
基于焦面哈特曼波前传感器的大视场高精度波前测量技术论证*
2022-08-27 12:20杨俊彦史庆杰李成平谭晓宁杨奇龙
飞控与探测 2022年3期
刘 爽,杨俊彦,史庆杰,李成平,谭晓宁,杨奇龙,,曹 代
(1.电子科技大学 光电科学与工程学院·成都·611731;2.上海航天控制技术研究所·上海·201109;3.中国矿业大学(北京) 理学院·北京·100083;4.重庆连芯光电技术研究院有限公司·重庆·400021;5.电子科技大学 电子信息与通信工程学院·成都·611731)
0 引 言
气动光学效应对导引头目标成像跟踪系统的性能有着十分重要的影响,它可能引发探测器接收的图像产生偏移、抖动和模糊等问题。例如,当导弹在大气层内高速飞行时,其光学头罩与大气之间产生剧烈的相互作用,由于气动力、气动热等原因使头罩周围的气体密度发生剧烈变化,导致在光束的传输通道上产生严重的折射率非均匀分布,引起严重的测量误差。对气动光学效应引起的波前误差进行测量,是导引头目标成像跟踪系统中目标成像清晰化的关键技术,其中波前误差大视场测量已成为研究的热点。
传统的夏克-哈特曼波前传感器广泛应用于波前探测,但是其视场小,仅能对接近零度视场内的目标进行波前检测,无法对模糊图像的所有区域进行修复,因此无法用于导引头目标成像跟踪系统。如图1所示,由于焦面哈特曼波前传感器具有独特的结构,因此在满足导引头对波前误差大视场测量的需求方面具有明显优势。利用焦面哈特曼波前传感器中光电探测器探测到的光斑阵列图像记录空间信息,微透镜阵列记录相位信息,即不同视场或角度的入射光波通过其特殊的光场结构,一次便能测得多个视场的波前信息,从而达到大视场的效果。

图1 焦面哈特曼波前传感器结构Fig.1 The architecture of focal plane Hartmann wavefront sensor
针对传统波前传感器难以满足高速飞行器气动光学效应测量中对大视场的需求,本文开展了焦面哈特曼波前传感器的研究,分析了焦面哈特曼波前传感器实现大视场、高精度波前测量的原理,并通过仿真实现在7阶像差和组合像差下的波前复原,最后搭建实验平台验证焦面哈特曼在3阶像差下的大视场、高精度的波前复原能力。
1 焦面哈特曼波前传感器大视场和高精度波前复原原理
焦面哈特曼波前传感器和传统哈特曼波前传感器的结构区别在于其微透镜阵列放置在入瞳透镜的焦面上,电荷耦合器件(Charge Coupled Device,CCD)探测器放置于微透镜阵列的焦面上。其中微透镜阵列可对入射波前进行分割,并在CCD探测器位置处实现低分辨率成像,从而形成光斑阵列。
1.1 大视场测量原理
由于焦面哈特曼波前传感器的特殊结构,当入射平行光照亮入瞳透镜焦面处的微透镜阵列时,可认为每个微透镜及其对应的CCD像素点为一个小型探测器,该像素点所成像称为子图像,而每个子图像即为处于不同视场的探测器对目标的成像。如图2所示,传统哈特曼波前传感器测量单个子孔径时需要64个像素,但焦面哈特曼波前传感器只需要16个像素,因此微透镜阵列能够轻易划分多个视场,同时在保证入瞳透镜的F数和微透镜的F数相等时,每个微透镜所成像就不会发生混叠。不过由于单个子孔径的成像像素数目(微透镜数目)减少,其波前复原探测精度也会降低,因此,与传统模式法复原波前不同,本文提出了一种基于Gerchberg-Saxton迭代算法(以下简称GS迭代算法)的波前复原优化算法。

图2 视场的划分Fig.2 Division of the field of view
1.2 基于GS迭代算法的高精度波前复原原理
基于GS迭代算法的波前复原优化算法在进行波前复原时仍然采用模式法,但与传统模式法相比,该算法主要有以下几步操作:1)远场光斑获取;2)模式法波前复原;3)GS迭代算法优化。
(1)远场光斑获取
获取远场光斑可理解为对焦面哈特曼成像过程的解释。以入瞳透镜中心为原点,(,)为入瞳透镜所在平面的坐标,可设定(,)为入瞳透镜上光的复振幅,(,)为入瞳透镜上振幅的幅度,(,)为入瞳透镜上的波前相位。以CCD探测器中心为原点,(,)为CCD探测器上的像素坐标,则CCD探测器上的复振幅为(,)。微透镜对应的像素为(,),其中微透镜阵列按照×排列,(,)为微透镜处于阵列中的位置。
CCD探测器上的复振幅(,)与(,)互为傅里叶变换,且本文中关心的是(,)的振幅变化,所以有如下公式
(,)=(,)ei(,)
(1)
(,)=I[(,)]{,}
(2)

(3)
其中,I和I为傅里叶变换和逆变换的简写;(,)为第(,)个微透镜对应的第(,)远场光斑;(,)为
(,)=

(4)
其中,表示微透镜的直径。
(2) 模式法波前复原
得到远场光斑后,可以利用式(5)和式(6)估计其波前相位斜率

(5)
(6)
其中,和表示在(,)两个方向上的偏移量。在得到波前斜率后,可以通过模式法进行波前复原。泽尼克多项式的通常表达为

(7)
其中,(,)为复原波前;为复原后的第阶泽尼克多项式系数;(,)表示泽尼克多项式,复原后的泽尼克多项式系数矩阵由斜率估计矩阵和复原矩阵求解得到。
(3) GS迭代算法优化
GS迭代算法的主要思想是在期望值限制的条件下,利用傅里叶变换将信号在时域和频域中反复变换,从而生成接近期望信号的结果,其特点在于由给定信号的幅度和其傅里叶变换信号的幅度来决定该信号的相位。图3表示其算法结构,在图3中频域限制是用给定的傅里叶变换幅度代替离散傅里叶变换(Discrete Fourier Transform,DFT)计算的傅里叶变换幅度,而时域限制是用给定的信号样本代替离散傅里叶反变换(Inverse Discrete FourierTransform,IDFT)计算的信号样本。经验表明,算法收敛相当快。值得注意的是,为了保证计算傅里叶变换幅度时不发生混叠效应,傅里叶变换尺寸可以取为信号实际长度的2倍。

图3 GS 算法框图Fig.3 Gerchberg-Saxton algorithm
经验表明,利用傅里叶变换的迭代算法虽然没有稳定的收敛性质,但常常能提供一个较接近的解,这类算法要求的计算量很低而受到很多使用者的欢迎。
利用GS迭代算法优化复原波前时初始点的选取也尤为重要,本文选取经过传统模式法复原后的波前作为初始点进行优化,同时将初始平面波也作为初始点进行比较,第2节主要介绍其仿真结果。
2 波前复原仿真
在进行仿真实验前,首先设置实验重要参数:入射光波波长=650nm,入瞳透镜直径=195mm,焦距=60mm,微透镜直径=013mm,焦距=4mm,微透镜阵列数为32×32。在仿真实验中的复原算法采用基于GS迭代算法的波前复原优化算法,其主要步骤及流程图如图4所示。
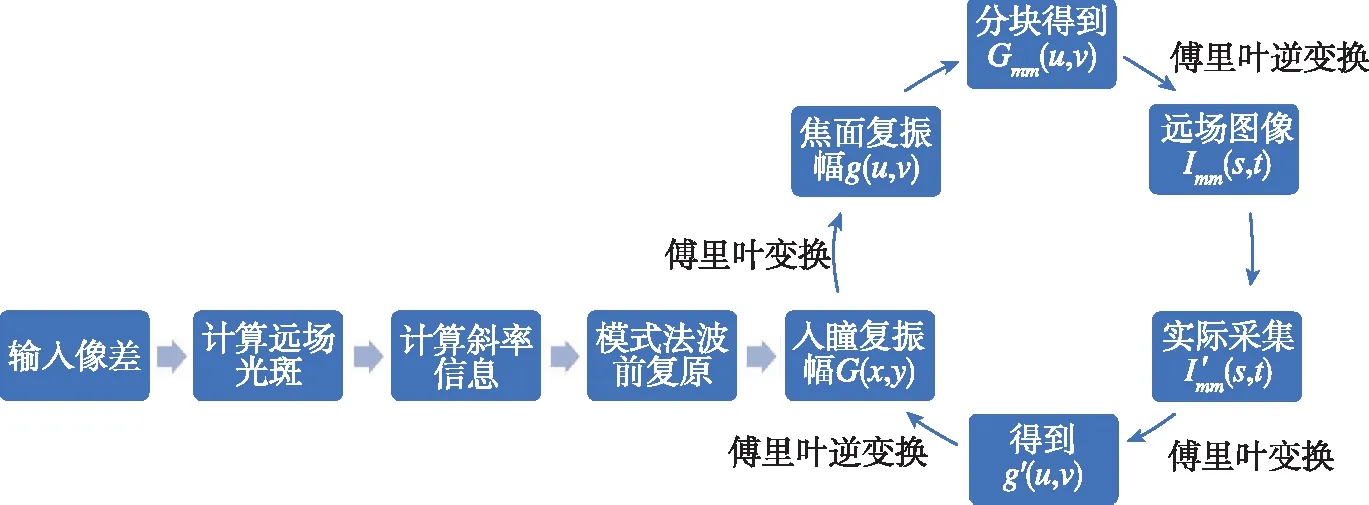
图4 波前复原优化算法Fig.4 Wavefront recovery optimization algorithm
1)输入已知波前像差;
2)计算远场光斑;
3)计算远场光斑斜率信息;
4)使用模式法进行波前复原,并代入GS迭代中;
5)得到入瞳处的复振幅的估计(,),再对其作傅里叶变换得到焦面上的复振幅(,);
6)对焦面上的复振幅(,)进行分块得到(,);
7)对分块后的(,)分别作逆傅里叶变换,得到每块微透镜对应的远场图像(,);
8)用实际CCD采集到的远场光斑强度数值的算术平方根代替(,)的模值,相位不变,分别得到′(,);
9)分别对′(,)作傅里叶变换,取中间微透镜大小的像素块,得到′(,),并将其合并得到′(,);
10)对′(,)作傅里叶逆变换,得到下一次迭代的入瞳复振幅′(,),重复直到一定次数或一定复原精度。
然后,选取7阶模式波前相位和组合像差波前相位作为输入波前,其像差图如图5所示。再分别利用模式法、初始点基于平面波的GS迭代法和初始点基于模式法复原后的波面的GS迭代法进行仿真,得到新的复原波前。
(a) 7阶像差

(b) 组合像差图5 输入像差Fig.5 Input of aberration
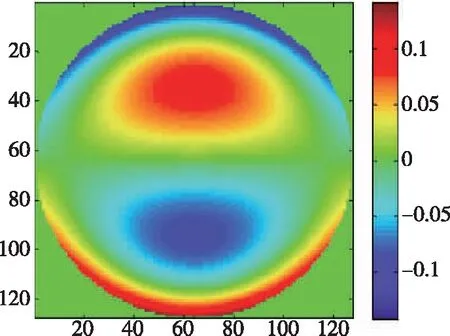
利用传统的模式法复原得到的波前复原精度为12%;选取平面波为初始点进行GS迭代,在迭代200次后,残差的相对RMS值就稳定在20%左右;选取模式法复原后的波前作为初始点,利用GS算法迭代200次后得到的复原波前分布如图6所示,此时的复原精度为5%。

(a) 7阶像差复原波前

(b) 组合像差复原波前图6 起始点为模式法复原波前的GS迭代效果图Fig.6 GS iterative rendering of the wavefront restored by the model method as the starting point
表1所示为波前复原精度对比。显然,模式法本身的复原精度要高于以平面波为起始点的GS迭代算法,但如果输入模式法复原后的波前,则GS迭代算法可以进一步优化复原结果。
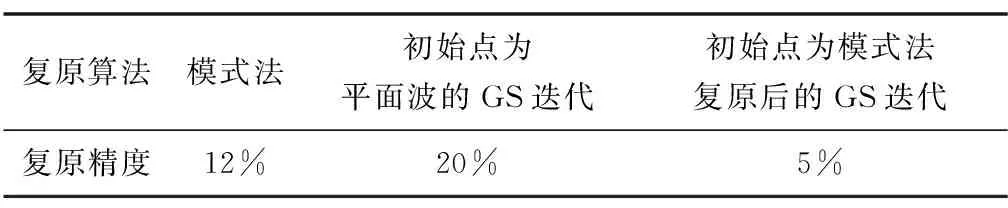
表1 波前复原精度对比Tab.1 Wavefront recovery accuracy comparison
3 实验论证
经过仿真实验得出初始点为模式法复原后的波前的GS迭代算法的复原效果最优,因此本文再进行实验论证其结果。本次实验采用的入瞳透镜直径为60mm,同时使用通光口为1.95mm的遮光罩设定入瞳透镜的直径;微透镜阵列的阵列数为32×32,单个微透镜直径为0.13mm,焦距为4mm,总尺寸为4.16mm×4.16mm。相机选用的是瑞士产的低噪声且像素数为1696×1708的Optronis CP80-3-M相机,像元大小为8μm,主镜选用的是腾龙(Tamron)A010变焦镜头,可调节焦距在28~300mm。根据焦面哈特曼波前传感器原理,微透镜放置于入瞳透镜焦面,CCD探测器放置于微透镜焦面。整个实验环境如图7所示。

图7 实验环境Fig.7 The lab environment
经过上述参数设置、公式计算及实际测试,此系统能够满足的指标如表2所示。

表2 系统指标Tab.2 System metrics
实验前对系统的复原能力进行测试,在标定了哈特曼波前传感器后,首先对无像差的远场光斑进行基于泽尼克多项式的拟合,得到泽尼克系数。输入光斑和拟合结果如图8所示。得到的泽尼克系数都在10的量级上,并且分布都比较随机,这应该是相机噪声导致的。

(a) 输入光斑

(b) 拟合系数图8 无像差光斑复原Fig.8 Aberration-free spot recovery
在初步验证了波前还原能力后,进行大视场波前还原实验的搭建,基于实验室现有条件的实验步骤为:
1)搭建5个激光器,使其照射在一张A4白纸上以发生漫反射,充当5个不同方向的点光源,如图9所示。

图9 不同方向的点光源Fig.9 Point lights in different directions
2)固定住光场相机波前传感器位置进行无像差采集工作,采集完成后在光路中加入100°的近视镜片以产生离焦像差,进行有像差采集工作。
3)为得到更好的图像还原质量,需要保证光场相机波前传感器与成像用相机的入射瞳面一致。拆下相机里的微透镜阵列,保持镜头焦距不变,调整对焦距离直至成像清晰。采集无近视镜片和有近视镜片的成像。
100°近视镜片相当于0.72个波长的球像差,即第三阶泽尼克离焦像差。利用焦面哈特曼波前传感器采集的远场光斑进行波前还原,提取出由中心视场的远场光斑图处理得到泽尼克模式系数(如图10所示)和复原波面及残差相位分布(如图11所示)。
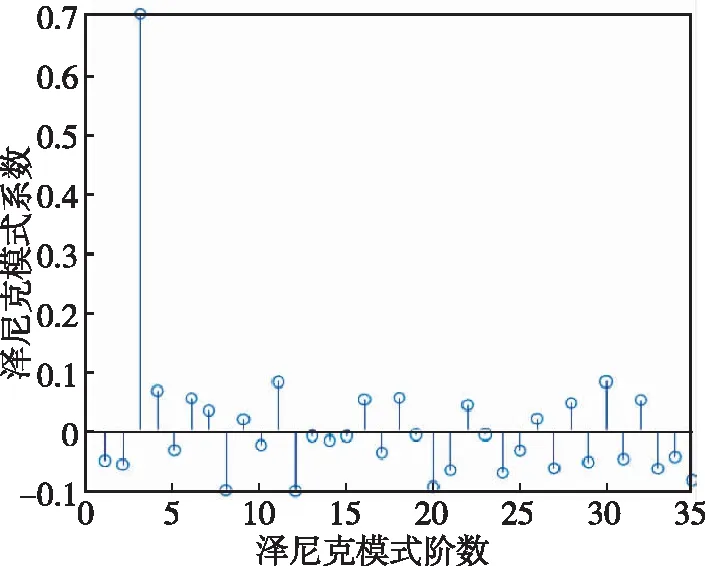
图10 泽尼克模式系数Fig.10 Zernike mode coefficients

(a) 复原波前

(b) 残差分布图图11 复原波面及残差相位分布图Fig.11 Restoration wavefront and residual phase distribution
经过基于模式法为初始点的GS算法复原后,其复原精度为5.5%,复原效果较好。最后对5个远场光斑进行处理得到波前畸变信息,并与对应的模糊图像区域进行反卷积处理得到清晰图像,处理结果如图12所示。

(a) 无像差图像

(b) 离焦像差图像

(c) 焦面哈特曼波前传感器采集图

(d) 像清晰化后的结果
由于实验过程中光源的方向是手动调整的,所以不能将光斑调至最边缘位置,实际的视场角是小于理论最大视场角的。图12中,无像差图像(a)和图像清晰化(d)均方根误差RMSE=0.028,原始图像(c)和模糊图像(b)均方根误差RMSE=0.088。
4 结 论
本文介绍了一种为实现气动光学效应中的大视场光学校正而设计的焦面哈特曼波前传感器。由于其特殊的结构设计,哈特曼波前传感器能够满足大视场的波前测量需求,同时使用基于GS迭代算法的优化复原算法能够实现高精度的波前复原。本文通过仿真软件实现了在7阶像差和组合像差下的大视场、高精度的波前复原,并得出基于模式法复原后的波前作为初始点的GS迭代算法能够实现5%的复原精度。最后搭建了实验装置,对焦面哈特曼波前传感器的大视场复原能力进行验证。结果表明,焦面哈特曼波前传感器能够达到3.97°的大视场检测,同时对3阶离焦像差进行高精度复原发现,清晰化后的图像与无像差图像的均方根误差低至0.028,实现了图像清晰化的目标。
本文发现输入像差时产生的远场光斑对噪声信号和环境条件敏感,因此,接下来将进一步改善实验环境,以减少系统误差的影响;同时,本实验只针对点目标进行波前复原,后续将利用焦面哈特曼波前传感器对扩展目标进行复原。
猜你喜欢
文萃报·周二版(2022年19期)2022-05-13
江苏科技报·E教中国(2022年5期)2022-05-11
小天使·二年级语数英综合(2021年4期)2021-06-15
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
文萃报·周二版(2018年46期)2018-07-13
科技知识动漫(2017年11期)2018-03-07
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
