基于PLC的立体仓库设计
2022-08-23 01:42李雅静张小青李艳红
机械工程与自动化 2022年4期
李雅静,张小青,李艳红
(咸阳师范学院 物理与电子工程学院,陕西 咸阳 712000)
0 引言
以前的仓库主要通过人力进行货物的装卸,而装卸一些较大的货物时,不仅进度缓慢而且还存在较大的安全风险,存储空间也得不到充分的利用[1,2]。立体仓库能够在有限的空间存储更多的东西,存储简单快捷且通过计算机控制代替人力管理从而解放了大量的劳动力;使用计算机进行管理,减少了货物运输过程中的各种误差,系统能够实时存储信息和进行各种信息管理,有利于清点货物,避免营运资金的浪费,提高了仓库的管理效率[3,4]。本文采用西门子S7-200 SMART ST40设计了一个可完成自动出库/入库操作的四层十六仓位的立体仓库。
1 立体仓库硬件设计
本系统主要由PLC、电气机构(步进电机及驱动器、减速直流电机、开关电源、电感传感器、行程限位开关)、触摸屏以及X轴、Y轴、Z轴运动机构等构成。开关电源将交流220 V转换成直流24 V提供给中间继电器和步进电机驱动器等弱电电路使用。硬限位开关防止丝杆运动超出预定范围。电感传感器检测是否有物料需要入库或者物料是否已经出库。微动开关用于检测每个仓位是否有物料。X轴、Y轴、Z轴运动机构主要包含滚珠丝杆、轴承、滑块、导轨、步进电机等机电元件;X轴运动机构控制水平左右方向的机构运动,Y轴运动机构控制水平前后方向的机构运动,Z轴运动机构控制垂直方向的机构运动。触摸屏用于控制整个系统的启动、停止、手动、自动、入库和出库等操作。
1.1 PLC的选择
系统中的PLC采用西门子CPU ST40 DC/DC/DC,内置24路数字量输入、16路数字量输出,同时可外接相应扩展模块,能满足系统的控制要求[5]。图1为PLC端子接线图。
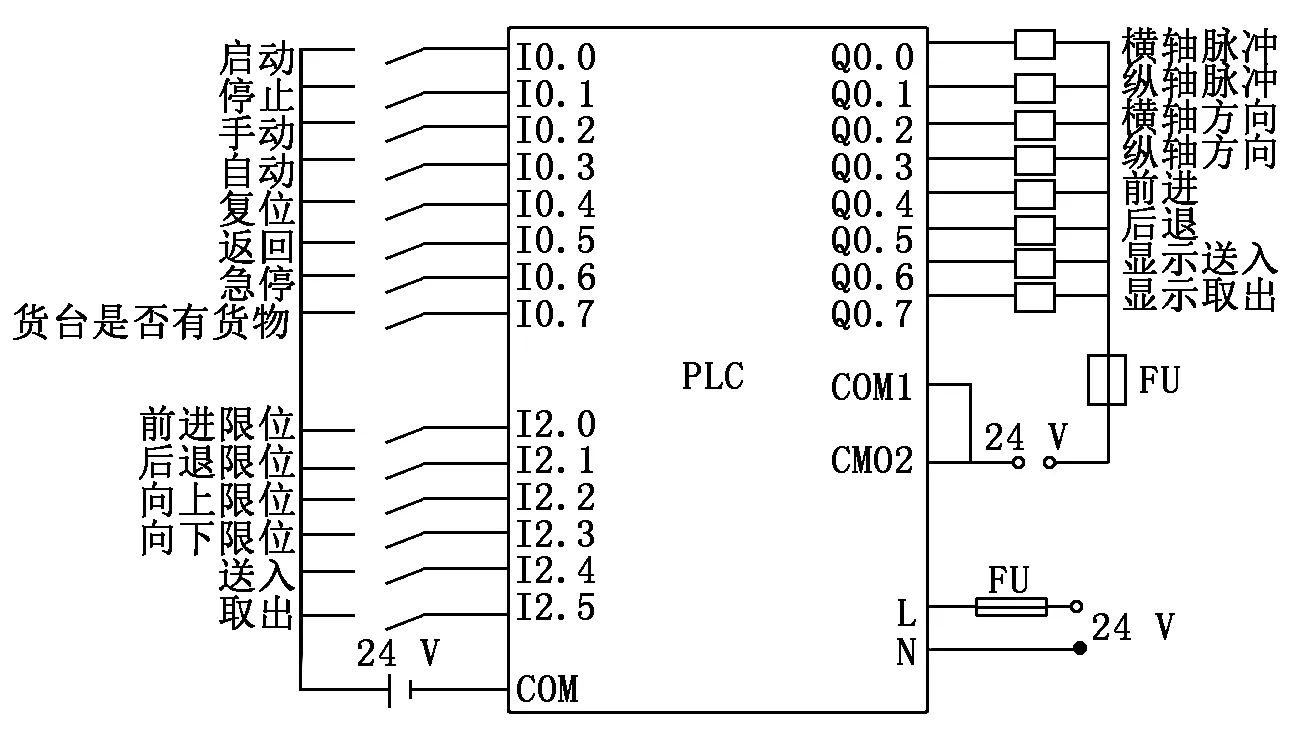
图1 PLC端子接线图
1.2 主要电气设备的选择
本系统所使用的电机为NEMA23-23HS8630,采用汉德保公司研制的一种步进驱动器DM-542。该驱动器通过专用的DSP芯片进行步进电机的控制,这种芯片是通过空间矢量PID电流的控制技术运行的,内部含有参数自动整化等优秀的性能。电感传感器采用电感式接近开关传感器LJ30A3-15-Z/BY,用作货物检测,当金属的探测仪器靠近开关的感应区域时,开关可以在没有东西接触、没有压力、没有火星的情况之下准确而快捷地发出指令,反映出运动的当前位置和行程[6-9]。
2 立体仓库软件设计
本设计主要的控制要求是将入库位置的货物送到任意空白仓位或者从任意有货仓位取回货物放至出库位置。其中,上位机可以监视物料的出库入库情况以及传达操作员所选择的功能给PLC,使执行机构执行相应的动作。PLC通过对输入输出信号的响应,可以快速控制立体仓库,且易于检修。图2为立体仓库程序执行流程图。

图2 立体仓库程序执行流程图
3 系统调试
本文设计了一个立体仓库模拟装置。先进行了手动操作模式的调试,对X、Y、Z轴控制按键进行手动控制,能够顺利地将货物入库/出库。然后进行了自动操作模式控制,通电后先进行复位操作,其次进入到入库操作。当进行入库操作时,首先应选择好货物要送入的仓库,单击仓库号对应的按钮,在触摸屏上显示选中的仓库号,货物则会被感应器检测到,之后堆垛机将会执行送入的命令。若触摸屏显示该位置有货物,则堆垛机不会进行送入操作。当进行出库操作时,首先应选择货物要取出的仓库,单击仓库号对应的按钮,在触摸屏上显示选中的仓库号,从而将货物从中取出。如送货台上有货物,则取货指令会被跳过。当所执行的操作完成后,会按来时的路线原路返回。调试途中无意外。若有意外发生,则按急停按键。
图3所示为货物送入16号仓位。

图3 货物送入16号仓位
4 小结
本文中介绍了一个立体仓库模拟装置的设计,包括硬件选型和软件设计,并对该装置进行了调试,结果显示该系统可以实现货物的自动入库/出库,而且可以实现X、Y、Z三轴步进电机对货物的精准定位。总而言之,本系统的硬件性能优越、性价比高,软件功能丰富,基本上实现了立体仓库的功能要求。
猜你喜欢
新视线·建筑与电力(2021年5期)2021-11-27
北华大学学报(自然科学版)(2021年3期)2021-07-13
现代信息科技(2021年21期)2021-05-07
电子技术与软件工程(2021年20期)2021-03-10
数码设计(2020年15期)2020-12-08
电脑爱好者(2020年6期)2020-05-26
北京航空航天大学学报(2017年5期)2017-11-23
商业会计(2017年24期)2017-09-17
决策与信息(2016年26期)2016-11-26
火力与指挥控制(2015年11期)2015-03-04