
柔性可穿戴传感器及大面积阵列制造新方法*
2022-08-26 00:24赵婷婷李痛快原理张建华
自然杂志 2022年4期
赵婷婷,李痛快,原理,张建华
上海大学 新型显示技术及应用集成教育部重点实验室,上海 200072
柔性可穿戴传感器的发展受人体皮肤的启发,主要用于人体生理特征参数(如心率、呼吸、肌电等)和周围环境中相关特征指标(压力/应变、温度、湿度等)的实时监测,在个人健康监护、人机交互体系以及人造电子皮肤等领域具有广阔的应用前景,是当下最前沿的研究领域之一[1-3]。世界各国纷纷制订了针对柔性电子器件的研究计划,将柔性传感技术作为国家发展战略的重要内容之一,如美国的FDCASU计划、欧盟的SHIFT和PolyApply计划,以及日本的TRADIM计划。健康界研究院发布的《2021中国智能可穿戴设备产业研究报告》预计,到2025年中国智能可穿戴设备市场规模将高达1 573.1亿元,前景可观[4]。
传感器本质上就是将待检测的外界刺激转换为可收集、可处理信号的一种器件。相比于传统的硅基传感器,柔性传感器通常制备在如聚酰亚胺(PI)、聚二甲基硅氧烷(PDMS)、热塑性聚氨酯(TPU)、纸张、聚乙烯醇(PVA)和纺织材料等柔性基材上[5-9],这赋予了传感器柔软、可延展、可弯折、可穿戴等特性。由于结构形式灵活,柔性传感器易顺应多种使用环境实现检测功能。柔性传感器种类繁多,按照用途可分为压力/应变传感器、温度传感器、湿度传感器、光学传感器等,按照工作机理可分为电阻式传感器、电容式传感器、压电式或电感式传感器等。
在这篇综述中,我们首先通过举例简要介绍柔性压力/应变传感器、温度传感器、湿度传感器及光学传感器的研究进展,并对柔性传感器涉及的关键技术参数,如灵敏度、线性范围、响应/恢复时间等进行概述;接着,对柔性传感器大面积阵列制造所面临的挑战及新方法进行阐述和分析;最后对柔性可穿戴传感器的发展方向进行总结和展望。
1 柔性传感器的类型
1.1 压力/应变传感器
柔性压力/应变传感器是一种能够将外部压力或应变刺激信号转化为电信号的电子器件,可用于人体生理信号(心率、呼吸节律等)、肌肉关节运动等监测。压力/应变信号到电信号的转变一般是通过压阻、压容和压电机理来实现的。其中,压阻,顾名思义就是将压力/应变信号直接转变成电阻信号测试出来。压阻式器件结构和信号读取系统相对简单,因而基于压阻机理的柔性压力/应变传感器应用最为广泛。
近年来,科学家们基于新型功能纳米材料和微纳结构,已经研制出多种高灵敏度、快响应的压力/应变传感器[10-11]。2019年,张建华团队[12]利用新型二维材料MXenes(Ti3C2)的优良导电性和天然织物表面波浪形的微结构,设计并制备出一种柔性织物压阻式压力传感器,如图1(a)所示。压力敏感层与电极间接触电阻值会随外部压力作用发生变化,从而实现压力的实时检测(图1(b))。该柔性传感器在0~29 kPa压力范围内具有3.844 kPa-1的灵敏度,在29 kPa~40 kPa压力范围内灵敏度为12.095 kPa-1,并具有快速响应性(响应时间约26 ms),可满足人机交互界面、脉搏监测、语音识别等柔性场合应用需求(图1(c~d))。Yuan等人[13]提出了一种基于MXenes/尼龙织物的可穿戴应变传感器(图1(e))。该传感器利用尼龙织物良好的透气性和拉伸性能,其应变系数(gauge factor, GF)在20%的轴向和径向应变范围内分别可达24.35和5.98,不仅可以监测人体关节的运动,还能紧贴在人的手臂上感知关节和肌肉的运动信号(图1(f))。Bai等人[14]提出了一种基于梯度自填充结构(graded intrafillable architecture,GIA)的电容式压力传感器,其压力敏感层由互补的凸起和凹槽微结构构成。在较小压力作用下,凸起微结构首先向下弯曲发生形变,引起器件电容值的变化;随着外加压力的增大,凸起微结构逐步填充凹槽,压力敏感层的厚度进一步被压缩,从而引起更大的电容值变化。相比于传统的半球结构、倾斜块体结构和无梯度自填充块体结构,该GIA在相同压力范围内具有更大的可压缩性(图1(f)),从而使器件具有更大的灵敏度(220 kPa-1,0.08 Pa~360 kPa)和较短的响应/恢复时间(9 ms/18 ms)(图1(g~h),且兼具良好的机械稳定性,不仅可以应用于人体健康监测,而且在空气动力学的压力测量领域也有潜在应用价值。

图1 柔性织物压阻式压力传感器[12]:(a)结构示意图;(b)工作机理示意图;(c)语音识别应用图。基于MXenes/尼龙织物的可穿戴应变传感器[13]:(d)结构图;(e)关节和肌肉的运动信号检测应用图。基于GIA的压力传感器[14]:(f)不同结构的应力分布仿真结果图;(g)器件灵敏度变化图;(h)器件响应和恢复时间图
1.2 温度传感器
体温是人们发烧、失眠、代谢功能障碍等疾病的重要生理指标。人体皮肤除了包含众多的力感受器外,同时还兼具感知温度的功能,使得人体免于外界环境的伤害。因此温度传感器作为监测人体体温和感知环境温度的电子器件,至关重要。目前大多数柔性温度传感器的工作原理是基于温度敏感材料在不同温度下其导电特性的变化来实现体温检测的[15-16]。
Gao等人[17]提出一种以Ti3C2Tx纳米颗粒-薄片复合网络材料作为温敏导电材料、热膨胀系数较大的PDMS作为基板的Ti3C2Tx-PDMS柔性温度传感器。随着温度升高,PDMS基板发生各向同性热膨胀,使附着在上面的导电网络材料产生更大尺寸裂纹(图2(a)),进而引起器件电阻值的变化,实现对温度的检测。该传感器具有高达986 ℃-1的灵敏度和较宽的工作范围(20~140℃),将其扩展为4×4的阵列传感器可成功绘制出手指、水杯和紫外灯等具有温度的物体的位置分布,表明其在近场物体温度分布检测方面的巨大潜力(图2(b))。Zhang等人[18]提出了一种基于超薄衬底的可穿戴柔性温度传感器,该器件的温度敏感单元由通过旋转光刻系统在PI导管表面制作的金(Au)多匝微线圈组成,环境热量与Au微线圈表面的热交换会引起器件电阻值的变化,即热阻原理,从而实现器件对温度的实时检测(图2(c))。该传感器可通过人体呼吸的温度识别出异常的呼吸信号(窒息和浅呼吸),如图2(d)所示,因此在睡眠呼吸疾病的初步诊断和睡眠健康监测方面具有很大的潜力。Gao等人[19]制作了一个厚度只有0.1 mm的有机水凝胶温度传感器,该器件使用的有机水凝胶材料具有热可逆凝胶性,即:环境温度升高时,这种有机水凝胶链开始解扭、折叠、聚集,形成大的致密链区,并在孔区出现孔隙结构,导致离子迁移阻力降低,离子迁移速率加快,器件电阻值减小;反之,器件电阻值增大。其所制备的温度传感器具有较宽的温度检测范围(-30~50 ℃),可以准确响应和记录皮肤表面的温度变化。
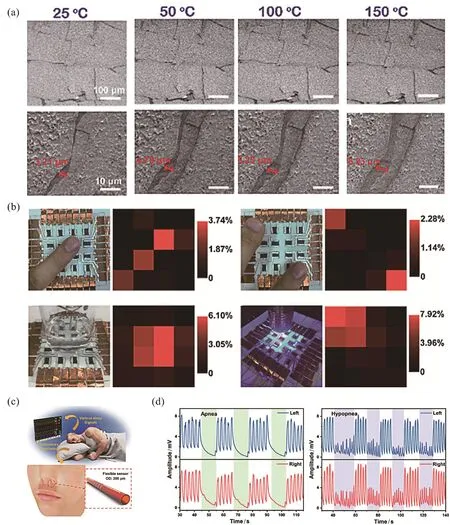
图2 基于Ti3C2Tx/PDMS的温度传感器器件[17]:(a)不同温度下器件表面导电材料裂纹的尺寸变化图;(b)温度分布识别应用图。Au/PI基温度传感器件[18]:(c)结构示意图;(d)识别窒息、浅呼吸信号的应用图
1.3 湿度传感器
湿度传感器可以对环境中的湿度水平作出定量评价,因此在人体呼吸模式检测、语音识别、人机交互界面等领域受到广泛关注。与柔性温度传感器类似,湿度传感器的典型策略是检测不同湿度水平下各种传感材料的电导率变化[20]。
到目前为止,各类湿度敏感材料,如石墨烯(graphene)[21]、氧化钼(MoO3)[22]和金属卤化物钙钛矿等[23-24],由于具有比表面积大、亲水性好等特性,已经成为湿度传感器的核心材料。其中,二维过渡金属碳化物MXenes具有独特的富羟基纳米结构,亲水性佳,因而受到湿度传感器研究人员的青睐[25-26]。Yang等人[27]提出了一种经氢氧化钠溶液处理的碱化MXenes(AMX)材料,由于碱金属离子(Na+)的插层和表面末端氧-氟的增加,AMX器件具有优异的湿度灵敏度(S=300),如图3(a)和(b)所示。然而,由于Na+和水分子形成的离子簇移动速度较慢,该传感器的响应时间(1 s)和恢复时间(210 s)较长,极大地限制了它的应用范围。2022年,张建华团队[28]提出了一种基于碱化MXenes和聚多巴胺(PDA)形成的杂化材料(AMP)的柔性湿度传感器(图3(c))。其优势在于:一方面PDA聚合物含有大量的羟基(OH),羟基可以通过可逆氢键与水分子快速结合、分离导致氢键线/网络的变化,引起材料导电性的变化;另一方面碱化MXenes具有独特的类手风琴的层状纳米结构,比表面积大,因此PDA包覆在MXenes表面形成杂化材料AMP后,增加了与水分子之间的相互作用面积,从而使得相对湿度(RH)的微小变化就可以显著改变AMP杂化材料的导电性。研究表明,该器件具有较宽的检测范围(5%~95% RH),较高的灵敏度(S=17 875)(图3(d)),较短的响应和恢复时间(分别为0.4 s和0.5 s)。得益于该器件的优良性能,其可作为非接触式开关实现对电子器件的控制和用于区别人体在休息、行走后、跑步后三种状态下的呼吸模式,如图3(e)和(f)。

图3 基于AMX的湿度传感器[27]:(a)AMX表面H2O分子吸附的工作机理示意图;(b)基于MXenes和AMX的器件对湿度的响应对比。基于AMP的湿度传感器[28]:(c)结构示意图;(d)不同相对湿度条件下器件电阻值的变化图;(e)人体呼吸非接触控制灯泡开关图;(f)人体在不同状态下,器件检测到的呼吸模式图
1.4 光学传感器
光学传感器是一种用于检测各类光参数(如波长、频率、强度或偏振等)的器件,常见的光学传感器是基于光电原理,将光信号转换为可测量和记录的电信号来实现检测的,因此光学传感器也常被称作光电探测器,在环境监测、图像传感、监控、智能手机等领域都有十分重要的应用价值。
Song等人[29]设计并制备了一种具有较宽光谱响应范围(300~1 000 nm)的有机光电二极管(organic photodiode, OPD)。利用低带隙受体和厚结相结合的策略,可将器件暗电流降低到0.35 nA/cm2。同时,该器件在7个数量级以上的光强范围内(LDR为157 dB)均具有线性响应,截止频率高达4.5 kHz,总体性能可与晶体硅基OPD相媲美。2020年,张建华团队[30]提出一种基于超小氧化镍(NiOx)纳米晶体材料(5~10 nm)的OPD,其结构示意图如图4(a)所示。研究人员利用NiOx高的最低未占轨道(LUMO)能级阻断了来自外部偏置的暗电流,使所制造的OPD暗电流降低了一个数量级以上,如图4(b)所示。
X射线探测器作为一种特殊的光电探测器,是将X射线能量转换为可处理的电信号的传感器件,广泛应用于医学成像、癌症治疗、工业无损检测、光电子能谱分析等众多领域。目前X射线探测器根据探测原理分为直接型和间接型两种:间接型探测器是先利用闪烁体将X射线转换为可见光光子,再通过光电二极管阵列将可见光光子转换为电荷信号的器件;而直接型探测器避免了间接型X射线探测器中的光光转换过程,利用直接带隙半导体材料实现X射线到电信号的转变。直接型X射线探测器在结构方面更加简单,制备工艺也相对简单,具有较高空间分辨率和成像质量[31]。张建华团队[32]提出了一种基于无毒微金字塔三斜铋(ω-Bi2O3)油墨的直接型X射线探测器(图4(c))。该探测器暴露在开关的X射线源下1 500 s(共5 120 mGy剂量)后,相当于进行了2.56万次胸部X射线扫描,依旧未表现出明显的性能差异,如图4(d)所示。Demchyshyn等人[33]设计并制备了一种基于混合阳离子与卤化铅钙钛矿的柔性轻质直接型X射线探测器,如图4(e)所示。该探测器经过界面修饰在0 V工作电压下依旧可以对X射线进行探测并展现出(9.3±0.5)μC·Gy-1·cm-2的高灵敏度和(0.58±0.05)μGy·s-1的低检测极限(图4(f))。

图4 基于NiOx的OPD[30]:(a)结构示意图;(b)有无NiOx的两种器件在黑暗/有光条件下的电流密度对比图。基于ω-Bi2O3的X射线探测器[32]:(c)ω-Bi2O3材料的SEM图像;(d)器件在X射线源照射下产生的光电流图。钙钛矿型X射线探测器[33]:(e)结构示意图;(f)0 V偏压下器件产生的光电流随剂量率的变化图
2 传感器的关键技术参数
为了评估柔性传感器的器件性能,需要对器件的性能参数,如灵敏度、线性度、响应时间、稳定性等进行表征,而这些性能参数是选择应对不同场合传感器的重要依据。这里我们以柔性力学传感器为例来介绍柔性传感器涉及的关键技术参数。
2.1 灵敏度
柔性传感器灵敏度的定义为:在受外界刺激后,指定输出量的变化率与指定输入量变化值之比。灵敏度根据定义可以表示为S=ΔE/(ΔS×E0),其中ΔE是电信号的变化(例如电流、电容、电压等),ΔS为外界刺激的变化值,E和E0分别为受到外界刺激时实时电信号和初始无外界刺激的电信号。以柔性压阻式压力传感器为例,其灵敏度主要取决于材料和界面结构等。2019年Zhao等人[34]巧妙地利用绿萝叶子表面天然的微结构阵列和糖颗粒作为模板,制备了具有复合多孔微结构的导电聚合物薄膜,证实基于该复合多孔微结构的柔性力学传感器的灵敏度相比于基于实体微结构的传感器提高59%,如图5(a)所示。对于湿度和温度传感器而言,典型的感知策略是检测传感功能材料在不同湿度/温度水平下电导率的变化,因此其灵敏度主要取决于传感功能材料。例如,相比于一维材料,二维材料具有更大的比表面积和丰富的表面官能团,可以更好地促进水分子的吸附,从而提高湿度传感器的灵敏度。
2.2 线性范围
输出信号和输入信号之间的线性关系可以简化数据处理和降低系统复杂度,因此线性范围是柔性传感器另一个重要的性能参数。柔性力学传感器的线性范围与采用的传感材料和结构息息相关。例如:Xu等人[35]制备了基于硼砂/PVA的高度可拉伸自修复的纳米复合水凝胶,克服了其导电网络在大应变下不均匀变化导致的线性范围窄的难题,该应变传感器在0~100%的应变范围内保持约1.86的灵敏度,如图5(b)所示。Zhao等人[36]首次提出以具有天然多级锥结构的野菊花花粉作为模板,采用二次复型工艺制备了具有仿花粉结构的压阻式传感器,实验证实该柔性传感器在0~218 kPa的宽线性响应范围内,显示出3.5 kPa-1的高灵敏度(R2为0.997),如图5(c)所示。但总的来说,传感器的高灵敏度和高线性度之间相互制约。因此,开发同时具有高灵敏度和高线性度的柔性可穿戴传感器仍然是一个巨大的挑战。
2.3 响应时间
响应时间一般定义为达到稳定输出的90%所需的时间,反映了传感器响应阶跃输入的速度。大多数基于聚合物的柔性力传感器由于材料的黏弹特性存在响应延迟[37-38]。目前已有相当多的研究证明可以通过材料和结构(如多孔体)的设计来减少聚合物黏弹性的影响,从而改善柔性力传感器的响应时间。如Cheng等人[39]报道了一种以硅纳米线(SiNWs)为功能层的新型压力传感器。SiNWs是固有的弹性晶体,没有黏弹性,因此以SiNWs为弹性层的器件设计具有可忽略不计的界面附和力,大大降低了该传感器的响应时间(约3 ms),如图5(d)所示。Yang等人[40]展示了由多孔金字塔介电层组成的柔性高灵敏电容式压力传感器,通过多孔结构和特殊的表面结构减小了界面黏弹性的负面影响,利用表面微观结构的变形代替了块状薄膜的变形,导致迟滞作用减小,器件的响应和恢复时间分别为50 ms和100 ms,如图5(e)所示。

图5 (a)基于仿生复合多孔微结构的高灵敏柔性力学传感器[34];(b)自修复水凝胶应变传感器(0~100%的应变范围)[35];(c)基于仿生多级结构的宽线性范围的柔性力学传感器;(d)基于硅纳米线的柔性压力传感器(响应时间约3 ms)[39];(e)基于多孔金字塔微结构的压力传感器(响应和恢复时间分别为50 ms和100 ms)[40]
2.4 稳定性
除此之外,柔性传感器在长时间的循环使用下能够保持稳定可靠的输入输出关系是另一重要指标,通常需要测试连续施加和撤除外界刺激下的传感器的性能。由于力学传感器在循环过程中常常伴随着导电网络的破坏与重组,在最初的几个循环下,传感器的性能会产生漂移,随着循环次数的增加,传感器性能逐渐趋于稳定。稳定性试验没有设定具体的循环次数作为标准,但在大多数柔性压力传感器的报告中,通常采用5 000次以上的循环次数[41]。
3 柔性传感器的大面积阵列制造方法
柔性可穿戴传感器感知的信号通常还包含外界刺激的空间位置信息,譬如压力分布信息、多点形变信息、温度场信息和湿度分布等,而单个柔性传感器无法反馈这些空间信息,因此阵列传感器的设计及大面积制造方法引起了研究人员的广泛关注[42-43]。传感器实现大面积阵列制造常伴随着电路复杂、功耗高和信号串扰等难题。目前报道的传感器件制备工艺过程很难实现柔性大面积阵列化制造,导致传感的分辨率和维度不高,实际应用范围受限。如何突破现有传感器件制造的技术局限,获得高灵敏、高密度和大面积柔性传感器是当前研究的最大瓶颈问题。
3.1 薄膜晶体管(TFT)的优势
薄膜晶体管(thin film transistor, TFT)由于具有高密度制造、高分辨率、节能化、轻便化等特性,已成功地作为有源元件应用于显示领域[44]。借助于TFT的信号放大功能和柔性阵列制造优势,将其与传统柔性传感功能单元集成起来,可提高传感的灵敏度和维度。这种基于TFT的传感技术为解决传感器在柔性衬底上阵列化提供了极大的潜力和发展空间。根据半导体材料的类型,常见的TFT可以分为非晶硅TFT(a-Si TFT)、低温多晶硅TFT(LTPS TFT)、有机TFT(OTFT)以及金属氧化物半导体TFT(MOTFT)四种。其中:a-Si TFT工艺成本低,良品率高,但迁移率低(最大只有1 cm2·V-1·S-1),不利于高速阵列采集;LTPS TFT载流子迁移率高,但制备工艺涉及高温(500 ℃左右),超过了大多柔性衬底的耐受温度,与柔性器件制备工艺不兼容;OTFT具有制作成本低和工艺温度低的特点,目前基于OTFT的传感器报道较多[45-47],然而OTFT的放大受限于其低场效应迁移率,且器件的电学稳定性较差;MOTFT技术易于实现低成本的大面积制造,同时表现出相对较高的场效应迁移率,可提供更快的响应速度、更强的放大效果和更低的能耗,但器件可靠性易受环境影响。
3.2 基于TFT的阵列传感器工作原理
TFT包含源极(S)、漏极(D)和栅极(G)三个引出电极。当施加的栅极电压VGS超过一定阈值时,就可以控制电子流过源、漏两极,这样通过输入微小的电压变化就可以调控源漏电流IDS的大小。基于TFT的传感器在外部刺激的作用下,利用传感器对TFT的源漏电压VDS、栅极电压VGS、栅绝缘层电容Ci的影响,改变IDS的大小,通过IDS来反映外界刺激的变化。源漏电压VDS可通过在TFT源极或漏极串联电阻式传感器来调控。在外界刺激的作用下,传感器电阻发生变化,影响其压降,从而影响VDS发生变化,如图6(a)所示。栅极电压VGS可通过在栅极串联电阻式传感器或利用压电式传感器作为浮栅提供栅极电压来调控,通过传感器来改变VGS从而调节IDS,如图6(b)和6(c)所示。除此之外,将传感器作为TFT的可变电介质层,在外界刺激的作用下改变TFT的栅绝缘层电容Ci也会使IDS发生变化,如图6(d)所示。TFT在阵列传感器中起到控制和放大的作用,基于TFT的阵列传感器具有大面积、高密度、高灵敏度和低功耗等优点。此外,由于采用TFT有源矩阵的形式,基于TFT的阵列传感器具有低串扰、高对比度等优点,并极大地简化了寻址模式,对于m×n的传感器阵列仅需m+n条寻址行就可以监控所有传感器的变化,如图6中间示意图所示。

图6 柔性传感器和薄膜晶体管的集成方式:(a)电阻式传感器串联于TFT源极或漏级;(b)电阻式传感器串联于TFT栅极;(c)压电式传感器充当TFT浮栅;(d)传感器充当TFT的可变电介质层
3.3 基于TFT的阵列传感器
研究人员基于3.2中提及的工作原理设计并制备了多种基于TFT的阵列传感器结构。例如:Wang等人[48]利用皮质醇适配体与氧化铟(In2O3)纳米薄膜的耦合机制,开发了一种柔性场效应晶体管(field effect transistor, FET)生物传感器阵列。利用适配体的分子进行皮质醇的识别,并通过FET进行电信号放大,可检测到更低水平的皮质醇。该器件与可穿戴手表集成后,可实现无缝、实时的皮质醇检测。Nela等人[49]提出了一个基于碳纳米管(CNT)TFT有源矩阵的高性能柔性压力传感器,并且在4英寸基板上成功制作了16×16像素的大面积阵列,能够以低至4 mm的单像素空间分辨率检测复杂物体的位置分布信息。Baek等人[51]设计并制备了一种基于有机TFT(OTFT)的低功耗、高灵敏度的柔性有源压力传感阵列,如图7(a)所示。该OTFT的S/D电极由具有微结构的弹性体和导电材料组成。在压力作用下,S/D电极发生压缩变形,改变有源沟道的几何形状和接触电阻,导致S/D电流值变化。该5×5有源阵列的空间分辨率为12.83 ppi,可映射出字母“E”的平面位置(图7(b)),可与人类的触觉感知相媲美。
张建华团队长期致力于基于a-IGZO TFT的集成式传感器的材料和制备工艺开发[5,52-56]研究。2018年,该团队[55]利用微结构化的PDMS电容和a-IGZO TFT,提出了一种集成电容式压力传感器件,并成功地在5 cm×5 cm柔性基板上实现了4×4阵列传感器制造。通过a-IGZO的放大效应,器件在超低压状态(≤1.5 kPa)检测的亚阈值区域表现出较高的灵敏度(35.9 kPa-1),而在低压状态(≤7 kPa)检测的线性区域表现出良好的线性度。在柔性可穿戴传感器的应用环境中,往往需要收集多种参数,除了可提供物体的质量和形状信息的力学参数,还包含提供物体热信息的温度参数。2021年张建华团队[56]提出了一种基于a-IGZO TFT阵列的柔性双参数传感阵列,温度和压力传感像素点数目分别为6×4和7×4,如图7(c)所示。由于温度和压力传感器相互独立,产生的传感信号不会受到干扰,该传感器不仅能够高选择性地同时检测两种物理信号,且具有高灵敏度,其中温度灵敏系数为-0.04 ℃-1(25~40 ℃),压力灵敏系数为13 kPa-1(0~6 kPa)和140 kPa-1(6~10 kPa),如图7(e)和7(f)所示。

图7 柔性有源压力传感阵列[51]:(a)器件结构示意图;(b)字母“E”和器件对其位置映射图。柔性双参数温度-压力阵列传感器[56]:(c)器件结构示意图;(d)阵列传感器实物照片;(e)不同温度和(f)不同压力下的器件电流变化率曲线图
4 结论与展望
柔性可穿戴传感器是穿戴式电子器件及系统的重要研究方向之一,在康复医疗、人机交互、电子皮肤等多领域有广泛的应用,其本质就是将待检测的外界刺激转换为可收集、可处理的信号从而指导系统的控制与反馈。如何准确地获取外界刺激,保证信号反馈的精准性是柔性可穿戴传感器的关键,这就需要传感器具有高灵敏度、宽线性检测范围和出色的稳定性等,也需要传感器具有阵列检测和多功能检测的能力。虽然柔性可穿戴传感器在这些方面已取得了令人瞩目的进展,但未来仍面临着一些困难需要克服和深入研究。
(1)目前柔性可穿戴传感器的研究主要集中在单参数传感上,然而单一参数的传感得到的信息量有限,已无法满足实际的应用需求。例如,仿生电子皮肤需要对压力、温度、光等多个参数同时进行感知才能获取接触物体的完整信息。因此,实现柔性传感器的多参数化是未来传感器发展的一个重要趋势。
(2)与单参数传感器的发展相同,多参数传感器也同时需要满足集成化、小型化、柔性、大面积阵列的要求。由于多参数传感器中每一个单参数传感单元的材料和结构都不尽相同,增加了其制备工艺的难度。因此实现多个单参数传感器的集成制造,包括材料和工艺兼容性,是研究的重点与难点。
(3)柔性可穿戴传感器需要复杂的信号采集和处理过程,后端的信号采集、处理模块与柔性不兼容,极大限制了可穿戴电子器件的实际应用。因此,如何简化传感器的信号采集系统,实现柔性可穿戴传感器的无线感知,增加传感器的可穿戴性还需要进一步研究。
(4)传统的AR和VR技术仅仅依靠视觉或听觉刺激来实现人机互动体验,缺少真实的感知反馈,且这些设备由笨重和刚性的部件组成,极大地影响了用户体验感。因此,如何将新型柔性可穿戴传感器与AR、VR技术融合,实现多参数的感知反馈,使用户拥有更真实的虚拟体验将是新兴的研究热点。
(5)现阶段的柔性可穿戴传感器仅仅能检测外部刺激,然而人体皮肤的感知系统不仅能够感知外部刺激还能储存刺激、分析刺激并对刺激做出响应。因此,如何使柔性可穿戴传感器具有类似皮肤的感知与记忆功能从而实现智能感知是下阶段柔性可穿戴传感器研究的重点与难点。
猜你喜欢
机电安全(2022年5期)2022-12-13
物流技术与应用(2022年5期)2022-06-17
科技创新与应用(2021年10期)2021-03-15
文化创新比较研究(2020年7期)2021-01-13
科学(2020年1期)2020-01-06
汽车零部件(2019年7期)2019-08-16
北京航空航天大学学报(2016年6期)2016-11-16
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
同位素(2014年2期)2014-04-16
电子世界(2004年5期)2004-07-26
