垃圾处理场所地下水污染监测方法研究
——以北天堂简易垃圾填埋场为例
2022-08-25 13:28卢志坤娄雅琢
四川环境 2022年4期
崔 萌,杨 虹,卢志坤,吴 薇,娄雅琢
(1.河北省承德生态环境监测中心,河北 承德 067000;2.承德市生态环境局,河北 承德 067000)
引 言
地下水是我国最重要的水资源之一,中国的水资源总量的30%和供水总量的20%来自地下水[1]。与地表水相比,地下水具有易于提取,水质更好的优点[2]。根据来自195个城市的调查数据,只有3%的城市没有地下水污染[3]。垃圾处理场所是地下水污染的主要来源[4]。垃圾处理场所的渗滤液具有较高的地下水污染风险,对地下水进行正确污染评价对附近农田和灌溉等设施有益[5]。为了降低我国地下水遭受污染的概率,急需提供一种监测方法来针对处理厂下的地下水进行长期污染监测。
目前,常用于地下水污染监测的方法有很多,最常见的为高通量测序技术,探地雷达方法,过程数学模拟法等,其中探地雷达方法的应用也逐渐增多,包括了将探地雷达应用于石油污染区域的地下水污染检测,也有研究利用探地雷达来对地下水污染进行追踪,大量的研究结果表明了探地雷达在地下水污染监测中具有普适性好,易于推广,可操作性强等特点[6]。鉴于探地雷达的优点,本次研究从污染风险更高的垃圾处理场出发,将探地雷达法用于垃圾处理场所地下水非水相液体(LNAPL)数量和含量测定,以期更好地服务于垃圾处理场的地下水质量,为垃圾处理场所的地下水污染监测提供借鉴。
1 地下水污染风险评价方法
探地雷达是几十年前开始发展的探测技术,探地雷达是一种无损探测技术,并且探测速度快,主要是用于工程勘察工作。近年来,探地雷达开始被常用于地下水污染检测中,借助探测雷达的相关优点,可以快速精准的判断出垃圾处理厂地下水中的污染风险。本次研究中便将探地雷达应用于垃圾处理厂下的地下水污染物LNAPLs的检测中,并以此为基础构建地下水污染物实时监测体系,利用监测体系来实现地下水污染的风险评估,以期实现垃圾处理厂地下水的管控,降低地下水资源所受到的污染。
1.1 探地雷达LNAPLs模型的建立
探地雷达方法操作简便,不会对环境造成二次污染,适用于垃圾处理场所等大范围监测,监测成本低[7]。通过探地雷达对垃圾处理场所地下水中LNAPL所发出的电磁波进行监测,可以有效地检测出垃圾处理场所的地下水污染程度[8]。图1为探地雷达的数据处理和工作流程图。由于LNAPL在土壤中以四种相态的形式存在,自由相是其主要存在与表现形式[9]。当LNAPL被释放到地下环境后,由于重力作用而向下渗透而不受阻碍,此时通过探地雷达可以将探测到的原始数据进行指数增益,在得到数据后,进行污染指数预测,当泄漏的LNAPL污染物量较少且LNAPL达到一定深度时,当重力成为主要驱动力存在且LNAPL在垃圾处理厂所的地表具有较高浓度时,探地雷达会自动对数据进行脉冲处理,此时重力对LNAPL迁移的影响减弱。由于LNAPL饱和度随着地下水深度的增加而逐渐降低,所以最后需要对探测进行带通滤波,以增加探测深度,在浸没表面上方实现稳定状态。
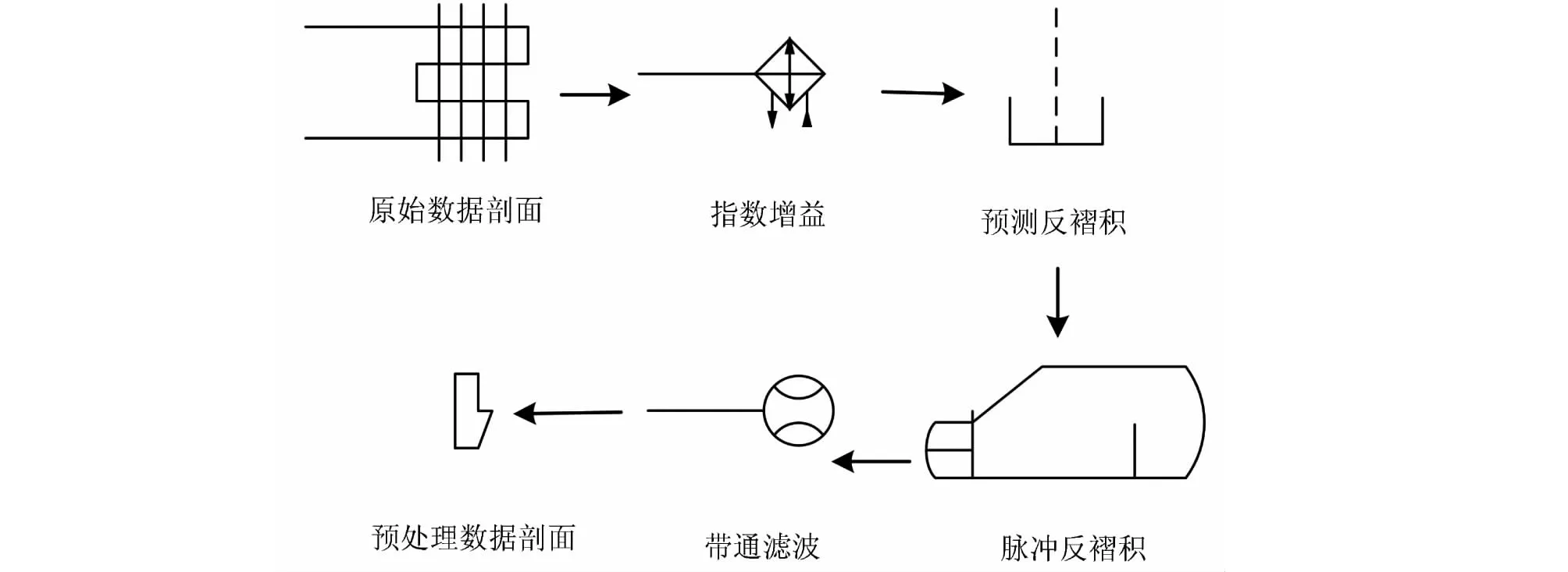
图1 探地雷达数据处理流程图Fig.1 Flow chart of GPR data processing
LNAPL在到达浸没表面后不能向下迁移,而是在表层土壤带中横向迁移,因此其污染物的含水量会影响探地雷达的响应,特别是在在没有水力梯度的情况下,LNAPL被限制在潜水面周围的区域,少量可溶物质溶解在地下水中,此时探地雷达对污染物的监测会出现偏差[10]。因此LNAPL渗透模型的建立是探地雷达前瞻性建模的基础[7]。图2(a)为初始概念模型图,利用NAPL simulator模拟软件创建了一个渗透模型,该模型模拟了稳定平衡状态下地下水环境LNAPL的自由渗漏过程。根据K-S-P三者的关系,模拟LNAPL在地层的浸出过程,模型为75cm×100cm,左右边缘闭合,上下边缘相连,顶部边缘顶部高度为0,与大气压接触的面积是82cm×79cm,重力加速度为990cm/s2,下限高度为5cm,平均土壤孔隙率为0.372%,其各参数均匀且各具备同向性,注油点位于模型中心9cm深。与中心相距1cm,共有8个注油点,总长为7cm,注油时间为3min,注油速度为0.79mL/s,在注油结束时,LNAPL 自由泄漏,并记录60min的泄漏过程。图2(b)为模型静止后含水量分布图,模型潜水面深度为50cm,在纵向上,含水饱和度随深度缓慢增加,34cm左右的位置上含水饱和度迅速增加,在50cm后的位置达到饱和。
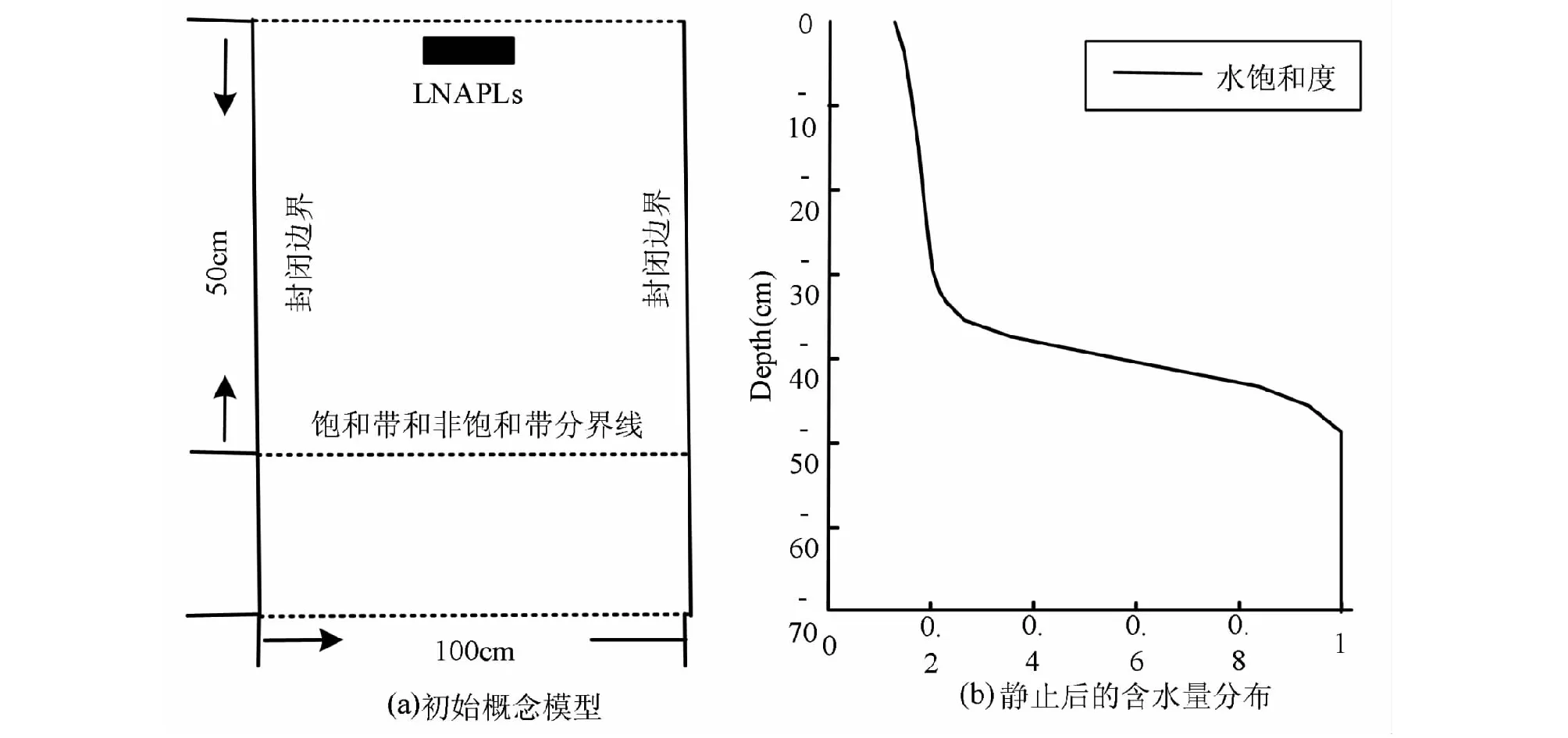
图2 初始概念模型和静止后的含水量分布Fig.2 Initial conceptual model and water content distribution at rest
1.2 地下水污染监测体系的构建
探地雷达对地下水LNAPL的监测依赖于地下水LNAPL含油饱和度的测量,LNAPL含油饱和度越高,则探地雷达所得到的波就越短,表明LNAPL对垃圾处理场所污染越深[11]。因此,对地下水中LNAPL含油饱和度的监测是其核心所在。图3是LNAPL渗透模型的含油饱和度分布图,它模拟了60min的LNAPL自由渗透时间。收集的数据在几个典型的时间点被检索,即模型从初始状态下的自由渗透过渡到100%含水量再到达到注油前的稳定状态,模型模拟了0~5 000s之间的LNAPL自由渗透状态和具体多少,以及剖面被注油后的3min后,停油后30min,停油60min后的状态。当油液自由向下移动直到停止供油时,上部的流量浓度继续向下移动,下部动力分布的浓度也低于原来的浓度。由于该模型底部落差恒定,无雨水沉淀,无抽水孔。在随后的监测阶段,LNAPL横向偏移最大,在纵向上,LNAPL实际上停止并稳定,最终在潜水面上形成了一个大的下降坑。因此整个过程深度地模拟了垃圾填埋场地下水中污染物对地下水含水量变化的影响[12]。
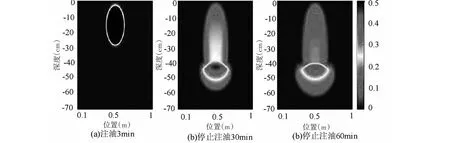
图3 含油饱和度分布图Fig.3 Oil saturation distribution
地下水LNAPL含水饱和度是除了含油饱和度之外的另一个重要监测方面,由于垃圾处理场所地下水深度的原因,油在地下水深层含量较少,因此仅仅对含油饱和度进行监测难以真实反映地下水深处的LNAPL污染[13]。图4显示了当LNAPL向下迁移时的土壤水分饱和度图,反映了LNAPL引起的土壤水分含量变化过程,在石油向下运移而形成的自由通道过程中,该通道内土壤的含水量也呈通道状,与环境差异显着,且含水量越高,其差异越大。在注油结束后第3分内,LNAPL的液体形状近似直线,在2至30cm的顶部、底部和深度均具有高含油饱和度的特征,在注油结束后30min,液态油进入浸入面,LNAPL流体通过可见重力渗透,随后动力分布开始发生变化。在积油的潜水面上,表层水被置换,其含量减少,形成下降趋势,浸没的含水层表面明显发生变形,LNAPL污染物主要分布在潜水面以上的空间,因此该图可用于分析和检测LNAPL在垃圾填埋场所的地下水中的存在[14]。
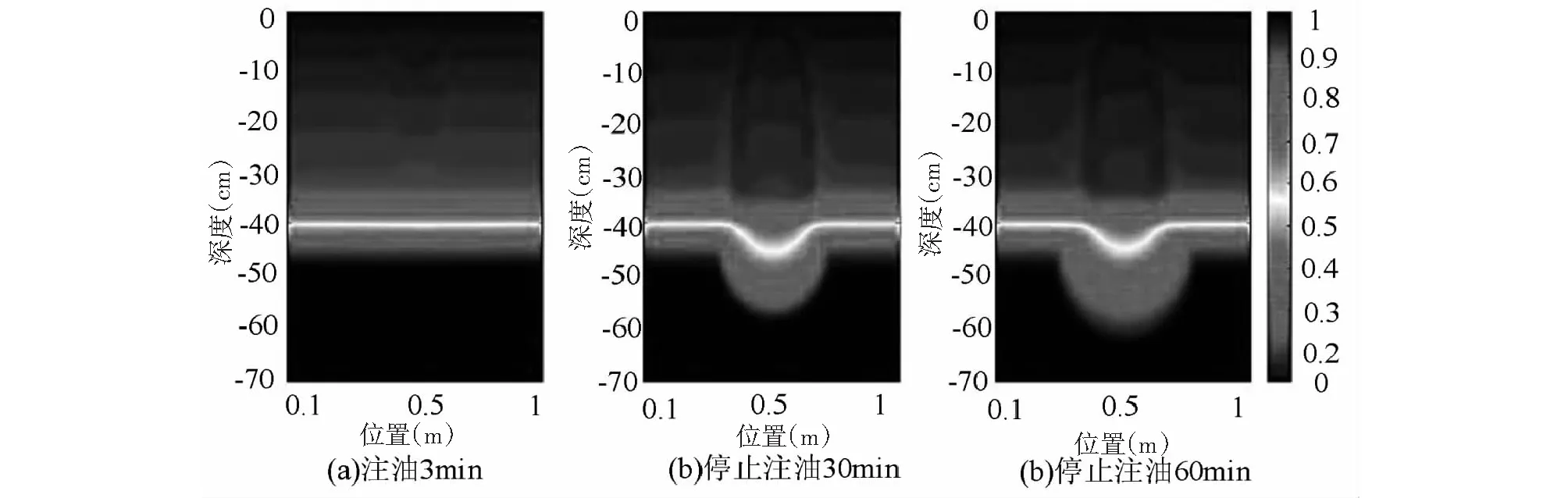
图4 含水饱和度分布图Fig.4 Water saturation distribution
2 某地垃圾处理场地下水污染监测分析
2.1 LNAPL浓度监测分析
垃圾处理场的地理特征决定了垃圾处理场的地形,地形的不同决定了LNAPL的分布,一般而言在山谷LNAPL的浓度低于平原。对于LNAPL而言,其污染物在垃圾处理场所主要以溶解相而存在,溶解相也作为其核心存在,溶解相是一部分LNAPL溶解在水中并与水混合的产物。在实际监测中,需要对不同的地形进行分别的监测[15]。图5反映了研究主要参数的地理位置分布,包括供水
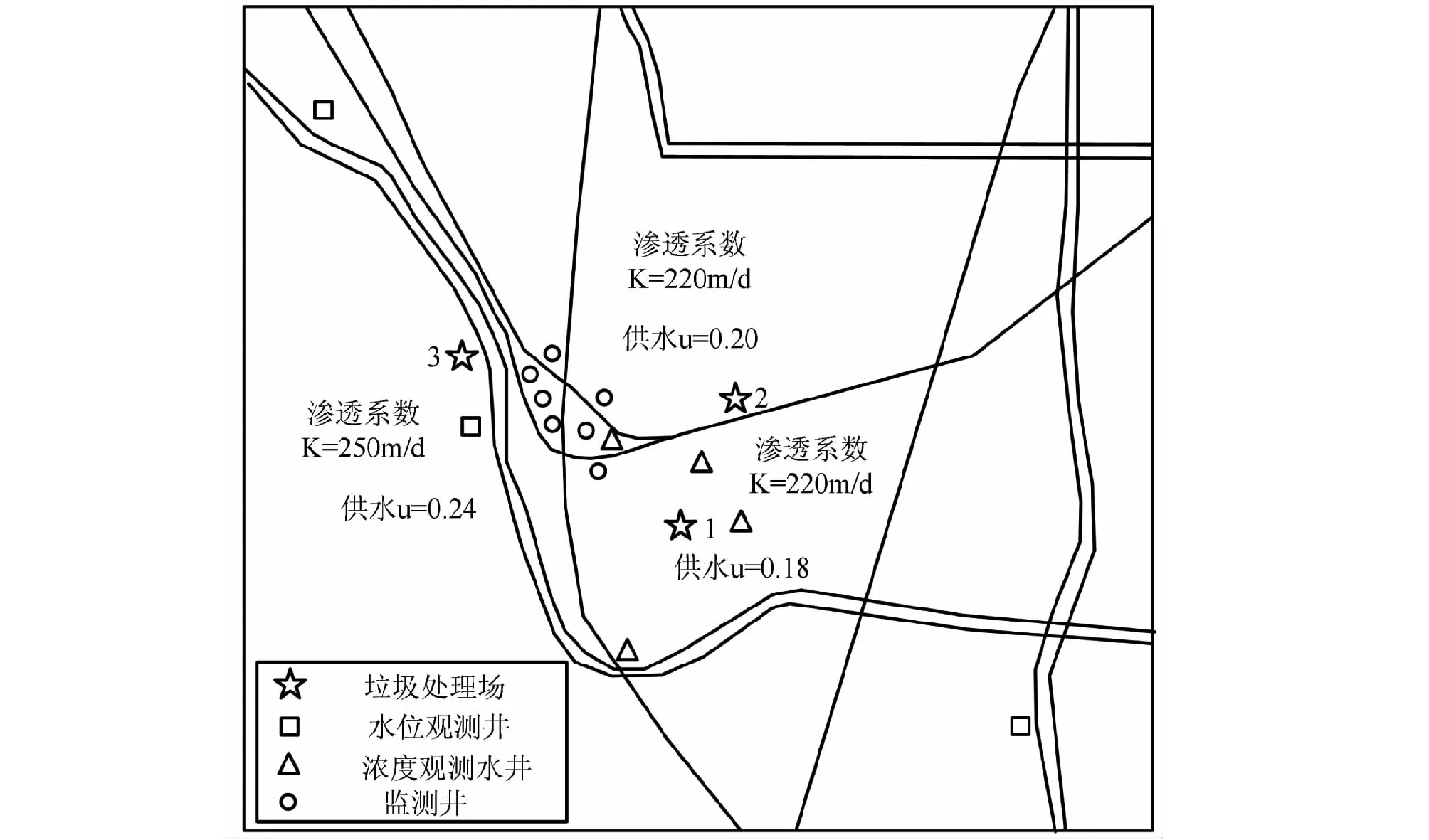
图5 研究区模型主要参数分区图Fig.5 Subdivision of main parameters of the study area model
(u)和渗透系数(K)的具体结果。其中1号垃圾处理场位于渗透系数相对于背风坡更低,供水度为0.18,渗透系数为220m/d;2号垃圾处理场位于山体背风坡中段,降水稀少,土壤干燥,其供水度为0.20,渗透系数为220m/d;3号垃圾处理场位于山体迎风坡中段,受盛行西风的影响,降水丰富,土壤湿润,且临近河流,受湿润空气影响,因此供水度为0.24,渗透系数为250m/d,相对于1号和2号垃圾处理场的渗透系数更高。
研究区域中7个垃圾处理场所的总面积是647 700 m2,两个渗水检测值中的LNAPL记录浓度分别为0.21m3/m3和0.16m3/m3,土渗透系数为0.05 m / day,过滤漏水面积约5000m2,过滤水的生产时间为1d,粘土层厚度约为2m,计算得出垃圾处理场源头和地下水面处垃圾渗滤液的年平均日产生量、分别为和,垃圾处理场源头和地下水面处LNAPL浓度和分别为0.26m3/m3和0.44m3/m3。
对于风险受体处的LNAPL浓度的监测,需要通过分析研究区的地质条件,水文地质条件和其他数据。各水位观测点的水位观测值与计算值的拟合曲线如图6所示。设雨水入渗系数为0.55,产水量为500 000m3/(k·m2),含水层渗透系数为200~300(m / d),由于地下水的流入和流出受到测量区域的土壤密度、土壤含水量、径流流量等诸多自然因素的影响,因此渗滤液顶端的自由表面是系统的上限,由大气降水来补充,其他极限值没有地下水,水流流量极限为零[11]。对地下水流模型进行了识别和验证,通过反复调整模型参数,得出了很好的拟合效果,这表明流量模型能较好地反映实际地下水径流量[16]。
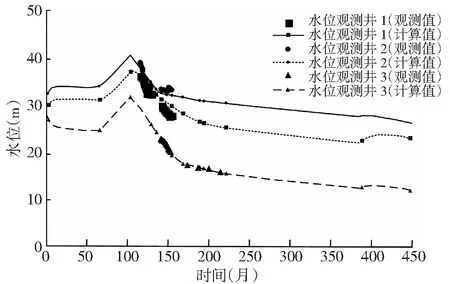
图6 各水位观测点的水位计算值拟合值与观测值曲线Fig.6 Curves of calculated and fitted water level values and observed value of water level at each water level observation point
LNAPL计算值和浓度监测值根据3个观测井的位置差异而发生变化。3个观测井分别位于观测区域的东、南、西3个方向,可以监控每个井中的LNAPL浓度,并进行计算以监控浓度,将观测数据用以评价不同区域的LNAPL浓度,进而评价地下水污染程度,具体的LNAPL计算值和浓度见图7。
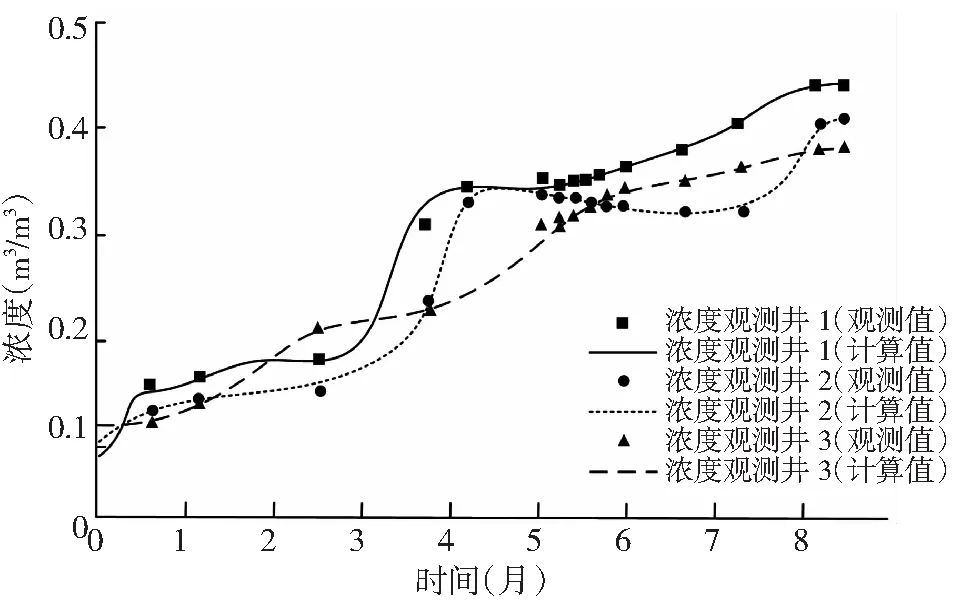
图7 LNAPL浓度监测值和拟合值曲线Fig.7 LNAPL concentration monitoring values and fitting values
图7中溶质运行的路径和渗滤液中LNAPL的运动路径一致,假设从垃圾处理厂源头向监测井渗入的垃圾渗滤液的流量为265mL/min,则有渗滤液LNAPL极限值是0.44m3/m3,由于垃圾处理的效率受人工、环境、处理环境等诸多因素的影响。因此垃圾渗滤液向监测井渗入的时间和持续时间也是不定的,垃圾填埋场面积越大,回收地下水污染的面积就越大,观测值和计算值拟合效果良好,表明建立的溶质运移模型可以较好地测量污染物分布。
2.2 风险监测结果与讨论
根据LNAPL浓度的不同,将垃圾处理场所的污染等级进行分类,并根据三个监测井的位置,对地形对LNAPL浓度的影响进行划分。将地下水固体含量运动模型用于测量垃圾填埋场的三个水井中LNAPL含量,测得的LNAPL浓度见图8。结果表明,1号监测井受地下水径流量以及流速的影响,存在较严重污染,随着时间的后退,LNAPL浓度也不断增加,并在第5个月突破0.4m3/m3,并预计在9个月后达到0.6m3/m3,随着时间的流逝,LNAPL浓度甚至可能更高,由此可见,1号井的污染指数为高;2号井的LNAPL浓度在6个月之后,始终在0.2m3/m3上下浮动,因此2号井的污染水平为中;3号监控井中未测得LNAPL,表明该垃圾处理场几乎未对生态造成污染,LNAPL浓度始终处在0.05m3/m3以下,并且长期保持稳定状态。在回顾了相关文献之后,测量结果与该地垃圾处理场地下水污染研究的相应结论相吻合,表明本文建立的评价地下水污染风险的方法是科学合理的。
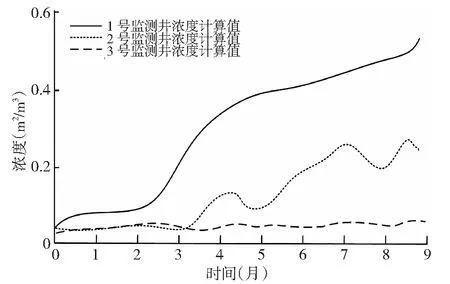
图8 监测井LNAPL浓度计算值Fig.8 Calculated values of LNAPL concentration in monitoring wells
根据最终的结果可以得知,针对北天堂简易垃圾填埋场的地下水资源污染情况的监测,在各个观测井中的监测结果都较为清晰。此外从探地雷达对各个观测井的情况来看,观测井位置的差异也是导致地下水污染物差异的因素。因此可以得知垃圾处理厂地下水中的LNAPL污染物浓度在不同的位置是存在差异的,并且随着时间的推移,不同观测点的LNAPL污染物浓度也会呈现不同的变化趋势。
3 结 论
3.1 LNAPL浓度监测效果较好
研究中提出的探地雷达方法来进行北天堂简易垃圾填埋场的地下水资源污染的实施监测效果较好,可以从结果中看出,3个观测井的地下水水位观测值和计算值具有较好的拟合。同时还能够观测到渗滤液LNAPL极限值是0.44m3/m3,通过长时间的监测,将观测值和计算值相比较,也能看出拟合度较高。因此可以得出相关结论,研究提出的基于探地雷达的垃圾处理厂地下水中LNAPL监测体系效果较好。
3.2 能实现清晰的风险评估
分析风险监测评价结果,显示的3个观测井的浓度变化趋势较为明显,其中1号观测井浓度持续上涨,并在风险预测中表示在9个月之后会达到0.6m3/m3;而3号观测井的污染程度最低,长期监测结果中显示变化甚微,并且预测结果也表明该观测井会长期处于较低的污染浓度。根据风险监测的结果可以看出,探地雷达法在风险监测中依然能够表现出较强的作用,对于各观测井的LNAPL浓度变化趋势可以进行精确的计算,有利于针对性地对各区域的地下水资源进行保护。
3.3 总结
由于地下水存在环境特殊性、流量慢、蚀变少等特点,污染后难以恢复。在明确研究区域垃圾处理场的水文地质条件基础上,以该地域的垃圾处理场的地下水污染为研究对象,探讨探地雷达法用来评估垃圾处理场所地下水污染风险的实际效果。通过研究中的实地测试结果显示,结果与研究区域垃圾处理场地下水污染的有关研究结论相符,也从侧面证明了本文方案的有效性。并且从风险评价中也可以看出,研究提出的监测方法具有较好的预测能力,能够直观的对区域的地下水污染变化进行预测分析,也进一步的增加了地下水保护力度。在这项研究中提出的地下水污染监测方法来评价污染的可行性仍然需要其他验证,如通过使用此方法监测更多的地下水污染,并测试其准确性。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
环境卫生工程(2021年5期)2021-11-20
小资CHIC!ELEGANCE(2021年25期)2021-07-29
科技研究·理论版(2021年20期)2021-04-20
雷达学报(2021年1期)2021-03-04
湖北农机化(2020年4期)2020-07-24
皮革制作与环保科技(2020年13期)2020-03-17
小学科学(学生版)(2019年10期)2019-11-16
雷达学报(2017年6期)2017-03-26
少儿科学周刊·儿童版(2015年7期)2015-11-24