案介绍
有机蔬菜大棚除草机器人的控制系统是一个复杂的非线性系统,经典控制理论方法只适用于线性系统。模糊控制器作为一种较为容易理解的非线性控制器[9],具有良好的实时性、鲁棒性以及容错性,其最大特点是不依赖于被控对象的精确数学模型,适用于各种非线性系统的控制。因此本文基于磁传感器,采用模糊控制理论的方法研究大棚内除草机器人的导航路径跟踪,此导航方式定位精确,路径铺设、变更相对简单,成本较低,可根据大棚自身的钢结构进行铺设。
2.2 磁导航模糊控制器的设计
机器人行驶时出现位置偏差是由其两侧轮毂电机之间的差速运动产生,控制相关电机转速就能直接控制机器人的位姿状态。因此,本文以磁传感器相对于磁条正中位置的偏差以及偏差的变化率作为模糊控制器的输入以控制电机转速,被控电机的PWM占空比值作为输出设计了一种二维双输入单输出的磁导航模糊控制器[10],如图5所示。
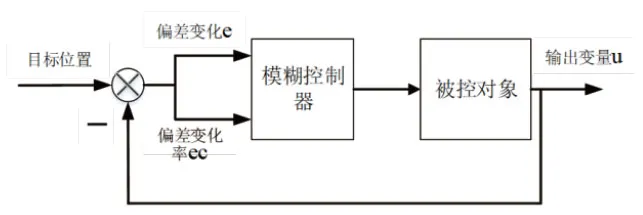
图5 磁导航模糊控制器
2.2.1 输入和输出变量的模糊化
磁导航传感器必须与对应极性的磁条配套使用,与磁条的有效感应距离多为10mm~65mm。本文选用具有8路开关量信号输出的CNS-MGS-08磁传感器。将磁传感器垂直安装在移动平台的前方和侧方,距离磁条表面40mm左右,磁条宽度为30mm,利用传感器内部间隔的8个采样点检测出磁条周围的磁场,每个采样点都有一路对应输出信号,当采样点采集到磁信号时,就会输出低电平,而没有采集到磁信号的通道会被置于高阻状态,磁传感器输出的信号经过光电 合器处理后能直接与DSP芯片的I/O后连接。
本文将磁传感器的8路磁信号通道依次从左往右编号,然后将传感器以偏差量为一厘米分别做左偏和右偏测试,直到完全偏出磁条,左偏、右偏测得的实际输出信号分别如图6(a)、图6(b)所示,红圈代表有信号输出,白圈代表无信号输出,其行驶时的左右偏离状况分别有6种磁信号输出组合状态。

图6 输出信号
若中间有四路信号为红色,则表示机器人正处于磁条中间位置。根据检测到的信号状况把偏差的实际范围定为[-4cm,4cm],偏差量的单位为1cm,设置偏差E的论域为{-3,-2,-1,0,1,2,3},将偏差E的模糊子集定为7档。模糊控制器的第二输入偏差变化率EC是当前误差与上次误差的比较,即EC=E(K)-E(K-1),设定EC的实际范围为[-3,3],其论域定为{-3,-2,-1,0,1,2,3}。
模糊控制器的输出是机器人移动平台两侧轮毂电机的PWM波占空比的差值U=右侧电机占空比—左侧电机占空比。根据电机调速试验知输出U的实际范围为[-15%,12%],其论域定为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6];为对应输入等级,输出的模糊子集也取7档。建立输出量的模糊语言为{右电机加大速,右电机加中速,右电机加小速,左右电机速度不变,左电机加小速,左电机加中速,左电机加大速。
2.2.2 建立模糊规则
规则库是模糊控制器的核心部分,反映了控制器输入与输出的对应关系。机器人在沿磁条行驶时,其自身位姿状态与给定路径的偏差情况如图7所示。

图7 机器人位姿状态
依据机器人与磁条的位姿状态和实际驾驶经验总结调整机器人行驶路径偏差的原则大致为:当车体位置如图7(a)中所示出现左偏时,若偏差量极大,应直接输出较大的控制量使左侧电机加大速实现纠偏;若偏差量适中,且有减小偏差的趋势,应控制左侧电机适当加速回到正轨;若偏差量较小,则直接控制左侧电机输出较小的控制量实现纠偏;车体位置如图7(c)中所示出现右偏的情况与上述同理。
2.2.3 模糊决策和反模糊化
目前大量研究表明采用以关系合成推理(CRI)为基础能衍生出多种模糊推理方法,其中以Mamdani推理方法最为广泛使用,它的推理表达式为:
在计算R前,首先依据模糊规则的输入部分得到向量矩阵Qi,然后将Qi转化成隶属函数向量同对应规则的输出部分作直积得到每条规则下的模糊向量矩阵Ri,最后将所有的Ri作合成运算得到总模糊关系矩阵R。在进行模糊推理时,只能根据输入量在论域中的等级值进行合成运算。
经过模糊推理得出的输出控制量还是模糊集合,不能直接作用于实际输出环节。因此,必须将控制器输出的模糊量转化为精确的数字量,本文将采用加权平均法对输出的模糊量进行清晰化,其离散情况下的公式如下,式中控制决策值是模糊控制器的输出量PWM波占空比差值。

3 实验与分析
以机器人前进动作为研究对象,包括纵向和横向行驶,通过实验结果对机器人的直线纠偏能力和行驶速度性能进行综合实验分析。设定行驶距离为3米,速度定为0.3m/s,计时得出机器人的实际移动速度,将黑色油墨笔贴在钢板的中心位置,机器人在移动时会在地上画出轨迹,根据画出的轨迹与铺设的直线轨迹比较测出每次实验的最大偏差距离。将机器人的起始位置分别置于偏离磁条2cm、1cm和无偏差位置进行实验,如图8、图9所示,前五次初始位置为右偏,后五次为左偏。速度近似曲线如图10所示。
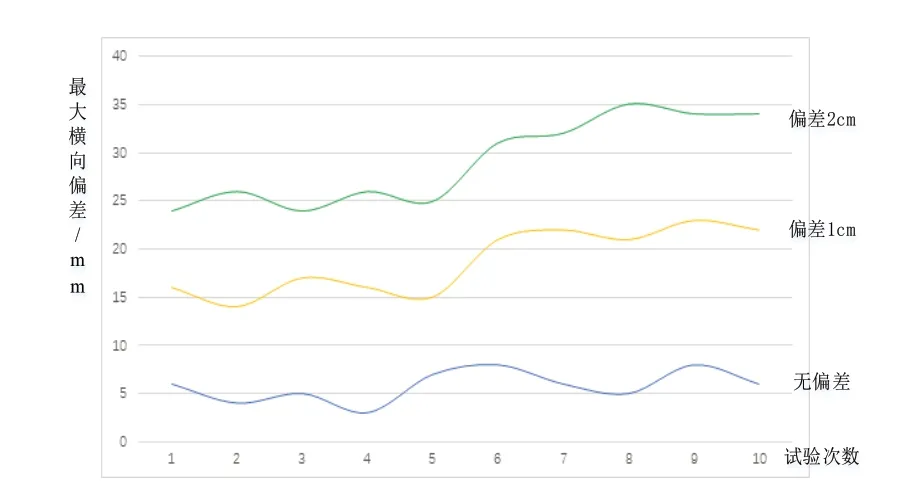
图8 纵向最大横向偏差距离

图9 横向最大横向偏差距离
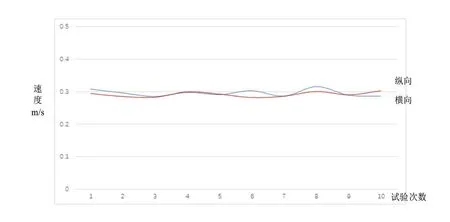
图10 速度性能曲线
由图可见,机器人行驶时相对于铺设磁条的偏差距离范围在0~20mm之间,纵向偏差整体略小于横向偏差,当机器人初始位置处于正中位置时最大横向偏差距离最小;机器人在行驶速度方面较为稳定,没有明显的波动变化,基本满足设计要求。
4 结语
本文主要针对有机蔬菜大棚除草机器人的路径跟踪研究,将工业上的磁导航应用到有机蔬菜大棚内,提出将磁条铺设在大棚钢架上,机器人沿着磁条行驶,使用模糊控制理论的方法实现机器人的直线行走,通过比较采集到的磁信号对移动平台的轮毂电机不断进行调速和控制机器人沿着制定好的行驶路线行驶。实验结果显示,该方法适用于蔬菜大棚除草机器人,行驶速度稳定,沿直线行驶的能力较好,与理想路径误差在0~20mm之间,满足蔬菜大棚的需求。
猜你喜欢
今日农业(2022年15期)2022-09-20
趣味(作文与阅读)(2022年3期)2022-06-10
商界评论(2022年1期)2022-04-13
今日农业(2021年21期)2021-11-26
学生天地(2020年6期)2020-08-25
草原(2018年2期)2018-03-02
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
中国新技术新产品(2014年6期)2014-03-25
环球时报(2014-01-08)2014-01-08
