基于对象的野三坡风景区九龙镇建筑物解译方法对比研究
2022-08-18 07:45杨思媛秦安臣
青岛理工大学学报 2022年4期
杨思媛,秦安臣
(河北农业大学 园林与旅游学院,保定 071000)
我国的风景资源分布广泛,许多地方受到地理条件的限制人迹罕至,依靠传统的人工实地调查方法很难对面积较大或地理环境险要的景区获取资源信息,因此借助科技手段自动或半自动解译旅游资源的研究是迫切需要的。遥感(Remote Sensing,RS)技术在景区资源获取中的应用使得资源获取变得更加便捷高效[1-3]。本文意在借助RS影像对九龙镇建筑物资源信息进行解译,以期为后续管理和优化九龙镇建筑物资源配置提供可参考资料和理论依据。
许多学者对建筑解译做了相关研究,提取方法大致可分为三类:一是基于平面轮廓信息的提取方法,赵俊娟等[4]首次提出基于角点的自动识别和定位方法对矩形建筑物进行了轮廓提取,通过尽量少的数据快速识别目标地物。李云帆等[5]分析点云数据特点,利用Alpha Shapes算法获取建筑物轮廓,借助直线特征和边缘线特征对轮廓进行精细化,进而将点到直线的距离作为投票机制的因子,从中过滤出真实的建筑物边界,最终获取精确的建筑物外轮廓。王秋燕等[6]同样采用Alpha Shapes 算法从一堆离散的点集中进行几何形状的重建,无需知道点云中各点处的法向量及其他先验知识即可对建筑物轮廓进行提取。吴炜等[7]利用Quick Bird影像结合光谱特征和对建筑物具有普适性的形状特征对影像进行阈值分类,结果表明结合多特征分类比利用阴影等相邻关系提取建筑物的识别率和精度更高。但该方法对面积较大研究区和异形建筑物提取精度欠佳,不具有普适性。二是基于对象分类方法,该方法多采用多尺度分割[8-12],先将影像分为内部均质的影像对象,然后利用建筑物的影像特征进行分类。KAMAGATA[13],孙波中[14]等通过对基于像元和基于对象分类两类方法的对比试验表明基于对象分类方法精度更高。贺晓璐等[15]借助Worldview-2影像利用建筑物的固有特征和高程特征与引入影像特有的红色边缘波段建立提取规则集分别对建筑物进行提取,结果表明引入红色边缘波段提取精度更高。三是基于辅助信息的提取方法,辅助信息多为DEM,DSM和阴影等。田峰等[16]借助GF-2号影像对研究区进行多尺度分割,然后充分利用阴影的光谱、形状等特征构建MSI算法剔除其他地物,利用阴影长度计算得到建筑物高度,通过与实测高度对比表明90%的建筑物高度误差小于1 m。王俊博等[17]借助DSM利用坡度和高差等信息对地面、陡坡和建筑物进行区分,并利用固有特征对建筑物轮廓进行优化,结果表明辅以DSM比无DSM精度更高,精度达到97.9%。
本文采用第二种基于对象分类方法对野三坡风景区内九龙镇建筑物进行解译。首先采用基于对象的阈值分类(Threshold Classification)、决策树(Classification and Regression Tree, CART)分类、最邻近(K-Nearest Neighbor, K-NN)分类三种方法对九龙镇进行建筑物提取并进行精度分析,然后采用形状一致性和面积一致性评价方法对解译精度最高的方法进行评价。
1 研究区概况及数据预处理
1.1 研究区概况
野三坡风景区内九龙镇建筑物分布较为密集且集中,故选取九龙镇区域作为研究区(图1)。该区位于河北省涞水县西北部的野三坡风景区,地处东经115°24′—115°25′,北纬39°47′—39°48′,坐落于山体中间低海拔平坦地带,距河北省保定市145 km,距北京市区100 km,研究区面积125 hm2。
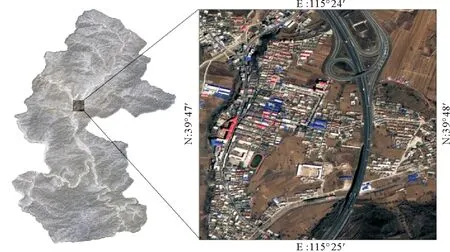
图1 九龙镇研究区
1.2 数据预处理
借助2018年4月16日高分2号(GF-2)遥感影像,利用ENVI5.3软件经过影像几何校正、镶嵌、裁剪、图像增强、图像融合等步骤得到实验所需图像,然后利用Region of Interest(ROI)裁剪工具得到研究区域。
2 研究过程
2.1 各地物解译标志的确定
RS图像的特征主要包括光谱特征、几何特征、纹理特征和拓扑特征,不同影像呈现出的地物特征不尽相同,针对研究区影像确定各地物解译标志,见表1。
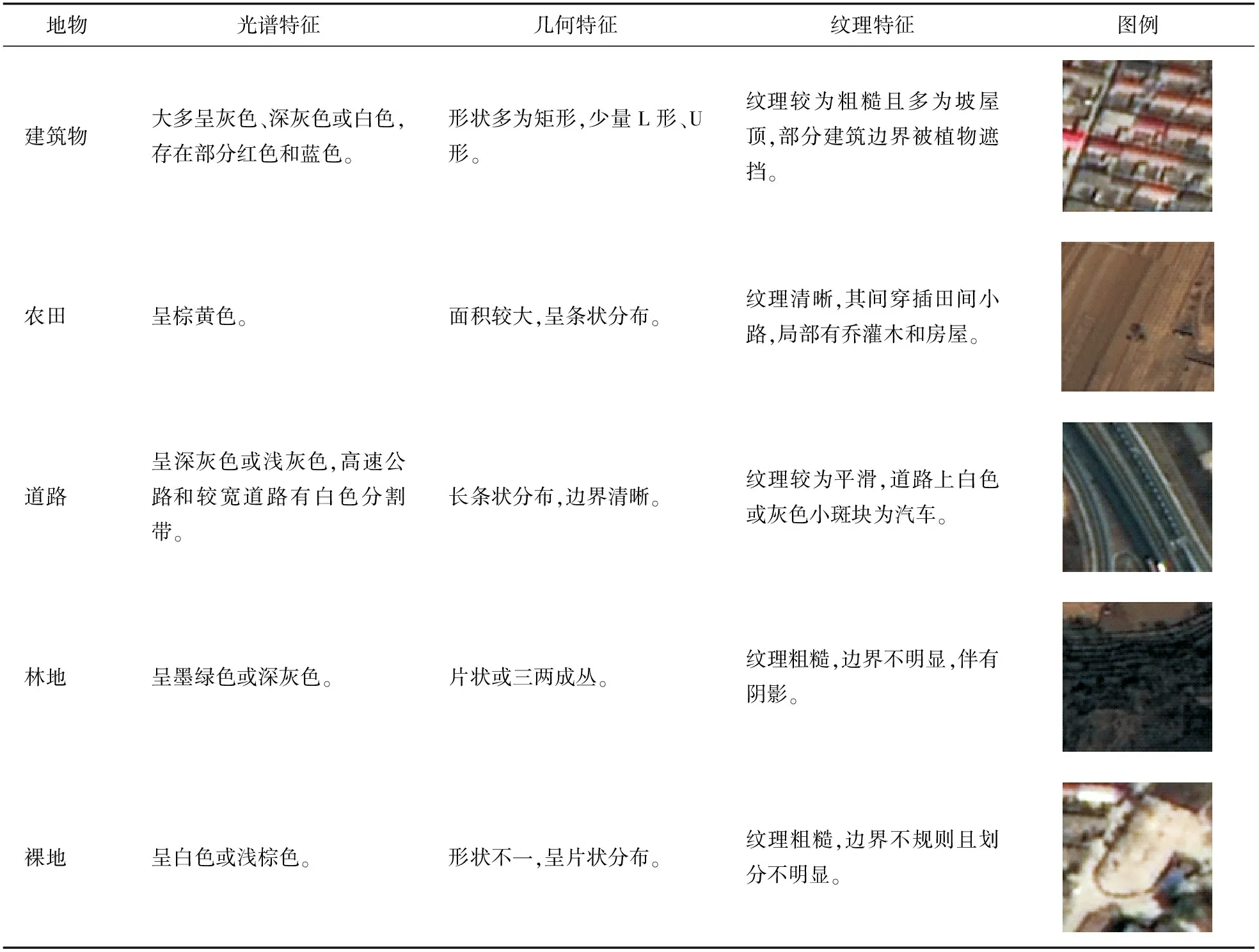
表1 九龙镇各地物图例
2.2 多尺度分割
基于对象影像分析的前提和关键一步是影像分割,分割结果直接影响最终分类精度,本文利用eCognition8.9软件对研究区GF-2号影像进行分割。
首先将形状因子权重和紧致度因子权重均固定为0.5,改变尺度参数数值,确定建筑物对象的最佳尺度。由于建筑物尺度相对较小,根据分割效果显示,尺度在100以上建筑物处于“欠分割”状态,不予考虑。将尺度参数由10到100以10为单位依次递增,通过对比认为:当形状因子和紧致度因子为0.5时,尺度参数设置越小分割越破碎,对象数量越大,面积越小,反之亦然(图2)。最终确定尺度参数为20时对于建筑物的分割效果最佳。

图2 相同形状因子和紧致度因子下不同尺度分割
将尺度参数固定为20,确定形状因子和紧致度因子权重。由于建筑物形状多接近矩形,故紧致度因子应设置较高些。将形状因子固定为0.5,紧致度因子由0.5到0.9以0.1为单位依次递增,效果表明紧致度因子为0.8时分割边界更符合建筑物边界。然后将紧致度因子固定为0.8,通过试验确定形状因子为0.4(图3)。最终经过多次反复试验确定建筑物的尺度参数为20,形状因子为0.4,紧致度因子为0.8(图3(d))。
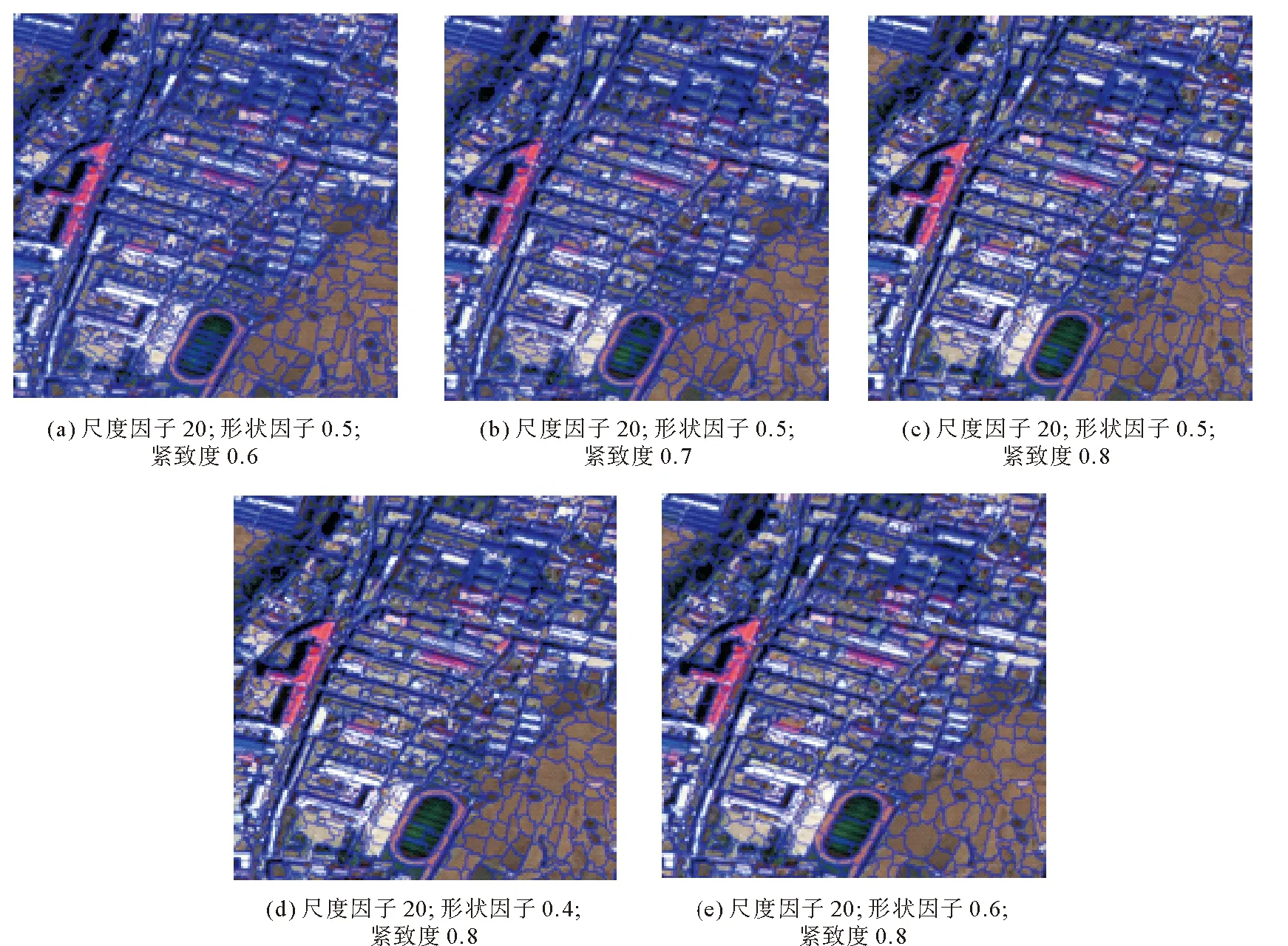
图3 分割尺度为20时不同紧致度和形状因子分割
2.3 解译方法及结果
在多尺度分割的基础上对分割后的影像对象进行分类,借助eCognition8.9软件选择合适的影像对象特征,分别采用阈值分类、CART分类、K-NN分类三种分类方法将地物分为建筑物、道路、农田、裸地、林地和其他6种类别。三种方法均采用分割尺度20,紧致度0.8,形状因子0.4的分割结果进行分类。
通过多尺度分割和影像分类,得到三种建筑物提取结果,如图4所示。从图4可以看出,三种方法分类结果整体效果较好,但均存在错分、漏分现象。

图4 三种分类方法建筑物解译结果
3 结果分析
3.1 误差矩阵精度评价
在ArcGIS中目视选取建筑物78个、农田29个、道路23个、裸地10个、林地10个,共计150个点作为精度检验的样本点。利用eCognition中的基于样本点的误差矩阵(Error Matrix Based on Samples)分别对三个分类结果进行精度评价,评价结果见表2。
由表2可知,阈值、CART、K-NN三种分类方法总体精度均达到85%以上,CART分类精度最低,阈值分类次之,K-NN分类方法精度最高。从分类速度而言,CART分类速度最快,K-NN次之,阈值分类速度最慢,CART分类在选取样本点和合适的地物特征后采用分类器软件自动完成分类,K-NN分类需要不断重复 “选样本点—分类”的过程提高分类精度,而阈值分类则需要尝试不同的分类特征并尽可能全面地选择可以区分不同地物的阈值,特征的选择和阈值的选择没有定式,需因地制宜根据研究区影像特征做判断,且各地物分类顺序不同导致的分类结果也不同。

表2 三种方法分类精度比较
建筑物的制图精度分别为92.77%,81.33%,97.22%,表明三种分类方法精度由高到低依次为K-NN分类>阈值分类>CART分类,K-NN分类对本研究区建筑物提取效果最好,阈值分类次之,CART分类效果较差。主要原因是K-NN分类在借助ArcGIS选择样本时更加注重建筑物样本点的选择,选择较为全面且分布均匀,各个颜色、纹理、位置的建筑物基本均匀选取,故其分类精度较高;阈值分类在尝试多种规则集后选择分类效果较好的规则进行分类,但规则集及特征阈值的确定存在主观性且不够全面,分类精度次之;CART分类选择特征过多时可能出现冗余的现象,借助分类器自动完成分类,虽然操作相对简单且分类速度较快,但分类精度较低。
3.2 形状一致性评价
通过借助eCognition平台的误差矩阵分析可知K-NN分类结果精度最高,采用该分类结果利用ArcGIS平台对建筑物边界进行优化处理,绘制出建筑物边界矢量图(图5),采用K-NN建筑物分类结果和优化后建筑物矢量图的对比对建筑物形状进行评价。

图5 建筑物K-NN分类及ArcGIS优化结果
假设S1为K-NN分类结果中所选建筑物样本的面积,S2为该建筑物样本优化后矢量图的面积,S3为两者不一致的面积,则S3=(S1∪S2)-(S1∩S2)。形状一致性检验方法为
当D1<6%时,建筑物形状极好;当6%
在K-NN分类结果和优化矢量图上分别随机选取相同的40个建筑物(表3),通过计算有3个建筑物形状极好,29个形状合格,8个不合格,合格率为80%。主要原因是:1)虽然多尺度分割后影像对象比较贴近地物自然边界,但由于分割是依据像素级进行的,所以仍不能完全与自然边界吻合。2)建筑物周围存在被植物或阴影遮挡的情况,导致分割和分类结果均存在误差。
3.3 面积一致性评价
根据三种分类结果及优化后影像借助ArcGIS平台计算出各地物面积及建筑物密度,见表4。
将优化后各地物面积作为参考值,由表4可知,三种分类方法在一定程度上均存在错分漏分的情况,相比而言,阈值分类和CART分类错分较多,统计面积较小,建筑密度偏小;K-NN分类建筑物面积和建筑密度更接近优化值,统计结果较为准确。
采用K-NN分类结果与优化后的影像对比,从图5中随机选取10个单体建筑物样本进行面积一致性评价,假设漏分误差为D2,错分误差为D3,则
由表5可知,漏分误差D2在3.98%~7.32%,错分误差D3在3.20%~7.01%,错误率在7.94%~13.34%,正确率在86.66%~92.06%,平均准确率为89.73%。虽然分类效果较为理想,但仍存在一些问题,主要原因有:1)建筑物边界存在被周围植物或阴影遮挡的现象,导致建筑物边界不完整。2)建筑物和道路的光谱特征相近,因此两者存在错分的现象。3)人为因素造成的误差,如所选样本较少且具有随机性。
4 结束语
本文借助GF-2号遥感影像采用阈值分类、CART分类和K-NN分类三种分类方法对九龙镇建筑物进行解译,通过误差矩阵、形状一致性和面积一致性三种精度评价方法的分析认为三种分类方法均能基本满足实际需求,其中K-NN分类方法精度更高,但仍存在一定误差,针对上述误差主要原因提出以下改进措施:
1) 影像分割和分类两个步骤相互作用相互影响,九龙镇影像在分割时未采用多层次分割的方法,后续研究可针对不同地物影像特征采用不同的分割参数进行分割,得到各类地物更加适宜的参数组合,以优化分割结果,进而使分类精度更高。
2) 阈值分类在选取特征和阈值时存在多种可能和先后顺序,需要操作者通过尝试确定最佳方法。CART分类在特征选取时存在特征过多而数据冗余的现象,在后续研究中应更加重视其特征的选取。K-NN分类在选择样本时或存在偏差,可通过实地定位或尽量全面均匀的选择样本等手段提高分类精度。
3) 分类结果精度评价所选样本存在一定的主观性,选取样本时应尽量做到全面准确且分布均匀。若条件允许,通过现场实际定位调查确定各地物经纬度位置获取样本的方法更加准确。
猜你喜欢
社会科学战线(2022年7期)2022-08-26
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
智能计算机与应用(2020年4期)2020-08-31
小天使·五年级语数英综合(2016年12期)2016-12-09
太空探索(2016年5期)2016-07-12
小朋友·聪明学堂(2015年7期)2015-11-30
时代英语·高三(2014年5期)2014-08-26
中学生英语·中考指导版(2008年6期)2008-12-19