机器人辅助经肌间隙置入椎弓根螺钉在胸腰段骨折手术治疗的临床研究
2022-08-30 03:14冯硕何达郑山敖进涛
中国骨与关节杂志 2022年8期
胸腰椎骨折在脊柱损伤中很常见,在各年龄段患者中均有发生。胸腰椎骨折手术治疗的目的是恢复脊柱的稳定性,避免神经损伤进一步加重,使患者早期活动。尽管手术治疗的目标已达成普遍共识,但不同手术方法之间的优劣仍存在争议。椎弓根螺钉内固定可以提供即刻的脊柱稳定性,可靠地恢复胸腰椎序列,恢复椎体和椎管的形态
。但是,传统的开放手术植入椎弓根螺钉,手术创伤大,并发症多,通过肌间隙入路的方式植入椎弓根螺钉是一种更为微创的手术方式
。然而,因为不同患者的病情不尽相同,不同医师的技术及经验不同,如何选择更为合适的手术方法仍有争议
。新技术为临床医师提供了新的选择,骨科机器人的开发为经肌间隙置入椎弓根螺钉提供了一种新的辅助技术。该技术对提高置钉的准确性、减少术中出血、保证手术的安全性具有积极的作用
。目前对机器人辅助经肌间隙椎弓根螺钉内固定治疗胸腰椎骨折的临床结果进行前瞻性研究的报道较少。结合胸腰椎骨折的手术指征和特点,笔者设计了一项前瞻性队列研究,纳入 2019 年 1 月至 2021 年 3 月收治的胸腰段骨折的患者,均行经肌间隙椎弓根螺钉内固定术,评价机器人辅助经肌间隙椎弓根螺钉内固定治疗胸腰椎骨折的临床效果,报道如下。
资料与方法
一、纳入标准与排除标准
1.纳入标准:(1) 胸腰椎骨折损伤分类及损伤程度评分 (thoracolumbar injury classification and severity score,TLICS) ≥ 4 分者;(2) 没有骨质疏松 (骨密度 T 值 > -1.0) 者;(3) 年龄 20~50 岁者;(4) 椎管内占位 ≤ 50% 者。
2.排除标准:(1) 骨折椎体椎弓根毁损无法植入螺钉者;(2) 存在全身性感染或术区感染者;(3)有神经功能障碍者;(4) 患有其它严重疾病 (多发创伤、恶性肿瘤、精神疾病) 者;(5) 一般情况差,无法耐受手术者;(6) 拒绝外科治疗者。
二、一般资料
本组共纳入 84 例,其中男 56 例,女 28 例;年龄 21~50 岁,平均 (38.32±8.65) 岁。依据在置入椎弓根螺钉时是否采取机器人辅助置钉的方式在术前预先将患者分为试验组 (采取的置钉方式为骨科机器人辅助下置钉) 和对照组 (采取的置钉方式为 X 线透视辅助下徒手置钉)。试验组 43 例,其中男 28 例,女 15 例;年龄 21~50 岁,平均 (37.56±9.27) 岁;对照组 41 例,其中男 28 例,女 13 例;年龄 21~50 岁,平均 (39.12±7.99) 岁。两组在性别 (
=0.095,
= 0.758)、年龄 (
= -0.827,
= 0.411) 上差异无统计学意义。
三、手术过程
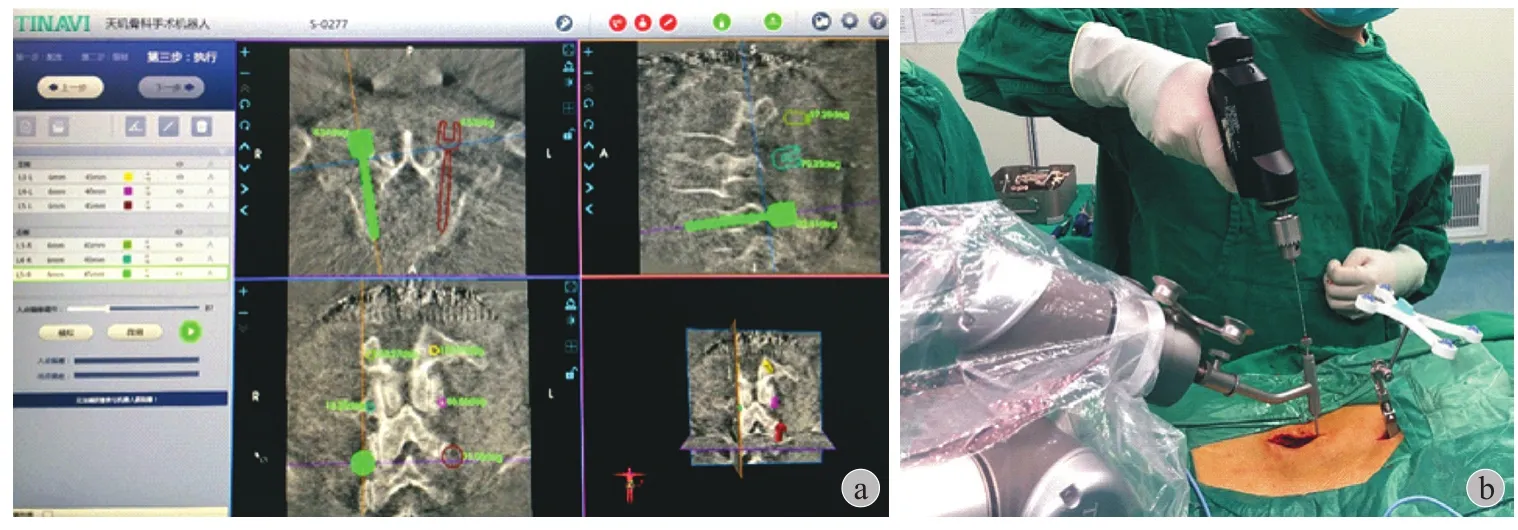
术前行 X 线、CT、MRI 检查在所有患者中确认手术指征。所有患者均全身麻醉插管,俯卧位施术,以伤椎为中心做后正中皮肤切口,于腰背筋膜表面向两侧游离皮下软组织。透视辅助手术组:中线旁开约 2~3 cm 纵向切开腰背筋膜,于多裂肌和最长肌间隙内钝性分离至关节突,牵开肌肉,电刀剥离并显露横突根部及关节突外侧,术者根据骨性标记和 X 线透视辅助在伤椎及上下椎体分别置入 6 枚固定椎弓根螺钉,安装纵向连杆撑开复位,C 型臂X 线机及透视确认复位良好。机器人辅助手术组:采用 TiRobot (TINAVI 医疗科技有限公司,北京) 机器人 (图1) 辅助下以逐级套筒钝性分离腰背筋膜及肌肉,机器人按照术中实时规划的路径在伤椎及上下椎体分别置入 6 枚导丝 (图2),术者沿导丝置入椎弓根螺钉,沿导轨安装纵向连杆,透视确认螺钉位置及骨折复位良好,逐层缝合伤口。

四、评价指标
1.椎弓根钉置入的准确性:术后评估置钉的准确性使用盲法由 1 位独立的放射科医师在薄层 CT 扫描上测定。基于改良的 Gertzbein 和 Robbins 量表对螺钉进行分类:A 级,没有破坏椎体或椎弓根的骨皮质;B 级,螺钉穿破骨皮质 < 2 mm;C 级,螺钉穿破骨皮质 2~< 4 mm;D 级,螺钉穿破骨皮质 4~< 6 mm;E 级,皮质破裂 ≥ 6 mm
。椎弓根螺钉在任何方向上都没有破坏骨皮质 (A 级) 记录为定位准确的椎弓根螺钉。分级为 B~E 的螺钉记录为螺钉位置不佳
。
康川司法所向社区服刑人员发放手机,实行手机定位。在矫正工作开始时,服刑人员缴纳500元押金后便可免费使用该手机。矫正工作结束时,服刑人员上交手机便可退还押金。
采用 SPSS 19.0 软件对数据进行统计学分析。对年龄、平均手术时间、辐射剂量、术中出血量、椎体高度恢复的平均百分比、椎管内占位减少平均百分比的均值和标准偏差进行组间比较,采用独立样本
检验。对病例数、性别和螺钉的数目及其百分比进行组间比较,采用
检验。
< 0.05 为差异有统计学意义。
农村居民作为农业生产的主体,在实际的农业生产过程中,要通过利用各种媒体,如电视、广播、网络等宣传媒体,加大宣传力度,使各类气象灾害知识能够传递至每个用户手中,使广大农民能够按照气象规律进行防灾减灾,提高农民应对气象灾害的防御能力,要通过编写各类指导生产手册,使农村居民能够及时了解各类农业生产信息,并在实际生产中得到有效运用。
3.椎管内占位的测量:测量轴向 CT 扫描显示骨碎片椎管内侵犯的最大值与椎管矢状径的比值。
提高学生学习兴趣,可帮助学生改善学习效率,并使生物成绩快速提升。在教学实践中,教师可通过引导学生观察大自然的方式提升学生对于生物课程的兴趣。首先教师可利用假期时间,邀请学生进入到大自然中开展活动,在活动中,教师可开展相关的生物实验,以帮助学生认识到大自然的魅力与生物的多样性。之后教师可组织学生在课堂中将活动的体会进行分享。通过这样的活动学生将对自然环境产生新的认识,并将在教师的引导下对生物课程产生较为浓厚的兴趣。
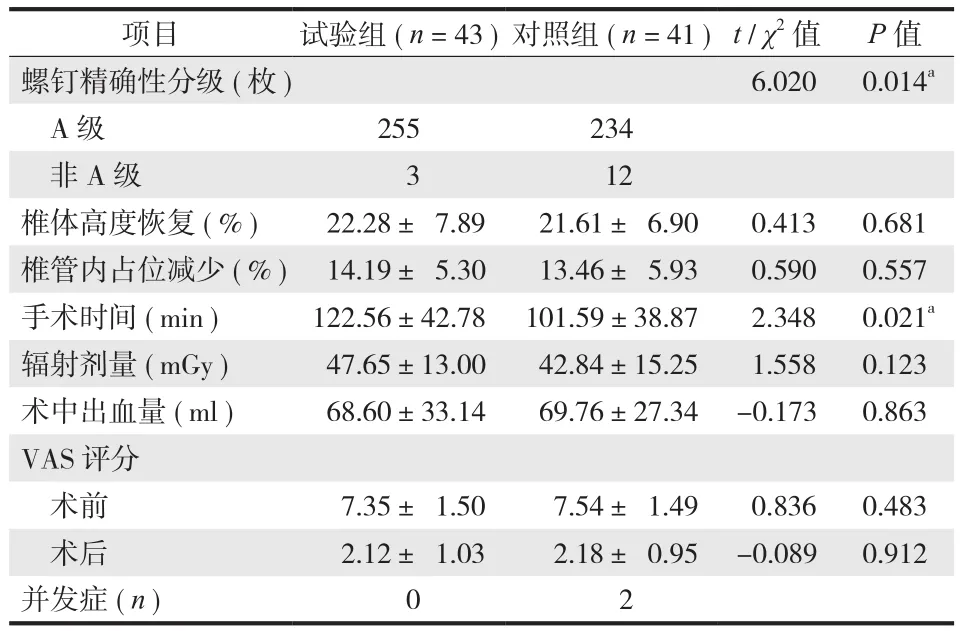
本组 84 例共植入 504 枚椎弓根螺钉。试验组植入椎弓根螺钉 258 枚,对照组植入椎弓根螺钉 246枚。试验组中 1 枚螺钉因为术中透视位置不佳,调整螺钉位置。试验组 6 枚螺钉在术中对螺钉位置进行了修改。试验组置入的 258 枚螺钉中,A 级 255枚,B 级 3 枚,无 C 级、D 级、E 级螺钉。对照组置入的 246 枚螺钉中,A 级 234 枚螺钉,B 级 11 枚,C 级 1 枚,无 D 级和 E 级螺钉。试验组中精确置钉(A 级) 的比例 98.8% (255 / 258) 明显高于试验组的95.1% (234 / 246) (
< 0.05)。
7.疼痛视觉模拟评分 (visual analogue scale,VAS):手术前后对骨折部位疼痛症状的评价使用VAS 评分:使用有 0~10 数字的视觉模拟评分尺,让患者在直尺上指出能代表自己疼痛程度的相应位置,其中 0 分表示无痛,10 分代表难以忍受的最剧烈的疼痛。
业务科员工把儿童的基本情况通报给各部门,确定个案管理,协调特殊教育、康复、心理、社会工作、医疗、保育等专业人员对儿童进行专业评估,评估在三周以内完成。第四周,个案管理工作人员收集所有专业评估的资料,整理形成个案报告。
从理论上讲,椎弓根螺钉手术恢复矢状位胸腰椎序列和椎体高度,可以恢复后纵韧带张力,使椎体后缘的骨块复位,达到椎管减压的目的。部分学者担心机器人辅助置钉组椎体高度恢复和椎管内占位减少的效果,因为机器人辅助组使用的均为空心多轴螺钉,而多轴螺钉对骨折复位的作用只能依靠螺钉之间的撑开和对连杆弧度的调整。研究结果证实,机器人辅助椎弓根螺钉置入没有对骨折块复位产生负面影响,在软组织损伤更小的前提下,置入椎弓根螺钉,并通过钉棒系统稳定骨折椎,提供了足够的局部生物力学稳定性
。
碑帖学属于书法史范畴,是具有学科交叉性的课题,需要史学理论和书法艺术素养兼备的人才。目前在碑帖学的研究人员中,有影响的多是具有书法、美术素养的学者,如曹建、金丹等,他们的研究范围广泛且提出了许多新的观点,值得思考。但应注意的是,对于碑帖学的相关课题研究需要有一定的历史理论作指导,所以培养具有历史理论基础的书法史人才迫在眉睫。
5.辐射剂量:被定义为手术的总辐射剂量,包括术中透视和术中 3D-C 型臂 X 线机扫描的总辐射剂量。
8.并发症发生率:试验组和对照组的并发症发生率按并发症例数 / 总例数计算。
五、统计学处理
2.椎体高度的评价:使用侧位 X 线片或 CT 扫描矢状位重建对椎体前缘塌陷处的椎体高度进行量化。使用骨折椎体前缘高度与骨折椎体下位邻椎前缘正常高度的比值对椎体高度进行量化评价。
结 果
4.手术时间:被定义为手术所需的所有时间,包括切开皮肤,暴露手术区域,插入螺丝,伤口缝合完毕的时间以及术中影像学检查占用的时间。
试验采用某工业污水处理厂用于深度处理的10kg/h纯氧型臭氧发生器(型号:CF-G-2-10kg,青岛国林实业股份有限公司)制备臭氧,通过控制出气阀将产生的臭氧通过砂芯曝气头流经盛有370mL浓度为10.81g/L的碘化钾吸收液的500mL臭氧吸收瓶进行臭氧吸收,此过程臭氧全部被吸收,且产生的氧气的量与臭氧的体积比为1∶1,因此,吸收后的气体可通过湿式气体流量计(型号:LMF-2,长春湿式流量计湿式气体流量计)计量累计气体流量。
两组椎体高度恢复的平均百分比、椎管内占位减少平均百分比、辐射剂量、术中出血量和手术前后的 VAS 评分差异均无统计学意义 (
> 0.05)。试验组的手术时间长于对照组,差异有统计学意义(
< 0.05) (表1)。试验组的并发症发生率 (伤口延迟愈合 2 例,经反复换药,分别于术后 4 周、6 周愈合) 高于对照组,但差异无统计学意义 (
> 0.05)(表1)。
讨 论
一、内固定手术的必要性
根据 Denis 的“三柱”理论,不稳定脊柱骨折需要行内固定手术治疗
。有神经损伤症状的不稳定爆裂性骨折需要手术复位和置入内固定,这一观点已经成为共识。然而,对于无神经系统缺陷的胸腰椎不稳定爆裂性骨折的正确治疗方法并未达成共识,这个问题仍然存在争议。对于无神经损伤的爆裂性骨折,有些医师建议保守治疗。然而,保守治疗可能导致持续的局部疼痛、运动障碍和进行性脊柱后凸畸形。而手术治疗,可以防止游离骨块移位、促进骨折复位和提供坚强的内固定。经椎弓根螺钉内固定手术治疗胸腰椎爆裂性骨折的效果是令人满意的
。所以,本研究中涉及的病例选择内固定手术治疗,可以更可靠地恢复矢状面脊柱序列和复位骨折。
二、组间置钉精确性的差异
本研究比较了机器人辅助椎弓根螺钉置入和X 线透视辅助椎弓根螺钉置入在胸腰段骨折经肌间隙入路手术的结果。结果显示,机器人辅助椎弓根螺钉置入可以达到 98.8% 的椎弓根螺钉精确定位,而 X 线透视辅助椎弓根螺钉置入的定位精确的螺钉比例为 95.1%,这一结果明确的说明了机器人辅助经肌间隙椎弓根螺钉置入的准确性超越了人类的徒手技术。在很多病例中,因为椎弓根直径较小、骨折伤及椎弓根、肌肉张力阻碍等原因,确定椎弓根螺钉的进针点和方向及精确的置入是非常有挑战性的
。一直以来,外科医师依靠术前影像 (X 线、CT、MRI) 并辅以术中 X 线透视达到精确置钉的目的
。然而,徒手操作的准确性可能会受到外科医师的技术水平、经验和疲劳程度的限制
。非脊柱外科专科医师或年轻的专科医师可能存在椎弓根螺钉置钉经验不足的问题,经验丰富的专科医师也会有疲劳或走神的时候,但骨科机器人弥补了这些差距和不足,稳定的将准确性误差控制在1 mm 之内,使得很多高难度手术的学习曲线大为降低
。通过机器人辅助,不同级别的医院、不同级别的医师能达到同质化的治疗效果。普通的医师能够做较高难度、较复杂的手术;有经验的医师借助机器人,能够使手术效果更加完美、更加安全、更加省力。置钉准确性的提升主要还是因为机器人弥补了不同医师之间技术水平、经验和疲劳程度的区别,不同于术中导航等产品只是通过示踪器提供手术器械和骨结构相对位置的实时影像。应该说机器人辅助手术给医师提供的帮助更全面更稳定。在本研究结果中,机器人辅助组有 1 枚螺钉因为术中透视位置不佳,调整了螺钉位置,可能是操作失误或克氏针在骨面滑动导致。相应的,在徒手 X 线透视辅助组椎弓根螺钉置入过程中,有 6 枚螺钉在术中对螺钉位置进行了修改,反复术中透视是 X 线辅助徒手置入椎弓根螺钉术式的固有缺陷
。可见,机器人辅助微创椎弓根螺钉置入在精确控制位置及方向方面起着重要的辅助作用,明显优于 X 线透视的辅助效果。
三、椎体高度与椎管内占位的变化
6.术中出血量:手术期间失血量,包括在吸引瓶和纱布上的血液总量。
四、组间手术时间的差别
X 线辅助组手术中螺钉置入的准确性往往更容易受到患者身体形态、椎弓根解剖变化、椎旁肌肉张力、术中出血等因素的影响,置钉准确性低于机器人辅助组,而反复调整螺钉位置势必增加手术时间。同时,机器人辅助椎弓根螺钉置入手术技术需要在手术中增加患者示踪器置入和术中 CT 扫描以及机器人设备组装的时间,这也是一个不可忽视的因素。本研究中手术时间相关的研究证实,机器人辅助手术组 (试验组) 为 (122.56±42.78) min,徒手X 线辅助组 (对照组) 为 (101.59±38.87) min,试验组手术时间明显延长。这与机器人手术中增加了机器人设备组装等步骤有关,对于此类较为简单的胸腰椎内固定手术,因为大多数医师操作比较熟练,总体手术时间较短,机器人设备组装相关的时间消耗就会被凸显出来,而在那些较为复杂的脊柱内固定手术中,机器人的辅助不仅不会延长手术时间,还会因为机器人的辅助缩减术中调整钉道及反复透视浪费的时间,使得整体手术时间缩短,手术更加流畅
。
五、辐射暴露的研究
既往研究中已经证实机器人辅助技术在复杂脊柱手术中可以减少患者和医护人员在手术中受到的辐射量,比如上颈椎融合、颈椎椎弓根置钉、畸形椎体椎弓根置钉、脊柱肿瘤椎弓根置钉、经皮椎弓根置钉等。本研究结果与以往研究略有不同,尽管试验组 (采取的置钉方式为骨科机器人辅助下置钉)和对照组 (采取的置钉方式为 X 线透视辅助下徒手置钉) 术中辐射剂量的差异无统计学意义,但是仍能看到在经肌间隙机器人辅助置钉术中总的辐射剂量是略高于传统徒手置钉的。这可能与如下因素有关:首先,经肌间隙徒手置钉在积水潭医院脊柱外科是一项常规技术,很多医师都已经熟练掌握这一技能,X 线透视辅助下徒手置钉过程中并不需要反复的透视。第二,机器人辅助置钉虽然减少了术中透视的次数,但是 3D-C 型臂扫描增加了术中的辐射剂量。但是,考虑到术中进行 3D-C 型臂扫描时医护人员可以暂时躲避到有辐射防护的区域,结合既往的研究结果,相信经肌间隙置钉时,机器人辅助的方式仍能有效地减少医护人员所受到的辐射暴露。
宜科公司的战略布局随市场需求的变化而转变,之前宜科致力于自动化领域的深耕,以硬件产品的研发为主,而目前则将重点放在自动化与信息化技术的深度融合上,这也正是宜科的核心竞争力所在。宜科接下来会依托于德国技术团队,将工业软件作为重要发展方向,在继续促进IT与OT深度融合的同时,通过IoT HubTM工业互联网赋能平台打造轻量级数字化工厂,有针对性地满足客户的需求,加速智能化解决方案的落地。
六、术中出血量的比较
试验组患者术中出血较对照组更少,但差异无统计学意义。机器人辅助下经肌间隙置入导针及椎弓根螺钉,其操作过程改变了传统的手术入路,对骨性结构的暴露减少,同时也减少对椎旁肌肉的医源性损伤,降低了手术部位的疼痛,减少远期并发症。多数学者认为机器人辅助下置入导针,可以在有软组织覆盖的前提下直接到达进针点,这使得椎弓根螺钉的进钉点不需要进行骨性结构的暴露,不需要电刀剥离并显露横突根部及关节突外侧骨面。因此,它避免了医源性损伤椎旁肌肉、关节囊以及韧带复合体,从而减少了对患者背部软组织的损伤,更好地保留了后方软组织的张力带作用
。由于无神经损伤的胸腰椎单节段骨折,不需要行椎板减压,故机器人辅助经肌间隙入路的方法均可应用于此类患者,且机器人辅助下操作,对进针点局部骨质暴露更少,软组织损伤更小。本研究中试验组术中出血更少也可以作为这一观点的佐证,但两组间尚无统计学差异,仍需进一步研究确认相关观点。
七、疼痛症状的缓解
骨折部位的 VAS 评分,两组间在术前和术后均表现为疼痛症状明显缓解,均无统计学差异,可认为机器人辅助手术的方式对于缓解此类骨折造成的疼痛与传统手术方法并无差异。徒手 X 线透视辅助组并发症发生率较高,伤口延迟愈合 2 例,不愈合深及皮肤和皮下组织,经反复换药,分别于术后4 周、6 周愈合;机器人辅助组没有出现类似的并发症。因为样本量较小,差异无统计学意义。
八、医疗经济学的考量
骨科手术机器人是集基础和临床医学、人体工程学、机械电气工程学及计算机科学等多学科于一体的高科技医疗器械产品,市场上骨科手术机器人的价格普遍较高,医院要考虑收支平衡,市场要讲究实际效益。单从骨科机器人售价和手术费用来看,机器人辅助骨科手术似乎并不是最“经济”的选择。然而,如果从整体诊疗费用来看,未必不“经济”。机器人辅助置钉减少了并发症的发生,避免了并发症治疗期间患者可能遭到的痛苦和所承受的经济负担。通过机器人辅助和远程医疗,不同级别的医院能达到同质化的治疗效果,患者在基层医院得到妥善治疗,避免了一定要到北京或其它医疗资源集中的大城市就医的交通费用和相关社会问题。所以,手术机器人带来的改变是颠覆性的,如果因为临床实践初期相对费用较高就放弃使用,可能会阻碍我国相关高科技医疗产业的发展。
九、存在的不足
本研究存在一些局限性。(1) 因为患者的主观要求及经济情况等因素导致研究的分组不是随机的。但考虑到两组患者术前相关基础数据无明显差异,且均为无神经症状的胸腰椎骨折患者,本研究仍有一定的参考价值。(2) 本研究的样本数量较少,这可能与试验组和对照组之间诸如术中出血量的差别未显现出统计学差异有关。在进一步的研究中,将在更大的人群样本中进行相关临床研究。(3)机器人辅助置钉组使用的均为空心多轴螺钉,而多轴螺钉对骨折复位的作用只能依靠螺钉之间的撑开和对连杆弧度的调整。相反,由于单轴螺钉的钉尾与连杆可以形成稳定的直角,在理论上具有更好的复位效果。虽然本研究中的结果证实两组之间伤椎椎体高度恢复和椎管内占位减少的效果没有显著差异,但今后仍然需要进行更多的比较研究以进行评估。(4) 在临床实践中,近年来出现了设计更为新颖的椎弓根内固定系统,比如单平面空心椎弓根螺钉 (钉尾只在单一平面存在摆动),也许在某些病例中对骨折复位会有更好的效果。因此,利用这些新系统和新技术进行研究并设计更严格的 RCT 研究仍然是非常必要的。
综上所述,机器人辅助经肌间隙椎弓根螺钉内固定手术是一种有效、可靠治疗胸腰椎骨折的方法。此方法可以提高置钉的准确性,减少医务工作者的辐射暴露,确保骨折复位的效果,减少术中调整钉道对患者造成的损伤,尽管目前机器人辅助脊柱外科手术的推广遇到一些瓶颈,但仍然相信,随着技术和设备的发展以及更多的临床医师熟练掌握这种技术,其软组织侵袭性小等优势将更加突出,机器人辅助脊柱外科手术的应用范围将更加广泛。
[1]Carl AL, Tromanhauser SG, Roger DJ.Pedicle screw instrumentation for thoracolumbar burst fractures and fracturedislocations[J].Spine, 1992, 17(Suppl 8):S317-S324.DOI:10.1097/00007632-199208001-00018.
[2]赵轶波, 赵晓峰, 范志峰, 等.经椎旁肌间隙入路椎弓根螺钉固定与保守治疗轻中度中青年胸腰椎骨折的疗效比较[J].中华创伤骨科杂志, 2021, 23(1):39-46.DOI: 10.3760/cma.j.cn115530-20201126-00729.
[3]Siebenga J, Leferink VJ, Segers MJ, et al.Treatment of traumatic thoracolumbar spine fractures: a multicenter prospective randomized study of operative versus nonsurgical treatment[J].Spine, 2006, 31(25):2881-2890.DOI: 10.1097/01.brs.0000247804.91869.1e.
[4]Wang ST, Ma HL, Liu CL, et al.Is fusion necessary for surgically treated burst fractures of the thoracolumbar and lumbar spine? A prospective, randomized study[J].Spine, 2006,31(23):2646-2653.DOI: 10.1097/01.brs.0000244555.28310.40.
[5]Cho WS, Chung CK, Jahng TA, et al.Post-laminectomy kyphosis in patients with cervical ossification of the posterior longitudinal ligament: does it cause neurological deterioration[J]? J Korean Neurosurg Soc, 2008, 43(6):259-264.DOI: 10.3340/jkns.2008.43.6.259.
[6]杨飞, 卢苇, 武永刚.Wiltse 肌间隙入路与传统入路治疗胸腰椎骨折的比较[J].中国矫形外科杂志, 2018, 26(10):903-908.DOI: 10.3977/j.issn.1005-8478.2018.10.09.
[7]张建新, 王文超, 汲长蛟, 等.经皮椎弓根螺钉内固定术治疗无神经损伤的青少年胸腰椎骨折 20 例临床分析[J].山东医药, 2018, 58(9):81-83.DOI: 10.3969/j.issn.1002-266X.2018.09.027.
[8]Sasaki M, Aoki M, Nishioka K, et al.Radiculopathy caused by osteoporotic vertebral fractures in the lumbar spine[J].Neurol Med Chir (Tokyo), 2011, 51(7):484-489.DOI: 10.2176/nmc.51.484.
[9]Nakajima H, Uchida K, Honjoh K, et al.Surgical treatment of low lumbar osteoporotic vertebral collapse: a single-institution experience[J].J Neurosurg Spine, 2016, 24(1):39-47.DOI:10.3171/2015.4.SPINE14847.
[10]Yamashita T, Sakaura H, Miwa T, et al.Modified posterior lumbar interbody fusion for radiculopathy following healed vertebral collapse of the middle-lower lumbar spine[J].Global Spine J, 2014, 4(4):255-262.DOI: 10.1055/s-0034-1394124.
[11]Feng S, Tian W, Wei Y.Clinical effects of oblique lateral interbody fusion by conventional open versus percutaneous robot-assisted minimally invasive pedicle screw placement in elderly patients[J].Orthop Surg, 2020, 12(1):86-93.DOI:10.1111/os.12587.
[12]Gertzbein SD, Robbins SE.Accuracy of pedicular screw placement in vivo[J].Spine, 1990, 15(1):11-14.DOI:10.1097/00007632-199001000-00004.
[13]Aoude AA, Fortin M, Figueiredo R, et al.Methods to determine pedicle screw placement accuracy in spine surgery: a systematic review[J].Eur Spine J, 2015, 24(5):990-1004.DOI:10.1007/s00586-015-3853-x.
[14]Jang KS, Ju CI, Kim SW, et al.Screw fixation without fusion for low lumbar burst fracture : a severe canal compromise but neurologically intact case[J].J Korean Neurosurg Soc, 2011,49(2):128-130.DOI: 10.3340/jkns.2011.49.2.128.
[15]涂洪波, 柳峰, 赵建华.后路经皮椎弓根钉内固定术与经肌间隙椎弓根钉内固定术治疗胸腰椎骨折的比较[J].创伤外科杂志, 2018, 20(4):258-262.DOI: 10.3969/j.issn.1009-4237.2018.04.005.
[16]Yoshida G, Kanemura T, Ishikawa Y.Percutaneous pedicle screw fixation of a hangman’s fracture using intraoperative, full rotation, three-dimensional image (O-arm)-based navigation:a technical case report[J].Asian Spine J, 2012, 6(3):194-198.DOI: 10.4184/asj.2012.6.3.194.
[17]Verma R, Krishan S, Haendlmayer K, et al.Functional outcome of computer-assisted spinal pedicle screw placement:a systematic review and meta-analysis of 23 studies including 5992 pedicle screws[J].Eur Spine J, 2010, 19(3):370-375.DOI:10.1007/s00586-009-1258-4.
[18]Tian W, Fan MX, Liu YJ.Robot-assisted percutaneous pedicle screw placement using three-dimensional fluoroscopy:a preliminary clinical study[J].Chin Med J (Engl), 2017,130(13):1617-1618.DOI: 10.4103/0366-6999.208251.
[19]Carbone JJ, Tortolani PJ, Quartararo LG.Fluoroscopically assisted pedicle screw fixation for thoracic and thoracolumbar injuries: technique and short-term complications[J].Spine,2003, 28(1):91-97.DOI: 10.1097/00007632-200301010-00021.
[20]Assaker R, Reyns N, Vinchon M, et al.Transpedicular screw placement: image-guided versus lateral-view fluoroscopy:in vitro simulation[J].Spine, 2001, 26(19):2160-2164.DOI:10.1097/00007632-200110010-00024.
[21]Chan A, Parent E, Narvacan K, et al.Intraoperative image guidance compared with free-hand methods in adolescent idiopathic scoliosis posterior spinal surgery: a systematic review on screw-related complications and breach rates[J].Spine J,2017, 17(9):1215-1229.DOI: 10.1016/j.spinee.2017.04.001.
[22]Kim HJ, Lee SH, Chang BS, et al.Monitoring the quality of robot-assisted pedicle screw fixation in the lumbar spine by using a cumulative summation test[J].Spine, 2015, 40(2):87-94.DOI: 10.1097/BRS.0000000000000680.
[23]van Dijk JD, van den Ende RP, Stramigioli S, et al.Clinical pedicle screw accuracy and deviation from planning in robot-guided spine surgery: robot-guided pedicle screw accuracy[J].Spine, 2015, 40(17):E986-E991.DOI: 10.1097/BRS.0000000000000960.
[24]Mroz TE, Abdullah KG, Steinmetz MP, et al.Radiation exposure to the surgeon during percutaneous pedicle screw placement[J].J Spinal Disord Tech, 2011, 24(4):264-267.DOI:10.1097/BSD.0b013e3181eed618.
[25]田野, 张嘉男, 陈浩, 等.脊柱机器人与传统透视辅助下微创经皮复位内固定术治疗单节段无神经症状胸腰椎骨折对比研究[J].中国修复重建外科杂志, 2020, 34(1):69-75.DOI:10.7507/1002-1892.201905057.
[26]赵永辉, 陈太邦, 蔡兴博, 等.比较经皮和传统开放及肌间隙入路治疗胸腰椎骨折的疗效[J].中国骨与关节杂志, 2021,10(1):46-51.DOI: 10.3969/j.issn.2095-252X.2021.01.009.
猜你喜欢
中国典型病例大全(2022年12期)2022-05-13
中国药学药品知识仓库(2021年18期)2021-02-28
中外医疗(2020年19期)2020-10-09
保健与生活(2020年1期)2020-05-07
机器人产业(2020年1期)2020-04-16
健康前沿(2019年8期)2019-09-10
中外医学研究(2019年18期)2019-08-19
科技资讯(2016年9期)2016-05-14
中国当代医药(2015年2期)2015-03-11
上海医药(2014年9期)2014-06-27