永磁同步电机全速域无传感器控制
2022-08-25 14:16:42桂永麟于新红
微特电机 2022年8期
桂永麟,于新红
(中国科学院海西研究院 泉州装备制造研究中心,现代电机控制与电力电子实验室,泉州 362200)
0 引 言
永磁同步电机(以下简称PMSM)具有效率高、调速范围大、功率密度高等优点[1],在工业上受到广泛关注。基于无传感器PMSM驱动系统无需位置传感器,具有低成本、高可靠性和无安装空间等优点,可进一步提升电机驱动系统的紧凑性及功率密度。然而,无传感器驱动系统还无法满足高精度高动态响应速度的应用场合和要求[2-4],其综合性能还有待进一步提升。为了解决上述问题,越来越多的学者对PMSM全速域无传感器控制技术进行了深入研究。
低速域高频注入闭环控制的传统算法主要包括高频电流信号注入法和高频电压信号注入法,其主要区别在于注入高频信号的不同以及注入方式的区别[5-8]。高频电流信号注入法通过注入高频电流信号,通过高频响应电压得到转子位置信息,该方法受限于PI参数的准确性[5]。在高频电压信号注入法中,高频旋转电压注入法利用注入旋转的高频电压信号,对负序电流中的转子位置信息进行提取,虽然算法较为通用简单,但难点在于高精度的电流采集,同时大量滤波器的使用降低了系统动态性能[6]。而高频脉振注入法利用电感磁饱和效应(饱和凸极效应)产生的交、直轴电感不等现象,提取交轴电流中的转子位置信息,然而此类方法同样具有动态性能差、系统带宽降低等问题。针对此类滤波器的大量使用所带来的问题,常用注入高频方波电压的方法来解决。该方法通过注入开关频率等级的高频方波电压,从交轴上的高频响应电流中提取有效信息,再直接通过对相邻采样电流作差获取高频响应电流的包络信号,从而避免了提取转子位置时对滤波器的使用[7]。
中高速阶段常采用基于基波数学模型的位置估计算法,包括模型参考自适应法[8]、扩展卡尔曼滤波[9-11]、滑模观测器[12]等。其中模型参考自适应法通过模型自适应机制,将可调模型收敛跟踪至参考模型,然而此类方法对参数依赖性强,并且对反馈系统的依赖性有一定要求。扩展卡尔曼滤波法通过最优线性估计的策略,对增益矩阵进行设计,虽然不依赖电机本体参数,但算法复杂、计算量大,实时性要求高。相较于这些算法,滑模观测器(以下简称SMO)具有运算量小、鲁棒性强等特点,被广泛应用,该方法通过构造滑模面,根据误差信号调整输入从而实现转子角度的稳定跟踪。
本文提出一种全速域高性能PMSM 无位置传感器控制策略,针对上述问题,低速域采用改进型正交方波电压信号注入位置估计方法,在减少滤波器使用的基础上降低了直流偏置带来的影响。中高速域提出基于扩展电动势模型的高阶SMO方法实现算法简单、鲁棒性高的无传感器控制策略。并通过滞环平滑切换策略,保证在多工况下对于位置、速度的闭环稳定控制。
1 全速域混合位置估计策略
1.1 改进型α,β轴方波注入位置估计方法
在d,q旋转坐标系中,PMSM的数学模型如下:
(1)
式中:ud和uq分别为d,q坐标轴下的电压;id,iq分别为d,q坐标轴下的电流;Rs为定子电阻;ψf为永磁体磁链;ωe为电角速度;Ld,Lq分别是d,q坐标轴下的定子电感参数;p为微分算子。
根据电压电感的特性,在高频电压信号频率远大于基波电压频率的情况下, PMSM 数学模型可等效为电感负载,式(1)可简化:
(2)
将平均电感、差分电感分别定义为∑L=(Ld+Lq)/2,ΔL=(Ld-Lq)/2。将式(2)变换至α-β静止坐标系,可得高频注入信号下电机模型:
(3)
式中:iαh,iβh为高频响应电流分量;θ为实际转子位置角度。
注入的高频电压信号vαh和vβh如下:
(4)
式中:n=1,2,3,4,…。
为了从电流中提取出转子位置信号,需要对电流信号进行解调。为了方便表达,首先定义:
(5)
将式(5)代入式(4)得:
当t=nT时
(6)
当t=T/4+nT时
(7)
当t=2/T+nT时
(8)
当t=3/4T+nT时
(9)
由上式可知,与传统的高频注入法相比,高频分量可由方波特性通过电流信号解调得出,避免了滤波器的使用,提升了系统动态性能;同时新型方波的设计,替代了常规解调中转子位置信息与电机的参数的相关性。最后转子位置信息由反正切函数直接得出,解决了传统方法中锁相环处理信号带来的带宽增加问题。
1.2 高阶SMO位置估计方法
静止坐标系下包含转子空间信息的PMSM状态空间方程可写成下式:
(10)
式中:ωe为电角速度;Ld,Lq为定子电感;[uαuβ]T,[iαiβ]T为定子电压、定子电流;凸极反电动势可定义:
(11)
(12)
根据式(11)和式(12),将电流和扩展电动势转化为状态变量的高阶状态方程:
(13)

A11=-R/Ld·I+ωe(Ld-Lq)/Ld·J;
A12=-1/Ld·I;A22=ωe·J;B1=1/Ld·I;
在传统方法中,根据滑模控制函数提取转子位置时,常在二阶SMO中假定电动势导数项为零,因此系统的动态响应性能有限。为了提高系统鲁棒性,增加对反电动势的观测项。基于式(13),高阶SMO可描述:

(14)
式中:l1、l2、m1、m2为参数增益;
将式(14)减去式(13),扩展电动势的误差动态可表示
(15)
1.3 高阶SMO稳定性分析
为了分析高阶SMO的收敛性,选择Lyapunov函数作为参数:
别呦呦把手伸到我腋窝,我怕痒,醒了。一睁眼,天早亮了,不知从哪传来几声鸟叫,有团雾从我眼前飘过,我伸手抓,抓住了,又让它溜走了。
(16)
对其求导可得:

(17)
为保证系统收敛且提升SMO对干扰和参数突变的鲁棒性,应满足:
(18)
基于此,由对微分转子位置的估计值,可计算估计速度ωe。通过低通滤波器对估计速度进行滤波,以减少干扰的影响。通过适当设计m1和m2,估计的扩展电动势可以近似地收敛到真实电动势。因此,扩展电动势误差可看作为时不变系统,当速度收敛时,反电动势也收敛至实际值,在降低抖振的同时,进一步增强了系统的鲁棒性。
1.4 滞环平滑切换策略
常规切换方法以加权算法控制策略为主,通过设计权重,并按照线性组合的方式,过渡阶段由两种方法加权决定。由于两种方法位置估计的理论方法、抗干扰能力及转速估计稳态误差存在差别,当算法出现切换区间过窄或工况复杂导致转速大幅度振荡的情况时,转速会在切换区间对两种速域的方法进行反复切换,增加系统的运算量,甚至导致系统控制失效。因此本文采用滞环平滑切换策略,保证整体算法在低速域与高速域之间平稳切换。如图1所示,其中切换所采用的过渡策略表达式:
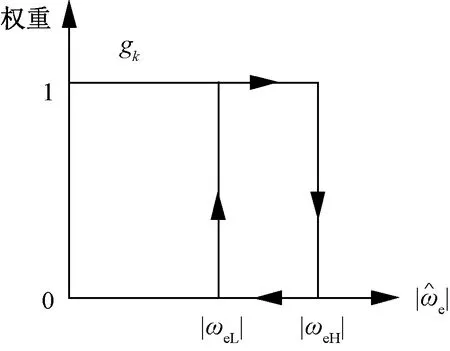
图1 滞环函数
(19)
2 仿真及结果分析
为验证全速域混合位置估计策略的有效性及可行性,在MATLAB/Simulink中对算法进行仿真验证,PMSM仿真参数如表 1 所示。
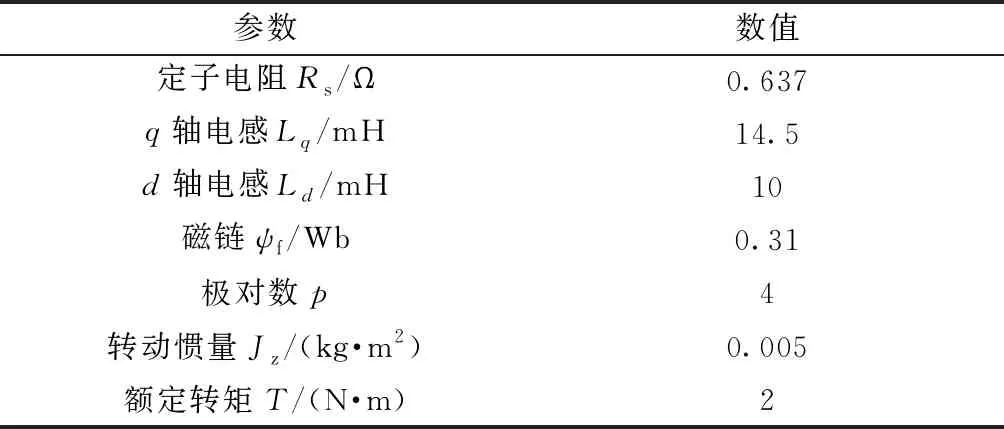
表1 PMSM参数
图2为低速域改进型高频注入策略与常规高频注入策略对比。高频方波信号设置幅值Vh=50 V,频率为8 kHz,初始转速参考值为100 r/min,在0.5 s时,转速增至200 r/min;在1 s时,负载由空载增至15 N·m。图2(a)为实际、新型高频注入与常规高频注入转速变化曲线,图2(b)为转速误差变化曲线,图2(c)为转子位置与估计转子位置变化曲线。由仿真结果可知,新型高频注入法相较于传统高频注入法,具有更快的响应速度和系统鲁棒性。系统稳定时,转速误差小,在突增转速和负载的情况下,转速与位置信息都能在较短的时间内收敛至给定值。
图3为高速域高阶滑模策略与常规滑模策略对比。其中,滑模增益l1=l2=40,m1=m2=900,初始转速参考设置为1 000 r/min,在0.5 s时,转速增至1 500 r/min,在1 s时,负载由空载增至15 N·m。图3(a)为实际、新型高频注入与常规高频注入转速变化曲线,图3(b)为转速误差变化曲线,图3(c)为转子位置与估计转子位置变化曲线。在电机平稳运行时,转速抖振更小,这是由于高阶SMO等效控制后得到的是反电动势实际值与误差值之间的观测量,而不是传统滑模中反电动势的估计值,取代了通过反电动势数值计算得到转子速度的观测方式,实验结果与前文分析一致,避免了滑模抖动对转子位置估计量的直接影响。
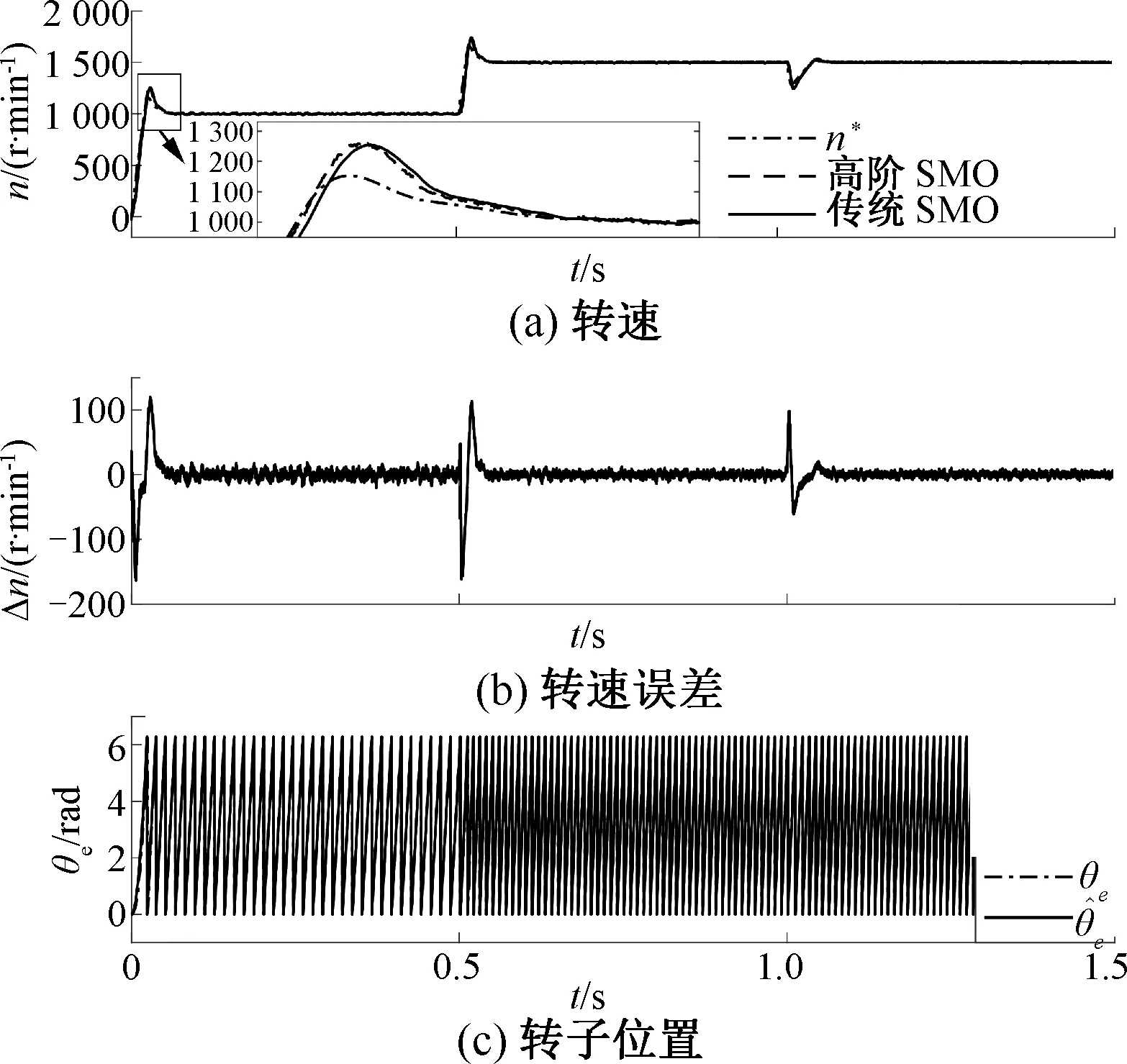
图3 高速域高阶滑模策略对比
图4为全速域无位置传感器控制策略。在0.5 s时,转速由200 r/min增至1 500 r/min,在1 s时,负载由5 N·m突增至15 N·m ,转速切换区间设置为ωeL=400 r/min至ωeH=600 r/min。低速域高频注入单独控制时,稳态误差在2 r/min内,转速突增后,转速通过滞环切换策略在600 r/min转时切换为高速域高阶滑模控制,切换过程平滑稳定,同时转速静态误差控制在1.2 r/min内,1 s突增负载后,转速依然能快速收敛,体现了算法的可行性
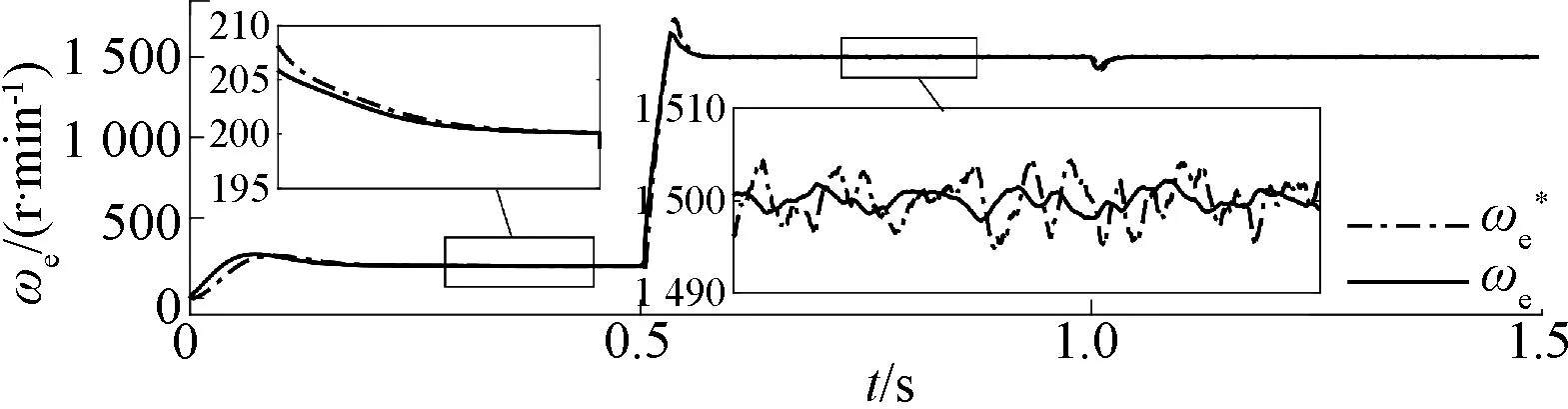
图4 全速域无位置传感器控制策略
3 实验结果
本文采用如图5所示的实验平台对PMSM全速域无传感器控制策略进行验证。选取4.8 kW内置式PMSM。其中,采用的主控制器为TMS320F28379D,基于依靠MATLAB设计的GUI控制界面完成应用层的实现,驱动算法控制系统在DSP中实现算法控制,控制频率为16 kHz。系统结构框图如图6所示。
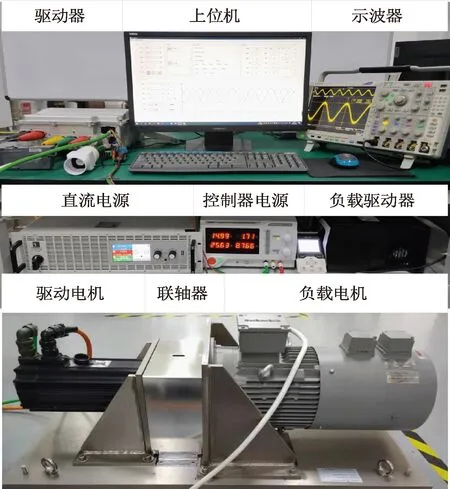
图5 电机对拖实验平台

图6 系统结构框图
为测试本算法实验动态及稳态效果,0.6 s时电机由低速域切换至高速域,给定转速由150 r/min增加至1 750 r/min,切换初期由于给定转速大幅度变化,低速域高频注入法出现轻微抖动,通过滞环切换策略,进入高速域时转速逐渐平稳;0.8 s时突增负载10 N,0.15 s内转速稳定;1 s时高速域切换至低速域,给定转速由1 750 r/min降低至150 r/min,高阶滑模控制策略在大幅度转速切换下出现一定抖动与超调,0.8 s后进入低速域电机平稳运行;1.2 s时减载10 N·m,短暂超调后0.08 s内转速稳定。整个阶段转速跟踪良好,稳态时角度误差稳定在0.1°内,验证了算法的可行性。
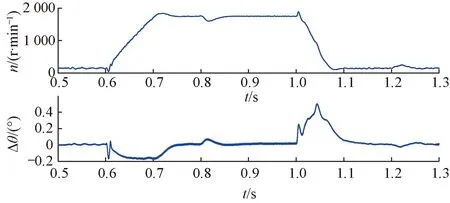
图7 全速域多工况实验
4 结 语
在中高速域,本文采用基于扩展滑模观测器的原理,在不依赖电机本体参数的情况下,在降低滑模抖振的同时,对转速进行了快速稳定的跟踪控制。在零低速域,采用基于高频正交改进型方波注入的转子位置辨识法。通过重构电流信号,利用相邻区间内四种高频响应电流差值,通过数学运算消去高频正余弦信号中的直流分量。相较于传统高频注入法,改进后的高频注入法减少了滤波器的使用和直流偏置带来的影响,对系统带宽和位置估计精度进行改善。在不同速域使用滞环控制策略实现平滑切换。仿真及实验结果验证了本文的PMSM全速域无位置传感器控制策略的可靠性和有效性。
猜你喜欢
数学物理学报(2021年1期)2021-03-29 03:13:48
数学物理学报(2020年6期)2021-01-14 01:00:36
哈尔滨轴承(2020年1期)2020-11-03 09:16:02
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
电镀与环保(2016年3期)2017-01-20 08:15:29
天津师范大学学报(自然科学版)(2015年2期)2015-03-11 18:46:50
深圳大学学报(理工版)(2015年5期)2015-02-28 16:21:22
实验技术与管理(2014年9期)2014-03-11 18:37:38