
基于滑模预测控制的光伏储能双向DC/DC变换器
2022-08-15 06:00王丙元姜建
电气自动化 2022年4期
王丙元, 姜建
(中国民航大学,天津 300300)
0 引 言
随着我国航空业的高速发展,机场碳排放量逐渐增加导致环境污染日益严重,开发使用新能源为机场用电设备供电可以起到节能减排的作用[1]。太阳能属于可再生的清洁能源[2],可以将光伏发电技术应用在机场航站楼以及充电桩的设计中,这将有利于加快绿色机场建设。
光伏发电系统输出功率具有不确定性和多变性缺点,需要接入储能单元平抑功率波动。对于有多源扰动的光储系统来说,传统的PI双闭环控制[3]难以在提高系统的动态响应情况下同时有效稳定直流母线电压波动。为此国内外学者提出了其他先进控制算法,如滑模控制[4]、自适应控制[5]、自抗扰控制[6]和模型预测控制[7]等。滑模控制主要优点是抵抗系统中不确定性扰动能力强,文献[8-9]针对DC/DC双向变换器采用滑模控制,保证系统在较大扰动情况下具有强的鲁棒性,由于滑模控制的高频切换造成系统输出电压和电流纹波较大。
由于模型预测控制具有动态响应速度快、稳态精度高、能显示处理约束等特性,在现代工业中被广泛应用。文献[10-11]提出了用于光储系统双向DC/DC变换器预测电流和预测功率控制策略,在光伏输出功率和负载突变时稳定直流母线电压,减小蓄电池电流纹波,提高系统的动态响应。但上述文献未对预测状态量采取反馈矫正措施,系统中的不确定性扰动使电流或功率的预测值与真实值之间存在偏差,导致系统鲁棒性降低。
为减小滑模控制中抖振和增强模型预测控制鲁棒性,本文提出了一种基于滑模预测的光储系统优化控制策略。首先根据母线电压和蓄电池电流跟踪误差建立滑模面多步预测模型;然后将传统模型预测控制中的反馈校正和滚动优化思想应用在滑模控制系统中,建立合适的目标评价函数求得系统最优开关状态;最后分别对储能系统基于滑模控制和滑模预测控制进行仿真试验,并对试验结果做对比分析。
1 光伏储能系统构成及模型建立
1.1 系统拓扑结构
本文所采用光伏储能系统如图1所示,其一次能源为太阳能,该系统由光伏阵列、双向DC/DC变换器、升压变换器和蓄电池等几个模块组成。其中蓄电池作为储能单元,主要通过控制双向DC/DC变换器工作模式来实现对蓄电池的充放电控制。
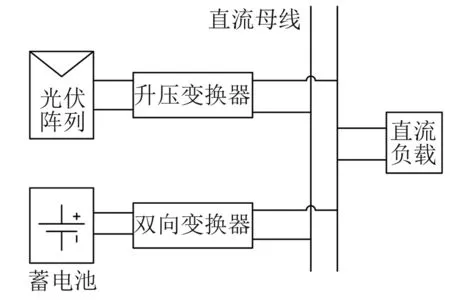
图1 光伏储能系统结构图
1.2 双向DC/DC变换器的数学模型
双向Buck/Boost变换器是光伏储能单元与系统中直流母线的连接枢纽,通过采取合理的控制策略使其在升压和降压两种模式间能顺利切换,有效控制能量在蓄电池和直流母线之间传输方向和大小,保证光伏储能系统稳定可靠工作。它的拓扑结构如图2所示。
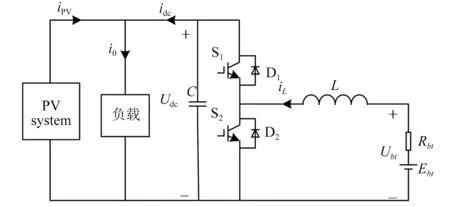
图2 光伏储能系统中双向DC/DC变换器拓扑结构
图2中:Udc为直流母线电压;Ubt为蓄电池两端电压;idc为双向变换器流向直流母线的电流;iL为蓄电池充放电电流;开关管选用IGBT,分别用S1、S2表示;D1、D2为开关管体二极管;C为与母线连接的电容;L为系统中储能电感。当系统中光伏输出功率小于负载额定功率时,蓄电池开始放电,系统控制开关管S2工作,令S1一直处于关断状态,双向DC/DC变换器此时处于Boost工作模式下。当光伏输出功率大于负载额定功率时,开始给蓄电池充电,系统控制S1管工作,令S2管一直关断,此时双向DC/DC变换器处于Buck工作模式下。
开关状态u1、u2分别表示开关管S1、S2导通和关断(当开关管S1导通时u1=1,当开关管S1关断时u1=0;开关状态u2与此相同),电路中正方向定义为蓄电池放电时iL、idc的方向。放电时(即变换器工作在Boost模式下)开关管S2在两个开关状态下对应不同等效电路,当开关状态u2=1时,连接在母线上的电容放出能量,电感储能;当开关状态u2=0时,连接在母线上的电容储存能量,电感放出能量,如图3所示。
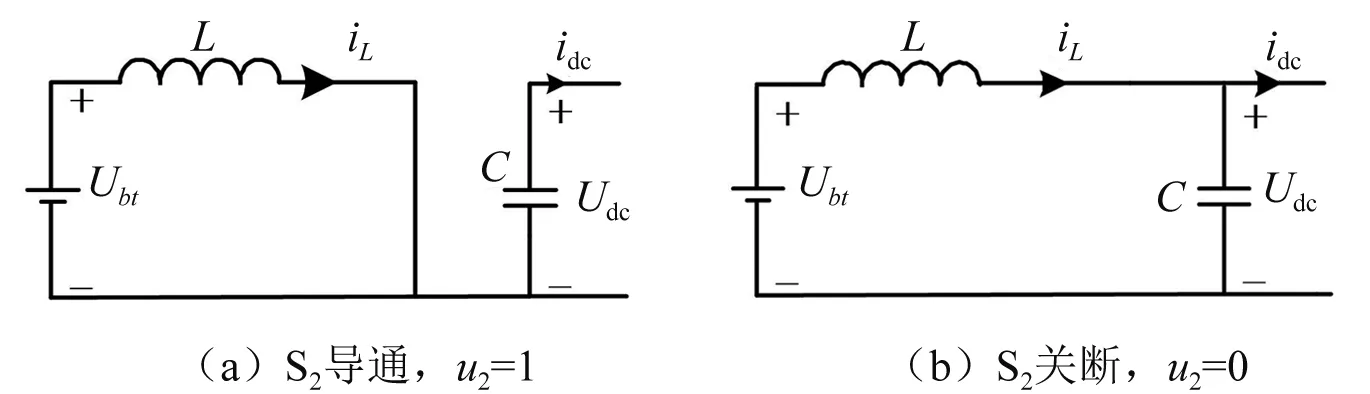
图3 Boost模式下双向变换器等效电路
可得Boost模式下变换器数学模型:
(1)
同理可得Buck模式下变换器数学模型:
(2)
上式中变换器流入直流母线的电流idc以及蓄电池两端电压Ubt可由式(3)、式(4)求得:
(3)
Ubt=Ebt-iLRbt
(4)
式中:pv为光伏输出功率;Udc为直流母线实时电压;io为流过负载电流;iPV为光伏系统流向直流母线电流;Ebt为蓄电池电动势;iL为蓄电池充放电电流;Rbt为蓄电池的内阻。
通过一阶欧拉前项法对系统连续模型进行离散化,设系统采样周期为Ts。Boost模式下直流母线电压和储能电感电流的预测模型为:
(5)
同理可得Buck模式下直流母线电压和储能电感电流预测模型为:
(6)
式中:Udc(k)、iL(k)、idc(k)、Ubt(k)分别为k时刻直流母线采样电压、蓄电池采样电流、变换器流向直流母线的采样电流和蓄电池采样电压。依据k时刻上述电压、电流采样值可以预测出下一时刻直流母线电压值Udc(k+1)以及蓄电池电流值iL(k+1)。
2 双向变换器的控制算法设计
2.1 滑模变结构控制算法
对光伏储能系统双向变换器采用滑模变结构控制,首先要确定一个合适的滑模面,根据系统中直流母线电压和蓄电池电流跟踪误差来构造滑模面,通过滑模面来设计系统的控制律u。
(7)
s(k)=c1e1(k)+c2e2(k)
(8)
式中:e1(k)为蓄电池电流跟踪误差,e1(k)=iL(k)-iLr;e2(k)为直流母线电压跟踪误差,e2(k)=Udc(k)-Udcr;Udcr为直流母线电压额定值;iLr蓄电池充放电电流给定值;s(k)为滑模切换函数。滑模控制系统结构框图如图4所示:u为开关管S1、S2的开关状态。

图4 滑模控制系统结构框图
iLr可由式(9)计算得出。
(9)
(10)
式中:pref为负载额定功率;pv为光伏输出功率;io为流过负载电流;Udc为母线两端实时电压;Ubt为蓄电池两端实时电压。
2.2 滑模预测控制算法
应用滑模预测控制理论设计光储系统双向DC/DC变换器控制器的核心思想是:首先找到一个具有期望滑动模态的变换器滑模预测模型,接下来依据模型预测控制中的反馈校正和滚动优化思想获得满足系统要求的控制规则。为了保证理想滑动模态良好动态品质以及渐进稳定性,需要选取满足系统要求的趋近律,确保在有限时间内从初始状态出发的运动轨迹能够到达并稳定在先前设计好的理想滑动模态上。
1) 滑模预测模型
(11)
滑模切换函数k+p在未来时刻的预测值如式(12)所示。
(12)
2) 反馈校正
在光伏储能系统实际运行过程中,由于直流双向变换器的非线性特性,系统外部干扰以及内部参数可能存在波动,系统中滑模切换函数预测值和实际值存有偏差,因此系统引入校正环节对未来时刻滑模切换函数预测值进行反馈校正。
过去k-p时刻对k时刻的预测值为s(k|k-p)。
(13)
反馈校正后的预测值如下:
(14)
其中校正系数为hp∈R,随着hp的减小反馈校正作用降低。
3) 滑模参考轨迹
为使预测切换函数值能够快速平滑地趋近期望的切换函数值,需要设计出合理的参考轨迹,根据文献[12]取指数趋近律作为期望参考轨迹:

(15)
式中:m为系统趋近速度参数,m>0;ε为符号函数参数,ε>0;sr(k+p)为未来k+p时刻滑模切换函数参考值;Ts为系统采样周期,1-mTs>0。
4) 滚动优化
由上文建立的双向DC/DC变换器数学模型,进一步可以得到工作在不同模式下系统的滑模切换函数预测模型。
当工作在Buck模式下切换函数预测模型如下。
(1)u1=0时:
(16)
(2)u1=1时:
(17)
同理可以得到工作在Boost模式下的切换函数预测模型,具体如下。
(1)u2=0时:
(18)
(2)u2=1时:
(19)

(20)
式中:p为滑模切换函数预测步长;qi为切换函数加权系数。滑模预测控制系统结构框图如图5所示。
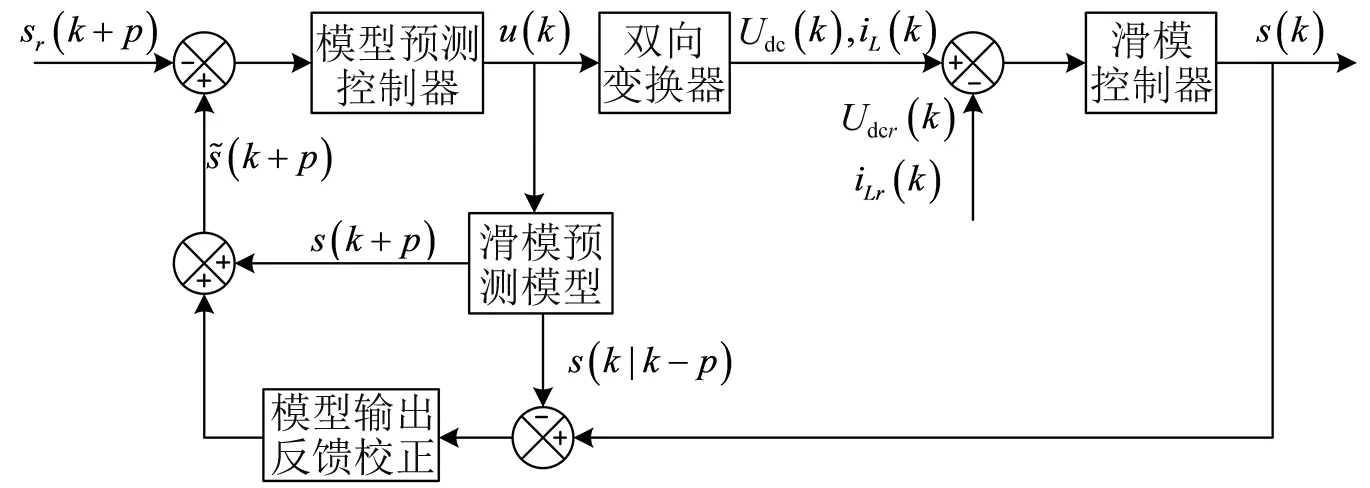
图5 滑模预测控制系统结构框图
以滑模切换函数值作为控制量,对当前系统状态信息进行采集,根据滑模预测模型分别计算出双向变换器开关管S1和S2的开关状态为1,0时所对应未来k+p时刻切换函数预测值;然后比较光伏输出功率与负载额定功率的大小,确定此时双向变换器工作模式,在不同工作模式下比较所求的两个目标函数值的大小,选取最小的一组目标函数值对应的开关状态作为系统下一时刻的开关管状态,用以控制直流变换器下一时刻动作。系统控制过程流程如图6所示。
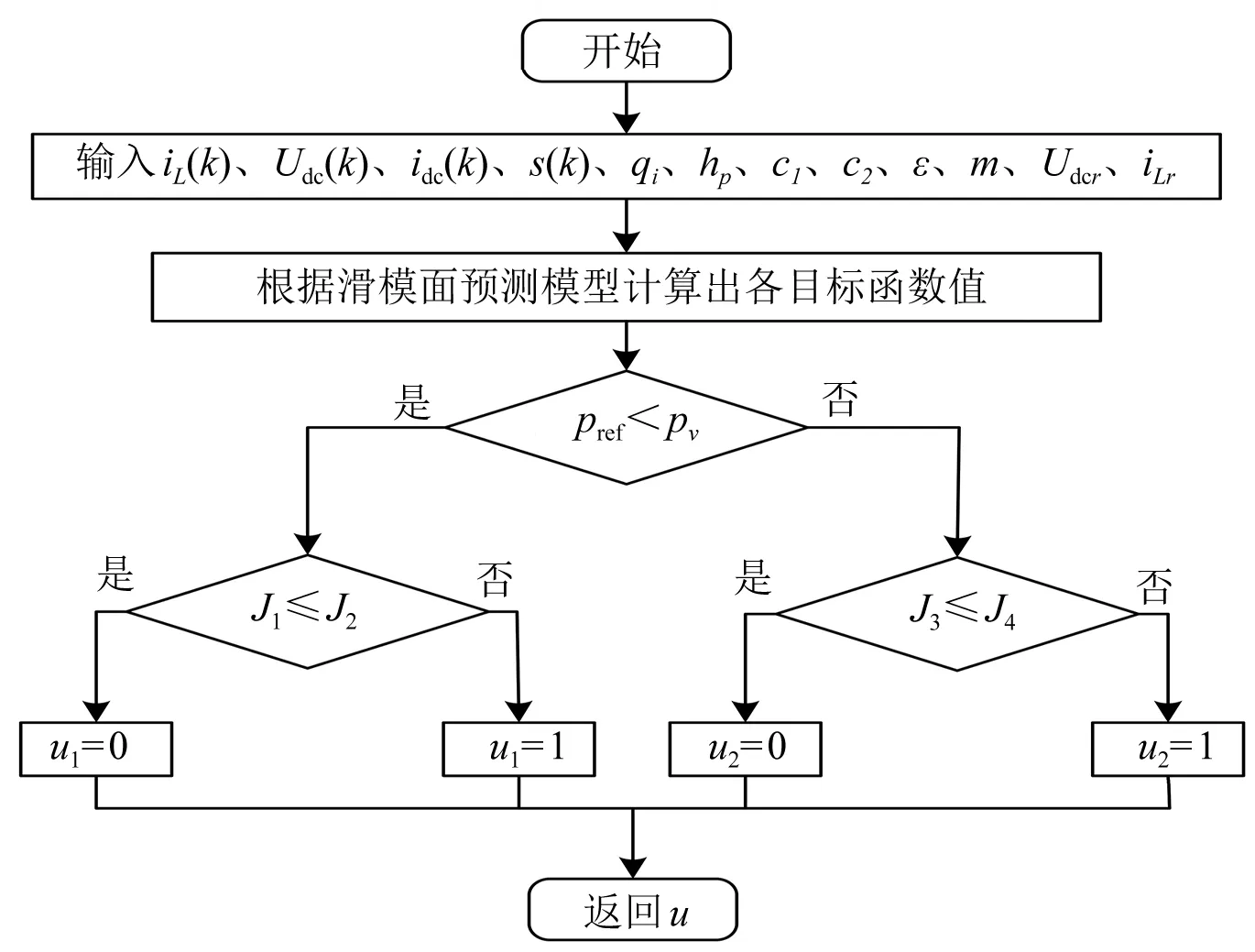
图6 滑模预测控制过程流程图
3 系统仿真
将机场电动车作为直流负载,电动车动力电池为200 V/20 kWh,蓄电池采用100 V/100 Ah。为验证所提出的算法有效性,在MATLAB环境下,对光伏储能系统中DC/DC双向变换器的控制进行了仿真试验,并对所采用的滑模控制和滑模预测控制两种算法仿真结果进行比较,系统仿真参数见表1。
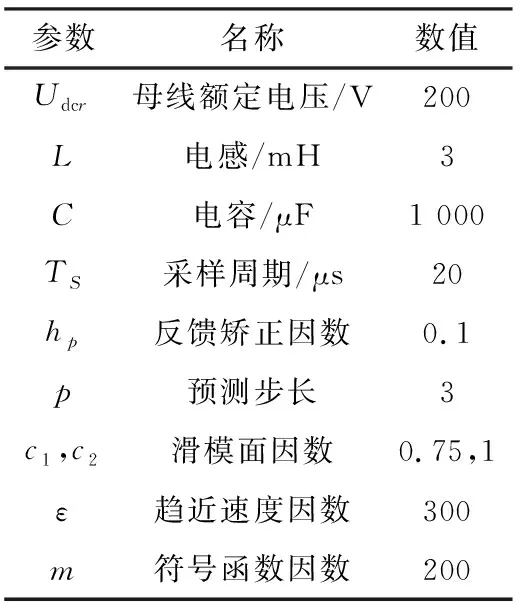
表1 系统控制器参数
当t=0时刻光伏输出功率为2.5 kW,系统中负载所需功率为3.5 kW,此时光伏输出功率小于负载所需额定功率,蓄电池通过变换器的升压工作模式来提供维持直流母线电压稳定所需的功率,在较短时间内使系统中功率达到平衡;光伏阵列输出功率在t=0.15 s时由2.5 kW突变为5 kW,此时系统中负载不变;在t=0.3 s时负载所需功率由3.5 kW突变为5.5 kW,此时光伏输出功率不变;在t=0.45 s时光伏输出功率由5 kW突变到3 kW,此时负载所需功率也从5.5 kW突变为2 kW。以上光伏输出功率和系统中直流负载发生突变时,将导致母线电压波动和蓄电池充放电电流变化,通过控制双向变换器在Buck和Boost两种模式间顺利切换来满足母线电压能量需求,维持直流母线电压的稳定。
两种算法对光伏储能系统直流母线电压仿真,如图7、图8所示。采用的两种控制算法最终都可以使直流母线电压稳定在额定值,滑模控制在0.15 s时母线电压超调为5.81%,0.3 s时电压超调为-2.64%,0.45 s时电压超调为2.36%;而采用滑模预测控制0.15 s时母线电压超调为4.81%,0.3 s时电压超调为-1.14%,0.45 s时电压超调为1.81%。滑模预测控制与滑模变结构控制相比,在处理系统中功率突变的大扰动时,能够使直流母线电压快速恢复到额定值且超调量小。
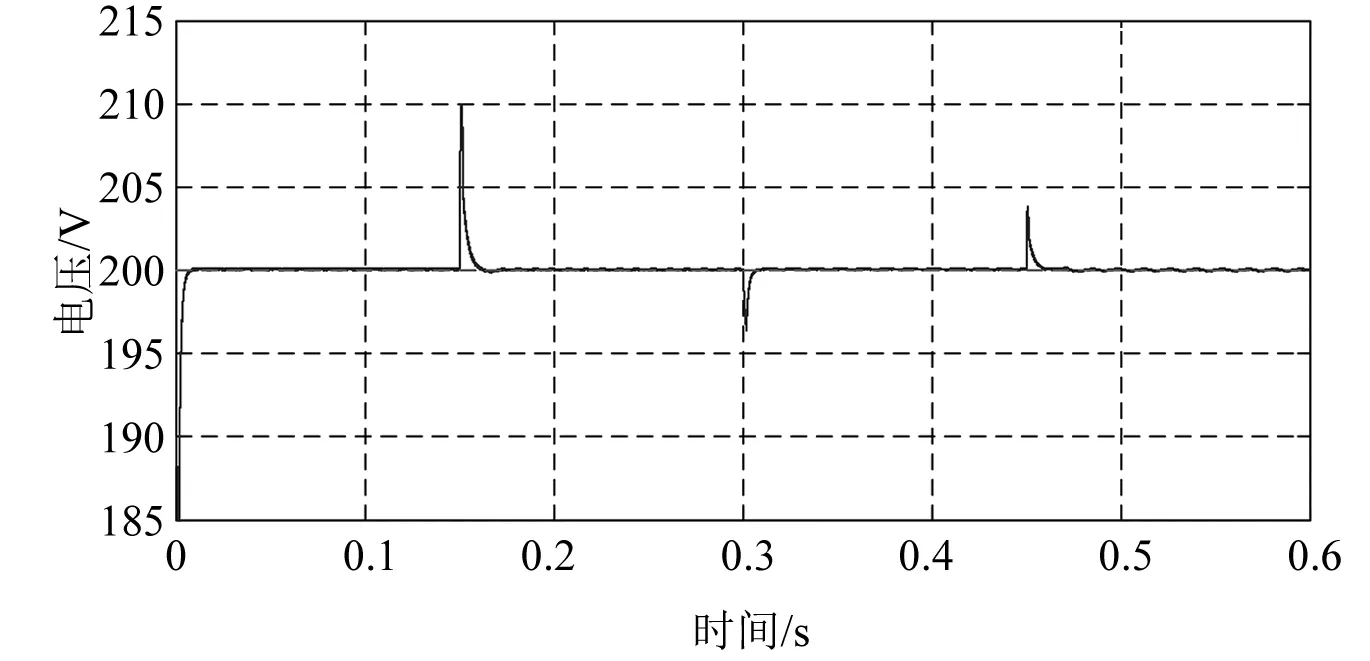
图7 滑模预测控制母线电压波形
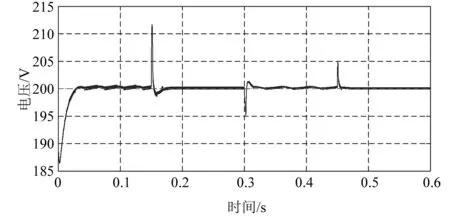
图8 滑模变结构控制母线电压波形
在两种控制算法作用下光伏储能系统中蓄电池充放电电流仿真波形如图9、图10所示。从图中可以看出:在滑模控制时,蓄电池电流在充放电过程中波动较大,而采用滑模预测控制时不但能使蓄电池充放电电流稳定在给定值,而且明显减小了蓄电池电流纹波,使系统在充放电过程中能够减小对蓄电池冲击,延长其使用寿命。

图9 滑模预测控制蓄电池电流波形

图10 滑模控制蓄电池电流波形
采用两种控制算法得到滑模面仿真波形如图11、图12所示。从图中可以看出,在两种控制算法作用下,系统的跟踪误差在达到稳态时,首先快速趋近滑模面,然后处于滑模面上,当储能系统在某时刻发生负载和输出功率突变时,跟踪误差将会离开滑模面并在极短时间内迅速回到滑模面上。滑模控制的跟踪误差在滑动模态上存在一定的波动,与滑模控制相比,滑模预测控制的跟踪误差在滑动模态上几乎不存在波动。
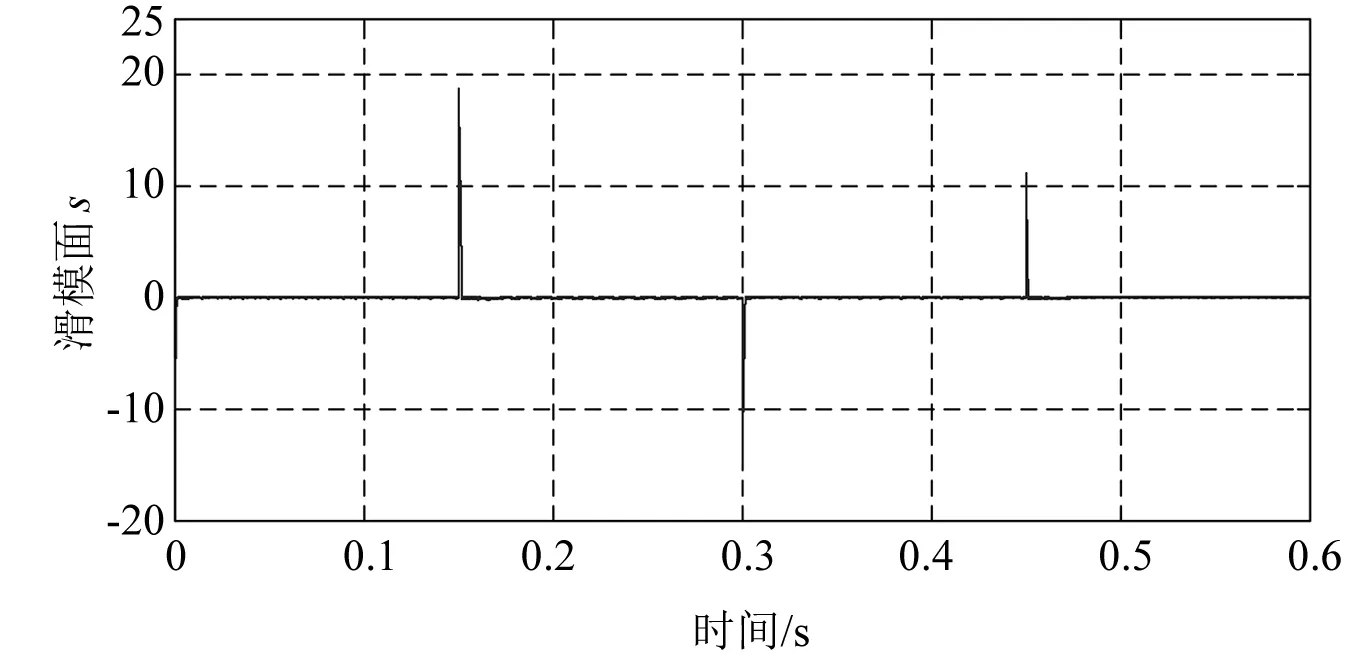
图11 滑模预测控制的滑动模态仿真图
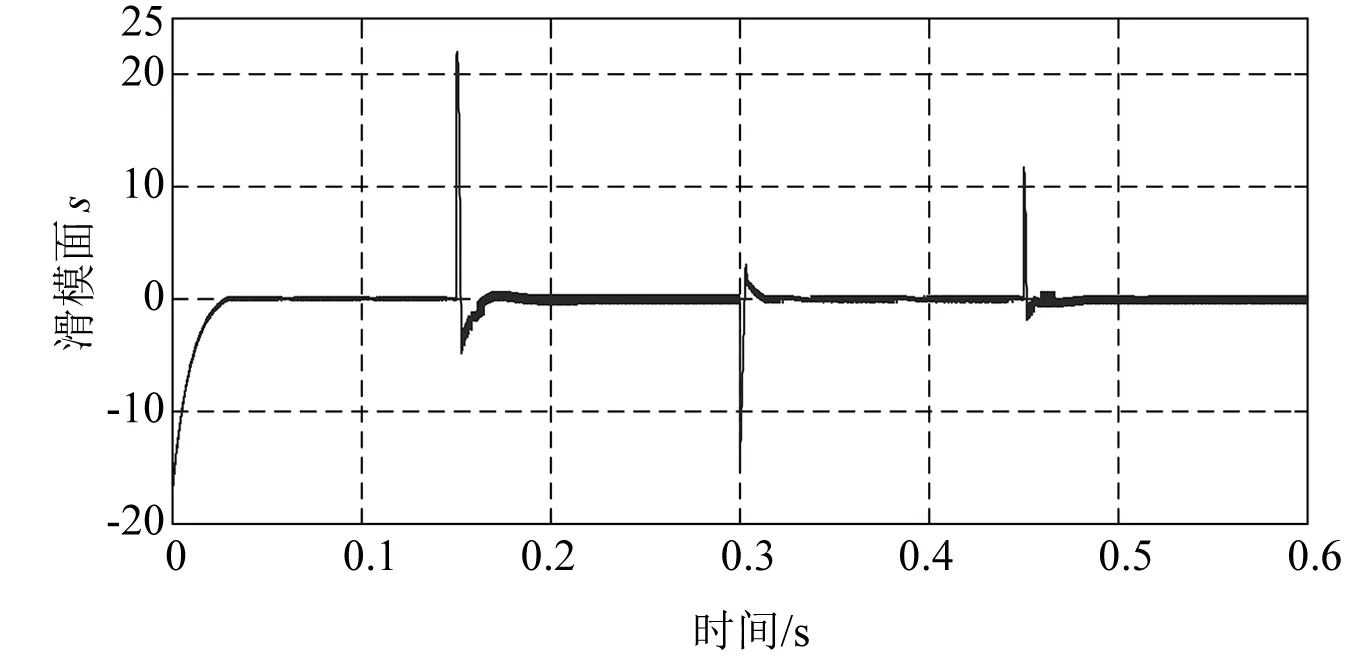
图12 滑模变结构控制的滑动模态仿真图
4 结束语
本文应用滑模预测控制算法来对光伏储能系统中双向DC/DC变换器进行控制,通过采样获得当前时刻母线电压和蓄电池电流值,得到未来p时刻滑模切换函数预测值,经过反馈校正和滚动优化得到使储能系统下一时刻工作最优的开关状态,通过控制蓄电池快速充放电来实现母线电压稳定。当负载投切以及光伏输出功率突变时,与滑模变结构控制相比,滑模预测控制能快速地稳定直流母线电压,准确跟踪上蓄电池电流的给定值,且减小了蓄电池电流的脉动,延长其使用寿命。试验结果验证了所采用算法在光储系统中有效性和正确性。
猜你喜欢
电工电能新技术(2022年9期)2022-10-09
舰船科学技术(2022年10期)2022-06-17
西部交通科技(2022年2期)2022-04-27
计算机测量与控制(2021年10期)2021-11-01
科技信息·学术版(2021年7期)2021-01-10
速读·上旬(2019年2期)2019-10-21
课程教育研究·学法教法研究(2018年20期)2018-08-11
科技视界(2016年18期)2016-11-03
现代电子技术(2015年17期)2015-09-23
科学时代·上半月(2013年3期)2013-05-10
