
基于Sentinel-3A SRAL 2级产品的鄱阳湖水位评估与校准
2022-08-25 07:34王文种刘九夫张建云
水利水运工程学报 2022年4期
黄 对,王文种,刘九夫, ,张建云,崔 巍,韦 丽,闵 敏
(1. 南京水利科学研究院 水文水资源与水利工程科学国家重点实验室,江苏 南京 210029; 2. 水利部南京水利水文自动化研究所,江苏 南京 210012; 3. 江西省水文监测中心,江西 南昌 330002; 4. 青海省水文水资源测报中心,青海 西宁 810000)
卫星雷达测高技术获得的水位可用于河湖水位变化、湖泊水量、河川径流量估算、水文/水力学模型校准与同化等研究。测高卫星为过境轨道所观测水体提供监测点,不同卫星的时、空分辨率差异大,有效的过境轨道与监测点取决于传感器特性与水域大小。测高卫星最初设计用于海洋,观测点足迹大小为数千米,自1973年起共计发射约20颗雷达高度计卫星[1]。Sentinel-3(2016—)上携带的高分辨率合成孔径雷达高度计(Synthetic Aperture Radar Altimeter,SRAL)重访周期和足迹分别为27 d和0.3 km,在水位监测上具有优势。
研究人员在利用测高卫星评估分析河湖水位监测方面作了大量研究工作。姜卫平等[2]利用ENVISAT SGDR数据监测青海湖水位,发现冬季测高数据稀少且精度受湖冰粒影响。Zhang等[3]基于2003—2009年ICESat卫星数据分析了青藏高原上261个湖泊的水位变化,其中150个湖泊无过境数据,74个湖泊有超过4年数据但大多每年只有2期。Song等[4]通过调整CryoSat-2数据与实测值的偏移量评估数据的准确性,与实测数据对比,纳木错和羊卓雍措的平均绝对误差为−0.12和−0.17 m,均方根误差为−0.18和0.28 m。赵云等[5]基于CryoSat-2/SIRAL和ENVISAT/RA-2 GDR获取水位数据,分析去除与实测数据的系统偏差后的数据精度,其最小均方根误差和最大相关系数分别为0.093 m和0.956。Maillard等[6]对比巴西圣弗朗西斯科河多个站点水位与过境Envisat/RA-2、SARAL/Altika数据精度,发现不同站点的卫星数据精度相差较大,并分析了河流环境、形状对卫星数据的影响。王红等[7]基于Jason_2卫星分析了长江中游水位月、季变化,测高卫星序列与监测水位的相关系数为0.93。黎鹏等[8]建立ICESat-1和CryoSat-2卫星数据的异常值移除方法,利用相关系数(R)与显著性值(P)评价表明洞庭湖卫星测高水位与实测水位有极显著的相关性,但ICESat-1只能反映年际变化,CryoSat-2能较好反映季节波动和年际变化。
目前,Sentinel-3 SRAL卫星数据处于质量分析阶段,一些学者对Sentinel-3测高卫星的潜力进行了研究,认为Sentinel-3A 1级重跟踪产品的水位精度并没有明显依赖于河流宽度[9],Sentinel-3A/3B各级产品在赞比亚流域与实测数据的均方根偏差为2.9~32 cm[10],基于重跟踪算法的Sentinel-3A 雷达高度计水位相比Jason_3精度较高[11]。
根据测高卫星的设计原理可知,卫星雷达回波易受河/湖底及岸边地形、河/湖环境、岸边陆地环境、强降水天气等污染,数据可用性与精度易受影响;受限于卫星时间分辨率和足迹点大小,通常用于大型湖泊的年、季水位变化监测。我国很多河湖如内陆吞吐型湖泊的水域和水位时空差异显著,变化的湖泊与环境对卫星测高点提取及有效水位计算提出了更高要求。鄱阳湖为大型吞吐型湖泊,实测资料丰富,探究Sentinel-3测高卫星的湖泊水位监测能力,有助于明确该卫星对水位测量的研究与应用场景。因此,本文以鄱阳湖为研究对象,利用Landsat-8和Sentinel-2光学遥感获取星子水文站附近水域并提取水域Sentinel-3A SRAL测高点,建立卫星观测水位计算方法并结合实测数据进行精度评价,进一步利用与实测数据的偏差进行卫星观测水位校准,为基于该卫星产品的内陆湖泊水位监测及流量、水量变化研究提供参考。
1 研究区域与数据
鄱阳湖为长江中下游重要的通江湖泊,位于江西省北部。湖泊北部狭长、南部宽广,东西长约85 km,南北长约152 km,平均水深8.94 m。湖泊主要依赖赣江、修水、抚河、信江、饶河等五河的地表径流及湖面降水补给,出流由湖口向北注入长江,为过水性、吞吐型和季节性湖泊[12]。受五河入湖水量与长江干流顶托作用,年内水位呈高动态变化,湖泊形态在丰水期(4—9月)、枯水期(10—次年3月)差异悬殊,呈“高水为湖、低水似河”和“洪水一片、枯水一线”的特点。最高水位、最低水位一般出现在7月、1月,年内变幅高达6.95 m[13]。
1.1 实测水位数据
过去常以湖口站水位作为鄱阳湖蓄水状态的代表,但该站易受长江干流水位与流量影响。2010年鄱阳湖第二次科学考察确认星子站水位反映鄱阳湖水域面积和蓄水量的代表性较强,将湖泊区分涨水期(3—6月)、湖泊状态(7—9月)、枯水期(10—次年2月)绘制水位-面积-蓄水量的综合曲线[14]。研究证实星子站水位受五大河流和长江水位影响小[15],又为水利部水利公报所采用站点,因此采用鄱阳湖标志性水文站,即星子站实测水位数据。数据时段为2016年3月—2018年11月,含日均与小时水位,数据质量经过严格控制与检查。
1.2 卫星遥感数据
Landsat-8携带的陆地成像仪OLI(Operational Land Imager)包含可见光及近红外、短波红外波谱,影像的时空分辨率分别为16 d和15 m/30 m,成像质量相比前序Landsat影像更好;数据源自美国地质调查局网站(https://earthexplorer.usgs.gov/)。Sentinel-2系列卫星搭载的多光谱成像仪(MSI)可提供最高 10 m、5 d重返周期的多光谱影像,其中Sentinel-2A含13个光谱波段,时空分辨率分别为10 d、10~60 m;数据源自欧空局共享网站(https://scihub.copernicus.eu)。利用遥感影像处理软件进行辐射校正、正射校正、局部裁剪、几何精校正等处理,依靠光学影像判定湖泊水体位置信息,自动选取地面控制点对影像进行配准,保证像元位置精度控制在0.5个像元内。
Sentinel-3是支持全球环境与安全监测计划(Global Monitoring for Environment and Security,GMES)在海洋、陆地、大气、应急、安全和冰冻圈的应用而开发的地球观测卫星,由欧空局和欧洲气象卫星组织共同运作[16]。Sentinel-3A卫星于2016年2月发射,其上搭载SRAL用于海洋表面水位、潮汐及陆地冰、陆地及内陆水体研究,可获取近实时(数据获取后3 h内)、延迟(数据获取后48 h内)及非时间临界(数据获取后1个月后)3种数据产品。每个产品包含简化测量、标准测量和增强测量数据,标准测量数据包含标准的Ku、C波段参数。Sentinel-3A SRAL重返周期为27 d,测点间距为300 m,轨道经过鄱阳湖的时间为10∶35(升轨)、21∶55(降轨)。本文采用经仪器和地理校正的Sentinel-3A SRAL的L2级陆地数据产品的标准测量数据,该产品基于L1级产品与微波辐射产品生成,波形数据已经过波形重定,数据格式为netCDF,数据同样源自欧空局数据共享网站。
2 研究方法
2.1 基于光学影像湖泊水面的卫星测高点初筛
NDWI[17]、MNDWI[18]为常用的基于光学影像的水体提取方法,是基于水体光谱特征曲线的波段模型。依据模型直方图统计结果尝试确定最优水体分割阈值。已有研究[19]表明以下两种方法获取鄱阳湖水域数据的有效性,具体计算式如下:

式中:G绿为绿光波段反射率,对应OLI 影像、MSI影像的第3波段;N红外代表近红外波段,对应OLI 影像的第5波段、MSI影像的第8波段;M中红外代表中红外波段,以短波红外波段(SWIR)代替,对应OLI 影像第6波段、MSI影像的第11波段。Sentinel-2影像绿波段和短波红外波段分辨率分别为10 、20 m,将10 m的绿波段双三次插值采样至20 m后再进行式(2)运算。通过上述两种方法,对经预处理的Landsat-8和Sentinel-2数据通过选取阈值进行二值化、栅矢转换处理,结合目视解译综合获得最优水体信息。
根据湖泊水面范围筛选获取星子站附近水域Sentinel-3A SRAL卫星测高点的经度、纬度、卫星高度、量程及纠正项等原始数据,丰、枯水期过境轨道测点如图1所示。

图1 基于卫星遥感水面的卫星测高点初筛(红色为升轨轨道、黑色为降轨轨道示意)Fig. 1 Sentinel-3A SRAL water level point selection (red line is ascending orbit, black line is descending orbit)
2.2 基于卫星测高数据的水位计算方法
Sentinel-3 SRAL通过测高仪发射雷达脉冲,然后接收地面反射的雷达波信号。雷达波不可避免地受设备、地形、大气、波浪、电离层等的影响,计算水面高程时需进行纠正[20],基于卫星测高原理的湖泊卫星测高水位计算式为:

式中:hal为卫星测高水位;Aaltitude为卫星至参照椭球面(WGS84)的高度;ROCOG为利用OCOG波形重跟踪算法的卫星至湖泊水位点的高度;Hcor为各项纠正项目;N为参考椭球体与EGM2008大地基准面的高度。式(3)中的Aaltitude、ROCOG分别对应产品20 Hz数据的alt_20_ku、range_ocog_20_ku。式(4)为地球物理修正项,等号右边各项分别对应干对流层延迟、湿对流层延迟、电离层、地球潮汐与极潮项的修正,参数源自于过境轨道1 Hz数据,由于卫星初筛点间的地球物理参数值差异极小,Hcor由初筛点直接计算获得。
受湖-陆地过渡带、湖中小岛/湖滩的影响,卫星雷达高程探测数据常存在偏差,需剔除异常测点。一些学者采用3倍标准差准则[21-22]或将湖泊水位观测值的标准差设定在0.2 m以内进行剔除[23]。为保证所计算测高水位的有效性与水位序列的稳健性,通过自动化程序与交互式检查,建立严格的异常测点剔除方法。同一测次不同测点的剔除与水位计算步骤如下:
(1)从卫星测高原理来看,Aaltitude−ROCOG必须大于0,若Aaltitude−ROCOG≤0,说明成像测点异常,舍弃该测点;结合式(3)、(4)计算初始hal。
(2)研究对象为内陆平原湖泊,已有研究表明鄱阳湖各相距较远的水文测站实测水位间有一定差异,考虑所选水文测站一定水域内的湖泊水位不应有较大波动,同时考虑其会有一定波动,以样本点标准差为0.2 m作为阈值,进行如下判断:①当同一测次样本点的标准差不大于0.2 m,保留同一测次所有样点;②当同一测次样本点的标准差大于0.2 m时,且检验值(xi) 与平均值之间差值的绝对值超过样本的标准差,舍弃该检验值,然后重新生成样本继续判断;若样本点的标准差大于0.2 m,但检验值(xi) 与平均值之间差值的绝对值不大于样本的标准差时,则剔除掉>0.2的样本点,重新生成样本继续判断,直至不存在>0.2的样本点或者样本点的标准差小于0.2 m。
(3)统计经上述迭代处理后的各测次的有效测点数目。
(4)分析各测次卫星过境轨道经过的水域,考虑水域内无江心洲时测高航迹线的连续性、有江心洲时测高航迹线的非连续性,将同一测次测高轨道航迹线分成K段(K≥1),分别统计各测次各线段的用于计算初始hal的测点数目n、有效测点数目neff。进行如下判断:①对于航迹线段K=1的测次,同一测次的有效测点数目不能少于4个;②对于航迹线段K>1的测次,同一测次各线段的有效测点数目应满足如下要求:一是当线段的n<3时,即线段内计算初始hal的测点数目小于3时,该线段无有效测点要求;二是当线段的n为3或4时,该线段至少应有1个有效测点,即neff≥1;三是当线段的n≥5时,该线段至少应有2个有效测点,即neff≥2;在此基础上满足同一测次总有效测点数目neff≥4个的测次保留。
(5)计算符合判断标准后的同一测次所有样本点的均值作为该测次水位hal。
2.3 卫星观测水位校准与评估方法
Sentinel-3 SRAL卫星测高数据与实测水位数据的高程参考系统不一致(二者分别为EGM2008水准面、吴淞高程基准),考虑高程系统转换可能引入局部垂直误差,首先分析卫星观测水位与实测水位的时间趋势一致性,再分析卫星观测水位变化量与实测水位变化量的关系,以消除高程系统误差;通过去除实测水位与卫星观测值之间的平均偏差,进行卫星观测水位校准。所用统计指标为:皮尔逊相关系数(R)用于分析时间趋势一致性,平均偏差(dMBE)、平均绝对偏差(dMAE)用于表示卫星观测水位/水位变化量与实测水位/水位变化量误差;均方根误差(dRMSE) 表示卫星观测水位/水位变化与实测水位/水位变化的总体偏差;标准差(dSTDEVA)表示卫星观测水位变化量的离散程度。
采用卫星观测水位与实测水位的平均偏差作为校准参数,按2016—2017年、2017—2018年、2016—2018年分别计算卫星升轨、降轨的平均偏差,以此作为升、降轨时水位的校准参数。将不同过境时间的卫星观测水位加上校准参数,即获得考虑系统偏差后的卫星校准水位hal校。其中平均偏差可视为该湖泊的常规校准参数,计算式为:

3 结果与分析
3.1 实测水位变化分析
鄱阳湖星子站日均水位和月均水位过程见图2。2016—2018年日均最高水位均出现在7月,最低水位分别出现在12月、2月、1月;水位年内变化幅度大,2017年变幅为10.79 m,月均水位总体表现为逐年降低,2017年均值较2016年下降0.89 m,2018年均值较2017年下降1.13 m。水位实测资料以日均水位形式发布,卫星观测为特定时刻,分析该站的日均水位与卫星过境时刻的时均水位(分别为白天10—11时、晚上22时)。日均水位与白天、晚上时均水位的平均偏差为−0.012 和−0.017 m,最大误差为0.20 和0.24 m,出现于2017年7月,与汛期时刻水位变化大的规律符合。总体上同一天内白天与夜晚的水位差在0~0.02 m。

图2 星子站水位变化Fig. 2 Water level change in Xingzi Station of Poyang Lake
3.2 卫星观测水位评估与校准
3.2.1 有效数据评估 经数据剔除后的有效测次与测点统计见图3。Sentinel-3A SRAL白天与晚上的有效测次为49期,占总过境测次的64%,其中白天、晚上的有效测次分别占各过境总测次的65%、62%。有效测次的测点为5~23个,5~8个测点的测次占44%,丰水期有效测点数总体高于枯水期。评估结果表明,Sentinel-3A SRAL卫星测高数据连续覆盖鄱阳湖3—9月,在12月至次年2月无有效覆盖数据。已有研究表明:卫星雷达回波易受浅水与环境污染[8],如沙洲、建筑物、船只影响[9],结合光学影像看,枯水期星子站附近湖滩露出多,影响过境数据的有效性;同一测次两个有效测点间存在异常测点,可能与浅水湖底地形、湖面船只有关。

图3 有效测次的有效测点数目Fig. 3 Observation points used for each satellite observation
3.2.2 卫星观测水位精度评估 由图4可知:2016—2018年间湖泊卫星观测水位呈下降趋势,与实测水位变化趋势一致,实测水位与卫星观测水位的平均偏差为1.802 m;二者散点的皮尔逊相关系数为0.999,p≤0.001(p为显著性水平)。其中在升轨、降轨的平均偏差分别为1.794、1.811 m,相关系数分别为0.999、0.996;在丰水期、枯水期的平均偏差为1.852、1.786 m,相关系数分别为0.999、1.000。这表明具有不同高程系统的卫星测高水位与实测水位的时间序列有极强的一致性。

图4 实测水位与卫星观测水位对比Fig. 4 Comparison of measured and sentinel-3A SRAL water level
进一步分析不同情形下卫星观测水位变化量与实测水位变化量的一致性。以过境首期水位作为初始水位,利用其他期水位分别减去首期水位获取水位变化量,同时分别考虑升轨与降轨、丰水期与枯水期各自首期水位,同理计算水位变化量。由图5可知,实测水位变化量与卫星观测水位变化量的相关系数为1,二者平均偏差为−0.175 m,标准差为0.084 m。从不同过境轨道来看,升轨、降轨卫星观测水位变化量与实测水位变化量的R值都为1.000,平均偏差为−0.191、−0.096 m,均方根误差为0.203、0.135 m,升轨的平均偏差与均方根误差值均高于降轨。从丰、枯水期来看(表1),丰水期指标值均高于枯水期,其中降轨枯水期卫星测高水位与实测值的统计指标最小:平均偏差为−0.082 m,均方根误差为0.107 m,标准差为0.076 m。结合已有关于均方根误差在30 cm以下为良好[24]及R值大于0.900[10]的判断标准,认为鄱阳湖卫星测高水位的精度较高。

表1 不同情形下卫星观测水位变化量与实测水位变化量的统计指标Tab. 1 Comparison of results of water level change between satellite radar altimetry and in situ data

图5 实测水位变化量与卫星观测水位变化量对比Fig. 5 Comparison of water level changes from in situ data and sentinel-3A SRAL
上述间接精度评估中,R最小值为0.996,dRMSE为0.107~0.215 m,dMBE为−0.082~−0.204 m,与以往其他卫星与实测对比较好的研究结果[4-5,8]相比,该评估精度较高;与基于Sentinel-3评估结果相比(如在中国平原河流最优dRMSE为0.120~0.900 m[9],在赞比亚流域为0.029~0.320 m,在我国滨海湿地最小为0.240 m,dMAE最小为0.180 m[11]),本研究所获的Sentinel-3A SRAL水位监测的精度较高;与常规季、年变化监测比,Sentinel-3A能连续有效覆盖湖泊丰水期各月。
3.2.3 偏差校准评估 计算得到2016—2017年、2017—2018年、2016—2018年卫星观测水位与实测水位的平均偏差为1.802、1.799、1.801 m,以此作为校准参数后的卫星校准水位与实测水位的平均绝对偏差都为0.073 m,相关系数为1.000。不同校准参数下的平均绝对偏差差异较小(见表2),以2016—2018年校准参数下的校准结果为例,平均绝对偏差为0~0.184 m,其中0.05 m以下占33%,0.1 m以下占74%,0.15 m以下占92%,大于0.15 m占8%,校准水位与实测水位时间序列一致性强(图6)。可见,不同校准参数下的校准结果差别小,经数据剔除规则后的卫星观测数据的稳定性较强,校准后的卫星水位数据精度高。

表2 不同校准参数下的平均绝对偏差统计Tab. 2 Mean absolute deviation statistics under different calibration parameters
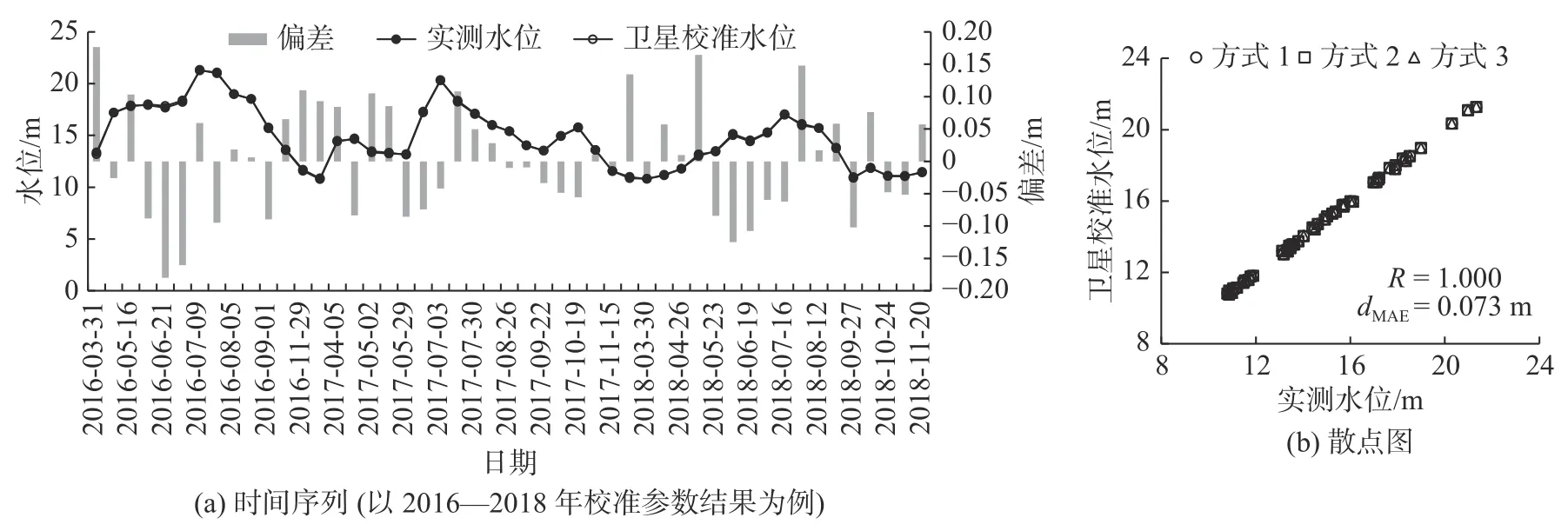
图6 Sentinel-3A卫星校准水位与实测水位对比Fig. 6 Comparison of Sentinel-3A calibrated water level and measured water level
4 结 语
基于Sentinel-3A SRAL 2级产品数据与Landsat-8和Sentinel-2光学影像,以水域与水位具有显著季节变化的鄱阳湖为研究对象,建立卫星观测水位计算方法获取2016—2018年卫星观测水位序列,结合实测水位分析精度并进行校准,得出主要结论如下:
(1)Sentinel-3A SRAL卫星测高数据在鄱阳湖的数据有效性为64%,有效过境数据覆盖3—9月,12月至次年2月无有效覆盖数据;结合卫星影像的湖泊水域看,枯水期星子站附近湖滩露出较多,影响过境数据的有效性。
(2)不同高程系统下的卫星测高水位与实测水位的时间变化趋势的一致性强,相关系数为0.999,P≤0.001;实测水位变化量与卫星观测水位变化量的相关系数为1.000,二者平均偏差为−0.175 m,标准差为0.084 m,其中升轨、降轨的平均偏差为−0.191、−0.096 m,均方根误差为0.203、0.135 m,降轨统计指标值优于升轨,枯水期优于丰水期,降轨枯水期的统计指标最小:平均偏差为−0.082 m,均方根误差为0.107 m,标准差为0.076 m。
(3)以2016—2017年、2017—2018年、2016—2018年卫星观测水位与实测水位的平均偏差为校准参数后的卫星校准水位与实测水位的平均绝对偏差都为0.073 m,相关系数为1.000。不同校准参数下的平均绝对偏差差异极小,校准后的卫星水位数据精度高。
Sentinel-3 SRAL为内陆水域水位监测与相关应用研究提供了一种新的数据源,由于卫星测高数据受测高轨道、天气、湖泊环境与水面状况等多因素的影响,研究中需尽量考虑并剔除相关因素影响,同时还需结合湖泊特性进行卫星测高数据的有效性与质量评估,Sentinel-3A/3B双星配置在空间、时间分辨率上极具优势,后续将开展二者结合及与其他多源卫星数据产品的对比评估。
猜你喜欢
制造技术与机床(2022年2期)2022-02-22
汽车实用技术(2021年10期)2021-06-04
现代装饰(2020年10期)2020-10-28
天津城建大学学报(2020年4期)2020-09-10
小学阅读指南·低年级版(2017年2期)2017-03-23
北京航空航天大学学报(2014年11期)2014-12-02
中学生数理化·七年级数学人教版(2008年10期)2008-01-21
