
基于机器学习水轮机汽蚀自动监测研究
2022-08-19 02:38刘苏程
广东水利水电 2022年8期
刘苏程
(惠州市白盆珠水库工程管理局,广东 惠州 516341 )
1 概述
水电是世界上最大的可再生能源,许多国家严重依赖水力涡轮机产生的能源,占发电量的一半以上。与泵、船舶和阀门等其他液压机械一样,由于涡轮机的液体会形成蒸汽气泡并快速坍塌,水轮机也容易受到汽蚀造成的损坏[1-2]。蒸汽气泡或汽蚀的形成是由于旋转叶片、尖锐曲线或湍流引起局部压降而形成的,是一种潜在的极具破坏性的复杂现象。当蒸汽腔坍塌时,会辐射高能声压波,导致机械表面形成凹坑和侵蚀涡轮机材料,从而缩短水轮机转轮的寿命,需要昂贵的维修费用[3-4]。尽管当前水轮机的设计有所进步,但汽蚀造成的损坏仍然是水轮机故障的主要原因之一,国内外当前对这一现象展开了大量研究,取得了较好成果。
冯超[5]为了解决机组汽蚀严重的问题,展开了对转轮抗汽蚀方法的研究,提出了一种高分子材料和柔性聚氨酯复合喷涂的方法; 陈伟[6]提出了转轮汽蚀及叶片出水边修型的处理方案;陈汉辉等[7]采用表面粘结钢板并应用自锁锚杆锚固取代传统的钢板螺栓锚固的处理方法减缓转轮室内壁因汽蚀和水流冲刷严重磨损;李照等[8]阐述了中水头混流式水轮机转轮进水边的汽蚀问题,并根据附面层吸附原理,对已投入运行的机器提出了几种解决办法;习爱龙[8]通过采用堆焊技术对杨凌水电职能轴流式水轮机转轮汽蚀进行了处理,明显提高了机组的出力,延长了转轮使用寿命。此外还有部分学者通过现场分析和简单的检测技术对转轮汽蚀现象进行了分析[9-12]。
从以上文献分析可以得出,大多数研究都是通过改进表面涂层材料和改进构件对汽蚀现象进行研究,而少有研究对汽蚀产生的转轮损伤进行提前监测预警。为了发展更好的水轮机腐蚀空化的检测方法,本研究结合了多种机器学习方法,先采用加速度计以及声发射传感器对转轮进行监测,之后利用均方根(RMS)和平方根(MD)振幅计算方法来提取输入数据特征值,最后采用随机森林方法(RF)、决策树(DT)、人工神经网络(ANN)、支持向量机(SVM)和logistic回归5种机器学习算法,对RMS和MD数据进行了对比分析,得到了最佳监测精度,研究成果可为相关工程提供参考。
2 传感器选取和布置
本文将汽蚀检测分为3个部分:① 传感器类型选取;② 传感器布置;③ 基于机器学习信息分析处理。用于汽蚀诊断最常见传感器是加速度计以及声发射传感器,前者会产生与加速度成比例的信号,后者产生与穿过材料的小应力波振幅成比例的信号。这两种传感器都基于压电传感元件,能够记录高频事件,本文采用这两种。用于汽蚀诊断的加速计通常具有3~40 000 Hz的线性频率响应,而使用的声发射传感器在40~400 kHz之间响应良好。为了利用高频传感器,信号记录设备必须能够在1 MHz左右的高采样率下记录数据。汽蚀诊断不太常用的传感器包括水听器和高频压力传感器,该装置对2~180 000 Hz之间的压力事件较为敏感。
在大多数情况下,接近式探头用于检测尾水管涡流或非汽蚀相关故障(如水轮机轴不平衡或错位)的典型低频事件,本文监测的对象为轴流转桨式水轮机(如图1所示)。监测水轮机汽蚀的传感器位置包括:① 上下涡轮轴承;② 进口导叶(也称为导叶)的阀杆;③ 尾水管壁。在实验装置中,传感器有时连接到其他位置,包括水轮机壳体、试验台架或直接连接到水轮机主轴。

图1 轴流转桨式水轮机示意
3 数据驱动特征值选取
在机器学习领域,特征选择是从原始输入数据中选择或创建用作预测因子的变量子集的过程。在本文中,选择的特征是用于预测水轮机何时发生汽蚀的频率范围。特征值的选择有许多复杂的方法,在此采用了一种基于振动信号处理和水轮机汽蚀特性知识来创建和选择特征的方法。
1) 收集缓降数据
因为水轮机在其最大和最小功率输出运行条件之间是线性过渡的,当使用接近式探头进行汽汽蚀检测时,用于收集数据的最小采样率应大致基于叶片通过频率或导叶通过频率中较高者,水轮机通过缓降所需的时间(以秒为单位)将影响收集的数据量、频率分辨率以及创建训练数据可用的总点数。本文在研究中观察到,60~90 s的缓降可以产生足够的数据,通过对现有数据进行逐步抽取,可以估计出最小实际下降时间。
2) 计算每个频率的方差
此步骤在缓降数据中搜索振幅随时间显著变化的振动频率范围,在水轮机减速期间,水轮机的转速保持不变,唯一变化的变量是发电负荷和流经水轮机的水流;可以进一步分析与水流有关的振动频率,以确定是否与汽蚀有关。
3) 选择频率范围
在汽蚀检测方法中选择的数据是根据1个或多个频带内接近探头振动的均方根(RMS)振幅计算的。基于RMS计算和频率滤波器的数据已被证明对水轮机和水泵中的汽蚀检测有效。用于RMS计算的频带基于步骤2中创建的方差频谱。图2给出了安装在不同位置的两个传感器(见图1)测量的水轮机通过斜坡下降时的均方根振幅。当在水轮机中使用接近探头进行汽蚀检测时,有3个频率区域值得注意:① 低于运行速度的振动频率受尾水管漩涡、冯·卡门漩涡脱落或其他水力不稳定性的影响;② 在运行速度下增加的振动频率也可能是水力不稳定的指标(运行速度振动也可能受到其他类型故障的影响,包括不平衡、不对中和轴承磨损);③ 叶片和导叶处的高频振动。
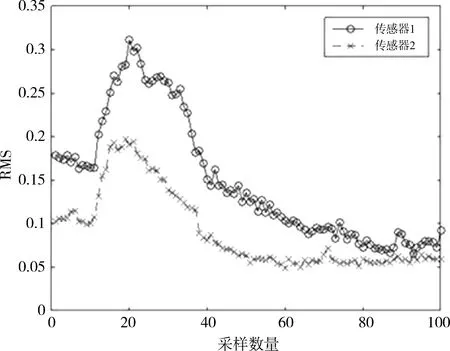
图2 传感器测量的水轮机通过斜坡下降时的均方根振幅
4 基于机器学习汽蚀监测
4.1 机器学习方法
人工神经网络属于一种广泛使用的算法模型,该模型结合人脑神经元特征进行设计,拥有自主学习和自适应的特点,通过神经元之间的关系实现对信息的处理。各个神经元以变量x作为输入,然后对y-hat值进行计算。已知训练集中的样本数目为m,x代表某个样本各个特征的取值,g代表非线性激活函数。另外,各个单元存在偏差(b)、权重向量(w)两个需要进行学习的参数。在迭代过程中,需要基于当前的w对x的加权均值进行计算,然后将b加上,并将得到的结果代入到g中,具体的计算公式如下所示:

(1)
yk=g(sk)
(2)
在上述公式中,角标k表示第k个神经元,x1,x2,…xn为输入参数向量,表示未知量个数;w1,w2,k,…,wn,k为各参数权重;bk为阈值;sk为第一次进行权重分配后的输入值;g为非线性激活函数;yk为输出值。 图3为神经网络模式示意。

图3 神经网络模式示意
支持向量机是一种基于统计学的最先进的神经网络方法。背后的基本概念是超平面,支持向量机在高维空间中构造一个超平面或一组超平面,用于分类。支持向量机算法的基础是最大间隔分类器,最大间隔分类器虽然很简单,但不能应用于大部分数据,因为大部分属是非线性数据,无法用线性分类器进行分类,解决方案是对特征空间进行核函数映射,然后再运行最大间隔分类器。 支持向量机的核函数映射是一种扩展特征空间的方法,核函数的核心思想是计算两个数据点的相似度。核函数的度没有限制,使用度大于1的内核可以得到更灵活的决策边界。图4为支持向量机算法图解。
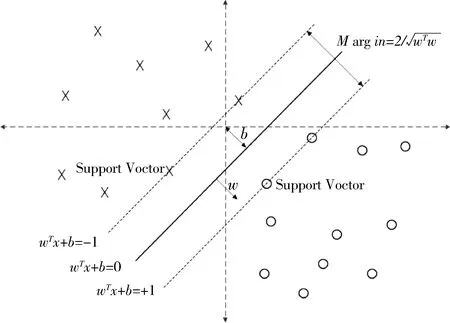
图4 支持向量机算法图解示意
决策树(Decision Trees,DT)是一种监督机器学习算法,该算法根据数据的特征进行逐层划分直到划分完所有的特征,这一过程类似于树叶生长过程。决策树算法可用于解决分类和回归问题,在实际数据分析中有着广泛的应用,比较经典的决策树算法有CART、ID3等等。DT对数据采用自上而下的方法,在给定数据集的情况下,尝试对数据之间相似性进行分组和标记,并寻找最佳规则来对它们之间对应的不同的标签进行分类和回归分析,直到达到最大的精度。
随机森林由Leo Breiman(2001)提出的一种分类算法,它通过自助法(bootstrap)重采样技术,从原始训练样本集N中有放回地重复随机抽取n个样本生成新的训练样本集合训练决策树,然后按以上步骤生成m棵决策树组成随机森林,新数据的分类结果按分类树投票多少形成的分数而定。其实质是对决策树算法的一种改进,将多个决策树合并在一起,每棵树的建立依赖于独立抽取的样本。单棵树的分类能力可能很小,但在随机产生大量的决策树后,一个测试样本可以通过每一棵树的分类结果经统计后选择最可能的分类。
logistic回归模型的主要目标是基于训练数据集上提取的知识预测新给定数据的标签。逻辑回归可以分为两种类型:简单逻辑回归和多元逻辑回归。简单逻辑回归用于预测类别值,因为它是分类的,并且只有两种可能的结果,然而,多元逻辑回归可以用来预测由3个或更多可能结果组成的类值。针对某一任务数据集,找一个合适的预测函数,一般表示为h函数,即分类函数,用来预测输入数据的判断结果;其次构造一个损失函数,该函数表示预测的输出与训练数据类别之间的偏差,可以是二者之间的差或者是其他形式,综合考虑所有训练数据的损失,将损失函数求和或求平均,记为J函数,表示所有训练数据预测值与实际类别的偏差。
4.2 监测结果分析
图5表示本次测试传感器数据通过MD和RMS处理后的频率范围,表1为基于平方根(MD)振幅对水轮汽蚀的监测精度,表2为基于均方根(RMS)振幅对水轮汽蚀的监测精度。由表1、表2可知,对于MD振幅,决策树方法相比其他算法监测精度都好,平均准确率为76.87%,随机森林方法次之,监测准确率为72.67%。相比而言逻辑回归方法监测出来的结果精度最低,仅为65.73%。而对于RMS震幅,从表2可以明显看出,在所有机器学习方法中,随机森林(RF)的监测性能最好,平均监测精度达到了88.80%,其次是决策树和支持向量机,监测精度分别为83.63%和74.13%,ANN和LR回归的准确性较低,但ANN在数据集D1上的性能优于SVM。从上表还可看出,数值结果清楚地表明了基于均方根(RMS)振幅进行数据预处理的有效性要明显高于平方根(MD)振幅,大大增大了水轮机故障监测精度。

图5 传感器数据频率范围
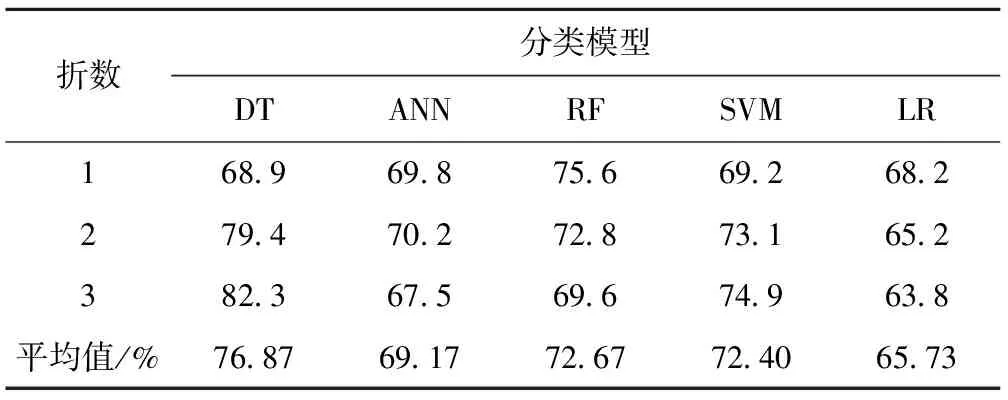
表1 基于平方根(MD)振幅对水轮汽蚀的预测精度
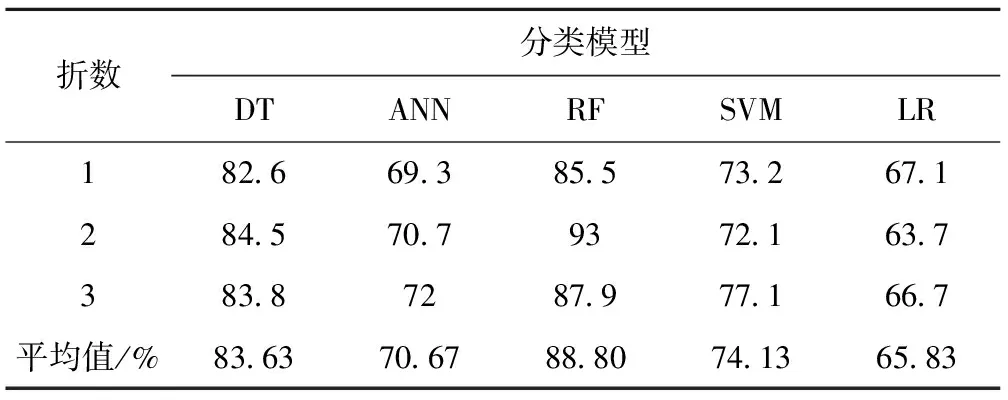
表2 基于均方根(RMS)振幅对水轮汽蚀的预测精度
5 结语
本研究结合了多种机器学习方法,先采用加速度计以及声发射传感器对转轮进行监测,之后利用均方根(RMS)和平方根(MD)振幅计算方法来提取输入数据特征值,最后采用随机森林方法(RF)、决策树(DT)、人工神经网络(ANN)、支持向量机(SVM)和logistic回归5种机器学习算法,对RMS和MD数据进行了对比分析。结果表明对于MD振幅,决策树方法相比其他算法监测精度都好,平均准确率为76.87%,而对于RMS震幅,随机森林(RF)的监测性能最好,平均监测精度达到了88.80%。此外基于均方根(RMS)振幅进行数据预处理的有效性要明显高于平方根(MD)振幅,大大增大了水轮机故障监测精度。
猜你喜欢
大电机技术(2022年3期)2022-08-06
环境技术(2022年1期)2022-03-21
轻兵器(2022年2期)2022-02-23
科技创新与应用(2021年17期)2021-06-29
——“AABC”和“无X无X”式词语
小学生学习指导(中年级)(2021年3期)2021-04-06
水电站机电技术(2020年9期)2020-10-09
水电站机电技术(2020年7期)2020-08-04
飞天(2019年6期)2019-07-08
宇航学报(2018年7期)2018-08-10
新高考·高二数学(2015年2期)2015-05-27
