基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器
2022-08-27 09:39修杨邓宏彬危怡然李东方
兵工学报 2022年8期
修杨, 邓宏彬, 危怡然, 李东方
(1.北京理工大学 机电学院, 北京 100081; 2.福州大学 电气工程与自动化学院, 福建 福州 350108)
0 引言
四旋翼无人机是一种非线性、多变量、强耦合的无人飞行器。这种飞行器具有灵活稳定的飞行能力和跟踪能力,在灾区救援、农业养殖和军事侦察等领域发挥着重要作用。由于四旋翼无人机的飞行控制离不开稳定的姿态角和运动位置,研究无人机的路径跟随方法是十分必要的。
由于四旋翼无人机的数学模型复杂性高、耦合性强,无人机稳定的路径跟随运动离不开优秀的控制算法。梁宵等考虑到四旋翼无人机的强耦合特点,提出了适用于各种结构的四旋翼无人机姿态的解算方法,并利用神经元网络算法分别控制PID的内环与外环,该方法降低了对无人机模型的依赖。针对四旋翼无人机模型的复杂性和飞行环境的未知性,Zhao等利用浸入与不变自适应控制方法补偿了无人机模型中的不确定参数,并通过无人机的样机实验验证了该方法的可行性。吕国强等使用系统辨识的方法得到了四旋翼无人机模型中的未知参数,实现了无人机的路径跟随控制和飞行避障控制。Chang等开发了一种具有避障功能的四旋翼无人机自抗扰控制系统,消除了系统内部和外部的扰动影响,实现了无人机稳定的路径跟随运动。聂博文等研究了四旋翼无人机的运动机理,使用反步控制方法实现了无人机的姿态控制,并制作无人机样机验证了算法的可行性。Yang等提出基于滑模变结构方法的模糊控制规则,有效地减少了抖振现象的产生。苏丙末等设计了基于多传感器信息融合的四旋翼无人机导航方法。针对复杂环境中的未知干扰,传感器的信息反馈可以有效地提高无人机飞行的稳定性与准确性。Ma等提出一种基于扩展状态观测器的四旋翼无人机预测控制方法,有效的提高了无人机系统的鲁棒性。王树刚简化了四旋翼无人机的非线性模型,得到了线性的动力学模型。并利用控制理论实现了四旋翼无人机稳定的飞行控制。Yu建立了一种允许存在不确定性的SO(3)模型,这种模型虽然提高了四旋翼无人机的自适应能力,但是较慢的调节速度会降低系统状态的收敛速度。Chen等利用径向基函数(RBF)神经网络方法对四旋翼无人机模型中的不确定环节进行了预测,并让预测值能够在线逼近真实值,提高了无人机状态的收敛速度。
虽然科研工作者们在四旋翼无人机的研究领域中做出了大量的贡献。但是仍存在许多需要解决和优化的问题,未知的外界环境干扰会导致旋翼的力矩输入无法满足无人机的路径跟随需求;陀螺效应与风场阻力对无人机路径跟随效果造成的负面影响会逐渐累加;四旋翼无人机飞行过程中的姿态和位置的跟踪性能不理想等问题。
为解决以上问题,本文提出一种基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器。这种控制器不仅考虑了未知外界因素对四旋翼无人机的姿态和位置的干扰,而且避免了陀螺效应与风场阻力对无人机路径跟随性能的影响。所提出的控制器很好地抑制了四旋翼无人机各状态变量在收敛过程中出现的超调现象,使得无人机的姿态角和运动位置能够快速收敛到期望值。首先,为使四旋翼无人机的数学模型逼近真实样机,考虑陀螺效应因子、风阻系数和旋翼执行器故障因子等外界干扰量对无人机运动的影响,建立了无人机的力学模型。其次,将四旋翼无人机的路径跟随运动目标划分为两个子目标,分别是姿态目标和运动位置目标。再次,为实现制定的目标,利用反步控制方法和滑模变结构控制方法,设计了四旋翼无人机系统状态变量的期望虚拟控制量和4个控制输入,控制输入中的抗干扰项可以抵消外界因素的未知影响。同时,使用估计值代替无人机模型中的陀螺效应因子与风阻系数,提高四旋翼无人机在运动过程中的抗干扰能力。然后,通过设计合适的Lyapunov函数,整个控制系统的渐进稳定性被证明。最后,通过仿真实验,比较四旋翼无人机在所提控制器与相关研究中控制器作用下的路径跟随性能曲线,验证所提出的控制器的有优越性,并利用样机实验验证控制器的有效性。
本文的贡献和创新点可以总结为以下3点:
1)所提控制器使用限幅函数代替滑模趋近律中的符号函数,抵消了无人机力学模型中的未知外界干扰项,抑制了无人机在路径跟随过程中的抖振现象,提高了系统的稳定性与鲁棒性。
2)所提控制器利用自适应控制方法对旋翼的陀螺效应因子与风阻系数进行估计,并用估计值代替旋翼控制输入方程中的真实值,以此来满足无人机路径跟随对控制输入的精度需求。这个过程中,估计值可以根据无人机的运动状态进行实时更新。
3)所提出的控制器提高了四旋翼无人机的路径跟随精度,验证了所提出的控制器能够消除状态变量收敛过程中的超调现象,使无人机的姿态与位置具有快速的收敛速度和优秀的跟踪稳定性。
1 四旋翼无人机的力学模型
为便于描述,将全局惯性坐标系定义为,无人机在中沿轴、轴和轴方向的受力分别为、和。定义无人机坐标系为,四旋翼无人机在中沿轴、轴和轴方向的受力分别为、和。四旋翼无人机的受力情况和坐标变换如图1所示。图1中,、、分别为四旋翼无人机绕轴、轴、轴旋转的角度,、、、为4个旋翼提供的升力。
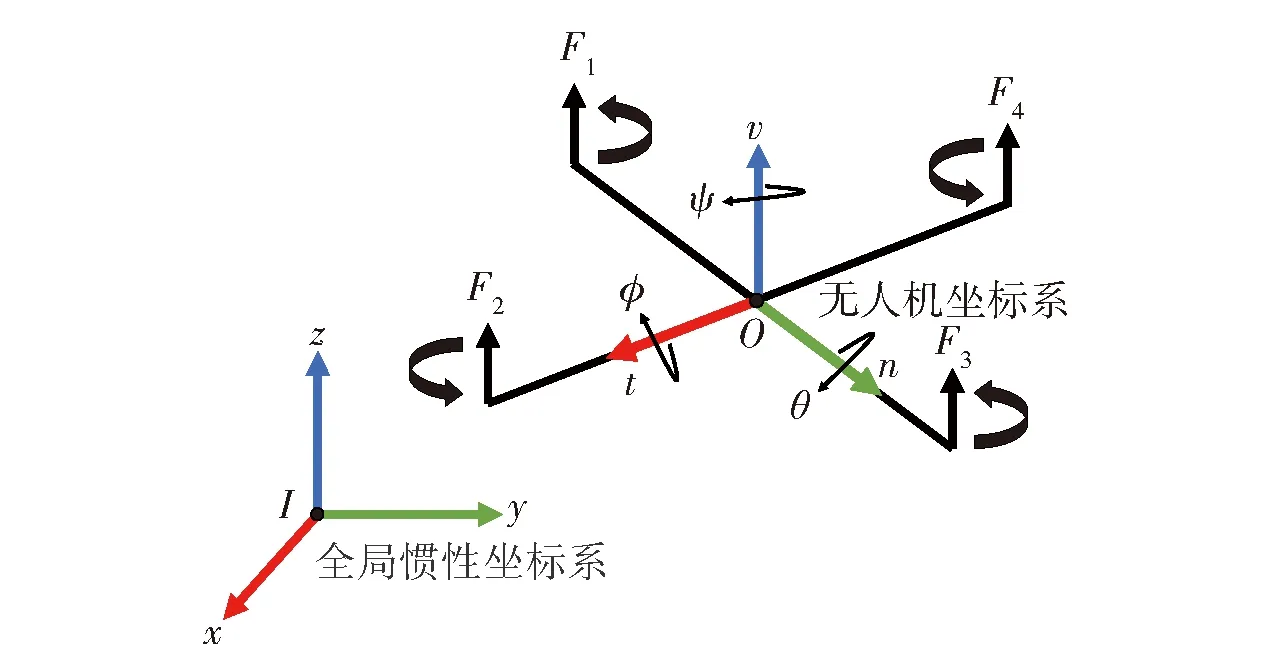
图1 四旋翼无人机的模型与坐标变换Fig.1 Model of a quadrotor UAV
四旋翼无人机绕轴旋转的角度为滚动角,从坐标系的轴旋转到坐标系轴的旋转矩阵为

(1)
四旋翼无人机绕轴旋转的角度为俯仰角,从坐标系轴旋转到坐标系轴的旋转矩阵为
(2)
四旋翼无人机绕轴旋转的角度为偏航角,从坐标系轴旋转到坐标系轴的旋转矩阵为
(3)
结合(1)式、(2)式和(3)式,得到从坐标系到坐标系的旋转矩阵为
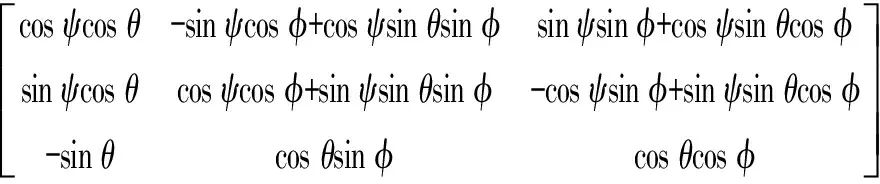
(4)


(5)

根据牛顿第二定律,四旋翼无人机的位移运动模型为

(6)
式中:为控制输入量,=+++;为无人机的质量;、和为空气阻力系数;、和为外界环境的未知干扰。
根据欧拉动力学方程,无人机的姿态角模型为
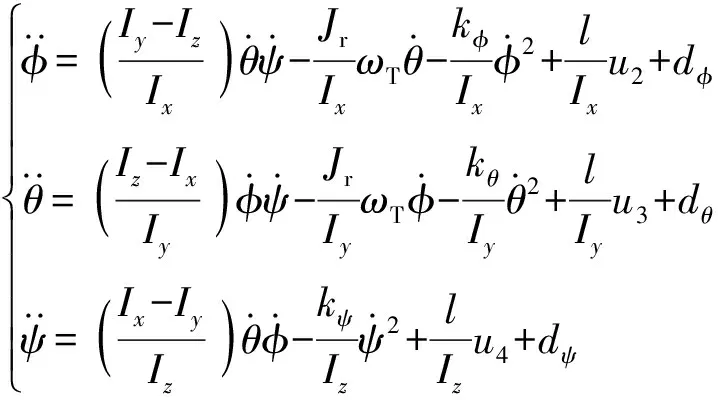
(7)

四旋翼无人机模型中的未知干扰量,,,,,满足||,||,||,||,||,||≤≤。其中,和(=1,2,…,6)是正的常数。
四旋翼无人机的滚动角、俯仰角和偏航角是有界的,并且满足-π2 rad<<π2 rad,-π2 rad<<π2 rad和-π rad<<π rad。
定义符号函数sgn()和限幅函数sat()的计算方法为

(8)

2 控制目标
为四旋翼无人机的自适应鲁棒路径跟随控制器制定目标。控制器的最终目标是四旋翼无人机的飞行轨迹快速收敛并跟踪设定的期望路径。同时,无人机的姿态角能够在收敛到期望值后保持稳定。为实现制定的目标,需要对目标进行分解,分别为无人机的姿态控制目标和运动位置控制目标。各目标的具体内容如下。
2.1 目标1——姿态目标
四旋翼无人机的姿态角包括滚动角、俯仰角和偏航角。姿态角的期望值分别为、和。姿态控制目标要求实际姿态角能够快速收敛到期望值并保持跟踪,实现姿态角误差=-、=-和=-收敛到0°并保持稳定:

(9)
2.2 目标2——运动位置目标
四旋翼无人机在坐标系中的实际位置坐标为、和,期望的位置坐标为、和。运动位置控制目标要求实际位置坐标能够快速收敛到期望值并保持跟踪,实现运动位置坐标误差=-、=-和=-收敛到0 m并保持稳定。

(10)
在四旋翼无人机的路径跟随控制中,姿态目标的实现可以保证无人机转向运动(滚动、俯仰、偏航)的快速性与准确性。位置目标的实现可以保证无人机的运动轨迹快速收敛到期望路径。由于四旋翼无人机的姿态控制与位置控制之间存在较强的耦合关系,无人机姿态的变化趋势和稳定性会直接影响位置的性能。同时,滚动角和俯仰角的期望值也是根据无人机的位置信息计算得到的。姿态目标和位置目标共同作用,才能实现完整的四旋翼无人机路径跟随运动。
3 自适应鲁棒控制器设计
根据第2节制定的控制目标,设计四旋翼无人机的自适应鲁棒路径跟随控制器,分为四旋翼无人机的姿态控制器和位置控制器,同时验证四旋翼无人机路径跟随控制系统的稳定性。为便于描述,四旋翼无人机的状态变量用(11)式中的符号表示,各状态变量的期望值用d(=1,2,…,11,12)来表示。

(11)
3.1 姿态控制器设计
结合(7)式和(11)式,姿态角模型的微分方程可以写成(12)式的形式:

(12)

无人机的滚动角误差、俯仰角误差和偏航角误差的表达式及其微分形式可以写为

(13)
设计Lyapunov候选函数、和为
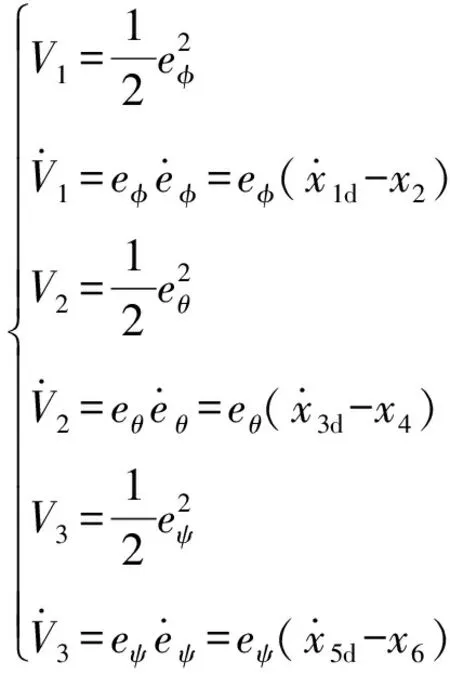
(14)
根据反步控制算法的思想设计四旋翼无人机姿态角速度的虚拟控制变量为

(15)
式中:、、为正的常数。
四旋翼无人机滚动角速度误差2、俯仰角速度误差2和偏航角速度误差2的表达式为
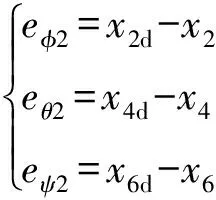
(16)
将(15)式和(16)式代入(14)式后,Lyapunov候选函数、和对时间的微分形式可以写为

(17)
设计四旋翼无人机的滚动角、俯仰角和偏航角的滑模面分别为

(18)
式中:、、为正的常数。
(19)
为使四旋翼无人机的姿态角收敛与渐进稳定,设计四旋翼无人机的控制输入、和分别为

(20)

(21)
式中:、、为正的常数。
四旋翼无人机姿态角控制输入(20)式和估计值更新律(21)式可以使无人机的滚动角、俯仰角和偏航角收敛到期望值并保持渐进稳定,即四旋翼无人机的姿态可以实现渐进稳定。
设计四旋翼无人机滚动角、俯仰角和偏航角的Lyapunov候选函数分别为

(22)
式中:
(23)

(24)

(25)
由于,,≥≥,,,满足-||-≤0,-||-≤0,-||-≤0。则Lyapunov函数≥0、≥0和≥0的微分为

(26)

3.2 位置控制器设计
结合四旋翼无人机位置的运动学模型(6)式和(11)式,位置变化的微分方程可以简化为

(27)
式中:、、分别为四旋翼无人机轴、轴、轴方向上的虚拟控制输入分量,=(sinsin+cossincos),=(sinsincos-cos·sin),=coscos。虚拟控制输入满足如下关系:
(28)
四旋翼无人机在坐标系的轴、轴、轴方向上的位置误差及其微分形式可以写为

(29)
设计Lyapunov候选函数、和为

(30)
根据反步控制方法设计无人机在坐标系中的虚拟运动速度分量为(31)式,即运动速度的虚拟期望值:

(31)
式中:、、为正的常数。
于是,在坐标系中,得到四旋翼无人机沿着轴、轴和轴方向的运动速度误差2、2和2分别为
2=-,2=-,2=-
(32)
设计四旋翼无人机运动位置的滑模面。将无人机力学模型代入滑模面后,可得

(33)
式中:、、为正的常数。
为使无人机的运动位置收敛与渐进稳定,设计(33)式中的虚拟控制输入、和为
(34)


(35)
(34)式中四旋翼无人机运动位置的虚拟控制输入和(35)式中的估计值更新律可以使无人机的、和收敛到期望值并保持渐进稳定,即四旋翼无人机的运动位置可以实现渐进稳定。
设计无人机在轴、轴和轴方向上运动位置误差的Lyapunov候选函数分别为、和:

(36)
式中:、、为正的常数。

(37)
(38)

(39)
由于,,≥≥,,,不等式-||-≤0,-||-≤0,-||-≤0是满足的。则Lyapunov函数≥0、≥0和≥0的微分满足:
(40)
四旋翼无人机的运动位置和偏航角的期望值是初始设定的,滚动角和俯仰角的期望值是利用虚拟控制输入、和反解得到的。
在虚拟控制输入和的两边分别乘以sin和cos,可得

(41)
在虚拟控制输入和的两边分别乘以 cos和sin,可得

(42)
根据(41)式和(42)式可以计算四旋翼无人机的期望滚动角与期望俯仰角,即

(43)
根据期望值和无人机的初始状态,利用反步控制方法可以得到无人机的位置与姿态的虚拟控制量,即虚拟期望速度。滑模控制方法可以依据系统的状态误差来制定相应的滑模面与趋近律,使得无人机状态变量能够快速收敛到滑模面,同时保证系统的稳定性。反步滑模方法设计的无人机虚拟位置控制输入经过解算后得到实际控制量,与姿态角的控制输入量共同调整四旋翼无人机的路径跟随运动。同时,将虚拟位置控制输入反馈到解算器,经过反解后,可以得到无人机的滚动角与俯仰角的期望值。在这个过程中,传感器采集系统的状态变量信息,状态变量信息经过自适应控制器后转化为未知环境参数的估计值,无人机的姿态与位置控制器利用估计值来完成对无人机状态的校正。四旋翼无人机路径跟随控制流程如图2所示。
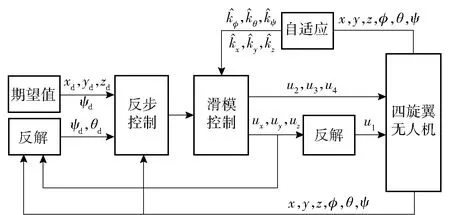
图2 四旋翼无人机的控制流程Fig.2 Control flow of a quadrotor UAV
4 仿真实验
为验证本文所提出的控制器的有效性和优越性,进行仿真对比实验。在对比实验中,基于传统反步反馈控制方法的四旋翼无人机路径跟随控制器定义为TBC,基于传统滑模自适应控制方法的四旋翼无人机路径跟随控制器定义为TSC,基于PID的四旋翼无人机路径跟随控制器定义为PID,本文所提出的控制器定义为PC。


表1 参数设置
四旋翼无人机的三维运动轨迹如图3所示。三维运动轨迹分解后可以得到四旋翼无人机的轴坐标、轴坐标和轴坐标,分别如图4、图5和图6所示。从图4、图5 和图6中可以看出,PC和TSC控制下的无人机轨迹收敛速度快,TBC控制下的无人机轨迹收敛速度慢,PID控制下的无人机轨迹超调明显。但是在TSC控制下,收敛后的无人机轴坐标和轴坐标会在路径峰值处偏离参考轨迹0.2 m。TBC控制下的无人机轴坐标具有良好的跟踪能力,但是轴坐标在曲率较大处无法与期望值重合,并且轴坐标的误差会随着时间增加。PID控制下的无人机坐标分量会出现明显的波动,在转弯处的跟踪效果不够理想。与之相比,在PC控制下,无人飞行机轨迹的轴、轴、轴坐标分量均能够快速地收敛到参考值,并且保持轨迹与路径的重合,具有理想的收敛速度和稳定性。
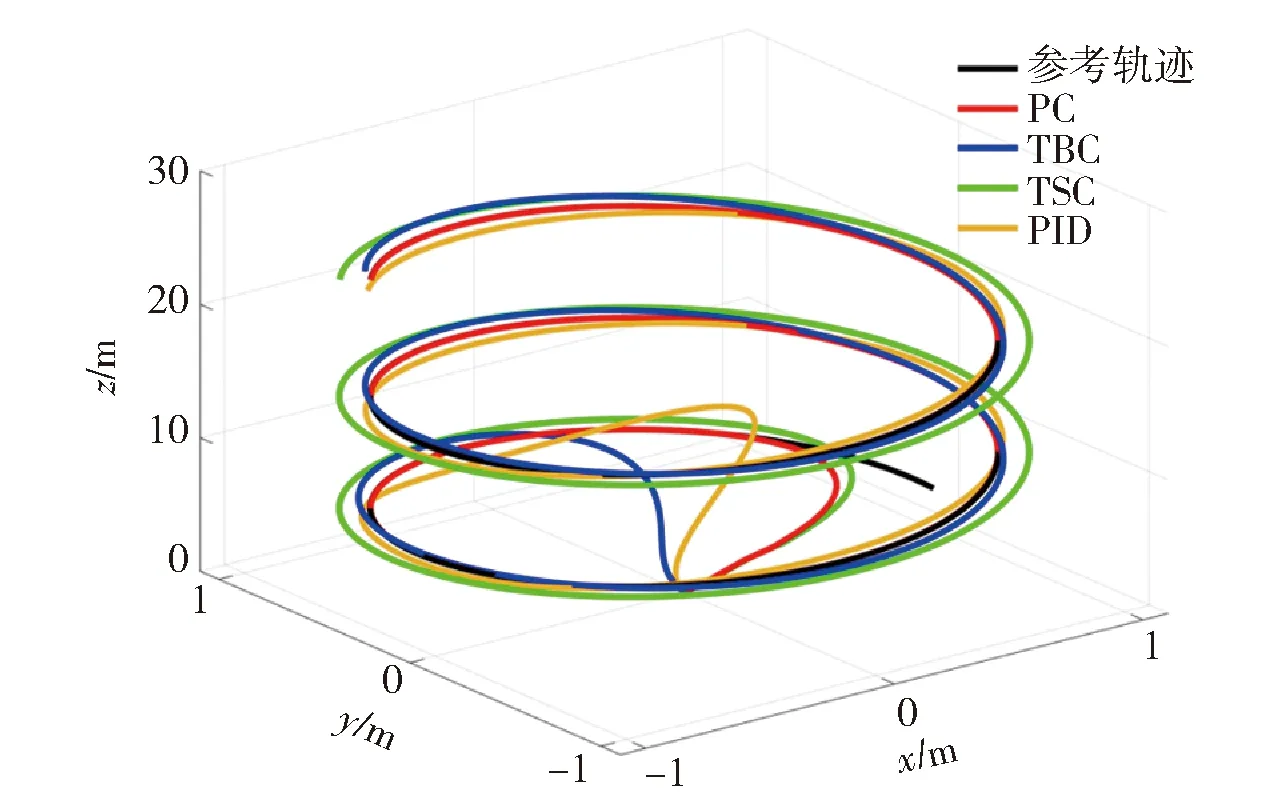
图3 四旋翼无人机的三维运动轨迹Fig.3 3D motion trajectory of the quadrotor UAV

图4 四旋翼无人机的x轴坐标Fig.4 x-coordinate of the quadrotor UAV

图5 四旋翼无人机的y轴坐标Fig.5 y-coordinate of the quadrotor UAV
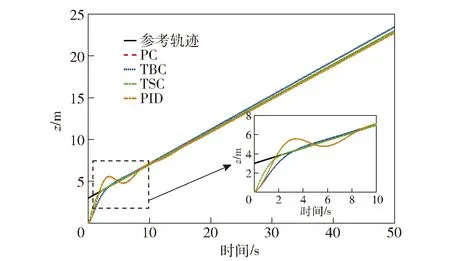
图6 四旋翼无人机的z轴坐标Fig.6 z-coordinate of the quadrotor UAV
四旋翼无人机在本文所提出PC控制下的位置误差如图7所示,可见在PC的控制下,无人机的轴、轴、轴坐标误差在4 s内快速收敛到0 m,收敛后的误差曲线平滑稳定,没有出现明显波动。

图7 四旋翼无人机的位置误差(PC)Fig.7 Position error (PC) of the quadrotor UAV
四旋翼无人机的滚动角、俯仰角和偏航角如图8、图9和图10所示。由图8、图9、图10可见,由于滚动角和俯仰角的参考值是反解无人机姿态角得到的,参考值在10 s后才趋于稳定的周期变化;PC、TBC、TSC和PID控制下的无人机滚动角分别在1 s、22 s、7 s和23 s时收敛到参考值,俯仰角分别在1 s、20 s、6 s和11 s时收敛到参考值,偏航角分别在2 s、11 s、5 s和4 s时收敛到参考值;3种控制器作用下的姿态角在收敛后都能够跟随参考值,其中PC的控制能力最强,具有最快的姿态角收敛速度,为无人机的位置收敛起到了很大帮助。

图8 四旋翼无人机的滚动角Fig.8 Roll angle of the quadrotor UAV
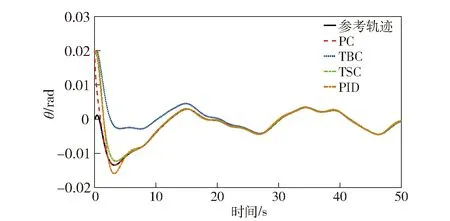
图9 四旋翼无人机的俯仰角Fig.9 Pitch angle of the quadrotor UAV

图10 四旋翼无人机的偏航角Fig.10 Yaw angle of the quadrotor UAV
四旋翼无人机在所提出控制器作用下的姿态角误差如图11所示。在PC作用下,滚动角误差和俯仰角误差在1 s处收敛到0 rad,收敛后的误差曲线平滑且稳定,即滚动角和俯仰角完美跟踪参考值。偏航角误差在2 s处收敛到0 rad,在±0.01 rad幅值内周期变化,误差率仅为1%,满足了无人机路径跟随精度。
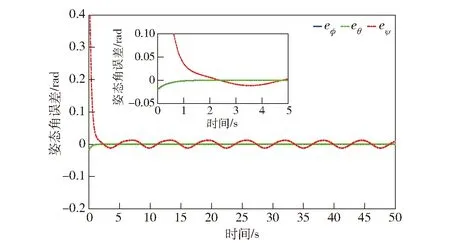
图11 四旋翼无人机的姿态角误差(PC)Fig.11 Attitude angle error (PC) of the quadrotor UAV
四旋翼无人机模型中陀螺效应因子和风阻系数的估计值如图12、图13所示。从图12、图13中可以看出,各参数估计值在2 s内收敛到固定数值并保持稳定,控制器利用这些估计值补偿无人机的旋翼力矩输入,保证在未知环境中无人机路径跟随运动的稳定性。
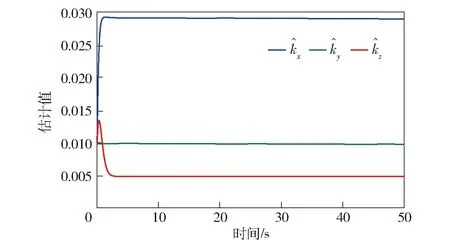
图12 位置参数估计值Fig.12 Estimated value of the position
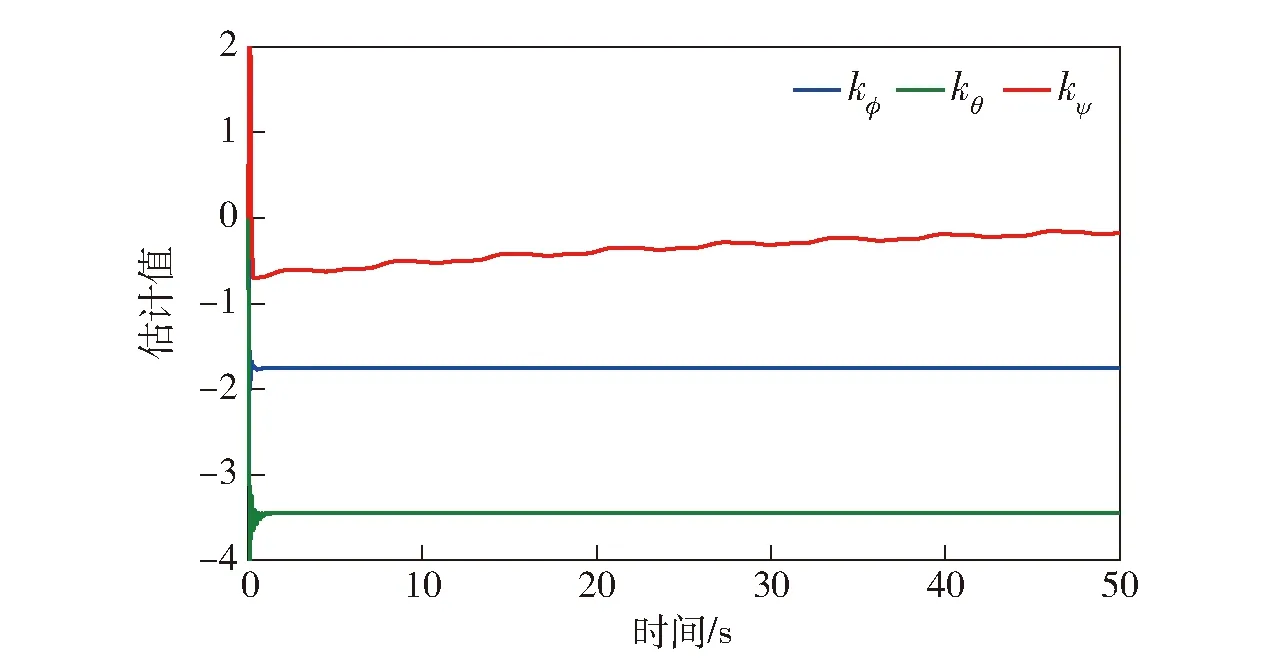
图13 角度参数估计值Fig.13 Estimated value of the angle
四旋翼无人机的控制输入如图14和图15所示。无人机的位置控制输入在3 s内快速趋于稳定,为无人机的垂直起降和位置跟随提供升力。无人机的姿态控制输入、、在前4 s内大幅度高频率变化,快速调整无人机的姿态角收敛到参考值。之后,、、收敛为稳定的周期波动,与姿态角的变化趋势保持一致。

图14 控制输入u1Fig.14 Control input u1
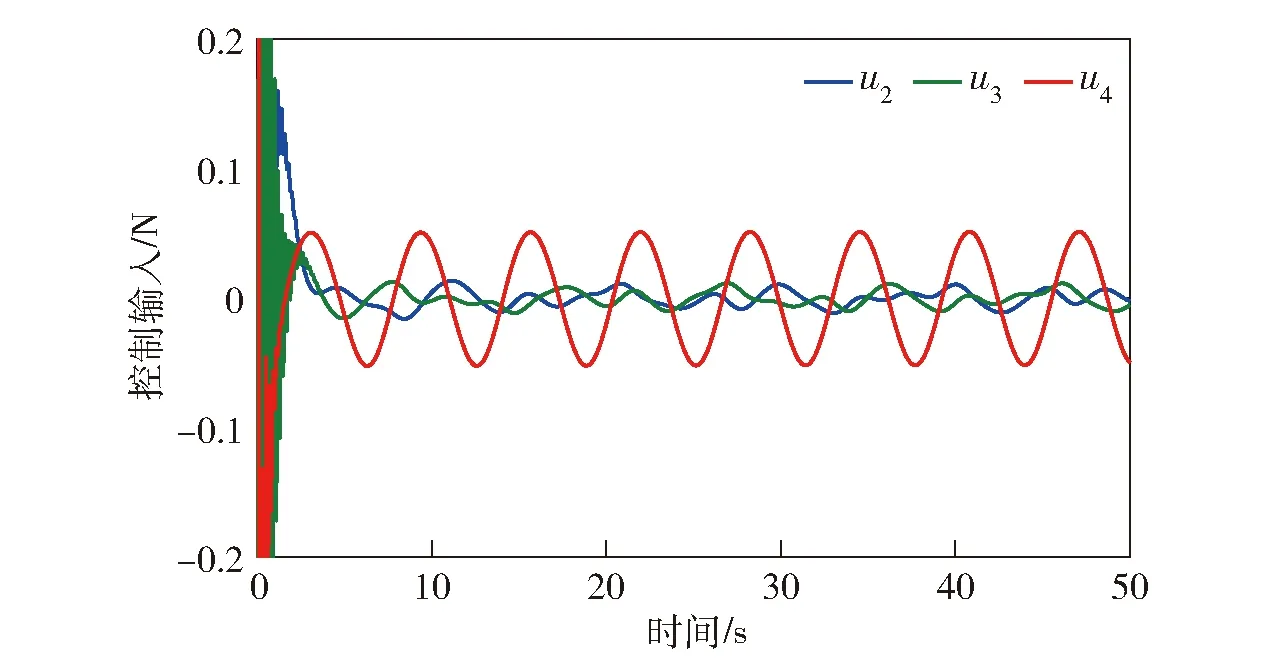
图15 控制输入u2、u3、u4Fig.15 Control inputs u2, u3, u4
从以上仿真对比实验可以看出,与TSC、TBC和PID相比,本文所提出方法中的陀螺效应因子估计值和风场阻力系数估计值能够自适应补偿系统的控制输入,提高四旋翼无人机路径跟随的鲁棒性;本文方法控制无人机的运动位置、姿态角度、误差变量和参数估计值实现收敛并保持稳定。四旋翼无人机在不同控制器作用下的性能定量对比如表2所示。这一结果表明本文所提出的四旋翼无人机自适应鲁棒路径跟随控制器具有清晰的可行性与突出的优越性。

表2 控制器性能对比
5 样机实验
为验证本文所提出的控制器的实际可行性,进行样机实验。所使用的四旋翼无人机如图16所示。无人机采用三桨叶的碳纤维旋翼,无刷直流电机驱动旋翼的转动。机架的中心为主控制器,控制器的上下分别安装GPS和电池。设置无人机跟踪的期望路径为一个高度为5 m、半径为3 m的圆形路径,跟踪数据与实际的跟踪效果如图17和图18所示。

图16 四旋翼无人机结构Fig.16 Structure of the UAV
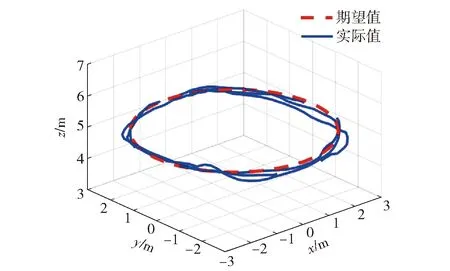
图17 四旋翼无人机的跟踪数据Fig.17 Following performance of the UAV

图18 四旋翼无人机飞行实验Fig.18 Flight experiment
从图18中可以看出,四旋翼无人机的飞行轨迹整体上与期望路径一致,表明本文所提控制器能够实现四旋翼无人机的路径跟踪任务。样机飞行实验体现了所提出的控制器的实际可行性。
6 结论
本文提出一种基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器,建立具有未知环境参数和外界干扰的四旋翼无人机力学模型,提出无人机路径跟随的姿态控制目标和位置控制目标。根据反步滑模方法,设计了速度状态变量的虚拟期望值和防抖振的旋翼控制输入,抵消了外界干扰的影响。未知环境参数的估计值利用自适应更新律实现了对控制输入的补偿,提高了无人机系统的鲁棒性。通过仿真对比和实验可以得出结论:
1)所提出的控制器实现了对未知参数的实时估计,保证了无人机系统的抗干扰能力。
2)所提出的控制器使无人机姿态和位置具有更快的收敛速度,并且收敛后的状态变量平滑无波动,表现出了优秀的渐进稳定性。
猜你喜欢
航空学报(2022年7期)2022-09-05
导航定位学报(2022年2期)2022-04-11
直升机技术(2021年2期)2021-06-17
语数外学习·高中版中旬(2021年11期)2021-02-14
科技创新与应用(2020年10期)2020-04-24
考试周刊(2018年15期)2018-01-21
航空模型(2017年3期)2017-07-28
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
课程教育研究·学法教法研究(2016年19期)2016-09-07
中学课程辅导·教师教育(中)(2016年6期)2016-07-02