
弹载微小型化三轴一体光纤陀螺组合设计*
2022-08-27 12:21李家韡刘德文陈华江姜海洋
飞控与探测 2022年3期
李家韡,刘德文,陈华江,2,朱 一,2,姜海洋,叶 童
(1.上海航天控制技术研究所·上海·201109;2.上海新跃联汇电子科技有限公司·上海·200233)
0 引 言
光纤陀螺由于具有精度高、寿命长、可靠性高、动态范围宽、全固态等特点,已经成为当今惯性仪表的发展方向。光纤陀螺基于自身的优势,可以广泛应用于运载火箭、航天卫星、战术及战略武器装备等军用领域,以及航空、航海、无人机、机器人、隧道挖掘、矿井开采、油井探测、地面车辆导航等民用领域。光纤陀螺应用领域的不同会带来应用环境的个性化差异,三轴一体光纤陀螺组合在兼顾传统光纤陀螺优点的同时,可进一步降低功耗、减小质量及体积,已成为新一代战术导弹姿态控制及惯性导航的重要角速度传感器。
现有报道的三轴一体光纤陀螺由于在设计过程中仅考虑单机产品的小体积及小质量设计,忽略了环境适应性设计和与其余敏感元件及功能模块的接口适配问题。国内现有三轴一体光纤陀螺产品均采用陀螺密集型设计,无法实现局部减振。由于陀螺内部结构密集,热传导能力差,致使陀螺在温度变化下零位偏置变化较大。此外,现有产品在设计上仅考虑陀螺单机的小型化要求,未考虑陀螺与加速度计、弹上接口电路及探测制导等模块的机械安装和数据通信的适配性。这些问题导致现有产品在应用于战术武器型号时,无法真正发挥三轴一体陀螺组合小体积、小质量设计优势,进而造成飞行控制系统无法有效集成光电探测、惯性导航及姿态控制。
本文通过三轴一体光纤陀螺组合进行集成化设计,实现了陀螺的小型化要求,在采用模块化设计的基础上,优化了产品内部热传导能力,并通过增加橡胶减振器实现了敏感模块的减振设计,提高了产品的环境适应性。在接口设计上,通过优化与总体设计接口的适配性,与飞行控制系统集成实现了光电探测、惯性导航及姿态控制等功能。
1 弹载三轴一体光纤陀螺组合详细设计
1.1 三轴一体光纤陀螺组合工作原理
三轴一体光纤陀螺组合由1个陀螺光源模块及3个陀螺敏感模块共同构成。陀螺光源模块由超辐射发光光源、一分三光纤耦合器及光源驱动电路组成,同时为三路陀螺敏感组件模块提供光波信号。陀螺敏感组件模块由一分二光纤耦合器、Y波导集成光学相位调制器、脱骨架光纤环、光电探测器及陀螺控制电路组成。三轴陀螺敏感组件正交安装,用于测量三正交轴向角速率输入,每个陀螺敏感组件由独立的闭环检测电路进行控制,闭环检测电路负责光干涉信号的采集、处理、解调和传输。闭环检测电路主要包括闭环信号检测及控制、数字接口输出等环节。其中闭环信号检测电路由前放滤波电路、AD转换电路、现场可编程门阵列(Field Programmable Gate Array,FPGA)处理电路、DA转换电路、调制器驱动电路及数字量接口通信电路组成,用于实现光干涉信号的检测与解调、闭环反馈和角速度输出等功能,其原理图如图1所示。

图1 三轴一体光纤陀螺原理图Fig.1 Schematic diagram of a three-axis integrated fiber optic gyroscope
1.2 弹载三轴一体光纤陀螺组合模块化、集成化设计
由于战术武器轻小型化要求日益加剧,弹载三轴一体光纤陀螺须在满足精度要求的前提下进行轻小型化设计。传统三轴一体光纤陀螺在轻小型化设计过程中未能进行模块化、集成化设计,导致在减小体积和质量的情况下性能降低,无法实现部分组件及部件的单元测试,整机出现故障,难以进行模块化的拆卸返修等。
本文采用模块化、集成化技术进行轻小型化三轴一体光纤陀螺设计,首先将三轴一体光纤陀螺划分为1个陀螺光源模块及3个陀螺敏感模块。将光源恒流驱动与管芯温控的电路进行集成化设计,利用系统级封装(System in a Package,SIP)技术将光源恒流驱动电路、半导体制冷电路及运算放大电路进行数模混合封装。将用于闭环信号检测的陀螺敏感模块及对外数字通信的陀螺控制电路进行集成化设计,利用SIP技术将前置放大电路、AD转换电路、FPGA处理电路、DA转换电路、调制器驱动电路及数字量接口通信电路进行数模混合封装。基于上述数模混合封装芯片形成轻小型集成化陀螺电路。
SIP数模混合集成电路模块采用全气密陶瓷方形扁平封装(Ceramic Quad Flat Pack,CQFP),基本结构采用外壳加基板的形式,外壳为带底部热沉的陶瓷结构,由Kovar围框、外引脚连接器和盖板组成,通过气密缝焊工艺实现金属盖板与腔体的密封。盖板和围框材料为Kovar合金,底部热沉为MoCu材料,外引脚连接器为高温共烧陶瓷(High Temperature Co-fired Ceramics,HTCC)和Kovar金属组成。内基板采用低温共烧陶瓷(Low Temperature Co-fired Ceramics,LTCC)工艺和薄膜布线工艺加工。数模混合电路LTCC基板层数为7层,薄膜电路层数为1层。LTCC基板布线最小线宽为150μm,薄膜布线最小线宽为100μm。内部有源芯片和LTCC基板采用绝缘胶粘贴,表贴电阻和电容采用导电胶粘贴。电路模块封装内采用了高精度贴片工艺和细间距引线键合工艺等,芯片与阻容平铺,阻容最小组装间距200μm,引线键合最小间距57.5μm。
1.3 弹载三轴一体光纤陀螺组合环境适应性设计
弹载光纤陀螺组合根据武器系统使用情况的不同,对产品环境适应性的要求也有相应的区别。弹载光纤陀螺须满足-40℃~60℃的工作温度及一定量级的高、低频率机械振动及冲击。光纤陀螺工作环境的温度变化主要引起光纤折射率的变化,产生寄生相移,导致陀螺敏感光纤环产生Shupe效应,造成陀螺零位偏置变化。
设光纤环长度为,其中极小的一段长度为δ,其距离光纤环两端的距离分别为和-。为光纤传输折射率,当温度发生扰动时,引起的光纤折射率变化为dd,其对应的相位差为

(1)
式中,为光纤中光速;为光波波长。当为0或者时,即越接近光纤环的两端发生扰动时,引入的相位误差越大。另外,可以发现光纤环关于中心的对称位置同时发生温度变化时,产生的相位误差是一致的,因为Δ()=-Δ(-)。
光纤陀螺在工作过程中,光源会产生热量,是主要热源。这些热量通过传导、辐射和对流会传递到三路光纤陀螺敏感组件,进而影响光纤陀螺的性能,特别是小型化光纤陀螺,由于其传热路径短、热容量小和散热条件差,极其容易受到热源的影响。三轴一体光纤陀螺采用模块化设计,总体布局时将发热量较大的陀螺光源模块安装至散热较好的金属底板,将易受温度变化影响的陀螺敏感组件模块安装至远离热源且热传递缓慢的区域,以保证陀螺在温度变化较大的环境下精度满足要求。
振动及冲击环境下,影响光纤陀螺性能的主要原因在于,光纤陀螺中敏感元件光纤环在振动环境下性能下降,导致光纤的折射率和应力分布均发生变化。具体体现在振动引起的非互易相移变化,根据弹光效应理论,光纤受到外界应力影响导致其形状和折射率发生变化。因而,振动前后光波相移会有不同,光纤陀螺中相互传播的两路光波就会产生非互易相移,这种非互易相移导致的误差可以表示为
=cos(+)
(2)
式中,为受振动输入影响的非互易相移误差的幅值;为振动输入频率;为受振动输入影响的非互易相移误差的初始相位。该非互易相位误差会导致陀螺零偏发生变化,从而影响陀螺在振动环境下的测速精度。根据对弹载光纤陀螺实际运输及飞行振动、冲击环境的分析,须在设计过程中提高陀螺结构的刚度,并针对光纤陀螺的敏感模块进行减振设计,以避免导弹高频振动及冲击导致的光纤敏感环非互易相移变化。
三轴一体光纤陀螺结构主体材料选用高刚度、小质量的铝合金结构,在设计时通过增加关键部位厚度、优化器件安装方式等手段,提高结构强度,提升了陀螺抗冲击振动性能。通过有限元软件仿真分析,陀螺组合中易受振动冲击影响的陀螺敏感组件模块本体结构在3000Hz以内无谐振点。本体结构固有频率如表1所示,本体各阶模态的固有频率均高于一般导弹使用环境频率要求。

表1 三轴一体光纤陀螺敏感模块各阶模态固有频率Tab.1 Natural frequencies of three-axis integrated fiber optic gyroscope sensitive modules
为了进一步改善高频振动及冲击环境带来的陀螺性能下降,对三轴一体光纤陀螺敏感模块进行减振设计,采用内置橡胶减振器对敏感模块进行减振,可以显著降低陀螺敏感组件高频振动时的振动量级。将三维传感器粘贴在陀螺各轴敏感模块上,对产品进行20~2000Hz的高频随机振动。如图2所示,陀螺轴、轴、轴输入的高频振动在200Hz以上时,振动量级得到显著降低,减振效率达70%。

(a) X轴敏感模块
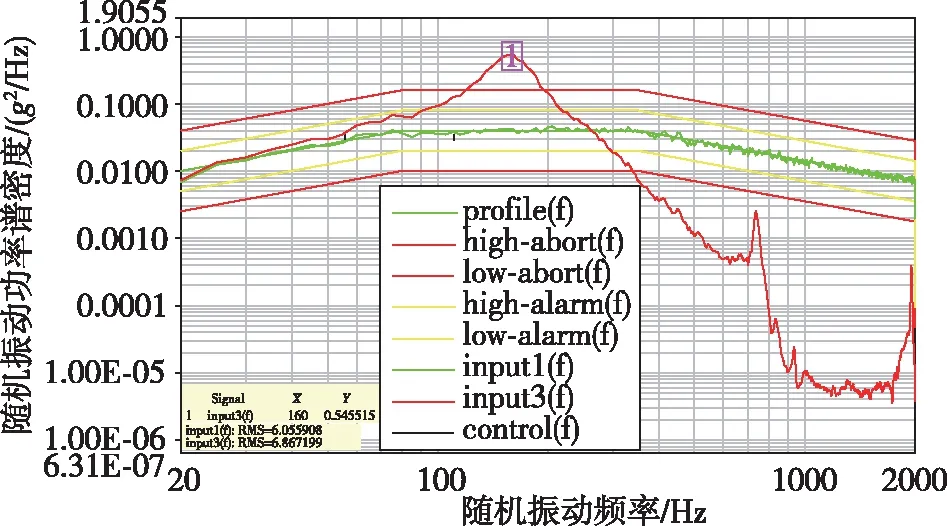
(b) Y轴敏感模块
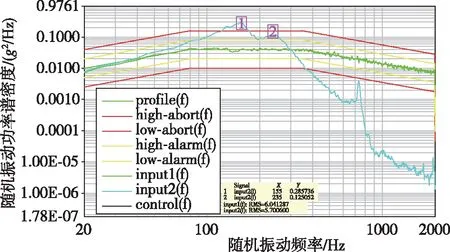
(c) Z轴敏感模块图2 高频振动下各敏感模块减振情况Fig.2 Vibration reduction of sensitive module under high frequency vibration
1.4 弹载三轴一体光纤陀螺组合接口适配性设计
弹载光纤陀螺组合由于需要适配不同的弹体体积空间,并根据系统需要与其余功能模块,诸如红外探测制导模块、姿态控制模块、导航捷联解算模块及弹上计算机模块进行一体化集成,因而需要进行陀螺模块化设计,并形成可以变更多种系统接口的三轴一体光纤陀螺组合。
为适应系统异形结构设计要求,可将陀螺敏感模块及陀螺光源模块进行不同机械排布。不同的机械排布可以实现机械接口的适应性匹配,优化热隔离设计,可根据系统要求与其余模块实现一体化设计,并根据线角耦合要求调整产品质心偏差,控制陀螺线角耦合指标。
2 弹载三轴一体光纤陀螺组合产品试验结果分析
2.1 弹载三轴一体光纤陀螺组合常温零偏性能
根据系统使用需求,陀螺考核一次上电启动零偏稳定性时间应不小于1000s。在常温无热机状态下,对三轴一体光纤陀螺组合上电测试2400s,陀螺各敏感轴模块输出如图3所示。三轴一体光纤陀螺轴100s平滑零偏稳定性为0.036(°)/h(1),陀螺轴100s平滑零偏稳定性为0.031(°)/h(1),陀螺轴100s平滑零偏稳定性为0.037(°)/h(1)。

(a) 陀螺X轴常温零偏输出

(b) 陀螺Y轴常温零偏输出
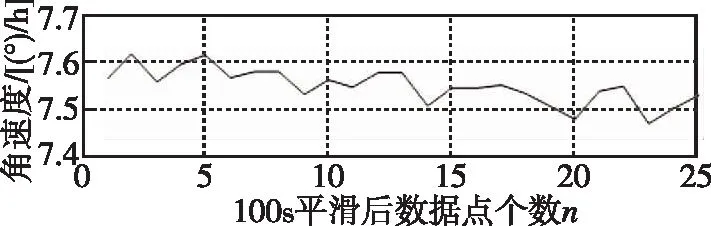
(c) 陀螺Z轴常温零偏输出图3 三轴一体光纤陀螺常温零偏输出Fig.3 Static zero deviation output curve of three-axis integrated fiber optic gyroscope under normal temperature range
2.2 弹载三轴一体光纤陀螺组合振动性能
根据系统使用需求,陀螺使用环境飞行振动频率一般为20~2000Hz,振动量级均方根加速度一般在6~13(为重力加速度)之间。将三轴一体光纤陀螺安装至电磁振动台,分别对三轴一体光纤陀螺、、三方向输入高频随机振动,振动频率为20~2000Hz,振动量级均方根加速度为13.44。记录不同方向振动输入下陀螺各敏感轴角速度信号输出,并计算振中输出偏差,结果如表2所示。

表2 三轴一体光纤陀螺组合高频振动各敏感模块角速度输出及振中输出变化量Tab.2 Sensitive module angular rate output and variation in vibration output under threee-axis high frequency vibration
2.3 弹载三轴一体光纤陀螺组合温度性能
根据系统使用需求,陀螺使用环境温度一般在-40℃~60℃。将三轴一体光纤陀螺放入温度试验箱,其温度变化范围为-40℃~60℃,温度变化梯度为1℃/min,全程采集陀螺零偏输出。陀螺输出曲线及外界温度变化曲线如图4所示。陀螺轴全温100s平滑零偏稳定性为0.067(°)/h(1),陀螺轴全温100s平滑零偏稳定性为0.056(°)/h(1),陀螺轴全温100s平滑零偏稳定性为0.075(°)/h(1)。

(a) 陀螺X轴全温零偏输出

(b) 陀螺Y轴全温零偏输出

(c) 陀螺Z轴全温零偏输出

(d) 外界温度变化图4 三轴一体光纤陀螺全温零偏输出Fig.4 Total temperature angle rate output of three-axis integrated fiber optic gyroscope under whole temperature range
3 结 论
本文通过采用光学及电子元器件SIP技术,实现了三轴一体光纤陀螺组合的模块化、集成化设计。通过模块化、集成化设计,优化与总体设计接口的适配性,与飞行控制系统集成实现了光电探测、惯性导航及姿态控制等功能。通过产品模块化设计、热设计及敏感模块刚度设计、减振设计,提高了陀螺一次启动零偏稳定性以及在温度变化、振动冲击环境下的零偏性能指标,陀螺一次启动零偏稳定性小于0.04(°)/h(1),-40℃~60℃温度范围内,温度变化梯度为1℃/min时零偏稳定性小于0.08(°)/h(1),高频随机振动振中零偏偏差小于0.4(°)/h。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
唯实(2021年12期)2021-04-12
通信产业报(2019年12期)2019-06-21
通信产业报(2018年26期)2018-11-22
中学物理·初中(2017年8期)2018-03-06
祖国(2017年14期)2017-09-04
世界汽车(2016年8期)2016-09-28
故事作文·高年级(2016年6期)2016-06-21
早期教育(美术教育)(2010年4期)2010-04-13
通信产业报(2009年2期)2009-06-09
