
基于行车风险场的换道行为分析
2022-08-27 04:20徐嘉琪徐伟健
交通科技与管理 2022年16期
徐嘉琪,徐伟健
(中南大学 交通运输工程学院,湖南 长沙 410075)
0 引言
换道行为是驾驶员受周围车辆车速、间距等周边环境刺激,产生换道意图[1-3],调整并完成自身驾驶目标的行为,而对其分析研究则有助于减少在车联网环境[4]下由于车辆换道而引发的安全事故[5-6]。
目前许多学者对换道行为的分析已做了很多研究,澳大利亚人吉普斯(Gipps,P.G.)建立了换道决策结构框架,提出了Gipps换道模型[7];Li等利用元胞自动机模型对双车道下激进型驾驶员的换道行为进行了研究[8];Errampalli M等人基于模糊推理理论,提出了一种微观换道模型[9];牛国臣等利用五次多项式模型对换道轨迹进行了规划[10];王永明等提出了STCA-I模型,引入风险度,并提出弹性安全换道距离概念[11]。综上,当前学界在此已建立有诸多分析模型,但大多基于车辆换道的原始数据,缺少对其进一步的处理转换,致使模型的直观性有所缺失,进而难以发现触发换道的场景共性。
针对以上问题,文中将车辆换道的原始数据转换成行车风险场,引入“场”的概念对换道过程行车风险进行分析,研究驾驶人的左右换道行为及其动机。
1 自然驾驶换道场景的提取
文中基于由德国亚琛工业大学汽车工程研究所发布的highD数据集提取换道场景。该数据集搜集了德国科隆附近六个不同地点的11.5 h测量值和110 000台车辆,所测总行程为45 000 km,从中提取了5 600条完整换道记录。
提取完整换道的三个阶段,即准备阶段、执行阶段、结束阶段。当换道航向角连续三个采样点小于阈值θth=0.02 rad时,选取首个采样点为准备阶段;当换道车辆正中心与车道线相交时,选取首个采样点作为执行阶段;当车辆换至另一车道上,且车辆航向角连续三个采样点小于θth时,选取末个采样点为结束阶段。
以换道车辆所在道路断面与车道线的交点为中心,选取左右宽度9 m、前后长度共67 m的矩形,框选出换道车辆及其周围环境信息,以综合把握换道过程中车辆移动状态及原车道与目标车道空间占用的变化情况。而为研究方便,文中统一以下行车辆的换道数据为例展开分析。
2 行车风险场模型
2.1 模型组成
行车风险场是将风险类比于“场”的一个数学模型,可定量描述车辆行车过程中自身及周围的风险状态,因而其思想在换道行为中也愈发受到关注[12-14]。车辆行驶时可能与其他物体发生碰撞[15],文中为研究其概率及强度,构建了行车风险场模型。道路上每个物体都可视作一个场源,向它周围辐射出行车风险场。在人-车-路-环境交互复杂的情形下,这一模型可用以衡量车辆在道路上行驶的安全系数,进而分析其换道的触发条件和持续条件。
行车风险场Es由三部分组成,分别是运动物体构成的动能场EV、静止物体构成的势能场ER和驾驶人构成的行为场ED,其关系可用如下公式表示:

2.2 等效质量
不同于平常所说的质量,等效质量除与物体本身的质量有关外,还与其类型与速度等有关,且对运动和静止的物体都适用,并可用如下公式表示:

式中,Mi——物体的等效质量;Ti——物体类型;mi——物体质量;vi——物体速度;k——速度多项式的项数;αk、βk——待定参数。
2.3 动能场
凡是在道路上具有一定速度的物体,均会在其周围形成动能场。动能场会受到运动物体的等效质量、距离、相对方向、速度等因素的影响。假设运动物体i所处的位置为(xi,yi),则它在此处形成的动能场可用如下公式表示:

式中,EV_ij——运动物体在其周围产生的动能场场强;(xi,yi)为其质心坐标,此处假定x轴沿道路线方向,y轴垂直之;Ri——道路条件影响因子;rij表示运动物体和本车辆间距离的矢量;假设物体i沿着x轴正向运动,θi为物体速度方向与rij的夹角,并规定顺时针方向为正;k1、k2、G均为待定常数且大于0。
依据上述公式,可画出动能场场强示意图。由图1可见,运动物体所在中心处的场强最高;在物体运动方向前方,动能场场强逐渐减弱,且减弱的斜率随距离的增加而逐渐下降;而在其后方,动能场则骤降为零。在运动车辆的中心处必然发生碰撞,同时在它前方4 m范围内为高风险区域,而后方相对安全。
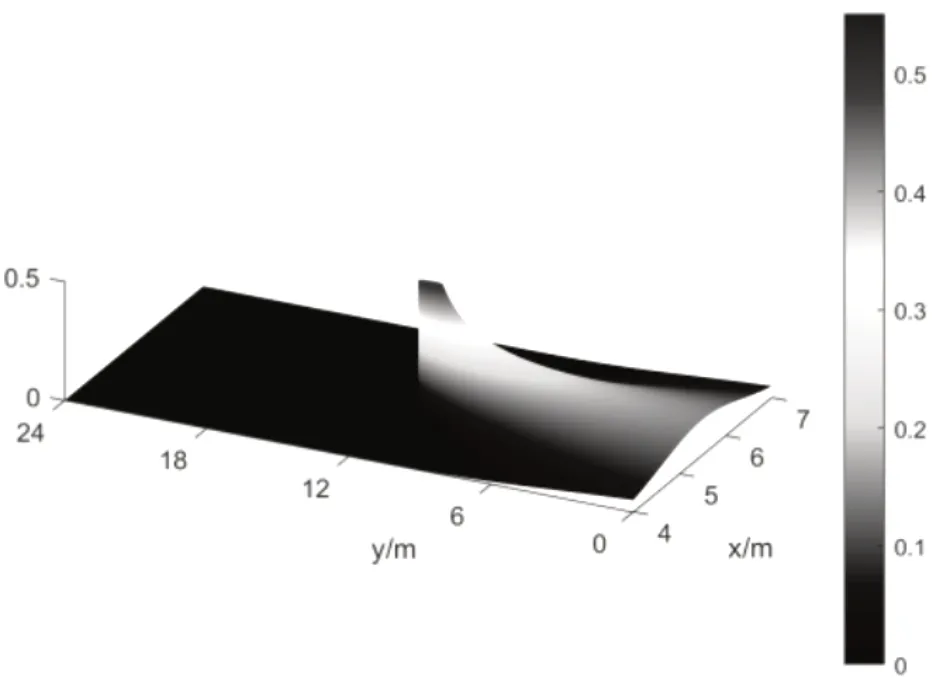
图1 动能场场强示意图
2.4 势能场
凡是在道路上静止的或运动的物体,都会在其周围辐射势能场。势能场受静止物体的等效质量、距离等因素的影响。假设静止物体i所处的位置是在(xi,yi),其在此处及周围产生的势能场ER_ij可用如下公式表示:

依据上述公式,可画出势能场场强示意图。由图2可见,其整体上呈现中间高、四周低的态势,且无方向性向四周递远递减,而在物体中心处半径大约2 m范围内的区域为高风险区域。据此表明,在驾驶车辆时,若处于运动物体的前方,须远离运动物体;而对于静止的物体,若相隔的半径达到一定数值,则相对安全。
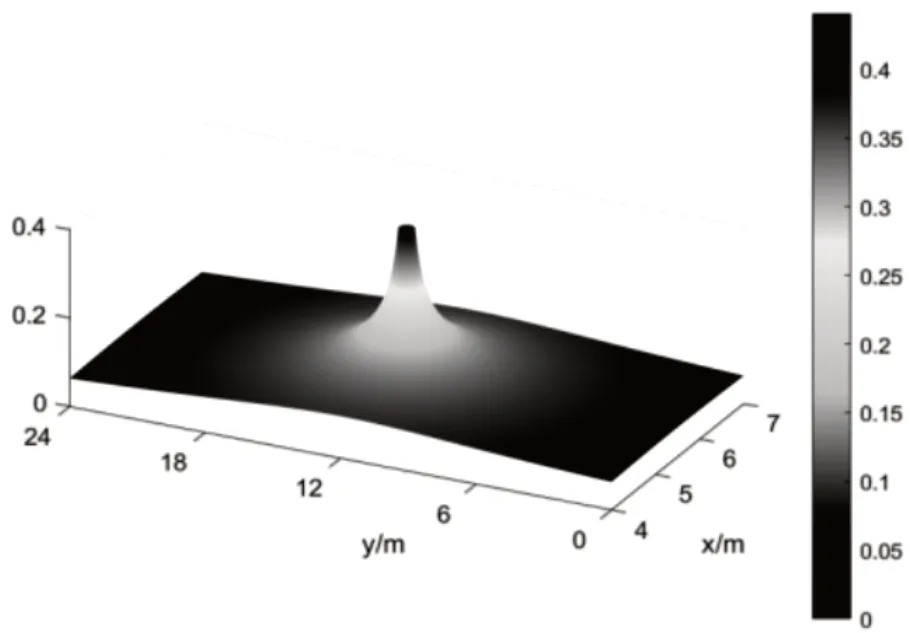
图2 势能场场强示意图
2.5 行为场
2.5.1 概念及模型
凡是在道路上,驾驶人驾驶的车辆都会在其周围辐射出行为场。行为场受到动能场及驾驶人的行为、技能、心理生理、认知、人格特质[16-17]等因素的影响。由于驾驶人执行行为的不确定性,其对周围的其他车辆会存在一定的潜在威胁。驾驶行为产生的行为场可用如下公式表示:

式中,假设车辆i和车辆里面的驾驶人所处的位置为(xi,yi),ED_ij为其在位置(xi,yi)形成的行为场;Dri为驾驶人风险因子[18]。
依据上述公式,可画出行为场场强示意图。由图3可见,运动物体所在中心处的场强最高,为无穷大;在物体运动方向前方,行为场场强逐渐减弱,且减弱的斜率随着距离的增加而逐渐下降;而在其后方,行为场则骤降为零,与动能场场强示意图相似。

图3 行为场场强示意图
2.5.2 驾驶人风险因子
驾驶行为受到驾驶人的生理心理因素、认知因素、违规倾向、驾驶技能的影响,不同驾驶人对车辆的掌控也呈现出个性化的差异性[19-21]。比如,若一个驾驶人驾驶技能不娴熟,对车辆及周围路况把握程度低[22],或处于疲劳状态[23-24]时,其驾驶车辆的风险更大。驾驶人风险因子正是描述这些因素的一个量,可用如下公式表示:

式中,Dri——驾驶人风险因子;μ1Dri_cognition——认知风险因子;μ2Dri_phy&psy——生理心理风险因子;μ3Dri_laws——违法风险因子;μ4Dri_skill——技能风险因子。μ1、μ2、μ3、μ4为各项因子的权重系数。
2.6 模型构建
在前文所述的行车风险场模型下,一辆车行驶在道路上,还会受到周围其他物体的风险场的“力”的作用,其方向与合场强方向相同,用以描绘该车辆行车的潜在危险大小。其次,该车辆受到的力也与车辆自身运行方向、等效质量、道路条件、驾驶特性[25]有关。假设该驾驶车辆所处的位置为(xi,yi),其在风险场中所受到的作用力可用如下公式表示:

则行车风险场模型表示如下:
式中,Fi——车辆在(xi,yi)处受到的作用力;Ei——行车风险场在i处的场强;Es_i——行车风险场在车辆i位置处的场强和矢量;EV_i、ER_i、ED_i分别为动能场、势能场和行为场在i处的场强合矢量;ER_ni、EV_pi、ED_qi分别为单个势能场、动能场、行为场在i处的场强合矢量。
图4为运动车辆在其周围形成的行车风险场示意图,其值为前面三种场强之和。物体中心处形成的场强最大;在其前方,行车风险场场强递远递减,其速率呈幂函数关系;而在其后方,场强骤降,但并未降至零,在距离物体中心处小范围半径内仍然有场强的值存在,据前文分析,其值应当为该物体的势能场场强。总体来看,运动车辆在危险性上呈现出前方较大、两侧相当、后方较小的特征。

图4 行车风险场示意图
3 安全风险场景分析
3.1 数据预处理
利用前文提出的行车风险场模型,可将每帧驾驶情形的风险场量化。为研究行车风险场场强对驾驶人执行换道行为的影响,文中先提取highD数据集中的换道场景,刻画其中换道车辆周围的风险分布状况。以双向四车道为例,在此不考虑应急车道,左车道为快车道兼超车道,右车道为慢车道兼大中型客货车专用道。为研究车辆在不同风险场中做出的响应策略差异性,下文将分左右换道两种情形,结合驾驶人实际行为,以换道车辆为参考系,借助前文的三阶段划分法展开研究。
3.2 左换道场景
在行车风险场强图中,车辆左换道三个阶段的周围场强分布如图5所示。在换道全过程中,风险场场强最高点始终为换道车辆所在区域,这主要源于换道车辆自身的高速运动和执行阶段可能做出的加速行为所产生的“动能”及其增加,以及在过程中车辆的空间位置变化所导致的“势能”增大。次高区域则在换道车辆前方呈现出多峰特征,并随换道过程的进行从左前到右后产生移动,且强度不断增加,而这一风险场大抵来自原车道的前车阻碍和目标车道前方可能存在的车辆,其风险场随换道车辆的大概率加速致使相对距离的拉近,在增大自身“势能”的同时与换道车辆风险场相叠加,进而得到大幅增强。与之相对的则为换道车辆附近的低风险区域,在准备阶段,它主要分布在车辆左前方至左侧的一段距离,这也是在换道过程中驾驶人可选择插入的安全区间范围;执行阶段,其主要分布在左右两侧及两侧前方较远距离的小段空间;结束阶段,其则分布在右侧与前方。由于左换道过程中后方绝大部分均为低风险区域,且在现实环境下左换道过程较少涉及后方空间,在此不做阐述。

图5 车辆左换道行车风险场
在实际的换道场景中,大多情况下,驾驶人由于受前方障碍物(多为行驶中的前车)的阻碍,而选择执行左换道行为,此时车辆从慢车道驶入快车道。准备阶段,驾驶人主要会对车辆左侧是否存在其他车辆进行确认,以保证留有足够的相对空间;执行阶段,驾驶人确认车辆左侧、右侧及后侧一定区域无其他车辆,确定换道可行,执行左车道换入行为,并一般还伴有一段时间的加速状态;结束阶段,车辆已基本汇入目标车道,且换道车辆的前方与右前方车辆仍基本保持正常行驶,换道行为大致完成。
3.3 右换道场景
在行车风险场强图中,车辆右换道三个阶段的周围场强分布则如图6所示。与左换道相比,右换道过程中风险场场强最高点仍在换道车辆所在区域,其原理亦大体相同;次高区域则主要出现在换道车辆后方的受超车辆上,随换道过程的进行相对于换道车辆从右前到左后移动,且强度有所减弱,应当与换道过程中两车相对距离的逐渐增大有关;低风险区域的分布中,除换道车辆的前方外,在准备阶段主要有其左后方的轨迹空间与右前方的小段安全区域,随着换道行为的推进,后方低风险区域逐渐扩大,二者合一,同时换道车辆左侧也会伴随着换道完成转为较为稳定的低风险区域。
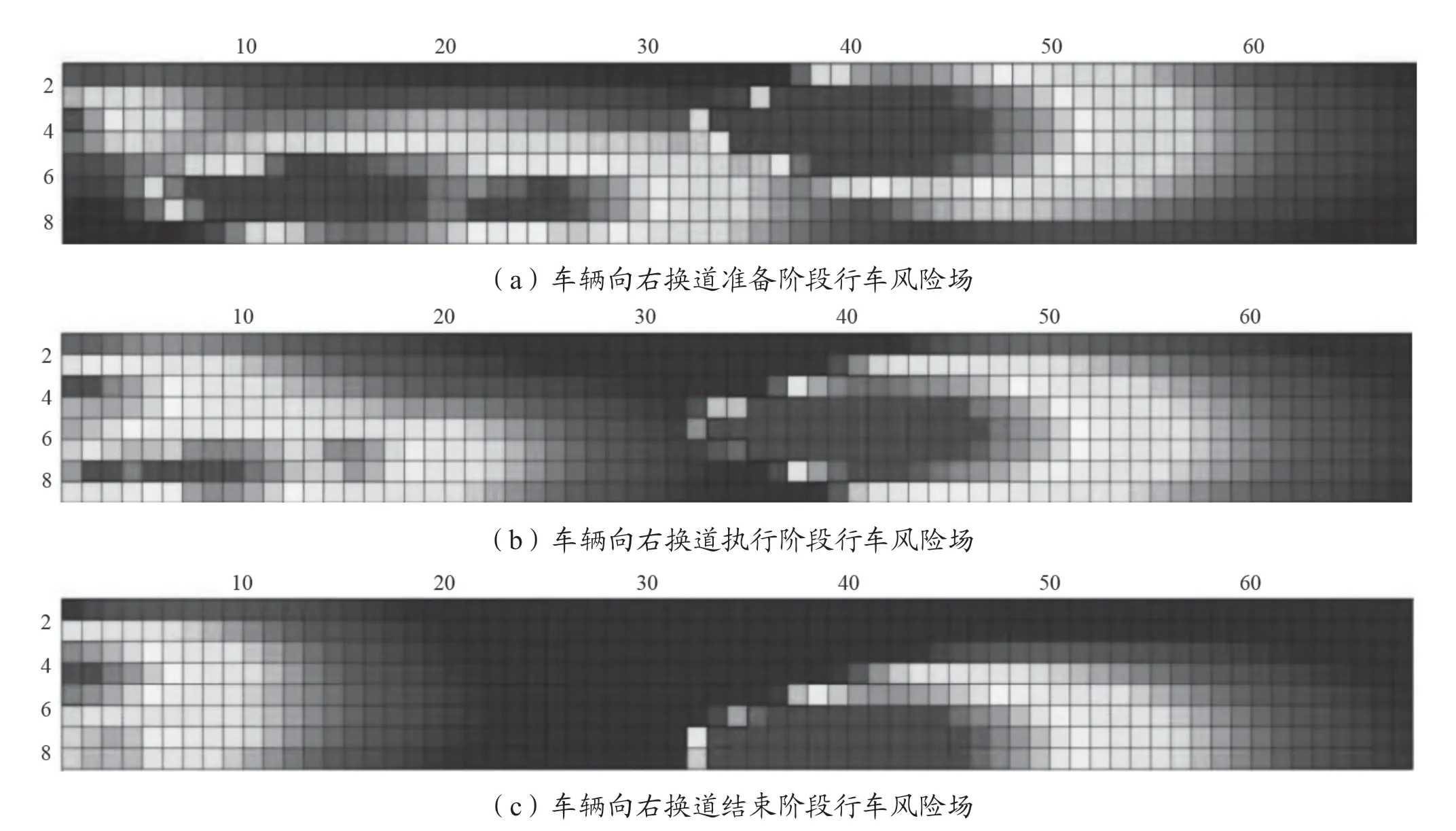
图6 车辆向右换道行车风险场
在实际的换道场景中,驾驶员一般会借助右换道完成超车行为,或具有其他进行换道的主观意愿,此时车辆由快车道驶入慢车道。准备阶段,驾驶人需要确认右方受超车辆的位置,确认自身与受超车辆在当前速度下右前方是否达到足够的换道安全距离;执行阶段,驾驶人已根据周围空间状况确认换道可行,进行右车道换入操作;结束阶段,两车间距完全拉开,车辆换道行为基本完成。
3.4 结论
结合以换道车辆为参考系的行车风险场强图,车辆如需执行换道行为,其触发条件为:在换道行为的准备阶段,与其关联性较高的附近区域须为低风险;若欲完成整个换道行为,还需满足其持续条件,即在换道的执行与结束阶段,在车辆前后两方的一定范围内能够生成并维持低风险状态。
根据换道行为的不同,触发条件的关联区域亦会有所区别。在左换道行为中,这一区域主要分布在车辆左侧起至其前方20~30 m处;在右换道行为中,其主要位于右前方5~20 m范围内。而在与持续条件相关联的空间内,车辆则需要留意其间可能出现的风险骤增现象,以决定是否变更或终止换道过程,如可能阻碍车辆的突然闯入等情况。
在现实环境中,低风险区域的形成包括如下三种场景:换道目标车道无阻碍车辆;换道目标车道有车,但位于前方且速度较大;换道目标车道有车,但位于后方且速度较小。尽管在场景特性上具有一定差异,但其均能保证换道车辆与附近阻碍车辆间留有足够安全的相对距离,因而在经风险场量化后都可得到较为统一的低风险场分布,而这也在一定程度上证明了风险场量化方式识别触发换道潜在条件与监测换道持续条件的准确性与简便性。
4 结语
文中综合将车辆换道的原始信息进行了转换,通过建立行车风险场,以换道车辆为中心,量化其周围风险场分布,分析车辆的具体换道行为。研究发现,车辆要安全完成换道行为,需要在执行前满足相应区域低风险的触发条件,也应在执行过程中满足相应的持续条件。这一研究结果可以作为驾驶人换道行为的执行及其过程中对周围车辆行驶状态变化的判别等方面的理论参考,一定程度上为道路行车安全领域的研究与实现提供有益借鉴。
猜你喜欢
——《势能》
文化纵横(2022年3期)2022-09-07
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
金桥(2022年4期)2022-05-05
中学生数理化·八年级物理人教版(2021年6期)2021-11-22
中学生数理化(高中版.高考理化)(2021年3期)2021-05-21
河北理科教学研究(2020年1期)2020-07-24
铁道通信信号(2019年6期)2019-10-08
中学生数理化·八年级物理人教版(2019年6期)2019-06-25
人大建设(2018年7期)2018-09-19
商周刊(2018年15期)2018-07-27
