自动驾驶车辆晕动症研究综述*
2022-08-24 10:41:40高振海金励辛高菲赵睿张天瑶
汽车技术 2022年8期
高振海 金励辛 高菲 赵睿 张天瑶
(吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
主题词:自动驾驶 晕动症 感觉冲突 客观测量 运动算法优化
1 前言
晕动症(Motion Sickness,MS)是一种常见病症,在医学上表示人体暴露在刺激性的运动环境中时,出现面部苍白、出冷汗、胃部不适、头晕、恶心以及呕吐等反应。晕动症持续时间为几分钟至数小时,通常不会对人体造成严重的健康危害,但症状严重时可能出现由感觉系统或中枢神经系统功能障碍引起的平衡器官衰竭、脱水以及矿物质平衡紊乱等现象。
车辆乘员晕动症问题由来已久,Turner 和Griffin通过使3 256名乘客乘坐由不同驾驶员在不同路线上驾驶的56 辆公交车,对乘客的个体特征、外部视野、乘车活动、乘坐规律以及使用抗晕动症药物的影响进行调查,结果表明,在乘车时,有28.4%的乘客感到不适,12.8%的乘客感到恶心,1.7%的乘客呕吐。
随着车辆智能化研究的深入,研究者发现自动驾驶车辆中晕动症的发生率和严重程度进一步增加。Sivak和Schoette在美国、中国、印度、日本、英国和澳大利亚针对成年人在乘坐自动驾驶汽车时参与的活动进行调查,并分析乘客参与的活动对晕动症发生率和严重程度的影响。结果显示,晕动现象多发生在行驶过程中看书或盯着小屏幕时,超过40.25%的乘客在乘坐自动驾驶车辆时会进行阅读、发信息、看电视、工作、玩游戏等不观察道路条件的活动。其中有14%的乘客经常经历晕动症,17%的乘客会经历中度或严重的晕动症,与传统车辆相比,晕动症的发生率增加了17.24%。
乘客评判自动驾驶出行服务优劣的标准除了安全到达目的地外,最重要的是乘坐舒适性。因此,自动驾驶车辆晕动症的研究对于自动驾驶出行服务的普及与服务水平的提升具有重要意义。
本文介绍自动驾驶车辆晕动症的发生机理和测量方法,并从感觉线索获取和运动算法优化2个方面讨论其减缓方法,最后提出现有研究的不足,并对自动驾驶车辆晕动症研究的未来方向进行展望。
2 自动驾驶车辆晕动症发生机理
2.1 晕动症发生机理
国内外研究者提出了若干学说来解释晕动症的发生机理。中枢神经递质功能失调假说认为,乙酰胆碱、组胺、5-羟色胺以及去甲肾上腺素等中枢神经递质出现功能失衡导致晕动症的发生。耳石不对称假说认为,位于耳石内的位觉砂由于机体两侧的耳石出现功能不对称而发生质量变化引发晕动症。基因遗传假说认为,α2-肾上腺素能受体的单核苷酸多态性导致了不同个体对刺激性运动产生差异性自主反应。内分泌功能异常假说认为,机体产生晕动症往往与应激反应有关,而应激反应通常会引发内分泌系统内物质的变化,如生长激素、血管活性肠肽、皮质醇及精氨酸加压素等。
感觉冲突假说被广泛接受。早期,Held通过试验研究证明了机体的主动运动在晕动症过程中的重要性,为晕动症发生机理模型提出了一个假想的结构元件,称为“相关存储器”,用来保留中枢神经系统控制身体运动时发出的控制指令与身体执行指令后感觉系统感知到的感觉信息之间的组合痕迹,并提出“感官重排”这一概念,用来描述一个或多个感觉器官感知到的感觉信息被系统地扭曲的运动情境。
在此基础上,Reason提出了感觉冲突假说,将晕动症定义为人体各种感觉器官感知到的信息不一致导致机体不协调而引发的运动反应。当机体受到异常的运动刺激时,其前庭系统、视觉系统与本体感受器感知到的运动信息互相矛盾,引起半规管感知到的旋转加速度和耳石感知到的线性平移加速度(包括重力)之间的前庭内冲突,冲突持续时间足够长并且强度足够大,就会导致晕动症的发生。
经过进一步的研究与完善,感觉冲突假说发展为除了感觉系统感知的运动信息相互矛盾,视觉、动觉以及位置觉等实际传入的感觉信息和人体根据以往经验所预期的感觉信息之间的差异也会引发感觉冲突,模型结构如图1 所示。人脑中存在“神经存储器”用来储存以往的运动经验,人体在主动运动或被动运动时,将眼睛和前庭器官等传入的感觉信息与神经存储器中的经验信息进行对比,二者之间的差异即为引发晕动的感觉冲突。同时,感觉冲突信号也被反馈给神经存储器,用于更新经验信息,以帮助人体适应当前的运动刺激。人体自主控制运动时,神经存储器中的经验信息与传入的感觉信息将更快地匹配,产生的刺激或冲突较小。

图1 感觉冲突假说定性模型
通过引入控制理论的思想,Oman对Reason提出的感觉冲突假说进行了细化,模型结构如图2所示。将人体视为控制系统,其中大脑与肌肉等控制身体各部分的运动,眼睛和前庭器官等感知身体运动状态,同时人脑中存在身体各部分的经验模型,即“内部模型”,用于估计身体运动状态。实际感知的感觉传入与内部模型估计的感觉传入之间的差异即为引发晕动的感觉冲突。感觉冲突反馈至内部模型,以提高运动估计精度。人体自主控制运动时,内部模型将模拟控制指令下的预期运动,对未来的感觉传入进行额外的预测,更快地减小感觉冲突。当外力引起的运动扰动使冲突无法消除时,晕动症严重程度就会加剧。

图2 基于内部模型假设的感觉冲突假说定性模型
Oman和Cullen在人体大脑中发现了与感觉冲突假说中的元件相对应的区域,验证了假说的有效性。与存储以往经验的“内部模型”相对应的是具有记忆存储功能的海马体和前庭皮质区域,与感觉冲突神经元相对应的是接收各种传入感觉信息的前庭核和小脑神经元。
Bles 和Bos 等人在感觉冲突假说的基础上提出了更为简化的主观垂直冲突(Subjective Vertical Conflict,SVC)假说,将感觉冲突简化为主观(或内部模型预测)的垂直或重力方向与实际感知到的垂直或重力方向之间的差异,简化后的结构模型如图3 所示。其中,LP 为将重力加速度与其他加速度分离的低通滤波器。SVC假说认为,以往经验中重力加速度的大小和方向是不变的,人体倾向于通过重力加速度来判断姿态的变化,实际感知的重力加速度与预期的重力加速度之间的差异即为引发晕动的感觉冲突。SVC假说还认为,内部模型不仅在人体自主控制运动时能预测感觉传入,当人体被动运动时,若能根据视觉、听觉等感觉信息预测运动,内部模型也能被激活,对感觉传入进行预测。
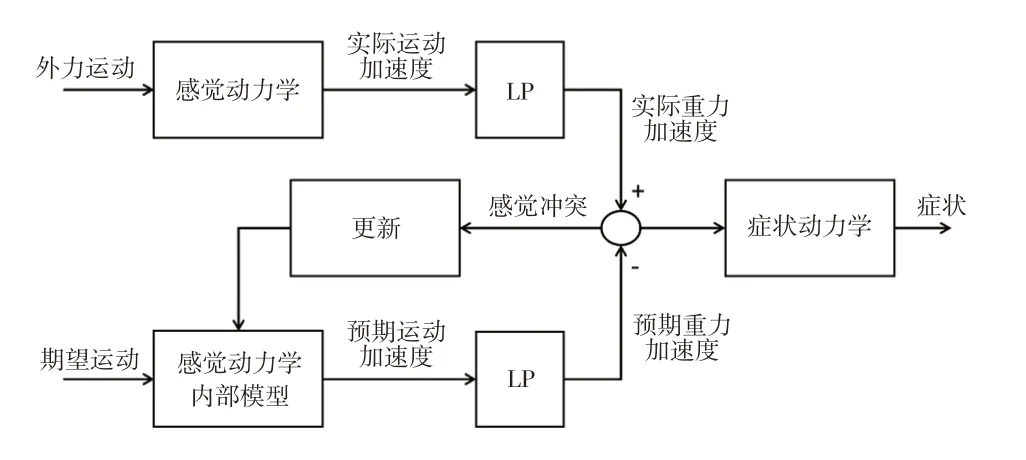
图3 简化后的SVC假说定性模型
2.2 自动驾驶车辆晕动症发生机理
自动驾驶车辆中驾驶员角色的转变、自动化的驾驶风格以及乘客乘车行为姿态的改变,都将导致乘员晕动症发生率和严重程度的增加。
随着自动驾驶车辆自动化级别的提高,驾驶员转变为乘客,自动化的驾驶风格,尤其是急加速、急减速与急转弯等驾驶行为,使乘客经历不习惯的运动刺激。Griffin 等人针对地面车辆的运动加速度刺激,以水平方向为主,对受试者施加水平方向上不同频率与幅值的加速度刺激进行晕动测试。结果表明:在相同频率下,晕动症发生率随运动刺激幅值的增加而增加;在相同幅值下,晕动症发生率随运动刺激频率的增加先增加后减小,并在0.03~0.25 Hz达到峰值。根据感觉冲突假说,若车辆驾驶行为给乘客施加低频加速运动等人体不习惯的运动刺激,根据以往经验进行运动估计的内部模型所预期的运动信息与实际感知的运动信息将出现较大差异,从而产生易引发晕动症的感觉冲突。同时,已有研究指出,同乘一辆车时,乘客通常比驾驶员更易患晕动症。Rolnick 和Lubow针对驾驶员与乘客晕动症发生率的不同进行试验研究,将22 对受试者暴露在刺激的旋转运动中,每一对受试者中的一人可以控制旋转运动和头部运动,另一人只能被动地进行相同的旋转运动和头部运动。结果表明,被动运动组晕动症的发生率比控制运动组晕动症的发生率提高了78%。根据感觉冲突假说,驾驶员通过控制车辆运动能够对未来的运动轨迹进行预测,可以更快地减小内部模型预期感觉传入与实际感觉传入的感觉冲突,而乘客无法控制运动,使得感觉冲突存在时间较长或无法消除,晕动症的发生率和严重程度提高。
大多数乘客在乘坐自动驾驶车辆时选择进行阅读、看电视、工作等将视线集中于车内显示器的活动,为便于乘客间的交流,自动驾驶车辆中通常会设置可旋转的座椅,乘客乘坐时可朝向侧方或背离行驶方向。Cowings 和Toscano 等人的试验结果表明,受试者在车辆行驶过程中观看显示器,晕动症发生率提高。根据感觉冲突假说:若车辆以恒定速度行驶,前庭系统感知到身体处于静止状态,与注视车内静态场景或观看静态图像的显示器时视觉系统感知到的静止景象一致,产生感觉冲突引发晕动症的可能性并不大;而在以恒定速度行驶的车辆上观看具有动态内容的显示器,或视线集中于静态场景时车辆速度发生变化,前庭系统与视觉系统感知到的运动不一致,就会产生易引发晕动症的感觉冲突。同时,这些非驾驶活动场景都将使乘客无法充分获取关于前方道路的视觉信息。Feenstra 和Bos 等人针对视觉信息预测未来运动轨迹的有效性,在驾驶模拟器中进行晕动测试,结果表明行驶轨迹未知时受试者的晕动症发生率提高了4 倍。根据SVC假说,乘客在被动运动的情况下无法获取充分的视觉信息以预测未来运动轨迹,使得感觉冲突持续时间较长或无法消除,晕动症的发生率和严重程度提高。
3 自动驾驶车辆晕动症测量方法
自动驾驶车辆中个体患晕动症严重程度的差异与运动刺激和个体晕动症易感性等因素有关。评价个体晕动症易感性强弱与测量个体晕动症严重程度的方法分为主观测量法和客观测量法。
3.1 主观测量法
主观测量法主要有问卷调查法和症状诊断法。
目前使用最广泛的调查问卷是Golding提出的晕动症易感性问卷(Motion Sickness Susceptibility Questionnaier,MSSQ)。MSSQ 根据个体在儿童时期和成人时期是否会在乘坐交通工具或者游乐设施时发生晕动症症状,以及症状发生的频率和严重程度,利用计算公式对个体晕动症易感性进行量化。Meschtscherjakov 和Strumegger 等人针对21~60 岁的人群进行了广泛的MSSQ问卷调查研究,结果显示,受试人群MSSQ评分范围为28.6~100,均值为77.85。MSSQ通常在运动试验前使用,以了解受试者易感性的整体水平,判断所选受试者是否具有群体代表性。
常用的调查问卷还包括晕动症评估问卷(Motion Sickness Assessment Questionnaire,MSAQ)和痛苦程度量表(Misery Scale,MISC)。MSAQ 分为胃肠道(胃部不适、恶心)、中枢(昏厥、头晕)、外围(冷汗、发热)、睡眠(困倦、疲劳)4个方面,由16个问题组成,通过受试者对各症状从1分(完全没有)到9分(严重)的评分,评估晕动症的严重程度。MSAQ 通常在试验开始前和结束后使用,以评估试验的有效性,但无法记录试验过程中症状的变化情况。MISC 则允许在试验期间的不同时间点使用,以11分制衡量晕动症的严重程度,通常在受试者的评分达到6时停止运动刺激。
症状诊断法通过观察晕动症患者的临床症状和表现评定患者的晕动症严重程度。早期只通过呕吐的症状来诊断晕动症,目前的诊断量表通过患者的各种症状和体征进行综合诊断。
主观测量法因实施方便、成本低、有效性高被广泛采用,但多用于试验开始前和结束后,无法记录晕动症严重程度随时间的推移而可能存在的非线性变化。
3.2 客观测量法
客观测量法通过测量个体的各种生理信号与指标反映该个体晕动症的严重程度,并评价其晕动症易感性。
前庭-眼动反射(Vestibulo-Ocular Reflex,VOR)是目前临床上测量晕动症严重程度的比较常用的方法。前庭器官是与视觉有关的主要器官,前庭器官与单突触和多突触动眼神经核联系、小脑与各种中枢联系时,前庭半规管的神经活动影响动眼肌的收缩与放松活动。
胃电图(Electrogastrogram,EGG)用于检测晕动症发生后的胃部活动变化,Hu 和McChesney 等人发现EGG活动增加,即胃节律失常,是反映晕动症症状严重程度最敏感的生理指标。
心率变异率(Heart Rate Variability,HRV)用于检测晕动症发生后交感神经和迷走神经的活动性。Ishii和Igarashi等人发现在前庭-视觉冲突情境下,通过交感神经活动引起的心率变化增加。Lin和Jung等人通过检测HRV证明晕动症严重程度的增加会提高交感神经活性,降低迷走神经活性。
Gruden 和Popovic 等人通过EGG 与HRV 信号测量晕动症的严重程度,结果表明,在驾驶模拟器运动过程中,EGG与HRV信号幅值随运动刺激的增加而增加,但与对照组差异并不显著,没有达到统计学意义。Schartmuller 和Riener通过EGG 信号测量晕动症的严重程度,结果表明,一段时间内检测到的EGG信号幅值增加可以作为准确的短时指标,但试验前测和试验后测的信号幅值差异并不显著,不具有统计学意义。
客观测量法通常需要测量VOR、EGG 与HRV 等参数的组合,无法只使用一个有效的生理参数准确地表征晕动。而且生理信号易受到噪声与受试个体的影响,测量结果难以实现统计学意义。
4 自动驾驶车辆晕动症减缓方法
减缓自动驾驶车辆晕动症的关键在于减少易引发晕动症的感觉冲突。目前减缓自动驾驶车辆晕动症的方法分为感觉线索获取与运动算法优化。
4.1 感觉线索获取
感觉线索包括视觉线索、听觉线索、触觉线索等。有关视觉线索的研究最为广泛。根据感觉冲突假说,视觉系统与前庭系统感知到的运动一致时,能够避免产生易引发晕动症的感觉冲突。密歇根大学的研究团队提出防晕车眼镜架,在乘客的视觉边缘设置4个含有色液体的圆环,当车辆进行加速、制动、转弯、颠簸等运动时,圆环内液体随之流动。Bos和MacKinnon等人提出在显示器周围施加与车辆运动一致的视觉刺激,或控制显示器的位置与车辆运动同步,以提供与车辆运动相一致的稳定图像。同时,根据SVC 假说,通过视觉线索获取未来运动轨迹信息时,能够更快地减小或消除感觉冲突。Diels和Bos等人提出将显示器定位在窗口附近,使乘客在利用中心视觉查看显示内容的同时,利用周边视觉获取路径信息,并且限制显示器的尺寸以提供足够的外围视觉信息,或使用增强现实(Augmented Reality,AR)显示器,将显示内容叠加在前方道路的视图上。Meschtscherjakov 和Strumegger 等人提出,在车内使用有机发光二极管(Oganic Light Emitting Diodes,OLED)等照明技术,通过不同的灯光显示,提示车辆即将进行的操作。Winkel和Pretto 等人提出设计与车辆运动路径相一致的虚拟现实(Virtual Reality,VR)游戏的方法。
除了视觉线索,听觉线索与触觉线索等也能达到提供未来运动轨迹信息的目的。与视觉线索相比,当乘客在进行阅读、看电视等以视觉任务为主的非驾驶活动时,获取非视觉线索所需的注意力更少。Kuiper 和Bos等人提出在车辆运动前通过车内音频向乘客告知车辆即将进行的操作。Yusof 和Karjanto 等人提出在乘车时穿戴装有电机的袖套,通过不同的振动模式,提示车辆即将进行的操作。优步(Uber)研究团队提出车内感官模拟系统,通过AR技术将车外环境信息呈现在车内,并在车辆加速、减速和转弯时给出相应的气流以同步乘客的体感信息。
4.2 运动算法优化
运动算法优化包括运动规划算法优化与运动控制算法优化。
通过优化自动驾驶车辆运动规划算法,可在完成特定行驶目标的同时,选取最小化乘客晕动症发生率的行驶方案。Waymo研究团队针对车辆在拥堵路段行驶时急加速、紧急制动行为较多的问题,提出根据备选路径拥堵情况判断晕动症发生率的算法,选择晕动症发生率最小的路径,并通过显示面板与乘客交流,获取乘客的晕动反馈以及时调整驾驶风格。Htike和Papaioannou等人基于不同频率的加速度刺激对晕动症发生率影响不同的现象,提出了对任意路径规划最优加速度轨迹的最优控制算法,最小化固定行驶时间内乘客的晕动症发生率。通过优化自动驾驶车辆运动控制算法,优化车辆加速度信号、制动信号、前轮转角等运动控制参数,以避免急加速、急减速与急转弯等刺激性驾驶行为。Saruchi 和Mohammed 等人基于弯道行驶时车辆横向加速度与乘客头部倾斜角度相关性,针对晕动症发生率随头部倾斜角度增加而提高的现象,提出根据车辆横向加速度预测乘客头部倾斜角度、通过调整车辆前轮转角降低乘客晕动症发生率的算法。
5 结束语
本文从自动驾驶车辆晕动症发生机理、测量方法和减缓方法3个方面展开,通过分析近年来的相关文献,对现有的理论、方法与技术进行了总结,得到如下结论和展望:
a.目前自动驾驶车辆晕动症发生机理的研究多建立在感觉冲突假说与SVC假说定性模型的基础上,且多为人体感觉系统生理模型,缺乏结合易引发晕动症的车辆运动特性的定量模型,无法对乘客晕动程度进行量化。探究自动驾驶车辆运动状态对乘客晕动症的作用机制与定量关系,建立感觉系统与车辆动力学系统相联合的晕动症发生机理模型,将为减缓自动驾驶车辆晕动症的研究奠定理论基础。
b.目前在自动驾驶车辆晕动症研究或试验中采用的测量方法多为主观测量法,存在随机性与非实时性的问题,客观测量法可以实时采集人体生理数据进行定量化评估,但稳定性不高且测量体系不够全面。进一步在大规模数据中统计分析人体发生晕动症时生理信号的多模态特征与动态演变规律,并建立统一的自动驾驶车辆晕动症客观测量标准,将对自动驾驶车辆晕动症减缓技术的发展起到较大的推动作用。
c.目前减缓自动驾驶车辆晕动症的方法多为视野范围、注视方向、车内环境与座舱布置的优化,有效但并不只针对自动驾驶车辆,在传统车辆中同样能达到减缓晕动症的目的。结合自动驾驶车辆运动状态可控的特点,优化自动驾驶车辆运动算法主动减缓晕动症的研究较少,且大多数研究未通过实车或人体试验验证有效性。优化自动驾驶车辆运动规划算法与运动控制算法,使车辆在保证行驶安全性和操纵稳定性的同时达到最优运动状态,改善车辆对乘客的运动刺激以降低乘客晕动症发生率,将是自动驾驶车辆晕动症减缓技术的未来发展方向。
自动驾驶车辆晕动症研究的发展与完善,将对改进自动驾驶车辆算法和提升乘坐舒适性起到推进作用,提高大众对自动驾驶出行服务的认可程度,促进自动驾驶出行服务的正向发展,产生巨大的经济和社会效益。
猜你喜欢
环球时报(2022-04-16)2022-04-16 14:38:15
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:10
井冈教育(2020年6期)2020-12-14 03:04:32
学生天地(2020年5期)2020-08-25 09:09:08
今日农业(2019年16期)2019-01-03 11:39:20
电子测试(2018年10期)2018-06-26 05:53:36
数学小灵通(1-2年级)(2016年3期)2016-11-15 08:56:16
汽车博览(2016年9期)2016-10-18 13:05:41
公民与法治(2016年2期)2016-05-17 04:08:24
交通建设与管理(2015年15期)2015-03-20 15:19:15