
基于路面车辙自动化检测数据的质量管理流程分析
2022-08-27 04:21丁鹏
交通科技与管理 2022年16期
丁 鹏
(贵州省公路工程集团有限公司,贵州 贵阳 550001)
0 引言
路面技术状况的数据质量评估,可为公路养护管理机构资源分配、资金申请、方案制定、技术落实等提供参考。路面技术状况数据检测单位必须采取可靠的数据采集措施,提高路面技术状况数据质量[1-3]。现阶段,路面车辙自动化检测手段主要包括车辙点激光采集法和车辙线激光采集法两种。该文以车辙点激光采集法为基础,通过构建全过程数据质量管理流程,为检测机构和管理机构提供科学、有效、准确的路面技术状况数据,为相关问题的解决提供依据。
1 数据质量的全过程管理
数据质量控制需以完整的控制计划为基础,并分阶段差异化实施管控策略。项目准备阶段,通过前期项目会议与协商,明确质量控制要点,出台质量保障计划为后续工作奠定基础;数据采集阶段,落实数据质量控制策略,实时监控数据采集质量;数据后处理阶段,加强质量检测与后续处理,提高数据规范性,保障数据质量。
各目标指标检测的质量管理通用流程如图1所示,数据采集前需进行校准测试、设备认证和运行测试,确保被采集指标符合规范要求,保障采集数据达标。

图1 全过程质量管理
2 车辙检测装置的标定(项目准备阶段)
多点共梁式车辙检测装置被广泛应用于路面车辙检测,该装置依托车辙梁和激光发射装置实时检测激光器与地面距离,并获取道路横断面曲线,自动换算车辙深度数据[4-6]。
(1)车辙检测横断面数量需大于13个,以提高检测准确性,一般在车辙梁两侧倾斜安装激光发射器2~3个,控制车辙梁宽度在合理区间,不同激光发射器位置不可处于同一水平面,特定激光发射器需与其他激光发射器保持一定角度。
(2)测量道路横断面,需提前获取不同激光器安装角度及其相对高度数值,并借助几何换算确定安装位置,通过位置调整或角度差降低可能由此导致的测量误差,提高测量精密度。
(3)表1为某多点共梁式车辙检测装置激光器3次纵向测量间距的结果。对检测数据分析可知,8号激光器的检测参数标准差过大,可能由于其质量问题导致,经核实,该激光器使用年限超标,数据检测精度不足,使用稳定性不佳。

表1 标定结果
将原有8号激光器更换后,重新标定结果显示,标准偏差大幅度减小(见表2)。

表2 标定结果(激光器更换后)
3 数据实时检查(车辙数据采集阶段)
检测设备是否出现故障是进行数据实时检查的主要目的,当系统故障或技术人员操作不规范时及时给出警告,提示异常信息来源以找出设备故障项并修正。基于路面车辙模型工作原理,该文对车辙传感器故障情况下数据异常值进行针对性判断[7-8]。
(1)车辙典型断面判断:典型车辙横断面表现为“W”形和“U”形,无车辙路面其横断面并不符合上述两种类型,需对其深度是否达到阈值加以判断。
(2)相邻点高差判断:车辙横断面多为连续、渐进曲面,相邻断面监测点高度差无明显差异,根据经验分析,如果相邻车辙横断面监测点高差超过设定阈值15 mm,则表明存在数值异常或设备故障。横波变化和转弯可能导致检测中车辙面与路面存在角度差,因此对相邻监测点高差评估时,需先进行线性回归。
(3)传感器读数判断:判断传感器显示数据是否超过判断量程,评估有无数据异常。个别传感器示数可能存在异常,可改变输出电压或间隔一段时间后重新检测,观测示数有无变化。数据实时检查判断流程图如图2所示。

图2 车辙实时检测
4 时间序列上比较(车辙数据后处理阶段)
路面状况数据具备时间规律性,路况衰减模型是否合理,决定了新检测数据是否与原数据兼容,路况衰减模型的建立,对评估道路养护措施效果、合理分配养护资金、制定多年规划等有指导意义,同时还可作为数据质量监控的有效手段[9-10]。
对东部某省份2015—2017年期间S20上行检测车辙深度数据对比分析,详见图3。结果显示,每年检测集中时间为6月份,三年来车辙深度数据呈现出明显规律性,每千米单元车辙深度不同年份存在差异,2016年车辙深度大于2015年车辙深度,2017年车辙深度数据小于2016年车辙深度,2016年数值最大,2017年数据最小,两者差值为4.3 mm。

图3 2015—2017年期间历史数据对比(千米单元)
以RDit表示第i个路段t检测时间对应的每千米单元车辙深度数据,将当年检测RDit数据与上一年度RDit-1数据对比,并用ΔRDit来表示两者差值,分别计算出2015—2017年期间不同年份每千米单元车辙深度及相邻年份差值,统计路段差值在所有路段中的比例,详见表3。相比于2016年,2017年车辙深度减小不足1.5 mm,2016年路段车辙深度增加。

表3 差值对比
不同年份车辙每千米单元车辙深度数据检测时间大体一致,综合分析可知2016—2017年间未对该路线上行进行养护,故2017年出现了车辙深度大幅减小,该情况与理论状况有较大出入。进一步核实后发现,2017年设备进行年计量认证时,计量站的标定方程如下:

式中,X和Y分别为原始结果和换算结果。根据表达式(1),2017年检测结果及不同年份对比经标定后的数据如图4所示。
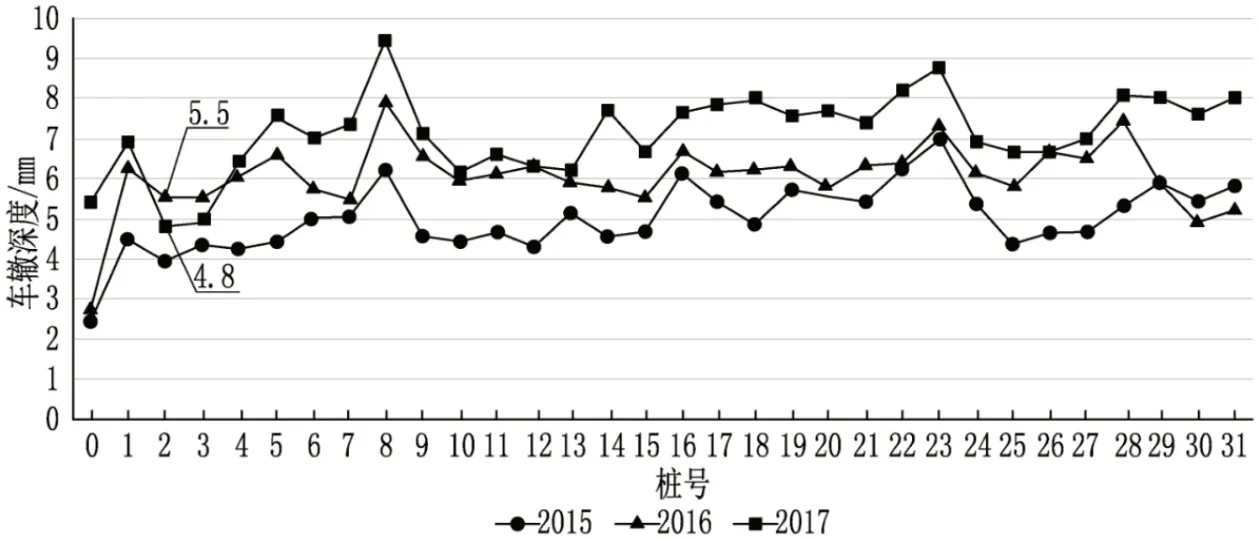
图4 2017年检测结果及不同年份数据对比(千米单元)
5 结论
综上所述,路面车辙自动化检测应覆盖质量管理全流程,该项工作对确保数据质量至关重要。该文采用实例分析法结合车辙自动化激光检测法,进行全过程数据质量控制。论述了项目准备阶段、数据采集阶段、数据后处理阶段的流程与方法。通过对异常值判断及处置方法的分析,确保路面技术状况数据在车辙检测装置标定、数据实时检查和时间序列比较面的规范性,为确保数据质量提供参考。基于路面车辙自动化检测数据控制,对改善路面技术状况数据质量意义深远,提高了网级和项目级层面路面决策科学性,为路面养护提供参考。
猜你喜欢
趣味(作文与阅读)(2021年9期)2022-01-19
山东交通科技(2020年1期)2020-07-24
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
石油沥青(2019年6期)2020-01-16
江西建材(2018年4期)2018-04-10
中华老年口腔医学杂志(2016年6期)2017-01-15
北方交通(2016年12期)2017-01-15
光学精密工程(2016年5期)2016-11-07
工业设计(2016年4期)2016-05-04
