基于小波兴趣突出点的破损轮胎图像检索方法
2022-08-23 07:16张素智吴玉红
计算机技术与发展 2022年8期
张素智,常 俊,吴玉红
(1.郑州轻工业大学 软件学院,河南 郑州 450007;2.郑州轻工业大学 计算机与通信工程学院,河南 郑州 450007)
0 引 言
近几十年来,随着汽车行业的发展,国内轮胎工业也得到了空前发展,轮胎总产量及总使用量均已居于世界前列。在轮胎使用过程中,由于司机操作不当、路面不平整、载货过重等原因,会造成轮胎某些部位不同程度的破损。工厂需要对破损轮胎进行鉴定以判断出轮胎破损类型。目前,各大工厂使用最多的鉴定方式仍是人工鉴定:根据个人经验观察破损轮胎表面以对轮胎破损类型进行判断。
人工鉴定流程如图1所示。

图1 破损轮胎鉴定及意见返回流程
由图1可知,目前轮胎破损类型的人工鉴定存在诸多弊端:
(1)鉴定流程繁琐、时间长。当司机发现轮胎破损后,鉴定破损类型需要经过二级批发商、省级代理、轮胎工厂三个流程才能把轮胎送到工厂进行鉴定。返回意见往往是相反的过程,这个时间往往是数天,鉴定效率极低。
(2)鉴定标准不统一,主观性强,误差较大。省级总经销商和轮胎工厂均能对破损轮胎进行鉴定,但标准不能完全统一,影响鉴定结果。
(3)鉴定均为人工鉴定,施工环境差,对鉴定人员健康产生巨大伤害,在经济方面对企业可能产生不利影响。
针对以上人工鉴定破损轮胎类型的不足,以计算机智能识别代替繁琐的人工鉴定,提出一种基于小波兴趣突出点的破损轮胎图像检索方法。该方法通过一系列小波变换后提取小波兴趣突出点,在小波兴趣突出点的基础上进行特征提取,并设计了环形二值化颜色直方图,基于小波的兴趣突出点在不同圆环内的分布概率不同,这使兴趣突出点获得了空间分布信息,在小波突出点周围区域内获得的二值颜色直方图也具有了空间分布信息,使得破损轮胎图像检索更加有效。
1 图像检索研究现状
图像检索技术始于20世纪70年代,最开始的检索方式主要通过人工对图像进行标注后进行图像匹配,由于人工的介入,该方法不足之处众多,如图像检索时工作量繁重、检索所需时间长、检索中受人为标注影响大、结果可信度较低等[1-2]。为了弥补人工标注这种检索方式的不足,有学者提出了图像检索的新方法─基于兴趣点的图像检索技术[3-6]。该技术通过检测图像在各个方向灰度有明显变化的兴趣点,在兴趣点的基础上提取图像特征并进行图像检索,避免了人工方式工作量大、检索效率低的不足。
图像检索流程如图2所示。
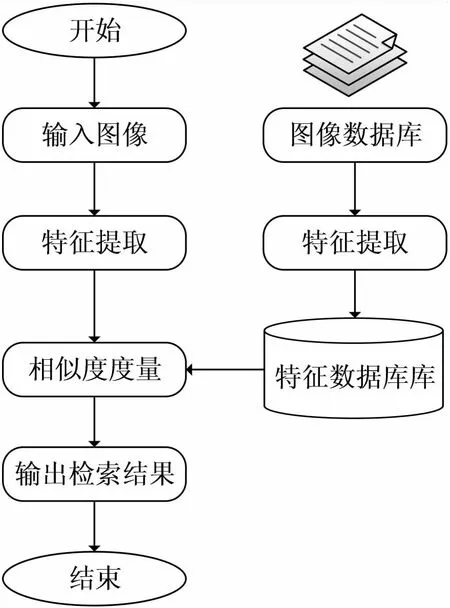
图2 图像检索流程
基于兴趣点的图像检索技术在进行特征提取时,首先要检测出兴趣点。兴趣点是图像中具有特殊性质的像素点,具有计算简单、信息含量高、旋转不变性等优点[7-10]。在检测兴趣点时要使用角检测器,因此兴趣点亦成为角点。然而,当利用局部窗口(角检测器)在破损轮胎图像上进行移动检索角点时,主要面临以下问题:
(1)角点不一定是视觉焦点,当破损轮胎图像较为复杂,角检测器往往会检测到大量角点,但多数角点并不是视觉焦点,造成资源浪费的同时还降低了人们真正关注的兴趣点的检索准确率;
(2)在一整幅破损轮胎图像中,可能由于角点过于集中,只能检测到角点所在的较小区域,破损轮胎图像的其他区域根本没有被扫描。
基于以上两点,且基于兴趣点的图像检索方法仅对图像的颜色直方图的颜色信息总量进行统计,而缺少其颜色的空间位置描述,因此很容易将颜色总量相似但颜色空间分布差异较大的图像错误识别为相似图像,以至于影响图像的检索结果。因此仅利用兴趣点的图像检索技术并不能够很好地应用到破损轮胎图像检索上。理想的图像检索技术应该克服上述缺点,必须能够检索出完整图像内所有感兴趣的特征点,不仅要利用这些特征点的颜色信息,还应采用特征点的空间位置信息,使两者有机结合对破损轮胎图像进行检索。
2 小波兴趣突出点提取
该文的破损轮胎图像检索方法在小波变换后提取图像的兴趣突出点并以其作为视点线索,通过小波兴趣突出点大致确定轮胎的破损区域,利用图像的颜色特征及其空间分布特征对破损轮胎图像进行有效检索。
2.1 兴趣点
兴趣点是图像中具有特殊性质的像素点,其图像中灰度在各方向都有很大变化,当前兴趣突出点检测算子方法众多,但在图像检索领域最常用的还是自相关函数的Harris检测算子[11-12]。
Harris算子的工作思想是:一个局部窗口(即角检测器)在整幅图像中移动,若窗口内区域的灰度发生较大改变,那么就有一个角点存在于区域。
设一幅图像为l(x,y),点(x,y)经过移动(Δx,Δy)后,临近两个点之间的相似性计算公式为:

I(u+Δx,v+Δy))2
(1)
利用泰勒公式将公式(1)展开,能够得到一个二次项函数,如公式(2)所示:

(2)
利用公式(3)计算角点响应函数R,然后根据计算结果得到图像的角点:
R=det(M)-atrace2(M)
(3)
式中,det(M)为M的行列式、atrace2(M)为M的轨迹。当(x0,y0)点的R值大于阈值R0时,则认为点(x0,y0)是一个角点。
2.2 小波变换
20世纪70年代法国科学家J.Morlet首次提出小波变换概念,直到十多年后才有实质进展,数学家Y.Meyer构造出世界上第一个小波基并建立其多尺度分析,有了从0到1的突破和标准的尺度分析,此后研究小波分析的学者越来越多,发展迅速,逐渐形成了各自的体系。
设任一小波函数为φ(x),φ(x)的母函数为具有振荡衰减性质的ψ(x),当f(x)为一维信号函数时,当在尺度为2j时,ψ(x)的伸缩小波系数为ψ2j(x),其中ψ2j(x)=2jψ(2jx);设f(x)采样点的数量为N,则在尺度为2j时f的细节信号等于f与平移伸缩小波的内积:
W2jf(n)=
0≤n≤2jN
(4)
当j为不同的负整数时可以分别利用下式计算出不同尺度的小波系数:
Wf=(W2jf)-Jmax≤j≤-1,Jmax=log2N
(5)
接下来计算尺度为2j的小波系数,在已知尺度为2j+1的小波系数的基础上利用金字塔算法即可求得,即:
0≤n<2jN
(6)
0≤n<2jN
(7)
其中,h是尺度离散滤波器,g是小波离散滤波器,该文所用小波为正交和紧支撑的Haar及Daubechies4小波。
2.3 小波突出点的提取
如上文所述,破损轮胎图像的小波变换定义了在不同尺度下的图像变化信息,在破损轮胎图像检索系统中,将通过从图像中颜色发生明显变化的感兴趣的边缘区域提取出小波兴趣突出点,把该点对应一个具有高阶小波系数的全局变量的颜色变化明显的区域,找相关的高阶小波系数,符合这一特性的点可以在破损轮胎图像合适的分辨率处找到,通过找到的高阶小波系数可以得到一个表述全局变量的特征点。


0≤n<2j+1N
(8)
将公式(6)代入公式(7)中可得:

0≤n<2jN
(9)
对于紧支撑小波来说,h的空间支撑等于g的空间支撑。因此使用公式(8)计算公式(9)的支撑可得:
S(Ψ2j(u-2-jn))=
(10)
滤波器g的大小为2p(对于Haar小波,p=1,Daubechies4小波,p=2)。S(g(n))=[0,2p-1],{k/g(k-2n)≠0}={2n,…,2n+2p-1}。
接下来可得小波系数子集,即公式(11):
C(W2jf(n))={W2j+1f(k),2n≤k≤2n+2p-1}
0≤n<2jN
(11)
由上述得到的小波系数的子集代表2p个信号特征点,小波突出点为这2p个信号特征点中梯度值最大的信号特征点。利用所有小波特征子集系数计算出小波显著特征值,公式为:
0≤n<2jN,-Jmax≤j≤-1
(12)
经过一系列变换,就能找到具有全局特征且小波特征值为最大的小波突出点。
上述分析小波兴趣突出点的提取算法是针对一维数字信号,同理可得二维数字图像。设任意一幅大小为M×N的数字图像为I,由于其小波离散滤波器是一组S(g(x,y))=[0,2p-1]×[0,2p-1],则其对应的小波系数子集为:
(13)
用预设阈值对提取的小波系数子集进行阈值化,以提取所需数量的小波兴趣突出点,如图3为轮胎破损类型为“胎体破裂”的轮胎图像在二值化后提取的小波兴趣突出点。
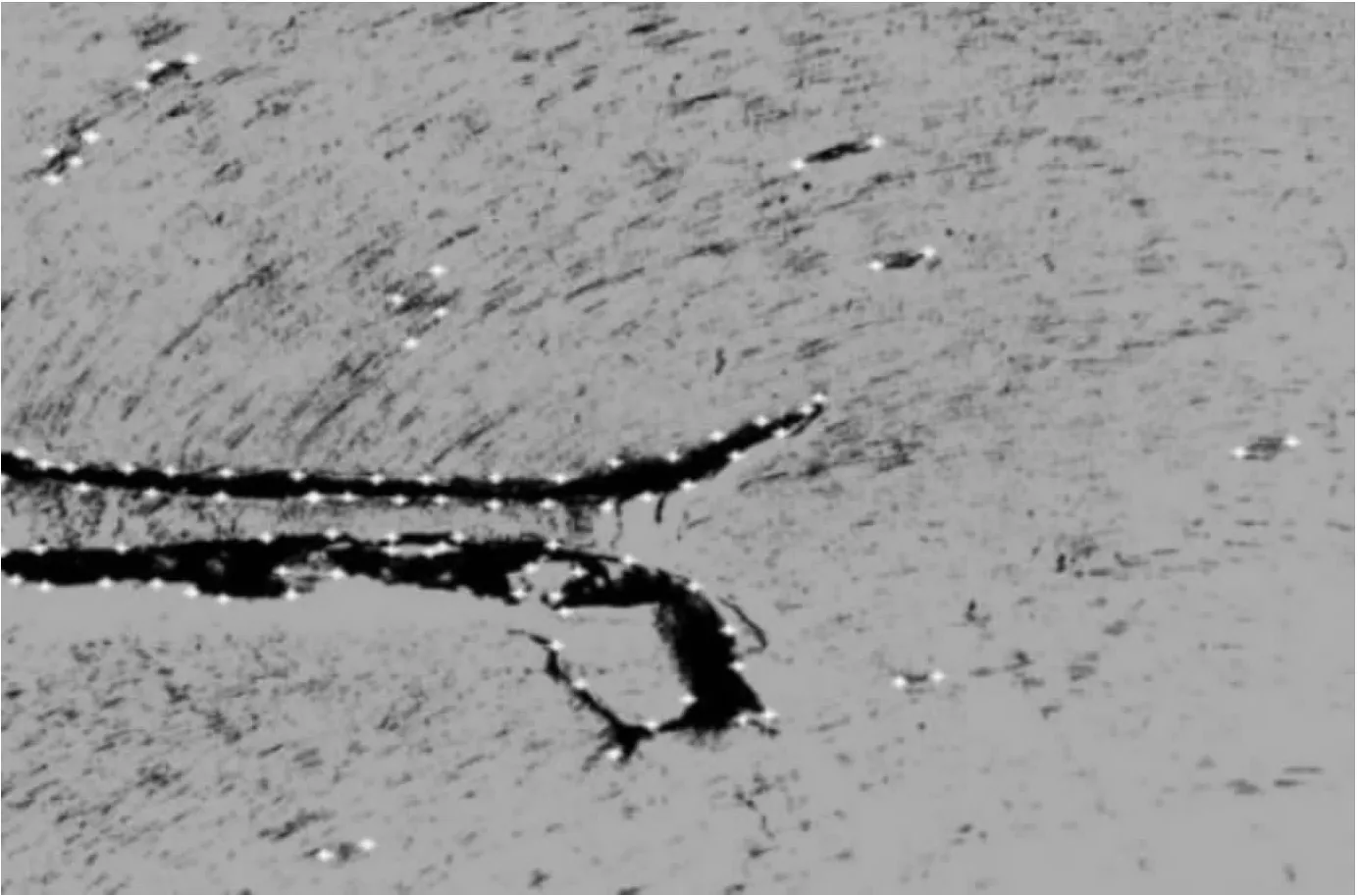
图3 破损轮胎图像提取的小波兴趣突出点
2.4 基于兴趣突出点的环形二值化颜色直方图设计

图4为基于小波兴趣突出点的环形区域示意图。
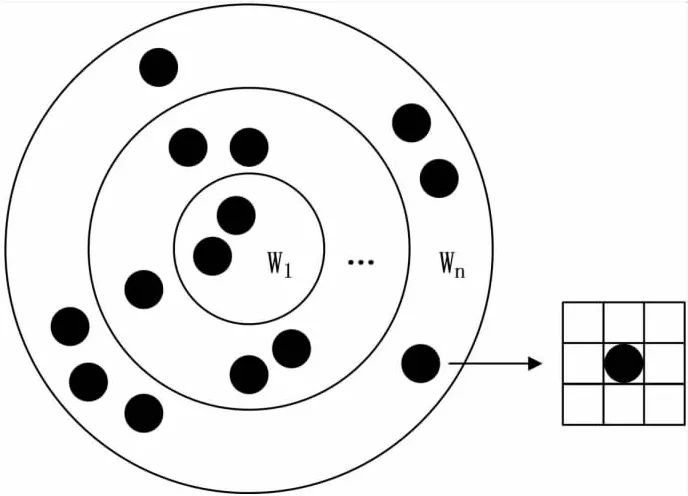
图4 基于小波兴趣突出点的环形区域示意图

(14)
3 相似性度量
图像检索技术经过多年发展,相似度计算方法出现很多,但使用最广泛的是k近邻法(k-nearest neighbor,KNN)。该文便采用k近邻法进行破损轮胎图像的相似性度量,即将待检索图像与破损轮胎图像库中所有图像各个特征逐一进行相似度计算,进而从破损轮胎图像库中找出与待检索图像距离较近的图像,相似度达到预先设置的阈值即认为两幅破损轮胎图像是相似的,大量的实验表明KNN是简单有效的方法[13-15]。
待检索图像x与破损轮胎图像库中现有图像l的相似度计算公式如下:
(15)
式中,SAkl是案例l的k特征的重要性(权重);xk是新案例x的k特征,lk是现有案例l的k特征;EDk为案例库中所有案例的k特征的标准偏差。
4 实验结果及分析
为了验证该文所提图像检索方法的有效性,在相同软硬件环境下将基于小波兴趣突出点的破损轮胎图像检索方法与基于卷积神经网络的图像检索方法进行对比。利用Matlab进行仿真实验,实验的环境是Windows10系统,64位操作系统,使用的硬件环境是Intel i5。实验图像由轮胎工厂提供,在其提供的破损轮胎图像中选出破损规范的图像建立的破损轮胎图像数据库,库中包括500多幅破损轮胎图像,这些轮胎图像根据轮胎工厂鉴定轮胎破损类型的规则分为4个子类,包括胎空、胎肩啃伤、胎体破裂和胎体缺失,每个子类包含多幅破损轮胎图像。
该文将使用破损轮胎图像检索准确率和查全率来衡量算法的性能优劣,事先将建立的破损轮胎图像库根据轮胎的破损类型分为四类,破损轮胎图像检索的准确率和查全率分别用PT和R表示,定义公式为:
(16)
(17)
式中,n为检索出正确的轮胎破损类型图像的数量,T为检索出破损轮胎图像的总数量,并以相似度最高的图像作为检索出的最相似破损轮胎图像,并输出该破损轮胎图像相应的轮胎破损类型。这样就鉴定出待检索破损轮胎图像的相应破损类型;公式(17)中m为检索得到的图像数量,N为图像总数量。
利用文中算法和卷积神经网络算法分别计算出P20、P30、P50的破损轮胎图像检索准确率,详细如表1所示。
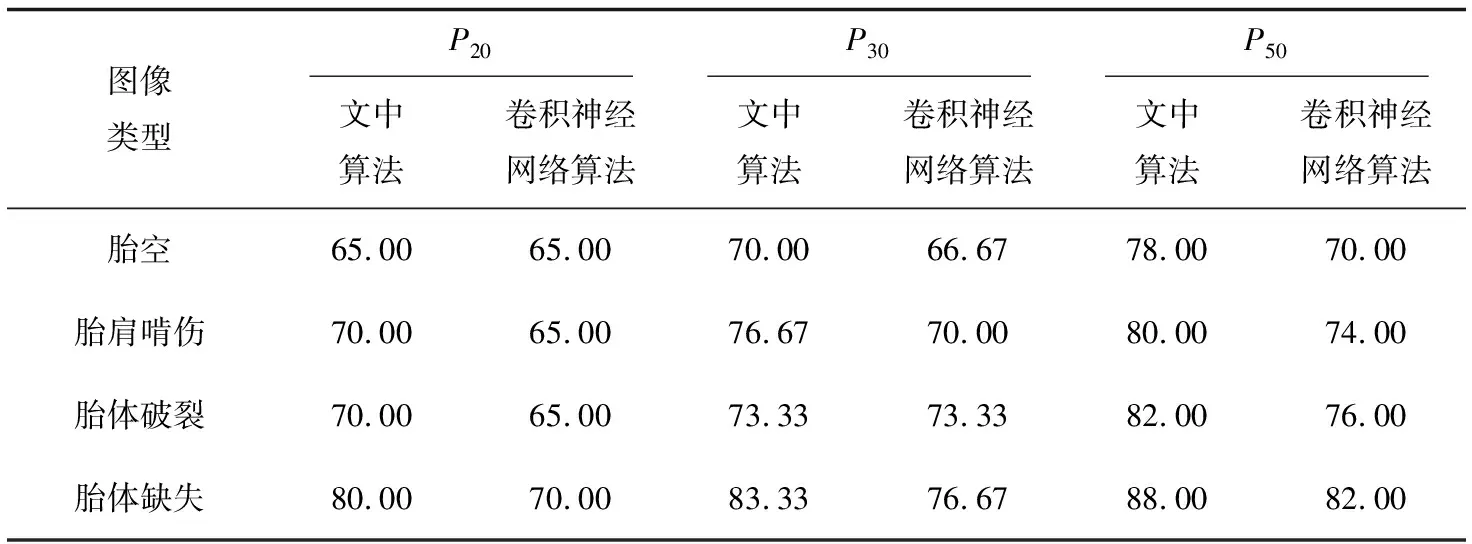
表1 文中算法和卷积神经网络算法的检索准确率 %
实验结果表明,无论是何种轮胎破损类型及P为何值时,文中算法的检索准确率均优于卷积神经网络算法;还可以看到不同的破损类型的轮胎图像检索准确率并不相同,但都随着破损轮胎图像检索数量的增加,所有破损类型的识别率均有所提高,在P=50时文中算法的破损轮胎图像检索准确率总体已经达到80%以上。因此当样本及检索数量足够大时,文中算法能够取得令人满意的检索准确率。
同时还计算出基于小波兴趣突出点的图像检索方法和卷积神经网络算法在P=50时对破损轮胎图像检索的查全率,具体如表2所示。
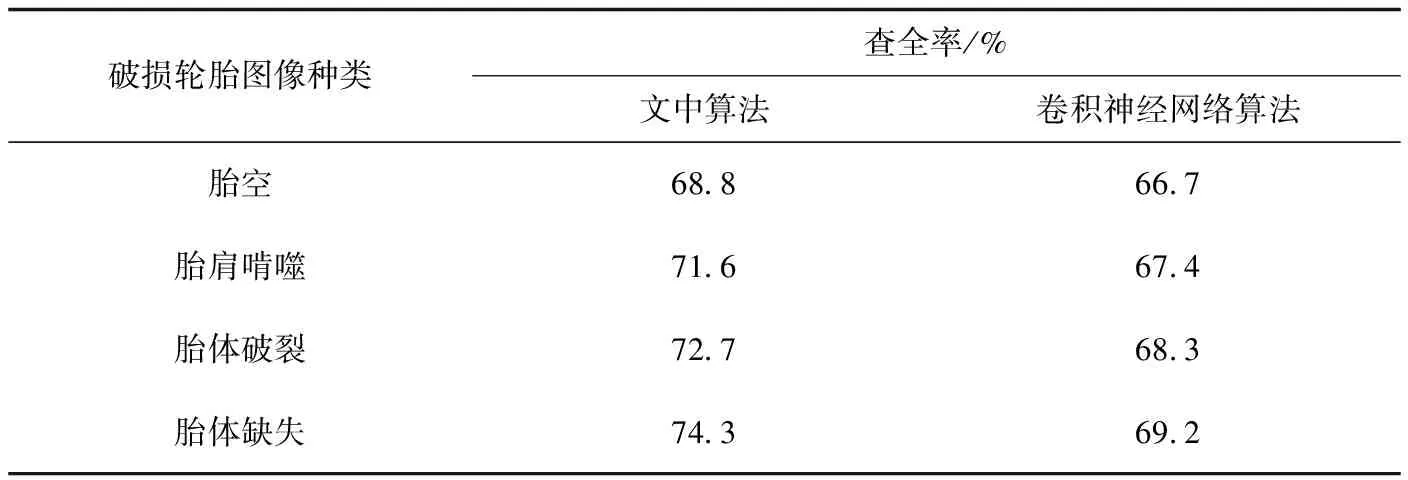
表2 文中算法和卷积神经网络算法在P=50时对破损轮胎图像的查全率
从表2可以看到,在P=50时,文中算法在四类轮胎破损类型中的查全率均高于卷积神经网络算法,查全率提升了近4%;轮胎不同破损类型检索的查全率有所差异是不同破损类型的轮胎图像复杂度不同和每幅破损轮胎图像提取的小波兴趣突出点数量不同造成的。
5 结束语
针对人工鉴定破损轮胎类型的不足,提出了一种基于小波兴趣突出点的破损轮胎图像检索方法。传统的图像检索方法利用兴趣点进行图像检索时仅统计颜色直方图的各种颜色的量的多少,而忽略了颜色直方图中每种颜色的分布方式,缺少颜色的相关空间位置信息,以至于混淆各类颜色统计数量相同而颜色空间分布不同的图像,最终影响图像检索的准确率。该文提出的破损轮胎图像检索方法是在小波兴趣突出点的颜色信息的基础上添加了以小波兴趣突出点为中心、以λ×λ为邻域的位置信息,在提取图像的颜色特征的同时也获得了颜色的空间分布信息,一定程度上弥补了传统基于兴趣点图像检索方法的不足。经过文中算法与基于卷积神经网络的图像检索算法在检索破损轮胎图像方面的实验结果表明,文中算法在检索破损轮胎图像方面具有更高的检索准确率和查全率,同时能够检索出破损轮胎图像的相应破损类型,这是其他图像检索算法所不具备的功能。
当然该算法也有一些不足,如使用的破损轮胎图像包含干扰信息,轮胎上的异物及其固有的花纹与字符在破损轮胎图像的小波兴趣突出点提取过程产生了负面影响以致影响破损轮胎图像检索准确率。后期将着重研究如何减小此类干扰信息对破损轮胎图像检索的不利影响。
猜你喜欢
科技风(2021年19期)2021-09-07
读书文摘(下半月)(2021年3期)2021-06-28
健康之家(2021年19期)2021-05-23
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
健康体检与管理(2021年10期)2021-01-03
技术与创新管理(2020年5期)2020-10-09
商情(2020年24期)2020-06-30
早期教育(家庭教育)(2020年12期)2020-02-08
科学与财富(2019年27期)2019-10-25