超声速飞行器声爆飞行试验与声爆预测评估
2022-08-23 06:50:12瞿丽霞宋亚辉张跃林
空气动力学学报 2022年4期
瞿丽霞,韩 硕,宋亚辉,徐 悦,张跃林
(1. 中国航空研究院,北京 100012;2. 中国飞行试验研究院,西安 710089)
0 引言
声爆问题是超声速民机发展中的重要研究课题[1-3]。声爆问题研究手段主要有三种:数值模拟、风洞试验和飞行试验[4]。数值模拟由于受建模不确定性、计算误差等因素的影响[5-8],需要声爆飞行测试数据进行数值模拟程序验证[9-11]。风洞试验由于受试验段和模型尺寸的限制,测量仅限于近场和中间场,且模型周围的介质并不代表真实大气,因此存在一定的局限性[4,12]。声爆飞行试验是研究声爆特性的最直接手段,可以得到近场和中场的声爆信号以及所有重要的地面测试数据,进而真实了解超声速飞机声爆的产生和传播过程,以及飞机机动飞行和大气湍流等对声爆的影响等,实测数据可用于验证声爆预测方法和低声爆设计技术。因此,针对超声速飞行的飞机开展声爆飞行试验对发展声爆预测技术和低声爆飞行器设计具有重要意义。
美国在声爆领域已经进行了近七十年的探索研究[4],从大量的声爆风洞试验和飞行试验入手,逐步发展完善了以空间压力信号捕捉为特征的声爆试验技术,将丰富的声爆实测数据与声爆效应基本原理相结合,构建起波形参数法[13]、增广Burgers方程[14]等线性、非线性声爆预测方法理论基础,开发了具有工程实用价值的PCBOOM、sBOOM等声爆预测分析工具。在声爆飞行试验研究领域,美国已建立了丰富的超声速流场数据库,包括F-100、B-58、XB-70、SR-71、F-5E/静音锥、SSBD等典型超声速飞行器的近、中、远场声爆信号[4],用于掌握和分析声爆信号的产生、传播特性,可为新一代超声速低声爆飞行器设计提供数据支持。日本JAXA围绕低声爆设计技术验证开展了D-SEND系列项目[15],通过从高空投放模型达到超声速飞行状态并进行声爆信号测试,以验证其低声爆设计技术。欧盟与俄罗斯在RUMBLE项目里也开展了声爆飞行试验相关研究[16]。可见,国外已经积累了比较丰富的声爆飞行实测数据和试验技术,可用于验证近年来发展研制的各类声爆预测程序以及低声爆设计技术。
国内对超声速飞行器声爆特性的研究起步相对较晚,前期主要针对声爆预测方法开展了大量研究[17-21]。近几年在声爆风洞试验中开展了声爆近场空间压力测量技术研究[12],可为近场声爆预测方法提供验证数据。中国航空工业空气动力研究院[22]对亚轨道火箭动力飞行器OS-X0试验模型开展了地面声爆信号测量和数值模拟分析,得到了真实大气条件下高马赫数(Ma= 3~6)飞行器飞行的4个测试点声爆数据,数值模拟预测中未考虑大气湍流和高空大气风场等影响因素。对于需要考虑真实大气影响的远场传播计算方法,还需要更多更丰富的飞行试验数据来验证。国内尚未见有关超声速飞机声爆飞行试验研究的报道。
中国航空研究院于2020年底联合中国飞行试验研究院成功开展了国内首次超声速飞机声爆专项测试飞行试验。本文详细阐述了本次飞行试验的测试方案、测试结果,并结合数值模拟结果进行了对比分析。飞行试验数据与数值模拟结果吻合相对较好,初步验证了声爆预测工具的可靠性。研究工作可为后续超声速飞机声爆飞行试验开展提供经验借鉴,并可为发展超声速民机低声爆设计提供技术支撑。
1 声爆飞行试验
声爆专项试飞前,首先根据声爆试飞的试验要求和所需验证的飞机性能,详细设计了飞机飞越声爆测试阵列上空时的飞行状态(包括飞行姿态、飞行高度、飞行马赫数和飞行轨迹)。然后根据设计的飞机试飞航迹,预估了地面声爆的强度、持续时间等特征信息,结合试验当地温湿度、气压等气象条件,选取满足试验声爆特性的声爆测试设备,并形成完整的测试方案。飞机按设计飞行状态飞过地面声爆测试阵列上空时,按照测试方案进行了飞行轨迹、声爆信号、实时气象等数据采集,获得了真实大气条件下的大量重要实测数据。
该系列飞行试验主要进行低空和高空超声速匀速直线平飞状态的地面声爆测量。飞行试验状态点概况见表1,其中Hp为气压高度。试验状态点(以下简称试验点)的设计基于以下两点:一是考察飞机在不同高度和不同速度飞行状态下的声爆特征;二是检验声爆飞行试验方案和声爆测量技术。飞行试验对大范围的地面声爆信号进行了测量,其中试验点1执行2次,每次试验持续时间不少于120 s,通过测量阵列前、通过测量阵列后这两个时间段各保持不低于60 s;试验点2执行1次,试验点持续时间不少于480 s,通过测量阵列前、通过测量阵列后这两个时间段各保持不低于240 s。

表1 飞行试验状态点概况Table 1 Overview of flight measurement program
下面对试验环境和条件、测量点布置、测试系统设计和试验方法进行简要介绍。
1.1 试验环境和条件
声爆测试场地选择在被测飞机超声速飞行空域的航线正下方,测量区域与飞行航迹如图1所示。测试场地简要情况如下:
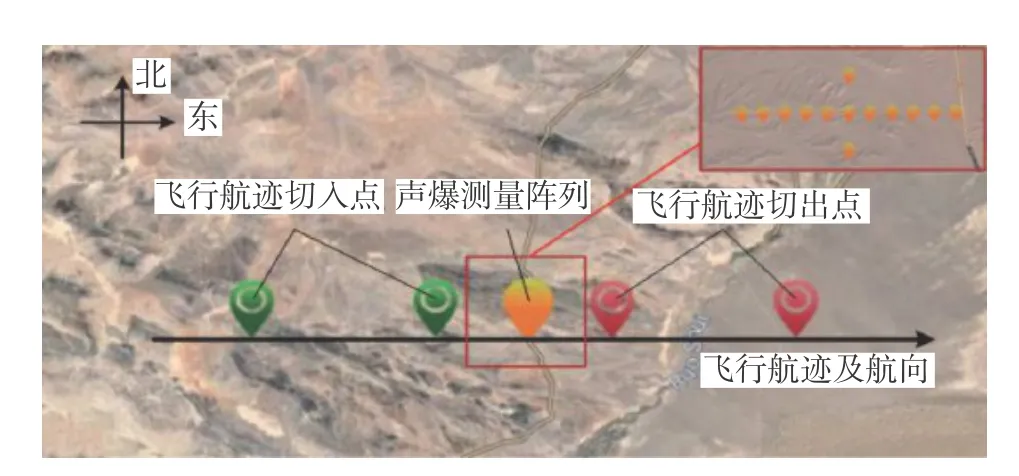
图1 测量区域与飞行航迹Fig. 1 Measurement area and flight path
1)试验场地为不小于2 km×2 km范围的平坦开阔区域,无大范围积雪或积水,植被稀少且植被高度较低,无地面附着物遮挡激波传播路径,常年干旱少雨,声环境和气象环境良好。
2)试验期间,以传声器地面投影为顶点的锥形空间内(轴线与地面垂直半角为80°),无显著影响飞机声场的障碍物。
3)试验期间,无其他飞机噪声、汽车噪声、工农业噪声等干扰,在频率10~10000 Hz (1/3倍频带中心频率)范围内,背景噪声比被测声爆低3 dB以上。
4)试验期间气象条件需满足无降水,相对湿度5%~95%,环境温度−20 ℃~10 ℃,能见度不低于5 km,地面附近没有温度逆增和不规则风向。
1.2 测点布置
图2给出了声爆飞行试验测试系统测量阵列布置方案。地面声爆采用位于飞行航迹正下方的由高声压传声器组成的十字形声阵列进行测量,共计13个测量点,阵列主方向沿飞行航迹方向,长度为1200 m,垂直于航迹方向的长度为400 m。在航迹下游布置气象站,实时进行地面与空中气象参数(包括温度、湿度、气压、风速等)测量。试验前,采用差分GPS设备对声爆测量阵列的每个阵元进行精确定位,表2给出了地面声爆测量阵列各测量点位置的实测值。
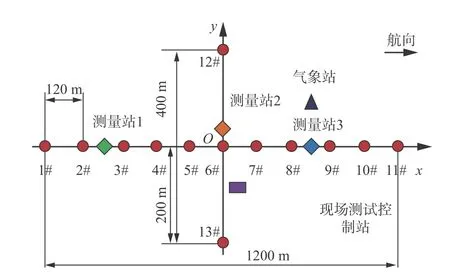
图2 声爆飞行试验测试系统测量阵列布置方案Fig. 2 Layout of the sonic boom measurement system

表2 地面声爆测量阵列各测量点位置的实测值Table 2 Location of ground sonic boom measurement array
1.3 测试系统
本次声爆飞行试验主要进行了三个方面的参数测量:地面声爆特性测量、飞行状态参数/飞行航迹测量、试验场气象条件测量。测量采用统一的GPS时间基准进行数据同步。设计的声爆飞行试验测试系统原理图如图3所示。图4给出了声爆飞行试验测量设施场地布置示意图。
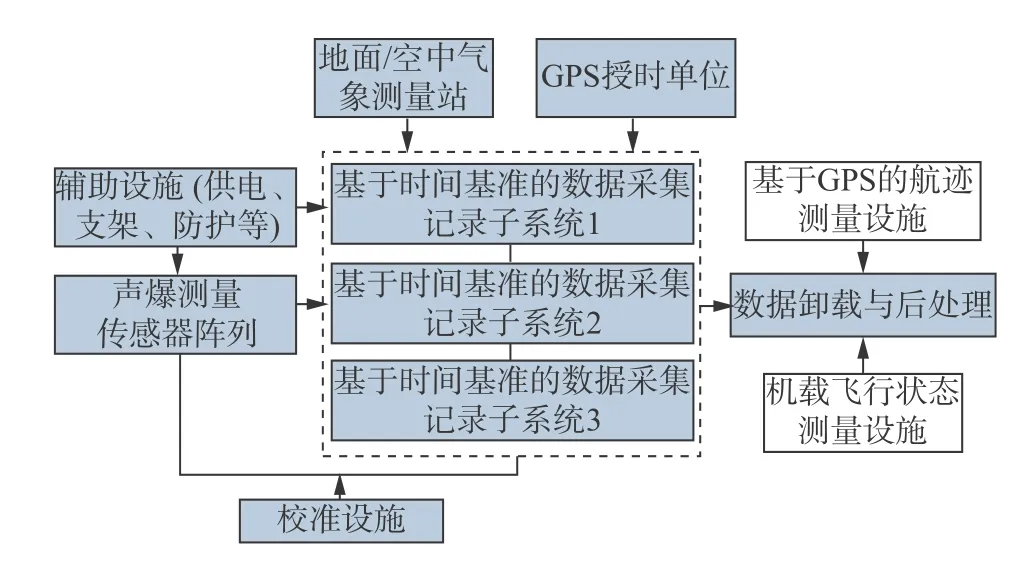
图3 声爆飞行试验测试系统原理图Fig. 3 Schematic of the sonic boom flight test system
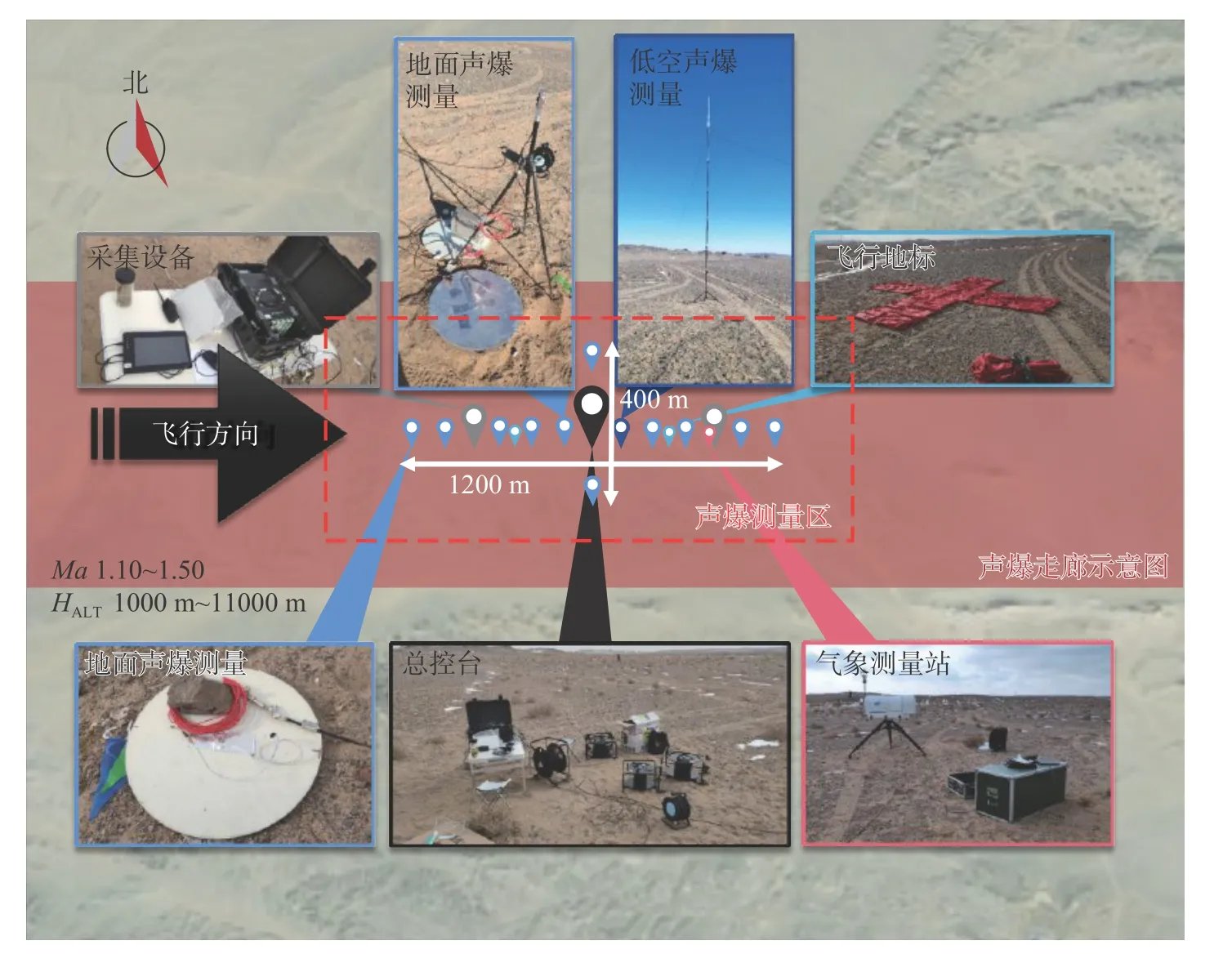
图4 声爆飞行试验测量设施场地布置示意图Fig. 4 Layout of sonic boom flight measurement system
1.4 试验方法
试验飞机按照表1拟定的试验点飞行,即,以给定马赫数在不同高度进行稳定平飞的状态下产生目标声爆。图5给出了飞行试验方法示意图。飞机分别沿图中3 km和11 km高度设计航迹飞行,声爆测量点阵列全部布置在飞行航迹正下方,阵列主方向与飞行目标航迹保持平行,飞机在飞行至图1所示的飞行航迹切入点时调整至表1拟定的试验状态,确保以目标状态飞越声爆测量阵列。切入点的确定主要考虑飞机的基本飞行性能、操稳特性和飞行员操作效能,根据飞行速度、测量区域位置,飞机飞行至航迹切入点后直至航迹切出点之间需保持飞行状态不变。航迹切出点的确定原则是飞机尽可能远离测量区域,不影响任何测量点的声爆测量,同时考虑飞机超声速飞行性能和空域限制等条件。执行试验期间,测试系统连续进行声爆、地面与空中气象、飞行状态、飞行航迹等参数的测量。

图5 飞行试验方法示意图Fig. 5 In-flight test method
试验中,首先执行了2次试验点1,对声爆测试方案进行可靠性验证。随后,执行了1次试验点2,对较高飞行高度和较大飞行马赫数状态的声爆测试方案进行检验。
2 数值模拟方法
飞行器超声速飞行时,空气在机体附近被强烈压缩,机体后方产生圆锥状的声学扰动,其产生的声爆在真实大气中的传播过程如图6所示。
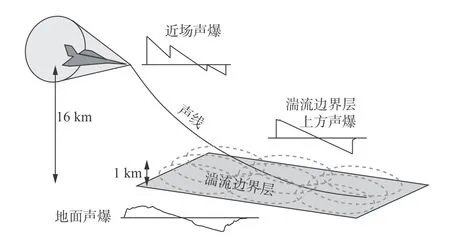
图6 声爆在真实大气中传播过程示意图Fig. 6 Sketch of the propagation of sonic boom in real atmosphere
图7给出了声爆预测计算域示意图。中国航空研究院开发的声爆数值模拟软件CBoom,是集成了CFD数值模拟方法、远场传播模型组合、主观响应评价方法的混合预测方法,可实现完整航线内的声爆预测与评估。

图7 声爆预测计算域示意图Fig. 7 Calculation domain for sonic boom prediction
采用已经过充分验证的CFD方法求解三维Euler方程预测近场声爆信号[19],利用基于增广Burgers方程的远场传播程序预测远场声爆信号的传播过程[20],并计算得到地面声爆信号(地面反射因子取值1.9)。选择史蒂文斯响度法作为声爆总响度级的计算方法[21],开展地面声爆信号的主观响应评估。
3 结果分析与讨论
3.1 飞行试验概况
本次声爆飞行试验共完成3架次,取得3组有效试验数据(声爆过压信号、地面与空中气象、飞行状态与飞行航迹),飞行试验概况见表3。其中,Hp为被测飞机的气压高度,HG为被测飞机离地高度。
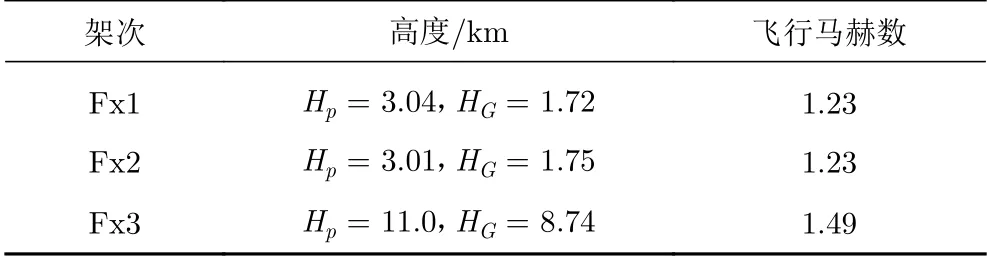
表3 飞行试验概况Table 3 Overview of flight tests
3个架次测得的声爆信号过压峰值分布见图8。其中,Fx1和Fx2架次飞行试验测得的声爆信号波形测试数据重复性较好,声爆信号头激波峰值相对误差在18%左右,尾激波峰值相对误差在8%左右,验证了声爆飞行测试试验方案的可靠性。Fx3架次由于飞行高度较高,声爆信号过压峰值相对前两个架次大幅减小。
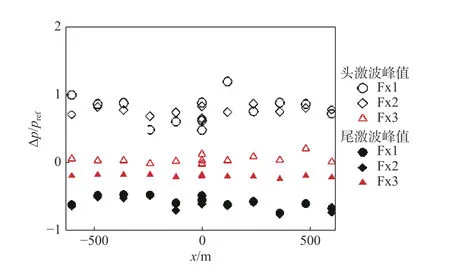
图8 实测声爆信号的过压峰值Fig. 8 Peak over-pressure of the measured sonic boom signature
为了考察飞行航迹正下方及一定方位角的实测数据,结合Fx1和Fx3的典型测点数据,采用第2节介绍的数值方法对被测飞机超声速飞行产生的声爆信号进行数值预测,并将预测结果与飞行实测数据进行对比分析。
3.2 Fx1架次飞行试验与数值模拟结果对比分析
从飞行航迹测试数据来看,被测飞机在Fx1架次飞行试验时,基本按照预定的飞行路径从测试阵列正上方飞过。图9和图10给出了声爆测试信号,分别来自于已校准和定位的13个沿着航迹分布的测点。可见,沿航迹正下方的信号波形具有显著相似性。

图9 声爆测试信号(Fx1,1#~11#测量点,y = 0)Fig. 9 Measured sonic boom signature (Fx1, 1#~11#, y = 0)
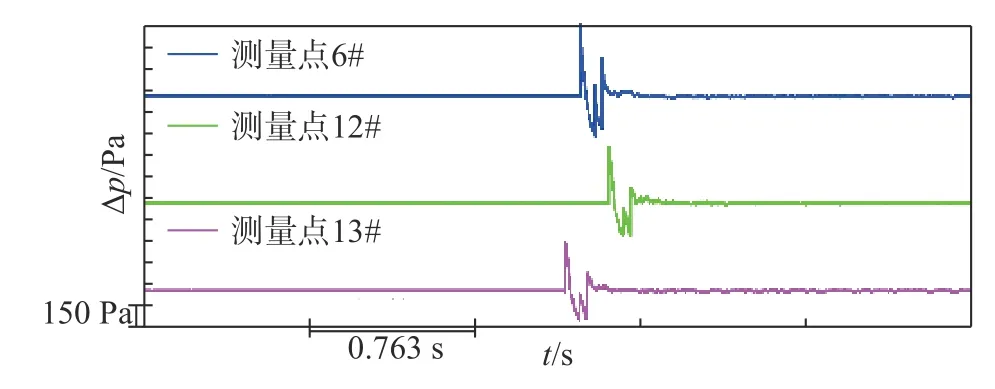
图10 声爆测试信号(Fx1,6#、12#、13#测量点,x = 0)Fig. 10 Measured sonic boom signatures (Fx1, 6#,12#,13#, x = 0)
图11中给出了Fx1架次飞行试验过程中,声爆信号测试时刻对应的地面/空中气象测试结果,可用作后续远场传播程序的计算输入。

图11 地面/空中气象测试结果(Fx1)Fig. 11 Meteorological conditions for the flight test Fx1
3.2.1 近场声爆信号传播到远场的演变过程分析
根据被测飞机的飞行状态,对巡航马赫数1.23、巡航高度1.72 km、不考虑动力影响的简化模型,采用CFD方法预测得到近场声爆信号。CFD计算得到的近场过压云图如图12所示,图中给出了对称面及距离飞机轴线3倍、5倍机身长度(H/L= 3和H/L= 5,H为距离飞机轴线间距,L为模型长度)处的过压云图。
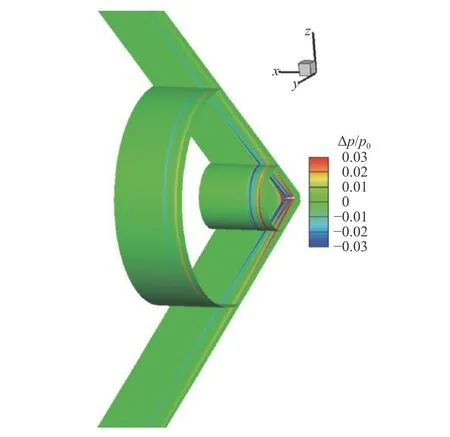
图12 CFD计算得到的近场过压云图(Ma = 1.23)Fig. 12 Near-field over-pressure contours calculated by CFD (Ma = 1.23)
图13给出了飞机正下方的近场过压信号随距离机身间距(H/L= 1,2,3,5,10)变化情况。在3倍机身距离内,可观测到复杂的锯齿状声爆信号,激波分别来自机头和座舱盖,随后是一个较强的机翼激波。随着距离增大,整个声爆信号的长度增加,过压减小,机翼前缘激波向头激波移动并趋于合并。
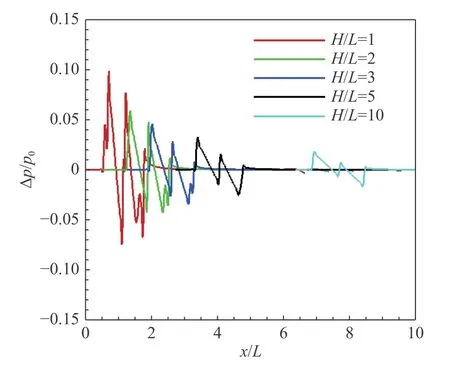
图13 飞机正下方的近场过压信号随距离机身间距变化情况,H/L = 1~10(Ma = 1.23)Fig. 13 Variation of on-track overpressure signatures with the distance from the aircraft, H/L = 1~10(Ma = 1.23)
采用上述不同H/L值对应的近场信号进行远场传播计算,研究表明:3倍左右机身长度处提取的近场信号作为远场传播方程的输入,具有较高的可信度。因此,以H/L= 3位置处提取的近场过压信号作为输入,采用基于增广Burgers方程的远场传播程序,预测得到了不同离地高度处(HALT表示远场波形离地高度,HALT= 0 m即为地面)的远场波形。图14给出了近场过压信号传播到远场地面的演变过程。可见,随着与机身之间距离的增大,声爆波形逐渐演变为接近N波形态,声爆信号强度大幅衰减,对应的过压峰值大幅减小,但持续时间有所增加。尤其是在HALT= 1.0~1.5 km范围内,声爆信号过压峰值衰减迅速。但是由于被测飞机在Fx1架次飞行试验过程中,飞行的离地高度HG只有1.72 km,距离地面测试阵列较近,所测得的声爆信号尚未完全发展为典型N波形态。
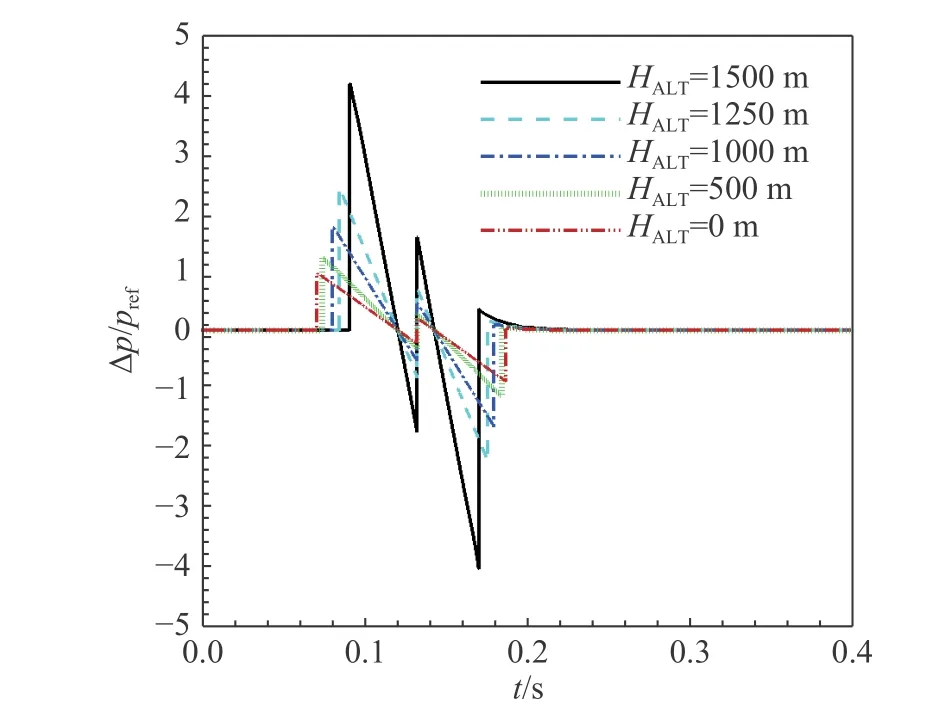
图14 近场过压信号传播到远场地面的演变过程(Ma = 1.23,H/L = 3)Fig. 14 Propagation process of over-pressure from H/L = 3 to the ground (Ma = 1.23)
在距离飞机轴线3倍机身长度处(H/L= 3)提取近场过压分布(图15a),选取若干个典型周向角(ϕ)位置的声爆过压信号(图15b)作为输入,预测其传播到远场的地面声爆信号如图16(a)所示。可见,在马赫数1.23的飞行条件下,被测飞机所产生的声爆信号传播侧向截止点在ϕ= 69°位置。飞机正下方的声爆信号过压峰值最大,持续时间最短;随周向角增大,过压峰值和持续时间呈单调变化。图16(b)给出了声爆传播射线及地面影响域的预测结果。在无风条件下,声爆由飞机向地面传播的射线组相对于xz平面(飞行轨迹所在的垂直面)呈对称分布,其所形成的地面影响域在xy平面(地面)上的投影线也呈对称分布。射线与地面相交的最大周向角为69°,最小周向角为−69°。

图15 H/L = 3圆柱面上典型周向角声爆信号预测值(Ma = 1.23)Fig. 15 Predicted sonic boom signatures on cylindrical surface with H/L = 3 at typical circumferential angle (Ma = 1.23)
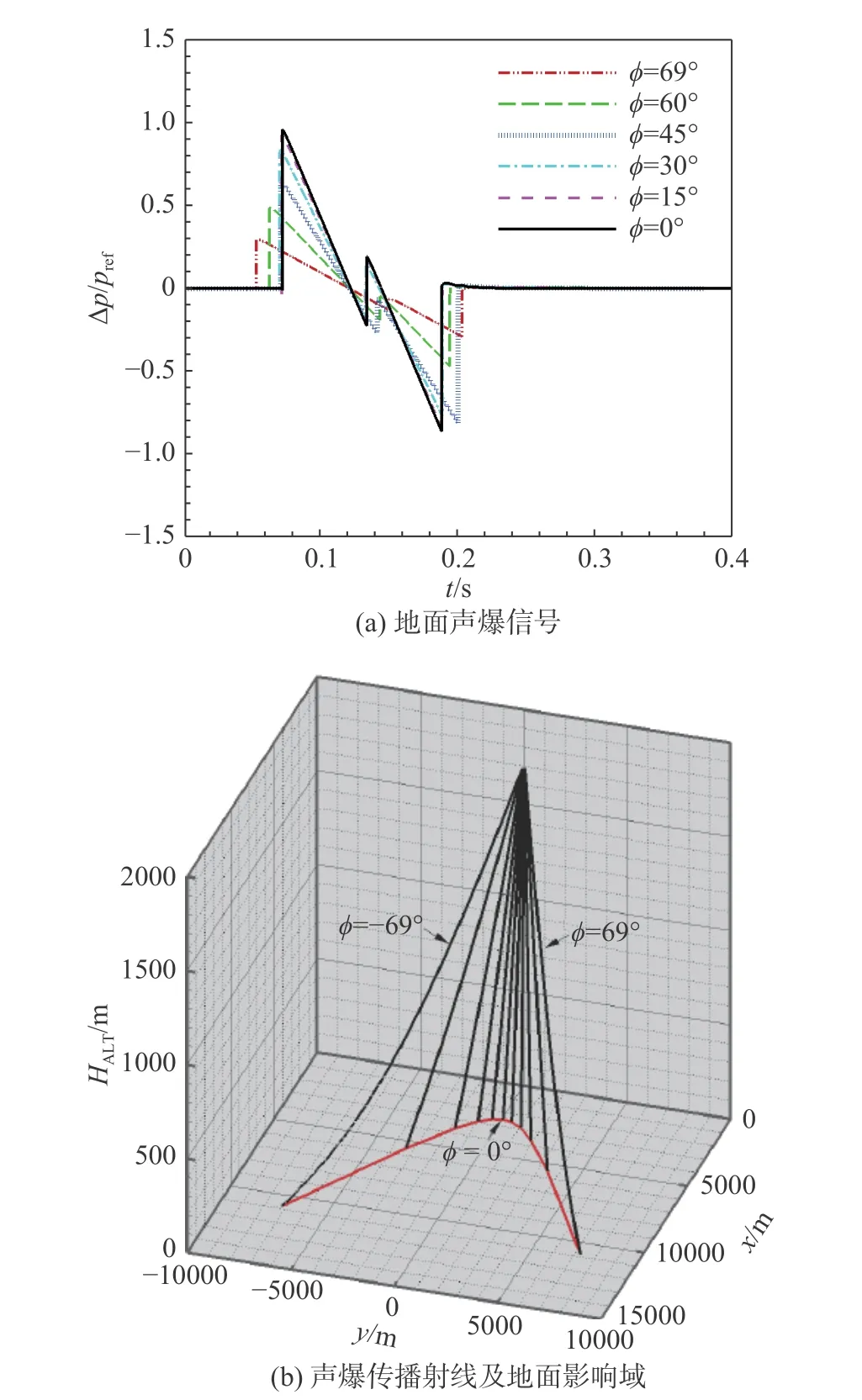
图16 H/L = 3圆柱面上典型周向角声爆信号传播到地面的预测结果(Ma = 1.23)Fig. 16 Predicted ground sonic boom signatures propagating from typical circumferential angle on cylindrical surface at H/L = 3 (Ma = 1.23)
3.2.2 数值模拟结果与飞行试验数据对比分析
图17给出了Fx1架次飞行试验过程中6#、12#、13#测点对应的飞行试验实测数据与CBoom数值模拟结果的对比。由6#测点(Fx1_P6)的结果可见:除了尾部发动机喷流激波(图17右侧)外,实测数据与预测得到飞机航迹正下方(ϕ= 0°)的头激波、机翼前缘激波峰值都吻合较好,相对误差小于5%;声爆信号基本形态一致,持续时间比较接近。由此表明,声爆信号的预测值与飞行试验测量值具有很好的相关性。
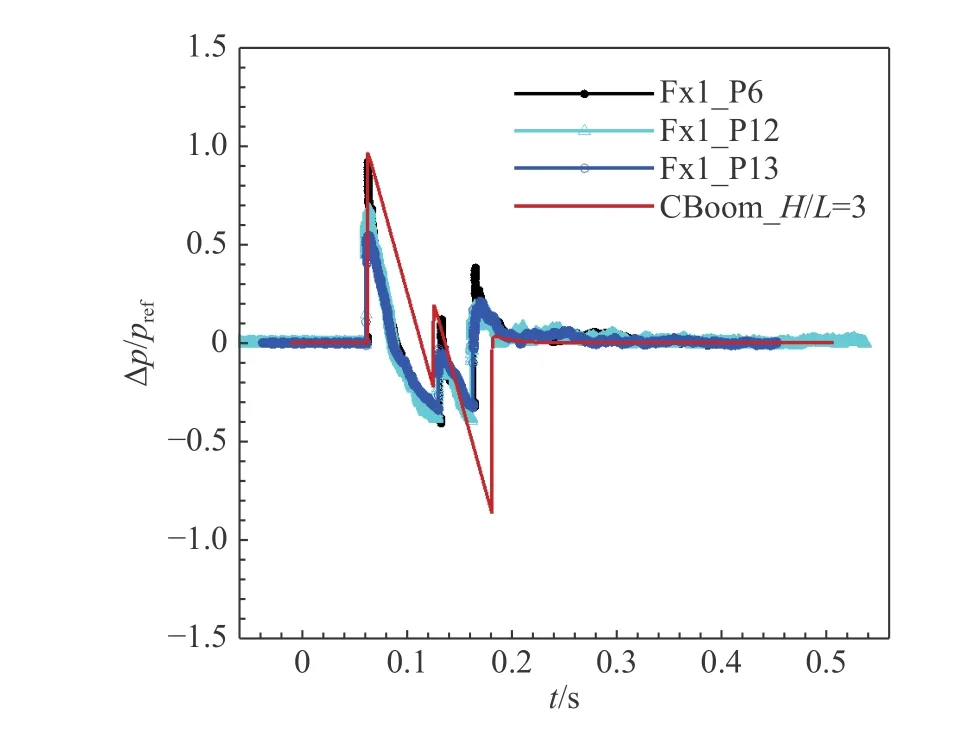
图17 地面声爆过压信号对比(Ma = 1.23)Fig. 17 Comparison of ground over-pressure (Ma = 1.23)
但是,12#、13#、6#三个测点测得的声爆过压峰值发生了显著变化(12#、13#测点与6#测点相距仅120 m,位于被测飞机侧向±6.63°),分析推测这极有可能是与大气条件相关的声爆信号波形变化导致的,由此推论,与大气层相关的微观大气效应对声爆信号的综合影响非常重要。
根据Fx1架次飞行试验与预测得到的地面声爆信号,采用史蒂文斯响度法计算了H/L= 3处、不同周向角的近场过压信号传播到远场的声爆信号对应的响度级。飞机飞过测试阵列正上方时,地面声爆响度级对比如图18所示。实测数据的响度级均值为120.3 PLdB,预测数据得到的响度级为123.0 PLdB,误差在±3 PLdB以内。
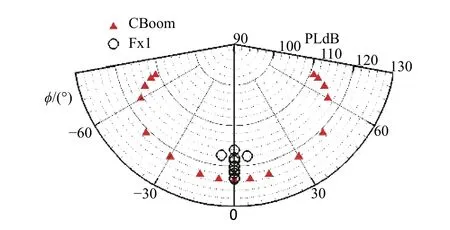
图18 地面声爆信号响度级对比(Ma = 1.23)Fig. 18 Comparison of loudness levels for ground sonic boom signatures (Ma = 1.23)
3.3 Fx3架次飞行试验与数值模拟结果对比分析
从飞行航迹测试数据来看,被测飞机在Fx3架次飞行试验时,飞机距离地面较远。图19和图20给出了13个测点声爆测试信号。这些测量值可以用于分析声爆信号与方位角之间的关系。图21给出了Fx3架次飞行试验过程中,声爆信号测试时刻对应的地面/空中气象测试结果。
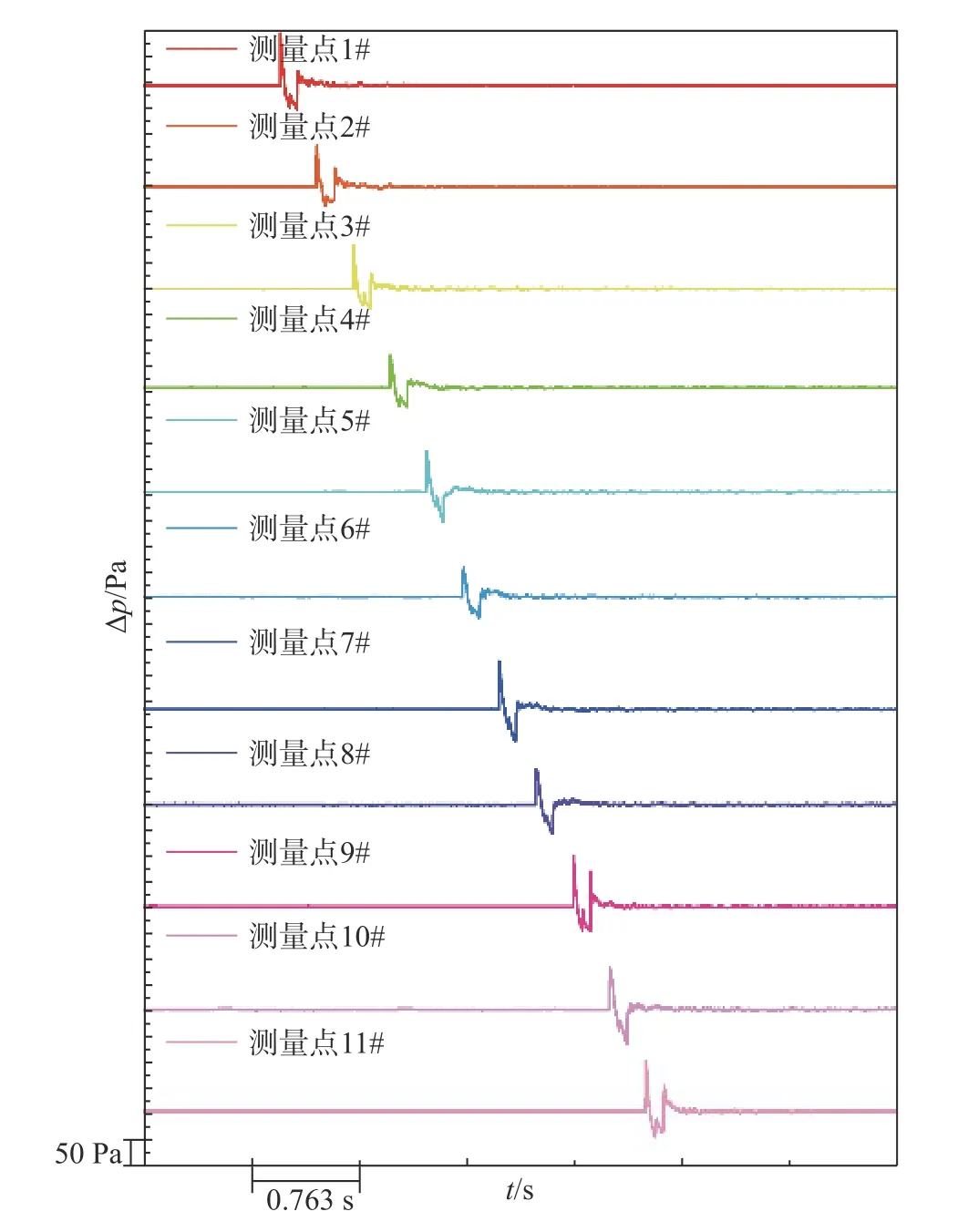
图19 声爆测试信号(Fx3,1#-11#测量点,y = 0)Fig. 19 Measured sonic boom signature (Fx3, 1#-11#, y = 0)
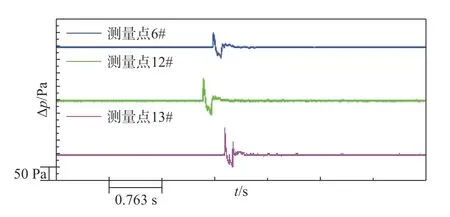
图20 声爆测试信号(Fx3,6#、12#、13#测量点,x = 0)Fig. 20 Measured sonic boom signature (Fx3, 6#,12#,13#, x = 0)

图21 地面/空中气象测试结果(Fx3)Fig. 21 Measured ground/air weather results (Fx3)
3.3.1 近场声爆信号传播到远场的演变过程分析
根据被测飞机的飞行状态,对巡航马赫数1.49、巡航高度8.74 km、不考虑动力影响的简化模型,采用CFD方法计算得到的近场过压云图如图22所示,包括对称面以及距离飞机轴线3倍、5倍机身长度处的过压云图。
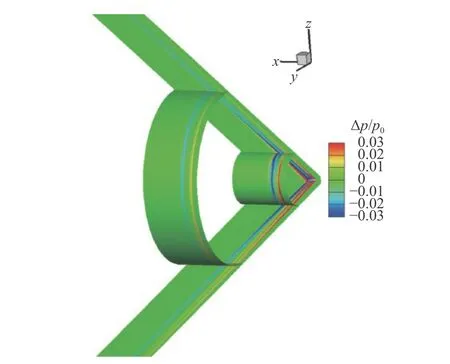
图22 CFD计算得到的近场过压云图(Ma = 1.49)Fig. 22 Near-field over-pressure contours calculated by CFD (Ma = 1.49)
图23给出了不同位置(H/L= 1,2,3,5,10)的近场过压信号。波形变化趋势与第3.2.1节情况类似。
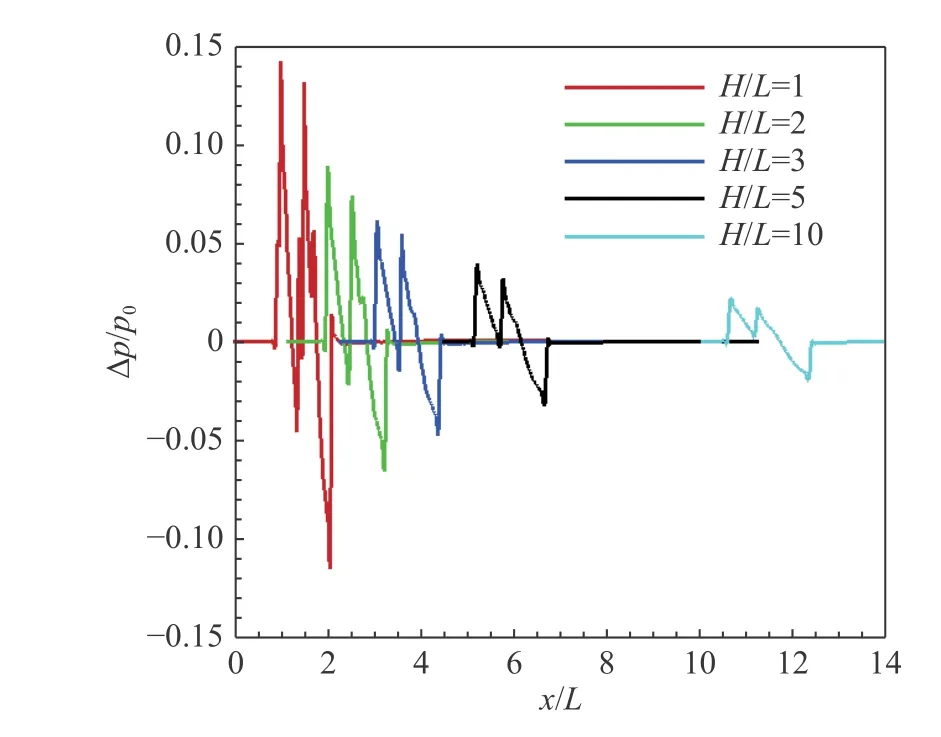
图23 飞行器正下方过压信号随距离机身间距变化情况,H/L = 1~10(Ma = 1.49)Fig. 23 Variation of on-track over-pressure signatures with the distance from the aircraft, H/L = 1~10(Ma = 1.49)
图24给出了以H/L= 3位置处提取的近场过压信号作为输入,采用基于增广Burgers方程远场传播程序,预测得到的近场过压信号传播到远场地面的演变过程,趋势与第3.2.1节情况类似。其中,在HALT=6.0~8.0 km范围内,声爆信号过压峰值衰减最快。声爆波形在离地5.0 km高度附近已完全发展为典型N波形态,然后波形基本保持不变地传播到了地面。
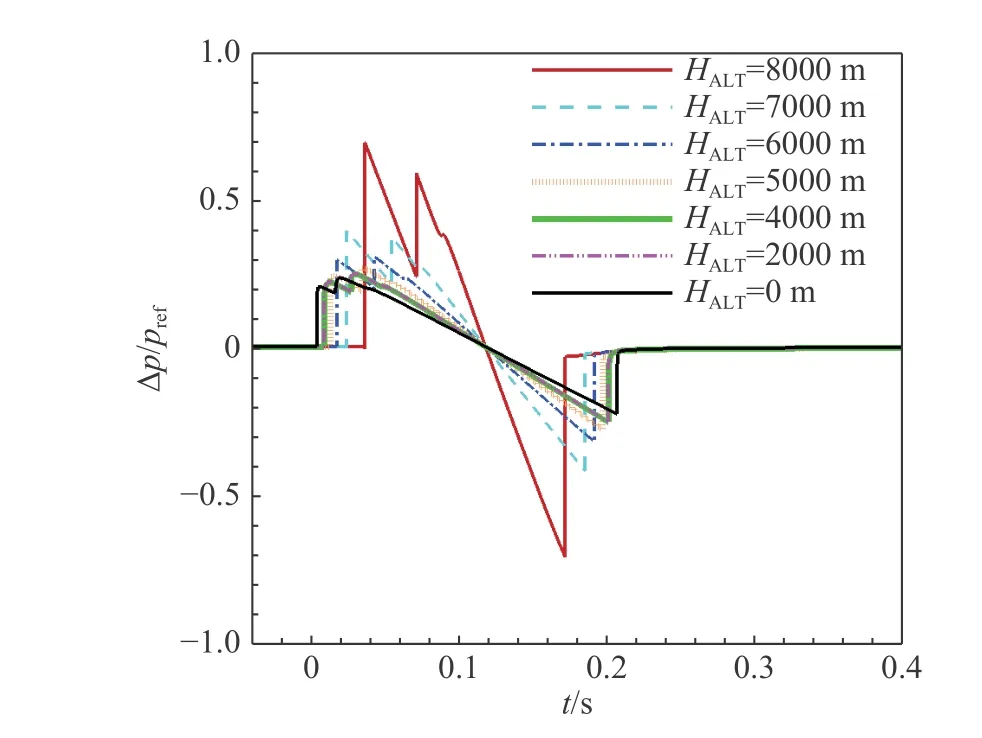
图24 近场过压信号传播到远场地面的演变过程(Ma = 1.49,H/L = 3)Fig. 24 Propagation of over-pressure from H/L = 3 to the ground (Ma = 1.49)
图25给出了在马赫数1.49飞行条件下,距离飞机轴线3倍机身长度处(H/L= 3)的圆柱面上典型周向角声爆信号预测值。图26所示为H/L= 3圆柱面上典型周向角声爆信号传播到地面的预测结果,信号总体变化趋势与3.2.1节类似。其中,被测飞机所产生的声爆信号传播侧向截止点约在周向角52°位置。
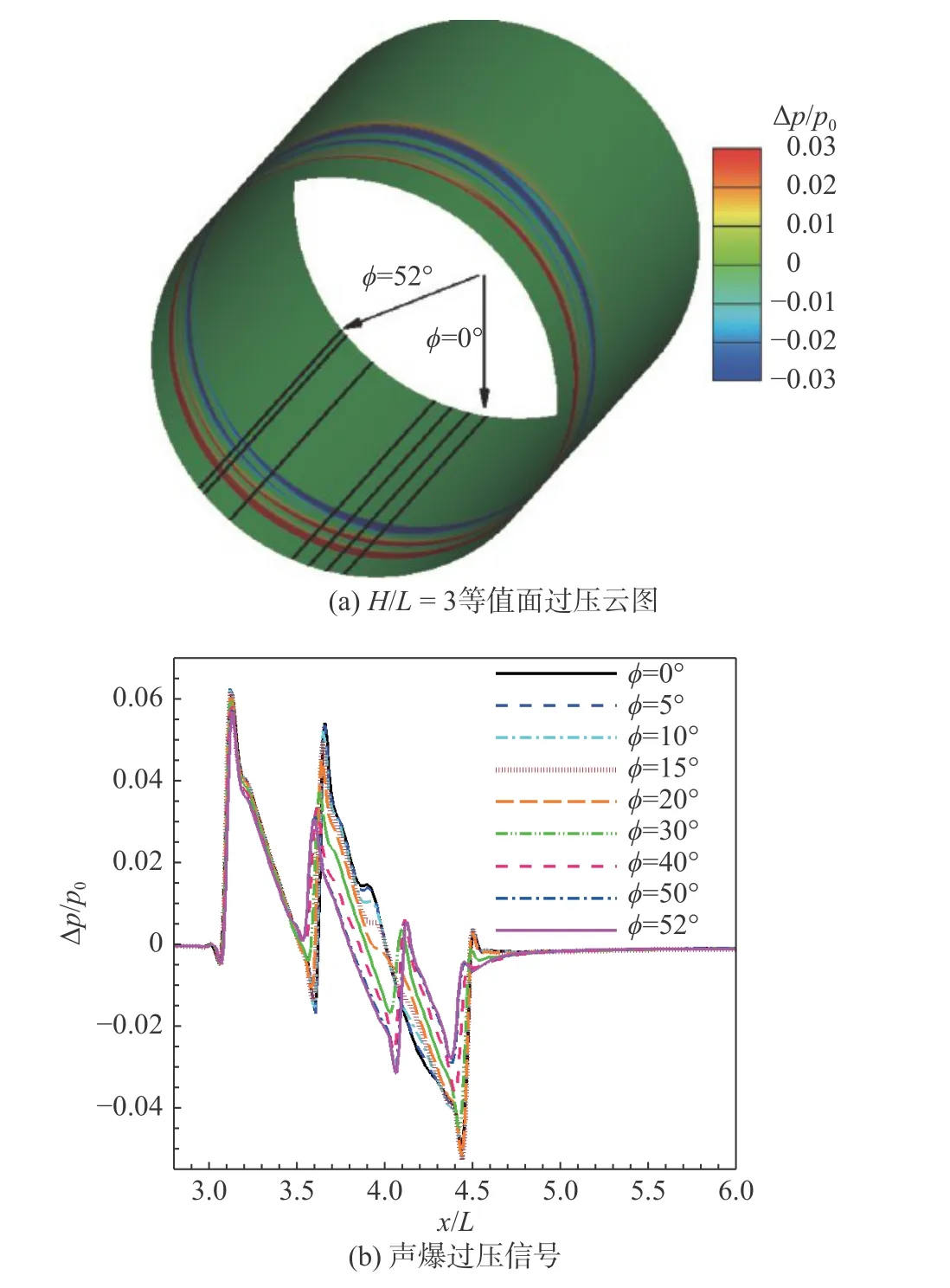
图25 H/L = 3圆柱面上典型周向角声爆信号预测值(Ma = 1.49)Fig. 25 Predicted sonic boom on a cylindrical surface with H/L = 3 at typical circumferential angle (Ma = 1.49)
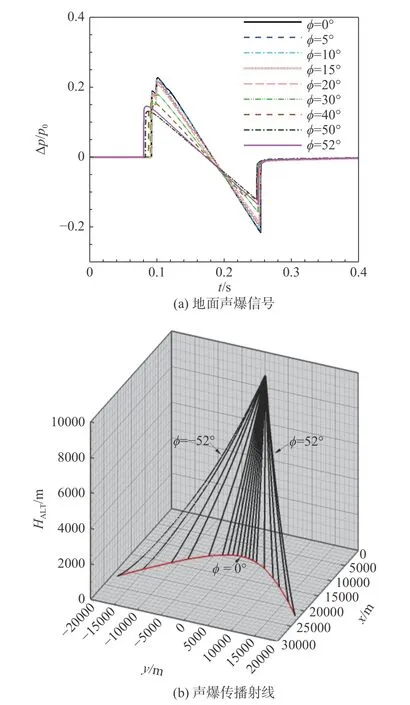
图26 H/L = 3圆柱面上典型周向角声爆信号传播到地面的预测结果(Ma = 1.49)Fig. 26 Predicted ground signatures propagating from typical circumferential angle sonic boom signal on cylindrical surface at H/L = 3 (Ma = 1.49)
3.3.2 数值模拟结果与飞行试验数据对比分析
图27给出了Fx3架次飞行试验过程中,在6#、12#、13#测点对应的飞行试验实测数据与CBoom数值模拟结果的对比。由于飞行器飞行航迹偏离测试阵列较远,导致测得的声爆信号波形与数值预测结果有较大差异。
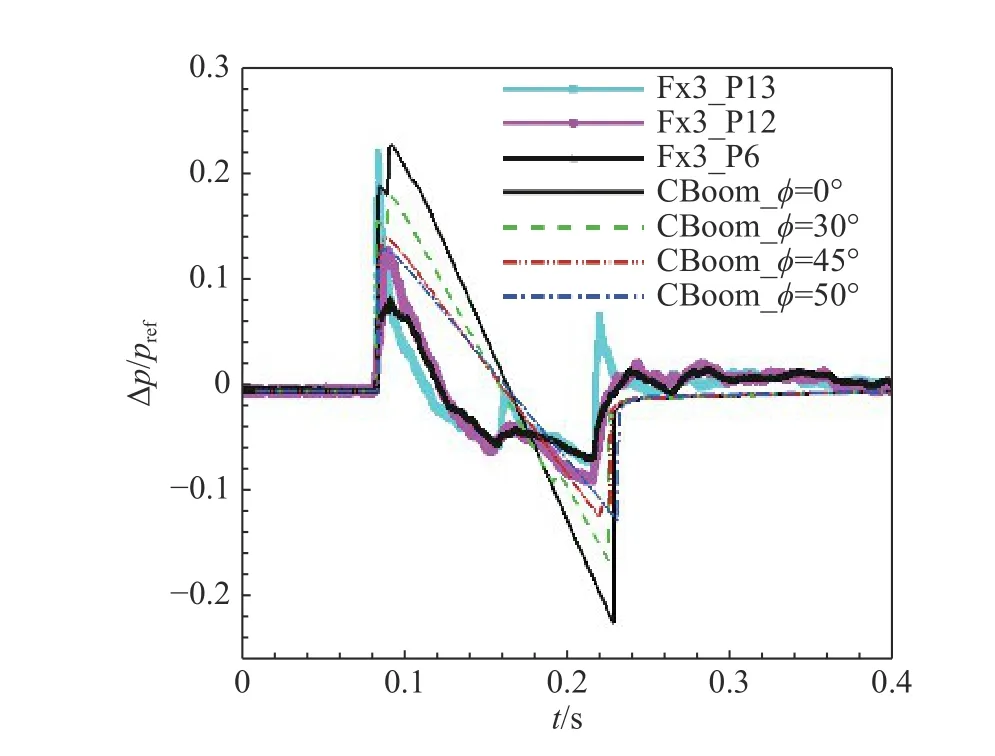
图27 地面声爆过压信号对比(Ma = 1.49)Fig. 27 Comparison of ground over-pressure (Ma = 1.49)
根据Fx3架次飞行的航迹位置,判断测试阵列位于飞行器45°周向角附近。对比12#测点与CBoom预测得到的45°周向角的声爆过压信号,头激波峰值基本吻合,尾激波峰值差异较大;两组声爆信号持续时间比较接近。13#测点的声爆信号波形有较明显变化,极有可能是由于大气扭曲效应所致。
根据Fx3架次飞行试验与预测得到的地面声爆信号,采用史蒂文斯响度法计算了H/L= 3处、不同周向角的近场过压信号传播到远场的地面声爆信号响度级(图28)。飞机45°周向角附近,由飞行试验实测值计算得到的响度级均值为96.0 PLdB,数值模拟预测计算得到的响度级为99.0 PLdB,误差在±3 PLdB以内。

图28 地面声爆信号响度级对比(Ma = 1.49)Fig. 28 Comparison of ground sound levels (Ma = 1.49)
4 结论
开展了国内首次超声速飞机声爆专项测试飞行试验,获得了真实大气条件下的大量重要数据,并结合数值模拟方法对测试结果进行了对比分析。主要结论如下:
1)本次声爆飞行试验成功采集了多组声爆信号以及对应的大气条件和飞行状态数据,实测数据达到试验方案规划设计预期,验证了试验方案的合理性。同时,验证了真实飞机开展声爆试飞的一系列关键技术,如声爆测试飞行轨迹规划技术、地空一体化大型阵列声爆测量技术、可控声爆的超声速飞行技术等。
2)地面声爆信号实测数据与数值模拟预测结果总体趋势吻合良好。被测飞机从测量阵列正上方飞过时,两种方法得到的声爆信号基本形态一致、持续时间较接近,声爆信号头激波、机翼前缘激波峰值相对误差小于5%,验证了所采用的声爆预测方法具有一定的可靠性。
3)地面声爆信号实测数据与数值模拟预测数据在局部特征上有一定差异,主要原因是受计算模型简化、真实大气条件下声爆长距离传播的非线性累积效应等因素的影响。
后续研究建议如下:
1)基于已掌握的飞行试验地面声爆信号测量技术,拓展近、中场声爆信号测试技术,增加对大气、气流(风)等更多气象参数的测量,进一步丰富国内超声速飞行流场测试数据库,为声爆预测评估方法和低声爆设计提供参考。
2)开展低声爆、低成本飞行演示验证,积累丰富的飞行试验数据,为超声速民机设计研发、声爆主观响度评价试验、适航标准建立、航线规划等提供数据支持。
致谢:感谢中国飞行试验研究院测试团队所有成员在本次飞行试验中的辛勤劳动。感谢中国航空研究院王宇航在计算模型处理过程中提供的帮助。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01 06:29:48
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
成都信息工程大学学报(2021年6期)2021-02-12 03:00:48
青年歌声(2019年12期)2019-12-17 06:32:32
探索科学(学术版)(2019年5期)2019-07-13 03:08:23
中国测试(2018年10期)2018-11-17 01:58:50
小哥白尼(趣味科学)(2018年5期)2018-06-21 06:24:32
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
制导与引信(2016年3期)2016-03-20 16:02:01