
采摘机器人对猕猴桃果实硬度触觉感知研究
2022-08-29 12:52严正红
黑龙江工业学院学报(综合版) 2022年7期
严正红,陈 琳,2
(1.安徽国防科技职业学院 电气技术学院,安徽 六安 237011;2.合肥工业大学 电子科学与应用物理学院,安徽 合肥 230002)
随着触觉感知技术在农业机器人领域的应用,硬度作为果实重要的物理属性之一,会影响采摘机器人在实际采摘时抓握策略的实施。国内外已有大量对不同硬度果实的检测与抓持研究,Shiuh-Jer[1]等人利用FPGA设计了基于位置控制的末端执行器,并构建模糊控制系统完成对不同软硬物体的抓取和释放等操作。Oveisi[2]等人对贮藏期梨进行研究,提出利用声振法建立多元线性回归模型对梨果实的硬度进行检测。张颖[3]等人运用3D打印技术制作仿人机械手,利用电流传感器对物体硬度进行感知,成功实现了对软烂、新鲜水果的分捡。余乐[4]等人利用薄膜压力传感器采集物体接触信息,提出卷积神经网络模型对物体软硬度进行感知识别。
为提高采摘机器人抓取的触觉感知能力,利用触觉传感器采集接触信息,通过信息处理与特征提取,提出基于KNN算法的识别果实硬度模型,解决了采摘机械手难以区分果实软硬度的问题,可实现农业机器人智能化采摘与分拣作业。
1 数据采集系统平台
1.1 触觉采集系统
实验平台以WEISS公司生产的WTS4*6的阵列触觉传感器和德国雄克公司生产的WSG50二指夹持器搭建机器人抓取信息采集系统。其中,触觉传感器是由4行6列的压力单元组成的阵列,可实时测量接触点的正向压力值,其内嵌在夹持器的两指上,如图1所示。
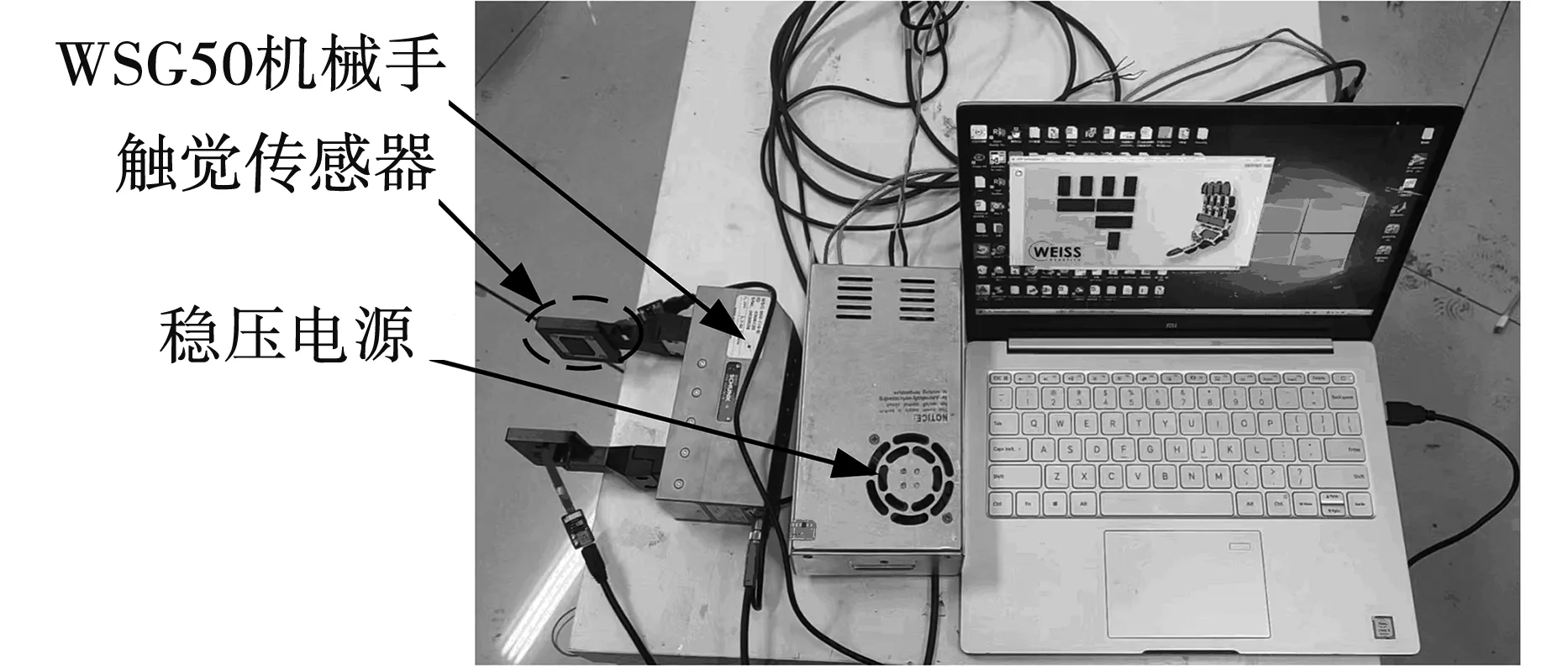
图1 机械手触觉抓取系统
1.2 实验材料
采用陕西省眉县生产的徐香猕猴桃果实(果型整齐,呈现圆柱形,长径55~60mm,短径45~52mm,单果的重量在100~120克)。果实硬度主要是利用硬度计来检测的,但其检测方法为破坏性检测,会影响实验抓取效果。所以,为确定样本硬度等级,选择成熟度不同的猕猴桃,并通过5名志愿者利用自身的主观感受进行硬度排序,然后将样本按硬度排序情况平均分成四个等级并贴上标签:硬(A)、较硬(B)、较软(C)、软(D)。每个等级里有5个猕猴桃,样本果实共20个。
2 数据预处理与特征提取
2.1 数据集采集
利用搭建好的机器人触觉柔性抓取平台对样本果实进行夹持作业。当机械手与果实表面接触后,随着机械手缓慢匀速闭合,指端触觉传感器可实时采集传感器数据并保存在后端。为保障信息的可靠性,剔除受干扰实验组,每个样本重复有效抓取20次,共400组原始数据集。
2.2 数据预处理
由于采集信息的传感器是由4×6矩阵压力触觉,其采集到的数据特征是矩阵图像。为了减少数组维度,利用平均值μ和标准差σ表征所采集每帧矩阵数组的特征。随着机械手与样本的接触时间推移,一系列的接触数据特征集可用Z表示:
Zμ={μ1,μ2,…,μN}
(1)
Zσ={σ1,σ2,…,σN}
(2)
经预处理后的数据仍然是高维时间特征序列集,若将该特征集直接用于对果实的抓取识别,将会增加识别模型的计算时间和难度。所以,需要对特征集进一步的进行降维处理。
2.3 基于主成分分析法的特征提取
主成分分析算法作为一种基于统计特征的降维方法,在模式识别领域被普遍应用[5-6]。其具体步骤如下。
(1)N个样本P维的原始数据矩阵表示为:
X={X1,…,XN}
(3)
式(3)中,Xi={x1,…,xp}表示任意一次抓取的触觉序列。
(2)计算样本协方差:对样本进行归一化处理后,协方差矩阵如式(4)所示。
(4)

|λ1|≥|λ2|≥…≥|λp|≥0
(5)
(4)选择p个主元,根据公式(6)计算累计方差贡献率。
①石羊河民勤蔡旗断面下泄水量由治理前的0.98亿m3增加到2.5亿 m3以上,最高达到 2.9亿 m3,民勤盆地地下水开采量由5.17亿m3减少到0.89亿m3;六河中游地表供水量由9.72亿m3减少到8.82亿m3,地下水开采量由7.47亿m3减少到4.18亿m3,基本实现六河水系中下游地下水采补平衡,民勤青土湖地区地下水水位开始回升,累计上升0.77 m,青土湖出现了最大15km2的季节性水面,生态系统恶化趋势得到有效遏制。
(6)
利用主成分分析方法对各样本数据集的μ、σ序列分别进行降维处理,并计算出累计方差贡献率,其具体随主成分数目的变化情况,如图2所示。
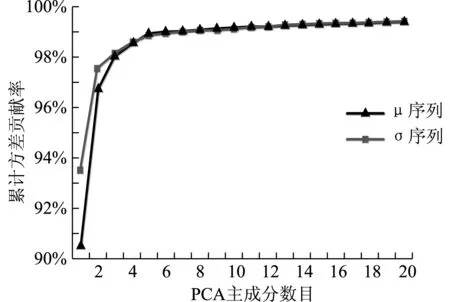
图2 累计方差贡献率变化
从图2可知,当主元成分量p=5时,μ序列和σ序列的累计方差贡献率均达98.65%,此时数据的维度降比恰好为40:1;随着主元成分量的增大,累计贡献率变化不明显。所以,为了便于比较在不同特征集下的硬度识别效果,本文提取前5个主成分构成新的特征集,供分类器训练与测试用。
3 猕猴桃硬度KNN识别
3.1 KNN算法理论
K-近邻分类法(K Nearest Neighbor,KNN)是一种成熟的模式识别算法,也是机器学习模式识别中应用最为广泛的一种分类算法[7-8]。其主要思想可概括为:将已经标记好标签的训练样本数据集用作参考,选择一种距离方法来计算待测样本与所有训练样本间的距离,选择与待分类样本点最近的K个邻居样本,最后以K个最近的样本中占大多数的类作为未知样本的归属类,即为“近朱者赤,近墨者黑”的思想。如图3所示,在基于距离的二分类算法中,如果已知最近邻的样本类别,就可以对待测样本所属类别进行判别。
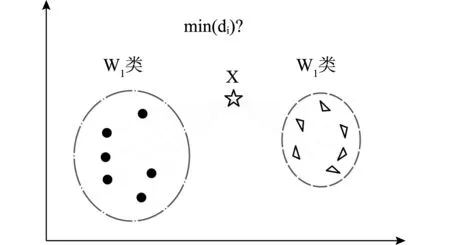
图3 基于距离的二分类示意图
3.2 KNN分类器设计
在选取合适的特征数据集后,机器人对猕猴桃果实硬度感知识别KNN算法实现的具体步骤如下。
(1)构建样本训练数据。经过预处理和PCA特征提取后的400组特征数据集,从中随机选取的300组数据作为训练集,以数组的方式存储在内存中。
(2)设定参数k的初始值。k值参数利用宏定义来设定,方便参数的调整。由于k值的设定直接会影响识别结果的准确性,可能会出现待测样本归结于多个硬度等级,设定参数通常取奇数,文中K=1,3,5,7,9。
(3)从训练样本数据集中选出与测试样本距离最近的K个样本,其中距离的度量为欧式距离。以样本序列X和Y为例,欧式距离计算方法为:
(7)
(4)遍历训练样本集。计算训练特征集与测试特征集的欧式距离,通过比较计算的欧式距离与队列中最大欧式距离,确定优先级队列。然后计算优先级队列中k个元组的多数类,并将其作为测试元组的类别。
(5)计算误差率,继续设定参数k值,重新训练,最终取误差率最小的k值。
在数据采集系统中,机器人末端执行器采用的是二指夹持器,在数据采集过程中,将指端均集成有触觉传感器。在每一次的抓取样本每个传感器采集的数据都可获得Zμ和Zσ序列集,双触觉采集的序列集为:
Z={Zμ,l,Zμ,r,Zσ,Zσ,r}
(8)
式(8)中,Zμ,l,Zμ,r,Zσ,Zσ,r分别表示左指μ特征序列、右指μ特征序列、左指σ特征序列、右指σ特征序列。
针对单一触觉进行欧式距离计算。以左指特征序列为例。
(9)
(10)
式(9)、式(10)中,ωμi,l、ωσi,l为归一化处理数据,使得测量距离在[0,1]范围内。
对于双触觉特征序列进行欧式距离计算的情况,以μ序列为例,即:
drl,1=dμl,1(Zμ,l1,Zμ,l2)+dμr,1(Zμ,r1,Zμ,r2)
(11)
4 结果与分析
在前期数据采集中,对于20个标有硬度等级的猕猴桃抓取,共获取400组原始数据集。经过预处理和PCA特征降维后,随机选70%特征集用作训练样本集,剩余30%特征样本集用于测试。将测试组数据输入已经训练好的分类器来检测所设计分类器的识别性能。为了量化分类效果,使用10倍交叉验证,并统计不同K值和特征序列下的模型识别准确率。
如表1所示,在两种特征序列下分别利用左指触觉传感器信息、右指触觉传感器信息、双指触觉传感器信息的特征数据对猕猴桃硬度属性检测识别均有一定的识别率。其中,双指触觉传感器信息用于分类识别的效果要比单个手指触觉信息好,右手采集到的触觉识别效果略好于左手采集的触觉识别效果,这可能是因为抓取操作方式的影响。从表中可以看出,当K=1、3、5、7时,随着K值得增大,感知识别准确率降低;当K=9时,各触觉特征信息的识别效果稍微趋好。此外,对于基于μ特征序列识别率要比σ特征序列的识别准确率略高。
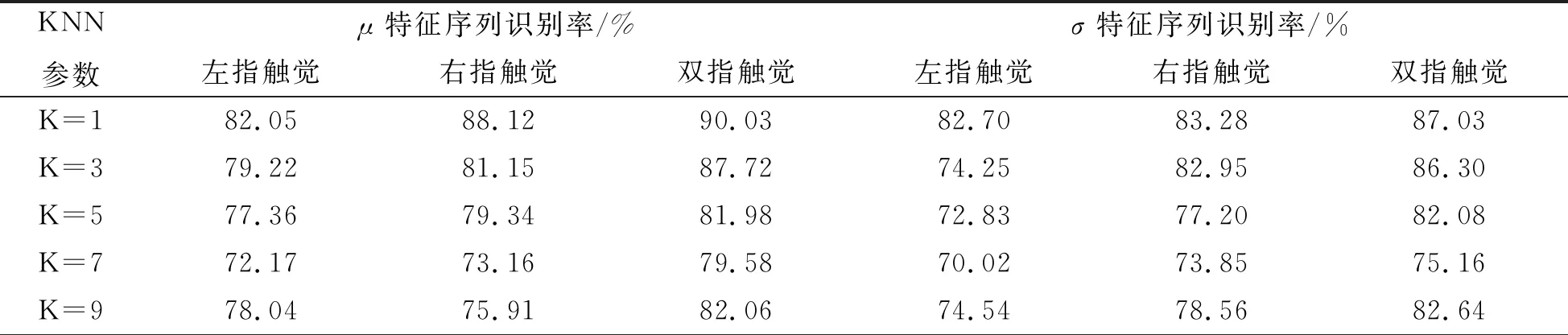
表1 不同特征序列下KNN模型识别准确率
由以上对于KNN算法模型识别效果的分析可知,当K=1时的分类效果最好,且利用双指触觉特征信息识别准确率为90.03%。为了进一步分析探究特征数据集对猕猴桃果实硬度感知识别效果,将K=1时,μ特征序列下的三种触觉信息识别混淆情况统计分析。
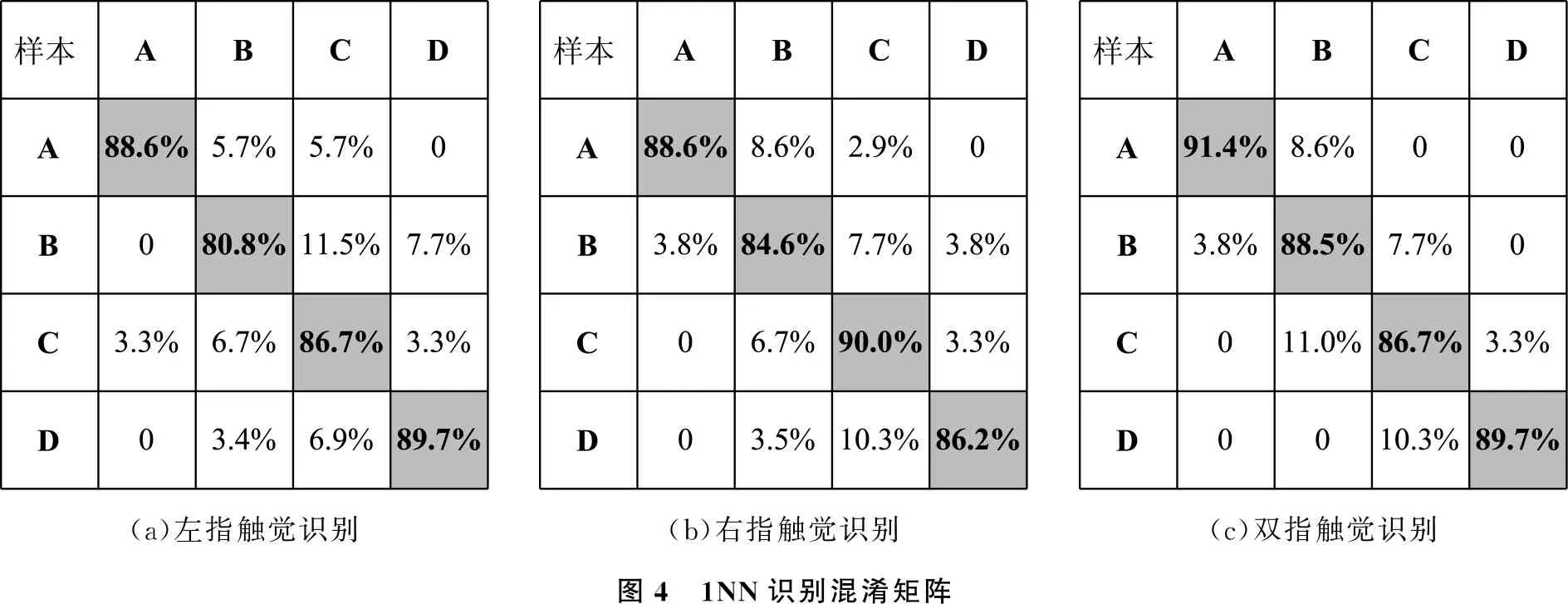
(a)左指触觉识别(b)右指触觉识别(c)双指触觉识别图4 1NN识别混淆矩阵
如图4所示,根据统计绘制出具体混淆矩阵。对于能够准确识别的硬度等级出现在混淆矩阵的对角线上,对于识别错误的也会出现在相应的位置上。通过对比不同手指间触觉信息的识别效果,可得出基于双指触觉识别效果相对来说更好的结论。在双指触觉识别中,对于猕猴桃硬度等级A、B、C、D的识别准确率分别为91.4%、88.5%、86.7%、89.7%。在误识别中,将A等级硬度误认为是B等级的概率为8.6%,B等级误认为是A等级和C等级的概率分别为3.8%、7.7%,C等级误认为B等级和D等级概率分别为11%、3.3%,D等级误认为是C等级的概率为10.3%,由此可得出硬度等级相近的更容易互相错识别的结论。
5 结论
为提高采摘机器人对果实的硬度感知识别能力,提出基于主成分分析与KNN算法的猕猴桃果实感知识别方法。该方法利用搭建好的触觉采集系统采集机械手与果实样本的接触信息,随后针对高维数据进行预处理与特征提取,并将特征集输入到KNN算法模型中,进行训练与测试。经统计分析,基于主成分分析的算法能够成功实现抓取触觉数据集的维数约简,找到最能反映接触果实过程的特征。不同K值下,双指触觉传感器信息用于分类识别的效果要比单个手指触觉信息好,其最优分类识别准确率为90.03%。对于机器人抓取识别误判情况,主要存在于硬度等级相近的果实之间。基于PCA-KNN算法模型果实硬度识别方法,对于农业机器人触觉感知研究具有一定的工程意义。
猜你喜欢
东北大学学报(社会科学版)(2022年1期)2022-02-17
快乐语文(2021年36期)2022-01-18
今日农业(2021年11期)2021-11-27
海外星云(2021年6期)2021-10-14
动漫星空(兴趣百科)(2020年12期)2020-12-12
炎黄地理(2017年10期)2018-01-31
好孩子画报(2017年12期)2018-01-06
红豆(2017年4期)2017-04-13
电脑爱好者(2015年17期)2015-09-10
绿色科技(2015年4期)2015-04-22
