
临近空间柔性飞行器输出反馈控制方法研究
2022-08-19 02:01:34王民泰曹云峰周嘉麒
指挥控制与仿真 2022年4期
王民泰,曹云峰,周嘉麒
(南京航空航天大学航天学院,江苏 南京 210000)
1 柔性飞行器的发展
1.1 临近空间和柔性飞行器
临近空间(Near Space,简称NS)是介于航空领域与航天领域之间且尚未被充分开发利用的空间领域,又被称为近空间、亚轨道空间、空天过渡带等。该空间距地面20 ~100 km,包含大气平流层、中间大气层、部分电离层三个区域,该高度高于传统航空设备等飞行器的最高飞行高度,但是低于卫星、空间设备等航天器的轨道运行高度。临近空间具有平均风速低,气象条件稳定,太阳光辐照强度大,湿度小,阻力小,电磁特性优良等优点。
临近空间大气稀薄的环境致使飞行器在该区域很难获得较大的升力,因此,航空飞行器无法飞行到该空间,而无动力轨道航天器在该空间又会因为大气阻力的黏滞作用而迅速坠落。柔性飞行器因具有柔性机翼,能够获得较大的升力,因此能在该空间长期飞行,进行侦察、监视、跟踪等活动。
随着世界各国军事科技的飞速发展,低空飞行的飞行器安全性不再得到保障。为能继续执行情报收集、目标侦察、网络通信等军民活动,各国迫切需要能够避免地面炮火攻击,进行高空长时间飞行的飞行器,于是,高空长航时飞行器(High Altitude Long Endurance,简称HALE)应运而生。为了完成高难度的飞行任务,需要HALE的机翼具有大展弦比,进而获得较大的升阻比,并且,机身的轻薄特点使得机翼的柔性较大,所以,这类具有大展弦比机翼的高空长航时飞行器又被称为柔性飞行器(Flexible Aircraft,简称FA)。
1.2 飞翼布局柔性飞行器
柔性飞行器具有大展弦比特点,与普通飞行器相比,其优势主要表现为结构简单,重量轻,可高空长时间航行及多任务执行等。大柔性飞行器有以下三种布局:常规翼布局、联接翼布局和飞翼布局。
常规翼布局柔性飞行器与固定翼飞行器结构类似,但其机翼相比较于固定翼飞行器机翼更加细长,如图1所示。其优点是展弦比大,质量轻;缺点是机身阻力大,不能完成灵活性较高的任务。

图1 柔性常规翼飞行器
联接翼布局柔性飞行器通过后掠前翼与前掠后翼两部分联接组成,如图2所示。其优点是结构强度大,飞行稳定,飞行器框架结构小,灵活性强,巡航速度快,具有良好的自然姿态恢复能力和良好的气动静稳定特性,升阻比也较高;其缺点是在结构、气动弹性、控制方面存在耦合,情况复杂,在控制律设计方面难度较大。

图2 柔性联接翼飞行器
飞翼布局柔性飞行器是柔性飞行器设计采用最常见、历史最悠久的布局,如图3所示。其优点是重量轻,飞行阻力小,升力面大,飞行获得的升力大。此外,在隐蔽性方面,相比较于其他两种布局,也有一定的优势;其缺点是飞行器纵向稳定性较差,容易导致飞行器出现静不稳定的情况。此外,其存在刚体结构和气动弹性强耦合的特点,导致其控制系统设计难度较大。

图3 飞翼型柔性飞行器
本文针对一类飞翼布局柔性飞行器的纵向动力学模型,设计了一种自适应输出反馈控制器。借助控制器中的观测器和修正闭环参考模型对柔性飞行器的不确定性进行估计,总体上保证了存在较大参数不确定时的稳定性和跟踪性能。
2 柔性飞行器纵向动力学模型
2.1 纵向动力学方程
飞翼布局柔性飞行器的纵向运动方程表示为
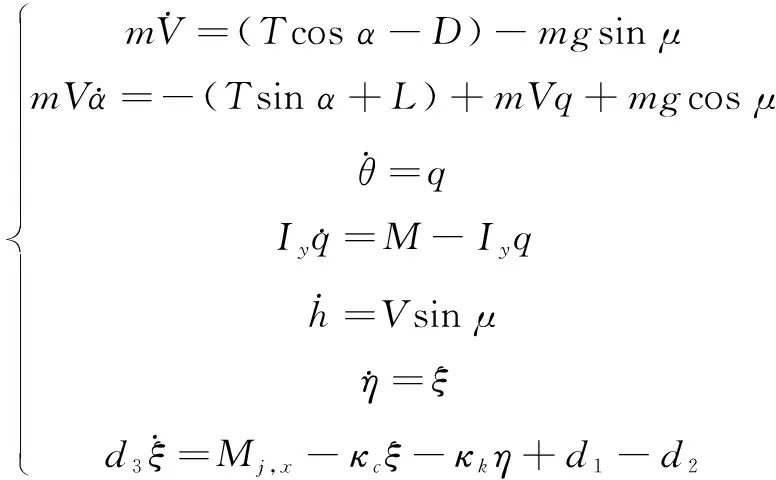
(1)
其中,为高度,航迹倾斜角=-,并且
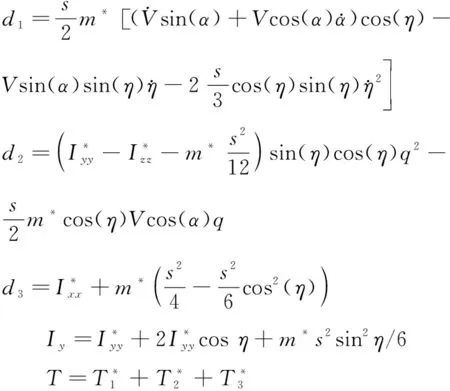
(2)

2.2 具体研究对象
沈华勋用三个刚性翼和弹性铰链构造了一个柔性飞行器模型,以此来逼近柔性飞行器的复杂非线性特性。本文的研究对象是飞翼布局柔性飞行器,如图4所示,柔性飞行器共有3个刚性翼,每个刚性翼的长度和重量都一样,总质量为1 459 kg,每个刚性翼都有一个产生推力的螺旋桨、一个沿着主翼尾部运行的副翼和一个连接在吊杆末端的升降舵。

图4 柔性飞翼型飞行器
2.3 配平分析
本文对飞翼布局柔性飞行器进行配平分析。公式(1)中的非线性动力学表示为
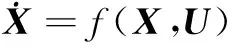
(3)
式中,是状态向量,是控制输入。
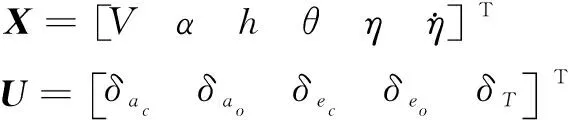
(4)
式中,和分别表示副翼中心和副翼外侧,=和=,其中=1,3。下标,分别表示升降舵中心和升降舵外部。控制输入=,=1,2,3。线性动力学定义为

(5)
式中,=-,=-,调整状态和调整输入满足0=(,),是线性化误差,和分别表示为:

(6)
公式(3)中的非线性柔性飞行器动力学在风速为9 m/s、高度为12 000 m时线性化,二面角在0至45°之间变化,配平结果如图5所示。
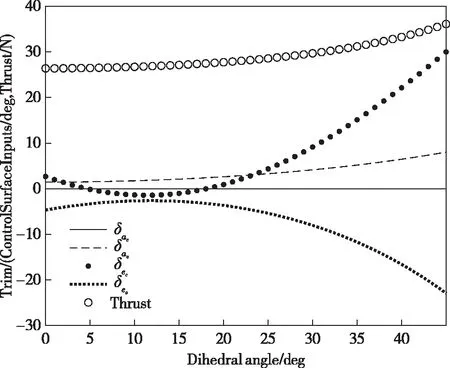
图5 柔性飞行器配平结果
3 柔性飞行器输出反馈控制
柔性飞行器运行在临近空间区域内,在执行飞行任务的过程中,飞行环境十分复杂,使得其气动和环境参数会发生巨大的改变;极高的飞行速度和快速的燃料消耗会导致飞行器的惯性参数和结构参数发生变化;对柔性飞行器飞行状态的建模研究不充分,以及实验数据不完备等因素,使得现有的柔性飞行器的数学模型中不可避免地存在诸多不确定性因素。这些不确定性因素会给飞行器动态特性分析和控制系统设计带来不利的影响。所以,有必要研究模型参数不确定时的飞行控制问题。
3.1 输出反馈控制发展背景
自适应输出反馈控制器因其能够控制具有不完全状态测量对象的优点而被广泛研究。通过观测器生成状态估计,并使用该估计来执行类似状态反馈的控制。基于观测器的控制器已广泛应用于飞行器控制研究,对标称设备模型的控制性能优异。当线性控制器设计有足够的稳定裕度时,可以容忍一定量的模型不确定性。自适应控制在参数不确定时具有良好的稳定性能,因此可作为线性控制器的改进方法被研究。
自适应控制器是基于飞行器传递函数矩阵的经典方法,但通常需要知道飞行器的Hermite矩阵,并使用非最小观测器和参考模型,包含大量积分器,致使控制性能缓慢。与经典方法不同,有文献提出了一种基于状态空间表示的新方法,使用最小观测器来生成底层状态估计,并将状态估计用来实现反馈控制,达到参数自适应。并引入闭环参考模型(Closed-loop Reference Model,简称CRM),将最小观测器作为参考模型。
本文在具有二阶致动器的柔性飞行器动力学模型上进行仿真验证,该模型可以充分反映柔性飞行器中的参数不确定问题。通过采用带有CRM的输出反馈控制器,选用高阶滤波器代替标准的一阶微分方程,进行参数自适应的自适应律设计,设计出针对具有不确定参数的柔性飞行器的自适应输出反馈控制器。
3.2 线性柔性飞行器模型
将非线性模型围绕平衡点进行线性化,从而得出线性飞行器模型。
(7)

3.3 设计自适应输出反馈控制器
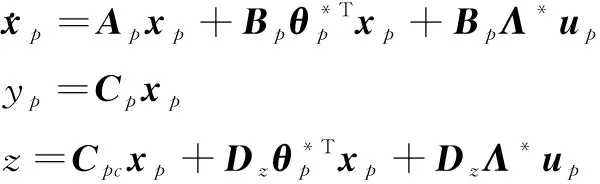
设计自适应输出反馈控制的第一步是选择参考模型,其使用修改的闭环参考模型(CRM):

=,=
(8)
式中,=-,其中,∈×为不包含不确定性的系统设计的标称反馈增益矩阵,使用线性二次调节器(Linear Quadratic Regulator,简称LQR)技术。()、()是稍后要设计的函数。是的参考输出轨迹,=-是跟踪误差,CRM误差反馈增益设计为

(9)
其中,

(10)

(11)
()和()设计为:

(12)

(13)
式中,(())定义为:

(14)

(15)
通过从控制对象模型公式(7)中减去CRM模型公式(8)得出误差方程:

(16)

4 Matlab/Simulink仿真验证
4.1 不确定性飞行器模型及参数

柔性飞行器模型的初始参数为=9144 m/s,=0°,=0°,=0°s,线性化模型的数值在公式(15)中给出。其中,{,,}在=11°的线性化模型可以用下列公式近似:

当≥11°时,柔性飞行器的俯仰模态不稳定,模型(15)包含固有频率=2 deg/s和阻尼比=07的二阶致动器动力学。是升降舵指令,是副翼指令。

(17)
式中,、、分别表示为:
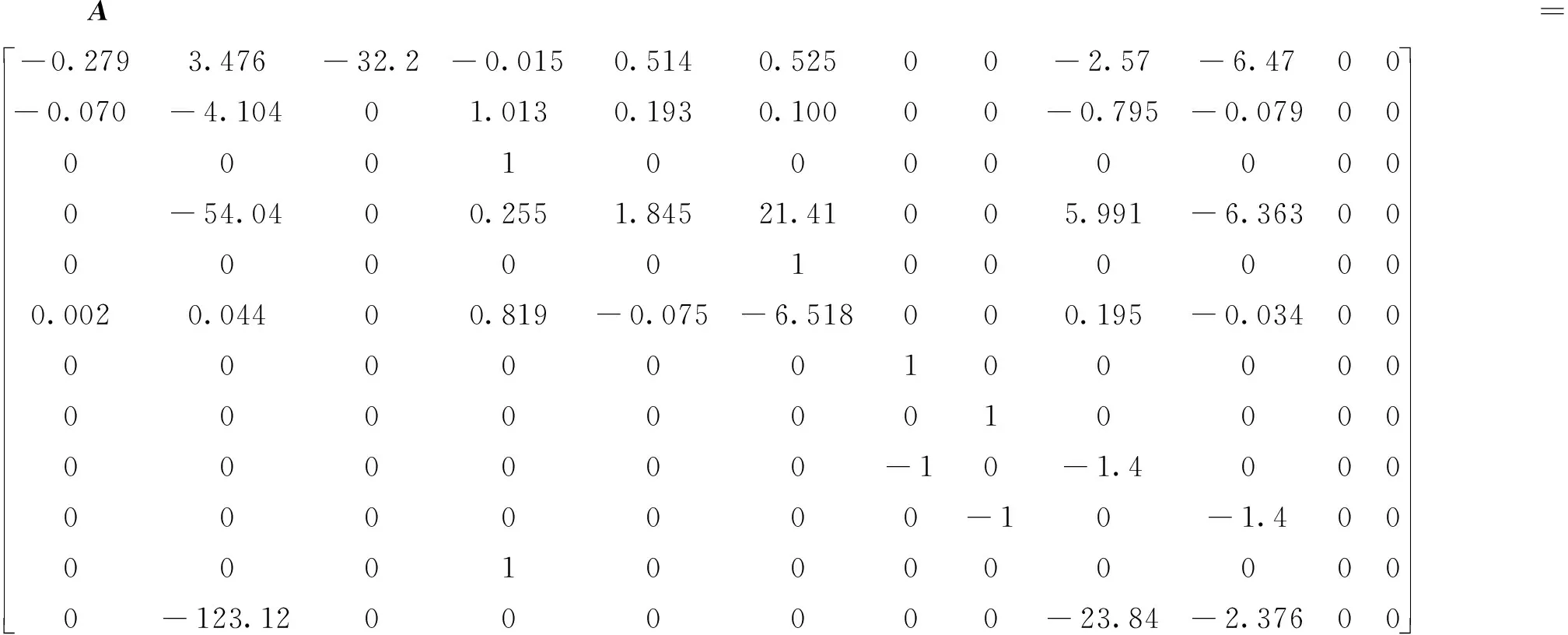

式中,、、分别表示为:
(18)

本次仿真是在包含标称二阶致动器的飞翼布局柔性飞行器模型上,在充分考虑外部环境以及飞行器动力学耦合作用,致使飞行器出现参数不确定问题的基础上,对比使用LQR方法,产生基于观测器的线性控制器(没有加入自适应)和加入修正闭环参考模型的参数自适应的反馈控制器在不确定性控制方向上的结果,凸显加入闭环参考模型的自适应反馈控制器在柔性飞行器不确定性问题上优越的控制性能。
4.2 基线LQR控制器仿真
本节作为对照组,采用基线LQR控制器来控制柔性飞行器的二阶标称致动器模型(=1 rad/sec和阻尼比=07)。控制目标使中心升降舵和外部副翼能够跟踪垂直加速度的指令,同时调节。
4.3 自适应输出反馈控制器仿真
本节作为实验组,采用设计的自适应输出反馈控制器来控制柔性飞行器的二阶标称致动器模型(=1 rad/sec和阻尼比=07)。控制目标使中心升降舵和外部副翼能够跟踪垂直加速度的指令,同时调节。
如图6~13所示,通过对比分析可知,本文设计的自适应输出反馈控制在针对具有参数不确定的柔性飞行器模型控制方面,具有更加优越的性能,相比于基线
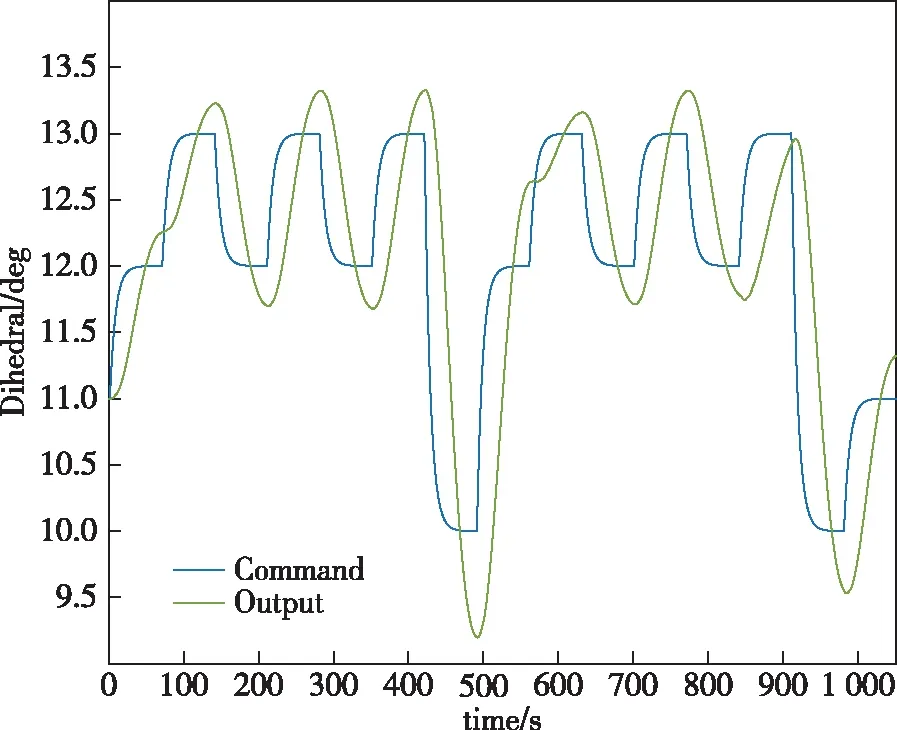
图6 基线LQR控制下的二面角

图7 基线 LQR控制器下的垂直加速度
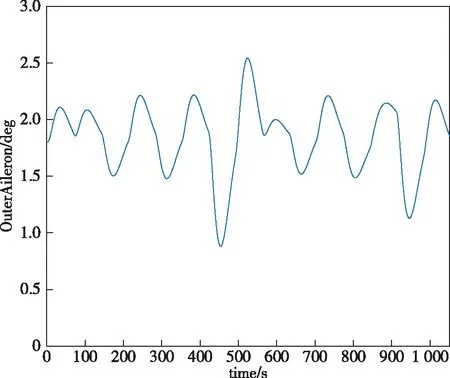
图8 基线LQR控制器下的外副翼
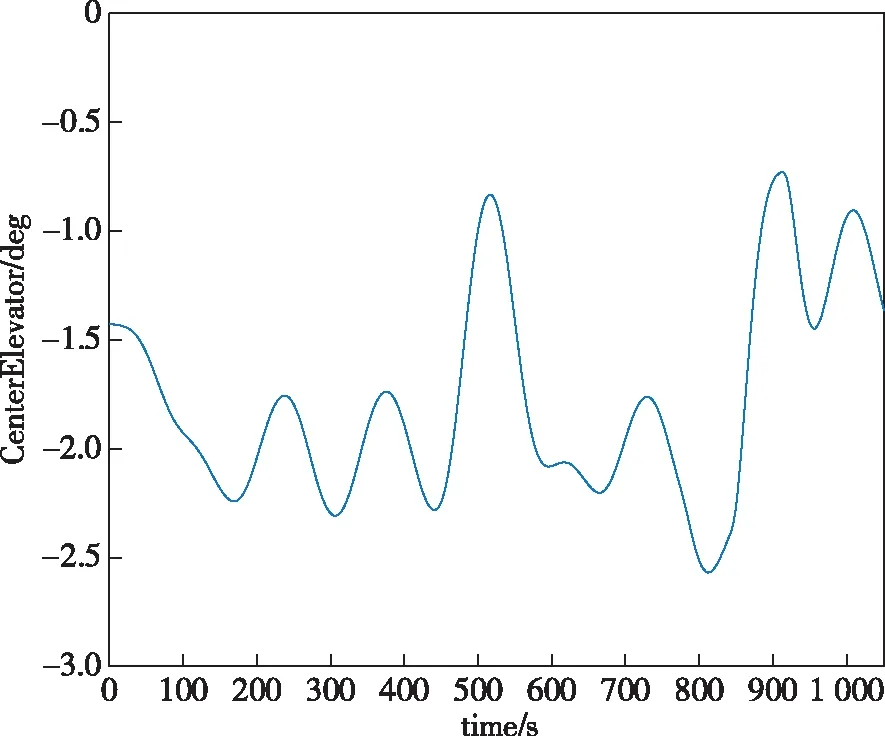
图9 基线LQR控制器下的升降舵
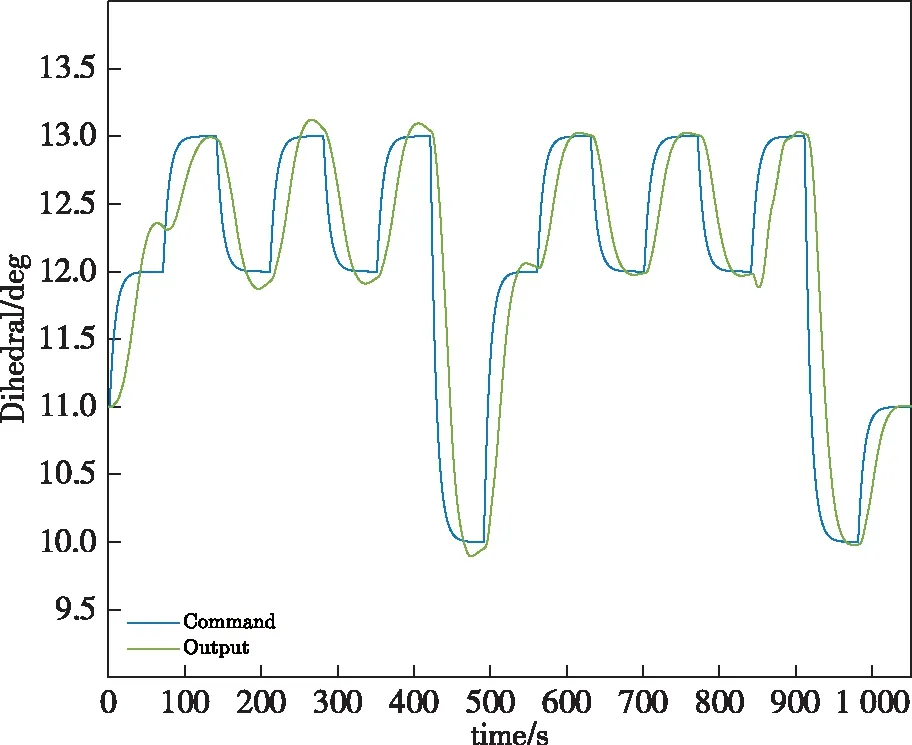
图10 自适应输出反馈控制下的二面角

图11 自适应输出反馈控制下的垂直加速度
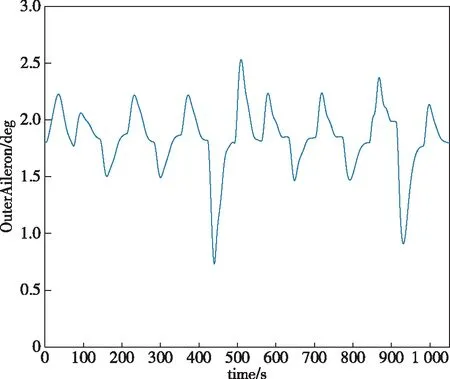
图12 自适应输出反馈控制下的外副翼
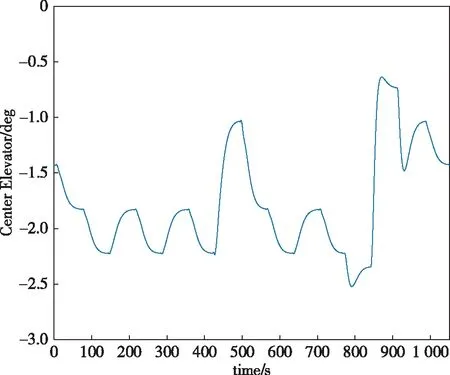
图13 自适应输出反馈控制下的升降舵

图14 自适应输出反馈控制器的参数轨迹
LQR控制器,自适应输出反馈控制器能够更好地控制二面角和垂直加速度跟踪指令,并且中心升降舵和外部副翼也能更好地跟踪垂直加速度的指令。相关的自适应输出反馈控制器参数如图14所示。
5 结束语
本文针对具有不确定参数的飞翼布局柔性飞行器模型,提出了一种新的自适应输出反馈控制方法。其中,设计了闭环参考模型,引入附加滤波器和可调参数,通过生成正实数传递函数矩阵,进而实现全局稳定和渐近跟踪,并在带有二阶致动器的飞翼布局柔性飞行器模型上进行仿真验证,结果显示其具有良好的控制性能。下一步的工作计划是将自适应输出反馈控制应用在其他布局柔性飞行器上,并将相关度扩展到更高的阶数,以及搭建柔性飞行器的自适应输出反馈控制物理实验平台,进行实物验证。
猜你喜欢
智能制造(2021年4期)2021-11-04 08:54:42
西安航空学院学报(2021年3期)2021-10-14 10:34:04
民用飞机设计与研究(2020年1期)2020-05-21 07:24:44
北京航空航天大学学报(2018年1期)2018-04-20 06:38:13
智富时代(2018年11期)2018-01-15 09:52:06
北京航空航天大学学报(2017年5期)2017-11-23 05:54:05
北京航空航天大学学报(2017年3期)2017-11-23 05:14:23
中国科技信息(2016年14期)2016-07-31 21:16:55
西北工业大学学报(2015年4期)2016-01-19 03:31:37
海军航空大学学报(2015年3期)2015-11-11 17:19:14
