
无线光通信系统捕获、瞄准和跟踪研究进展
2022-08-13 03:07梁静远陈瑞东姚海峰曹明华邓佳新
光电工程 2022年8期
梁静远,陈瑞东,姚海峰,白 勃,曹明华,赵 黎,王 怡,邓佳新
1 西安理工大学自动化与信息工程学院,陕西 西安 710048;2 长春理工大学光电工程学院,吉林 长春 130013;3 中国计量大学信息工程学院,浙江 杭州 310018;4 兰州理工大学计算机与通信学院,甘肃 兰州 730050;5 西安工业大学电子信息工程学院,陕西 西安 710021;6 西安电子科技大学通信工程学院,陕西 西安 710119
1 引言
无线光通信同时具有微波通信和光纤通信的优点[1],是在实现空基、天基和陆基等通信链路的重要手段之一[2],在军事保密通信、应急救援通信等领域具有广阔发展前景。但由于机械抖动和大气信道中各种不确定性因素(如大气湍流、雨、雪、扬尘等)的影响,造成接收端光斑位置偏移甚至丢失光斑信息,从而使系统误码率增大,最终导致通信系统性能下降,给无线光通信链路的建立和保持带来了困难[3]。因此,需要建立一套捕获、瞄准和跟踪(acquisition,pointing and tracking,APT)系统来防止通信链路中断。在无线光通信系统中,要求搭载发射端和接收端的两个平台上的光学元件实时共视轴,这个过程通常称为自动瞄准[4]。无线光APT 系统结构示意图如图1 所示,APT 系统包括粗、精跟瞄结构及其伺服单元,在收发双方完成初始指向后,信号光和信标光经过合束镜后通过发射天线准直发射输出,由接收端的捕获装置开始扫描合成光束完成捕获工作;位于接收端的分束镜将经过接收端的光束分别引导至跟踪探测器和通信探测器;当光束照射在接收端探测器感光面上,在伺服机构的驱动下使收发两端视轴瞄准;最后根据接收端实时反馈的光斑信息,粗跟踪结构调整光束的方向令其垂直入射探测器中心,精跟踪结构进一步消除未经粗跟踪结构消除的跟踪残差,保证收发两端视轴实时瞄准。

图1 无线光通信APT 系统结构示意图[5]Fig.1 Optical wireless communication APT system diagram[5]
本文介绍了无线光通信系统APT 方面的国内外研究进展和历程,归纳总结了西安理工大学在该领域取得的研究成果,并根据现有的研究理论对APT 系统在无线光通信中的应用前景和研究方向进行了展望。
2 国外研究进展
APT 系统是无线光通信系统中不可或缺的一部分,其作用是确保发射端与接收端光束完全实时瞄准,从而建立稳定的无线光通信链路。APT 系统的发展历程与无线光通信系统的发展历程几乎是同步的。20 世纪70 年代,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)就开展了关于空基无线光通信系统方面的实验研究,德国宇航局(Deutsches Zentrum für Luft-und Raumfahrt,DLR)、欧洲航天局(European Space Agency,ESA)、日本航天局(National Space Development Agency of Japan,NASDA)等机构都相继进行了星地、空地光通信链路实验。
1985 年,NASDA 研 制 了LUCE (Laser Utilizing Communication Equipment)系统,该系统中用于对准和跟踪的探测系统由电荷耦合元件 (charge-coupled device,CCD)和四象限探测器组成。实验表明该系统在强震动环境下其瞄准和跟踪精度均优于1 mrad[6]。
1994 年,JPL 研发了激光通信演示(optical communication demonstrator,OCD)系统,实现了光束的快速、精确瞄准和稳定跟踪,数据传输速率为250 Mb/s[7]。
1994 年,日本邮政省(Ministry of Posts and Telecommunications,MPT)研发了激光通信设备(laser communication equipment,LCE)。该系统粗跟踪结构采用面阵CCD 探测,粗跟踪精度32 μrad。精跟踪结构利用四象限探测器测量光束的位置信息,其精度可达2 μrad,且具有200 Hz 的抖动补偿能力[8]。
1999 年,Biswas 等人设计了一种卫星激光通信终端(lasercom communication terminal,LCT),其采用独立的发射和接收天线,捕获传感器采用面阵CCD,使用伺服转台进行瞄准和跟踪,该系统在跟踪模式下CCD 工作的帧频可达1.6 kHz[9]。
2002 年,ESA 利用半导体激光器星间链路实验(semiconductor laser inter-satellite link experiment,SILEX)系统建立了星间的光通信链路,该系统采用粗精结合的复合轴对准系统,分别由直流步进电机和快速反射镜组成,其跟踪精度可达2 μrad[10]。
2004 年,Guelman 等人采用了一种两级的分层系统控制,下层控制电光收发器的云台;上层是一个快速闭环控制系统,以控制波束宽度和方向,实现了无人机对地面的激光通信[11]。
2004 年,美国麻省理工学林肯实验室与JPL合作研发了火星激光通信演示系统(Mars laser communications demonstration system,MLCD)。该系统采用光子计数探测器和望远镜接收阵列结构。采用组合瞄准和跟踪系统,提高了瞄准精度,系统的通信速率最高可达10 Mb/s[12]。
2010 年,DLR 设计了一种无信标激光通信终端(laser communication terminal,LCT)。在瞄准和跟踪过程中不使用信标光,只用二维伺服转台控制反射镜进行螺旋扫描捕获信号光,降低了机载激光通信终端的复杂度,平均跟踪误差为226 μrad[13]。
2012 年,Schmidt 等人设计了一种小型激光通信终端,该系统由一个提供宽视场的物镜和用于控制光束转向镜的驱动器组成。该系统在能够实现快速瞄准的基础上,提供46°的宽视场[14]。
2013 年,DLR 进行了空对地无线光通信实验。机载激光终端包括粗瞄准结构和精瞄准机构。实验表明,该系统可将湍流和微震动对跟踪精度的影响减小到200 μrad 以下[15]。同年,DLR 进行了“狂风”战斗机与地面端之间的机载激光通信实验。通信链路距离为50 km,数据传输速率为1.25 Gb/s,飞机搭载的APT 系统终端可实现79 km 的稳定跟踪[16]。
2016 年,Quintana 等人设计了一种由CCD 相机构成的粗跟踪模块以及由空间光调制器和位置传感器(PSD)构成的精跟踪模块协同工作的跟踪系统,将该系统应用于空-地激光通信试验。最终在300 m范围内建立了2 Mb/s 的光通信链路,误码率约为2×10−4[17]。
2020 年,Antonello 等人设计了一种用于在轨激光通信的高精度瞄准和跟踪系统。该系统采用粗、精两级瞄准结构,重量为1.8 kg,通过模拟外部干扰环境,测得系统的瞄准误差小于10 μrad[18]。
本文所引用的国外研究进展汇总如表1 所示。

表1 国外研究进展Table 1 Research progress abroad
从上述研究进展可以发现,自开展无线光通信APT 系统研究以来,其应用场景逐渐从地面站发展到机载光通信平台(文献 [7,11,13~17])和星间光通信平台上(文献[4~6,8~9,10,12,18]),对跟瞄系统的精度要求也随之提高。
3 国内研究进展
20 世纪90 年代起,我国多家科研单位和高校在无线光通信领域展开了深入研究,在快速瞄准系统、复合轴控制系统、机载激光通信系统取得了一定的成果。目前国内主要的研究机构有长春理工大学、哈尔滨工业大学、中科院长春光学精密机械与物理研究所、武汉大学和西安理工大学等。
1999 年,刘泽金等人设计了一种无线光通信系统自动瞄准方案。该方案利用反射镜作为光束稳定机构,消除了系统中存在的光束漂移和机械震动造成的收发两端光轴偏差[4]。
2005 年,艾勇等人设计了一种空间光APT 方案,该方案利用CCD 传感器作为图像处理器件,以数字信号处理器件DSP 控制驱动复合轴系统实现跟踪。实验结果表明,角度测量的相对误差约为1.3%[19]。
2007 年,佟首峰等人对复合轴粗跟踪伺服带宽进行了优化设计,模拟进行了星际间无线光通信实验。当伺服带宽为16 Hz 时,粗跟踪误差和精跟踪误差分别为60 μrad 和4 μrad[20]。
2008 年,潘高峰设计了一种上、下行链路自动瞄准系统。通过调整倾斜反射镜的角度使发射端与CCD 测角仪瞄准,收发两端光轴的瞄准精度可达20.52 μrad[21]。
2011 年,宋延嵩等人分析了外界约束环境对机载激光通信系统的影响,实现了两架飞机间的无线光通信实验,飞机飞行高度为700 m,通信速率为1.5 Gb/s[22]。
2013 年,钱锋等人提出了一种新型光斑探测相机的设计方案,该方案以较高像元占空比的探测器为基础,降低了噪声对探测器定位精度的影响。实验结果表明利用该方案可将噪声对系统的定位误差降低至0.007 pixel 以下,满足系统的要求[23]。
2015 年,孟立新等人设计了一种用于机载激光通信系统的粗、精复合跟踪机构,可消除平台震动。仿真结果表明,该系统的粗、精跟踪精度分别优于23.97 μrad 和7.03 μrad[24]。
2017 年,张元生等人设计了一种复合跟踪系统进行机载激光通信实验,利用单环比例-积分-微分(proportional-integral-derivative,PID)算法控制快速反射镜,实验结果表明系统的跟踪精度为10 μrad[25]。
2019 年,蔡美华进行了关于单探测型复合轴系统粗精指向瞄准的研究,通过建立一种解耦模型来实现收发两端的粗、精瞄准。实验结果表明利用该方法系统的跟踪精度可达9.69 μrad[26]。
2020 年,任斌等人研究了四象限探测器在光束捕获和跟踪系统中的应用,通过计算四象限探测器上的光斑位置来实现稳定的跟踪。实验结果表明,利用该方案系统的跟踪精度优于3 μrad[27]。
2021 年,李千等人针对粗、精跟踪的性能要求分别设计了一种反向传播(backpropagation,BP)神经网络位置检测算法和多单元阵列探测位置检测方法。实验结果表明,光斑位置检测系统的角分辨率分别为0.187 μrad 和0.903 μrad[28]。
西安理工大学在无线光通信捕获、瞄准和跟踪方面的研究进展[29-40]将于本文第4 章展开,本文所引用的国内研究进展汇总如表2 所示。

表2 国内研究进展Table 2 Domestic research progress
4 西安理工大学无线光通信系统中自动瞄准的研究进展
为了保持收发双方光端机收发视轴实时瞄准,就需要设计快速、高精度的APT 系统[29]。典型的无线光通信APT 系统如图2 所示[1]。主控制器根据收发两端的位置完成初始指向,图像处理单元根据光斑位置信息解算出二维转台的偏转角;角度控制系统实时反馈二维转台的偏转角信息;主控制器再根据反馈信息向电机发出控制命令驱动二维转台,以此实现光束的稳定对准和跟踪。2000 年以来,西安理工大学柯熙政教授团队在无线光通信APT 系统设计、光束初始捕获、光斑精确瞄准和远场光斑图像检测等典型无线光传输技术进行了深入的理论研究和实验验证,并取得了长足进展。

图2 典型无线激光通信APT 系统图[1]Fig.2 Typical wireless laser communication APT system diagram[1]
2005 年,刘长城建立和分析了大气激光通信中APT 系统内的仿真模型,设计了一种光束自动捕获系统[30];
2011 年,胡启迪设计了利用CCD 进行的信标光光斑检测方案[31];
2016 年,杨沛松提出了同轴瞄准检测方法,根据该方法设计了瞄准控制系统和跟踪系统并进行了外场实验[32];同年,赵奇设计了一种初始捕获系统,并进行了1.3 km 的外场实验[33];同年,徐尉设计了一种光斑检测系统并提出了相应的图像处理算法[34];
2017 年,李世艳提出了一种光轴瞄准方案,利用该方案可以有效提高系统检测准确度和瞄准精度[35];
2019 年,严希设计了一种光斑跟踪系统,并进行了5.2 km 的外场跟踪实验。实验结果表明系统的跟踪精度可达5.4 μrad[36];
2020 年,景永康设计了一种光斑图像检测方法,在此基础上进行了100 km 激光通信实验[37];同年,张璞在APT 系统内嵌入高精度执行机构实现了高精度的瞄准和跟踪,设计了调焦系统并进行了10.2 km和100 km 的外场实验[38]。
2021 年,梁韩立设计了可搭载于无人机上的APT系统,通过模拟机载实验平台进行了机载激光通信实验,其跟踪精度可达2.42 μrad[39];同年,柯熙政、杨尚君等人提出了一种快速瞄准方法。该方法无需将控制信号由接收端反馈至发送端,可同时完成上、下行链路的建立。并进行了1.3 km 和10.3 km 的外场实验验证[40]。
4.1 初始捕获系统
初始捕获系统主要由信标光发射器、捕获相机、数据交换模块、伺服转台以及计算机等组成。为确定捕获不确定区域的大小,做以下实验来大致估计出捕获不确定区域的大致范围。实验方位点如图3 所示,实验中有两个基准点A 和B,在点B 周围寻找10 个点C~L 作为校准点。

图3 实验方位点示意图[33]Fig.3 Schematic diagram of experimental azimuth[33]
记录点A~L 的经纬度、海拔高度数值,分别从10 个校准点指向基准点B 的方位角与俯仰角大小,与真实方位角与真实俯仰角作比较,如表3 所示[33]。为了提高捕获精度,捕获不确定区域大概为算法误差的3 倍[41]。通过计算求得系统的捕获不确定区域θFOU约为12 mrad。

表3 捕获不确定区域求解实验数据记录表[33]Table 3 Capture uncertain region to solve the experimental data record table[33]
4.2 粗精分级控制系统
粗精分级控制系统由二维云台和压电微动平台组成[42-43],结构如图4 所示。粗跟踪结构采用二维云台TGMZ-01,其方位调整范围为0°~360°,俯仰范围为−70°~70°。通过伺服电机控制两个方向上的角度调节,控制算法采用增量式PID (比例+积分+微分)算法。

图4 粗精分级控制系统[42−43]Fig.4 Composite axis pointing system[42−43]
精跟踪结构采用压电微动平台,其方位角和俯仰角可在0 mrad~0.2 mrad,0 mrad~0.4 mrad 范围内变化。
粗跟踪系统其测试结果如图5 所示。为了抑制该系统的定位误差,采用增量式PID 算法进行控制。并进行了目标角度增量为0.03°时系统的抑制误差性能测试。

图5 抑制误差前后角度增量 [43]。(a) 抑制误差前;(b) 抑制误差后Fig.5 Suppress the error before and after the angle increment[43].(a) Angle increment before error suppression;(b) Angle increment after error supperssion
图6 为粗跟踪结构的响应曲线,从结果可以看出,系统没有超调量和大幅度振荡,控制性能较为理想。

图6 二维云台响应曲线[43]Fig.6 Alignment response curve[43]
压电微动平台输入电压与角度的关系曲线如图7所示,其中图7(a)为θx方向电压与角度关系曲线,图7(b)为θz方向电压与角度关系曲线。通过线性度计算公式δ=(Δymax/y)×100%可得θx方向和θz方向上的线性度分别为0.15%、0.14%。结果可近似认为线性关系。其中Δymax为输入电压与角度位移关系曲线与理想拟合曲线的最大偏差,y为满量程输出值[43]。

图7 输入电压与角度关系曲线[43]。(a) θx 方向控制电压与角度;(b) θz 方向控制电压与角度Fig.7 The relationship between input voltage and angle[43].(a) Control voltage and angle in θx direction;(b) Control voltage and angle in θz direction
4.3 光束检测系统
光束瞄准检测系统光路图如图8 所示,光束经过一块分光棱镜后分为通信光束和位置检测光束。前者用来传递信息,后者照射在光学背投幕上成像。

图8 光束检测系统结构示意图[5]Fig.8 Structure of beam detection system[5]
光束检测的四种情况分别如图9 所示。其中α表示入射光束与天线视轴的夹角,p表示光束偏移量。通过对系统进行离焦设计,可以克服系统无法检测到光束偏移量的问题。

图9 光束检测的四种情况[5]。(a) α=0,p=0;(b) α≠0,p=0;(c) α=0,p≠0;(d) α≠0,p≠0Fig.9 Four kinds of situations of light beam detection[5].(a) α=0,p=0;(b) α≠0,p=0;(c) α=0,p≠0;(d) α≠0,p≠0
4.4 空基中继无线光通信自动跟踪控制系统
如图10 所示为收发一体的无人机中继APT 系统原理图。六旋翼无人机搭载二维反射镜和光学接收单元对地面端发出的信号进行捕获、瞄准和跟踪,最终使得两个地面端通过无人机中继平台实现双向通信。地面端1 为发射端时,地面端2 为接收端;同理,地面端2 为发射端时,地面端1 为接收端。以此来实现收发一体化的无人机中继激光通信[44]。

图10 收发一体无人机中继APT 系统[45]Fig.10 Transceiver integrated UAV relay APT system[45]
实验中信号光波长为650 nm,发射光功率为2 mW,通信速率为10 Mb/s。发射端采用OOK 调制将视频信号加载到光源上并经过发射天线准直发射输出,二维反射镜控制激光束经过透镜聚焦到通孔型四象限探测器上完成粗瞄准过程[46]。探测器再将接收到的光信号进行光电转换,信号经解调后可在计算机上观察到接收端采集的图像信息。
如图11 所示为接收端信号波形。发射端输出的信号为10 Mb/s 的方波信号,从接收端信号的波形可以看出信号没有发生较大的畸变,还是较为完整的方波信号。经过试验验证,该系统满足工作在10 Mb/s速率的性能指标。
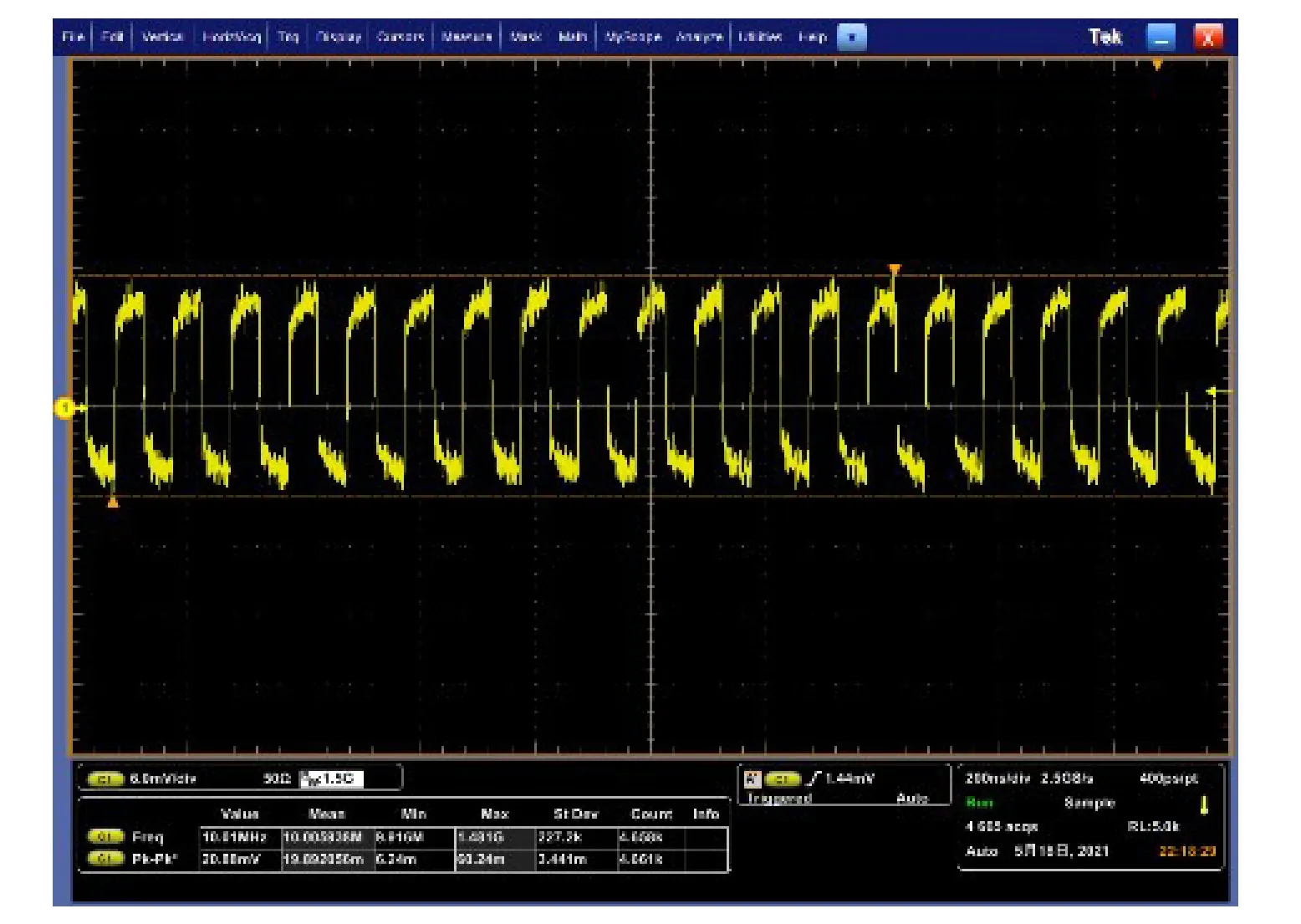
图11 接收端示波器信号波形[45]Fig.11 The signal waveform of the oscilloscope at the receiving[45]
如图12 所示为瞄准过程中光斑中心坐标位置分布。在4500 次光斑漂移后进行重新瞄准,采集光斑重新瞄准后的图像,通过图像处理得到瞄准后的光斑中心位置坐标。图中黑色“+”为目标靶心位置,蓝色坐标点为瞄准时刻光斑中心偏离目标靶心的位置。经过计算,系统的瞄准精度可达2.42 μrad。

图12 光斑中心坐标位置分布[45]Fig.12 Coordinate position distribution of spot center[45]
4.5 无线光通信捕获、瞄准和跟踪外场实验
4.5.1 1.3km 远场实验
1.3km 远场实验系统装配结构图及实物图如图13 所示。发射端位于西安理工大学金花校区的教学六楼8 层,接收端位于西安东二环凯森福景雅苑11 层[5],通信链路距离为1.3 km。该实验系统是以NexStar 8SE 天文望远镜为平台。接收天线前后分别放置一个相机用于捕获和跟踪,整个系统置于单臂云台上。

图13 1.3 km 远场实验系统装配结构图[5]Fig.13 1.3 km far-field experimental system assembly structure diagram [5]
实验所测光斑数据如图14 所示。在光斑跟踪过程中,光斑在方位和俯仰两个方向共有11 次和2 次漂出跟踪阈值。经系统调整后光斑均能重新返回坐标原点[43]。
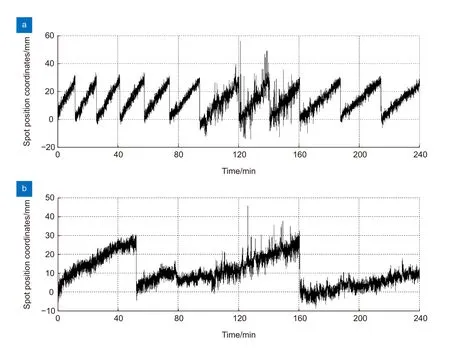
图14 光斑位置坐标 (2016-05-25 22:46~2016-05-26 22:00,小雨,13 ℃~18 ℃)[5]。(a) 方位方向;(b) 俯仰方向Fig.14 Spot position coordinates (2016-05-25 22:46~2016-05-26 22:00,rainy,13 ℃~18 ℃)[5].(a) Azimuth direction;(b) Pitching direction
4.5.2 5.2km 远场实验
5.2km 远场实验系统原理图如图15 所示[47]。计算机处理来自CCD 相机采集到的光斑图像信息并获得光斑的位置坐标,发送端接收到数据后根据光斑位置误差信息控制光学天线的指向,以此实现对光束的稳定跟踪。

图15 光斑跟踪系统原理图[47]Fig.15 Schematic diagram of beam tracking system[47]
如图16 所示为试验所测光斑数据[47],图16(a)、16(b)分别为方位、俯仰两个方向的光斑位置的漂移情况,数据采样时间为12 h。如图17 所示为试验所测光斑位置误差统计数据,图17(a)、17(b)分别为方位、俯仰两个方向的数据。

图16 光斑跟踪曲线(2017-12-05 18:00~2017-12-06 6:00,多云,−1 ℃~9 ℃)[47](a) 方位方向;(b) 俯仰方向Fig.16 Tracking curve of beam (2017-12-05 18:00~2017-12-06 6:00,cloudy,−1 ℃~9 ℃)[47](a) Azimuth direction;(b) Pitching direction
如图17 所示,从光斑漂移结果可以看出,水平、俯仰两个方向光斑分别有23 次、14 次漂出阈值,经过跟踪系统调整后光斑均能回到CCD 相机中心点位置。

图17 光斑位置误差统计(2017-12-05 18:00~2017-12-06 6:00,多云,−1°~9°)[47](a) 方位方向;(b)俯仰方向Fig.17 Statistical results of maintaining the beam position (2017-12-05 18:00~2017-12-06 6:00,cloudy,−1°~9°)[47](a) Azimuth direction;(b) Pitching direction
4.5.3 10.2km 远场实验
10.2km 远场实验系统装配如图18 所示,发射端由激光光源、光纤放大器、发射天线、二维瞄准云台及其驱动器组成;接收端由接收天线、红外CCD 相机及其控制器组成。
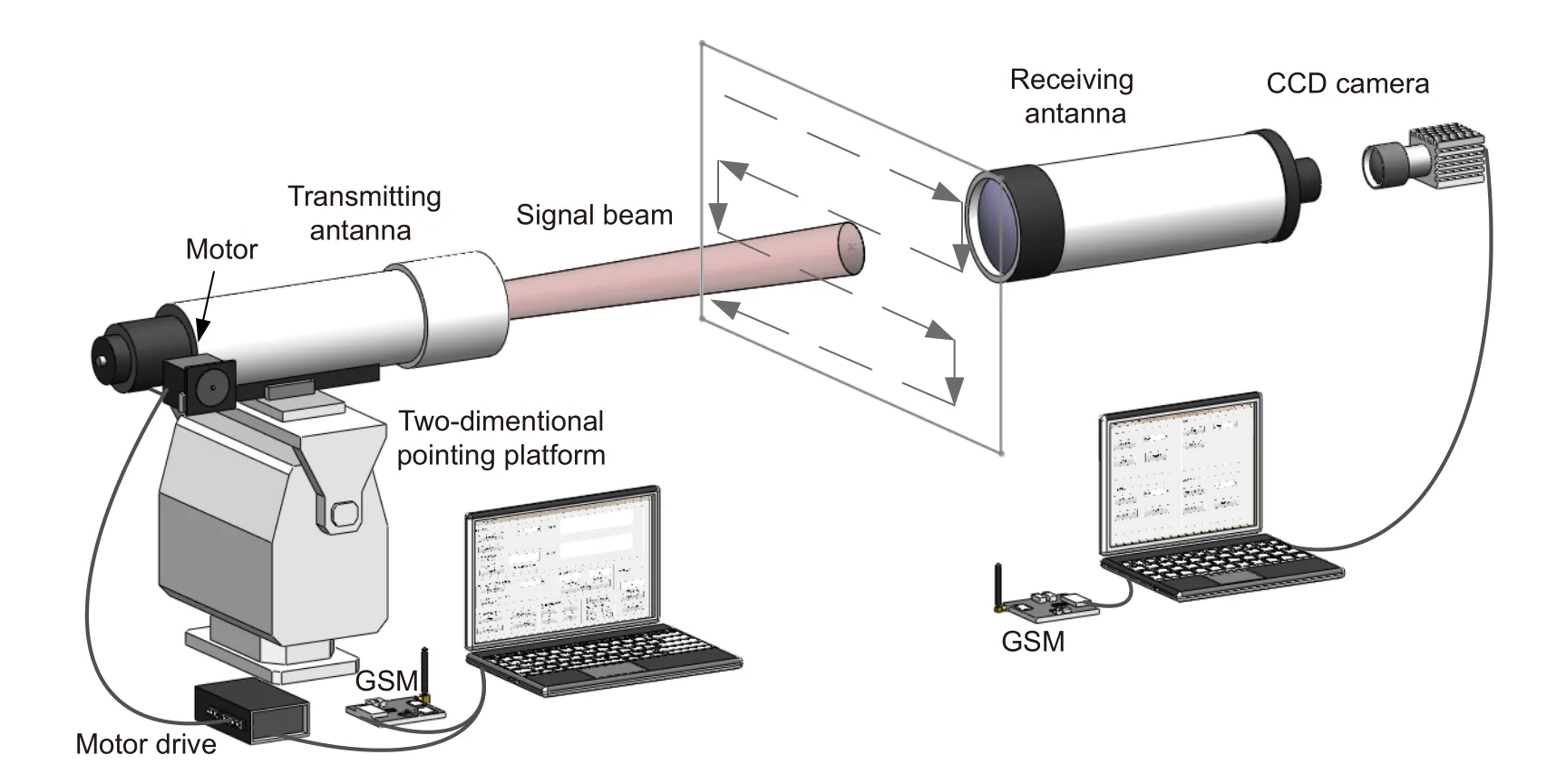
图18 10.2 km 无信标光APT 系统装配图[43]Fig.18 Assembly drawing of beacon free optical APT system of 10.2 km experiment[43]
实验过程中每隔1 min 对当前光斑图像进行一次采样,并经过图像处理后得到采样时刻光斑位置,光斑的水平与俯仰偏差是指两个不同状态下的光斑位置中心的差值。
不同天气条件下的光斑图像检测曲线如图19、20、21 所示。从结果可以看出,光斑偏移量范围为50 pixels~110 pixels[48]。

图19 光斑中心坐标曲线(2018-09-30 21:00~2018-10-01 00:00,晴,17 ℃)[48]。(a) 水平方向;(b) 俯仰方向Fig.19 Spot center coordinates curve (2018-09-30 21:00~2018-10-01 0:00,sunny,17 ℃)[48].(a) Azimuth direction;(b) Pitching direction
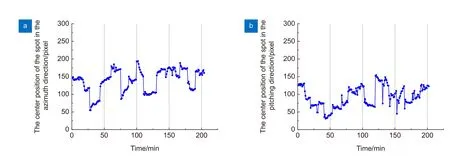
图20 光斑中心坐标曲线(2018-10-01 21:00~2018-10-02 0:00,阴,12 ℃)[48]。(a)水平方向;(b)俯仰方向Fig.20 Spot center coordinates curve (2018.10.1 21:00~2018.10.2.0:00,cloudy,12 ℃)[48].(a) Azimuth direction;(b) Pitching direction

图21 光斑中心坐标曲线(2018-10-02 21:00~2018-10-02 0:00,多云,14 ℃)[48]。(a) 水平方向;(b) 俯仰方向Fig.21 Spot center coordinates curve (2018-10-02 21:00~2018-10-02 0:00,cloudy,14 ℃)[48].(a) Azimuth direction;(b) Pitching direction
如图22(a)和图22(b)所示为实验过程中的光斑中心拟合曲线[48]。由结果可知光斑的中心位置坐标会随着外界环境的不同因素如温度、湿度和风速等而改变。
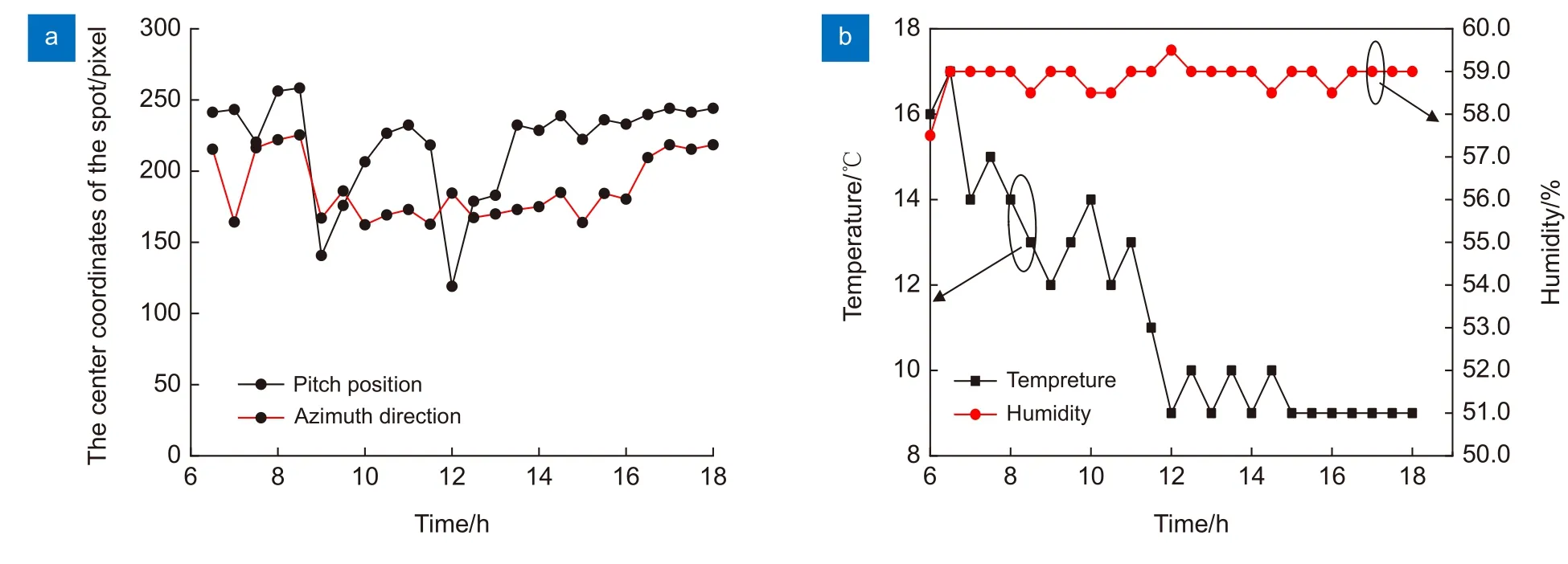
图22 光斑中心拟合曲线[48]。(a) 光斑中心位置变化曲线;(b) 温、湿度变化曲线Fig.22 Spot center fitting curve[48].(a) Change curve of spot center position;(b) Temperature and humidity curve
4.5.4 100km 远场实验
100 km 远场实验实物图及系统装配图分别如图23 所示。实验采用粗精分级控制系统,发射端位于青海湖南岸共和县二郎剑景区,海拔高度4015 m;接收端位于青海湖北岸的刚察县泉吉乡,海拔高度3955 m[43]。信号光波长为1550 nm,系统采用双发单收结构。
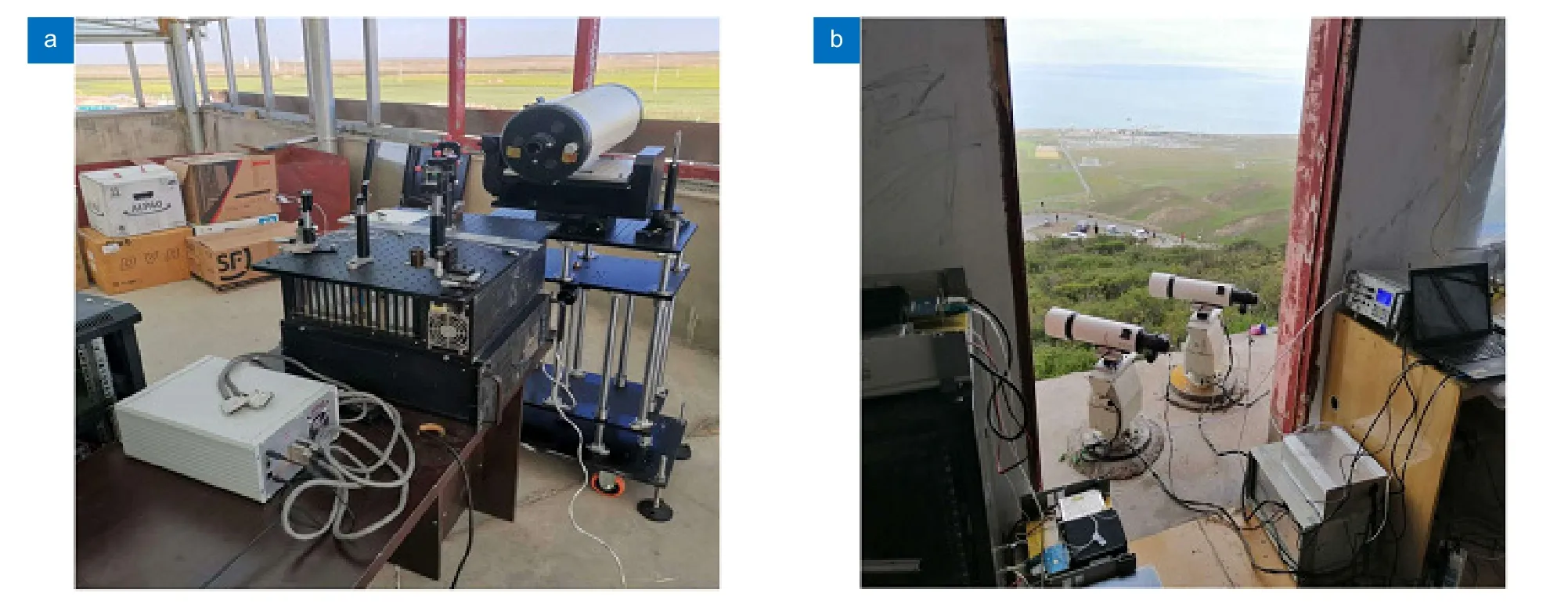
图23 100 km 外场实验场景[48]。(a) 接收端;(b) 发射端Fig.23 100 km field experiment scene[48].(a) Receiving terminal;(b) Transmitting terminal
100 km 外场实验也采用矩形扫描的方式进行光束捕获,瞄准和跟踪过程与10.2 km 远场实验类似。
光斑中心位置的变化曲线如图24、25 所示。从光斑中心位置变化结果可以看出:由于大气湍流效应的影响和通信链路距离的增加,系统的跟踪和瞄准也更困难。

图24 光斑中心坐标变化曲线(第一次实验)[48]。(a) 水平方向检测光斑中心坐标;(b) 俯仰方向检测光斑中心坐标(2019-08-18 23:00~2019-08-19 02:00,晴,14 ℃)Fig.24 Spot center coordinate change curve (The first experiment) [48].(a) Spot center coordinates in horizontal direction;(b) Spot center coordinates in pitch direction (2019-08-18 23:00~2019-08-19 02:00,sunny,14 ℃)

图25 光斑中心坐标变化曲线(第二次实验) [48]。(a) 水平方向检测光斑中心坐标;(b) 俯仰方向检测光斑中心坐标(2019-08-20 23:00~2019-08-20 02:00,阴转小雨,9 ℃)Fig.25 Spot center coordinate change curve (The second experiment) [48].(a) Spot center coordinates in horizontal;(b) Spot center coordinates in pitch direction (2019-08-20 23:00~2019-08-20 02:00,cloudy and rainy,9 ℃)
4.6 收发非共视轴二维反射镜快速瞄准系统
如图26 所示为快速瞄准系统原理图。通过改变二维反射镜的偏转角来实现光束扫描,主控计算机获得光斑的位置信息后,向电机发送控制命令,电机驱动二维反射镜使光束与接收天线实时瞄准,以此实现稳定的跟踪[40]。
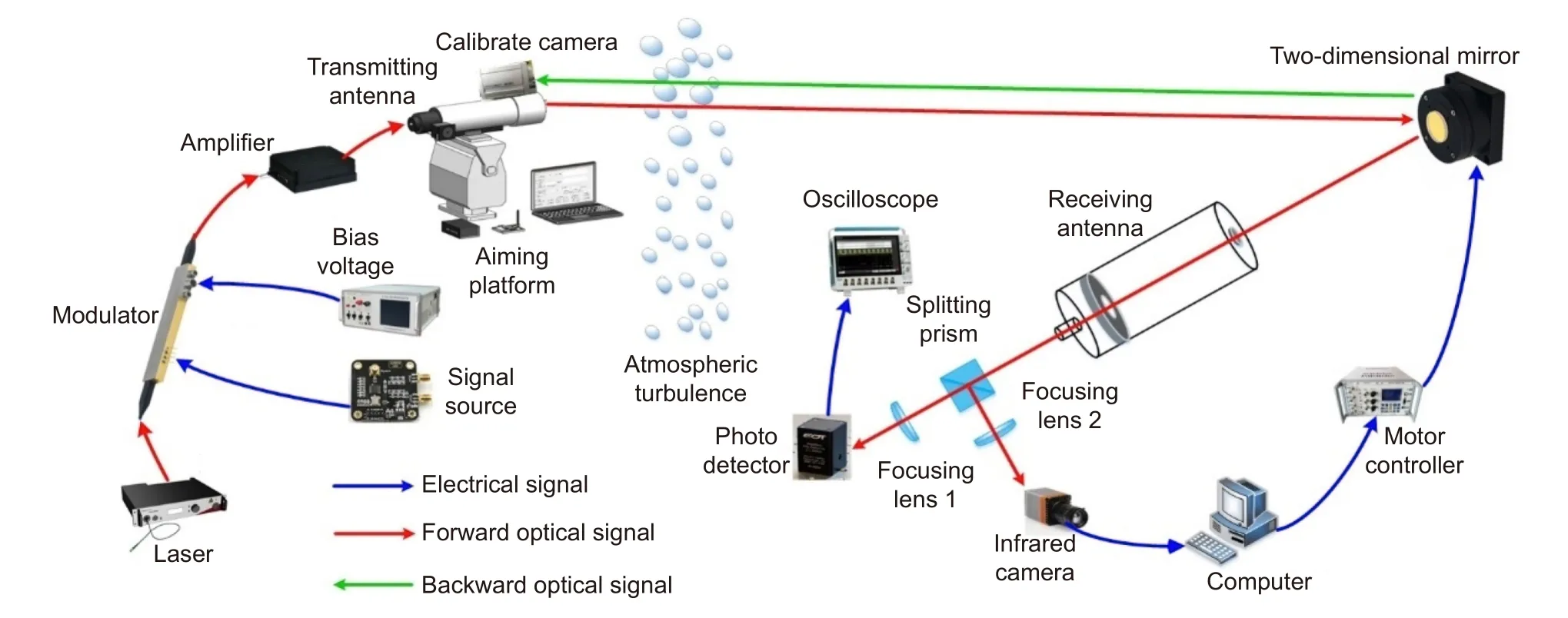
图26 利用二维反射镜实现快速瞄准的IM/DD 无线光通信系统[40]Fig.26 Wireless optical communication IM/DD system with fast alignment of two-dimensional mirror[40]
利用该系统进行的远场实验通信链路如图27所示。发射端和接收端分别位于西安市白鹿原肖寨村和西安理工大学金花校区教学6 楼,通信链路长度10.3 km。
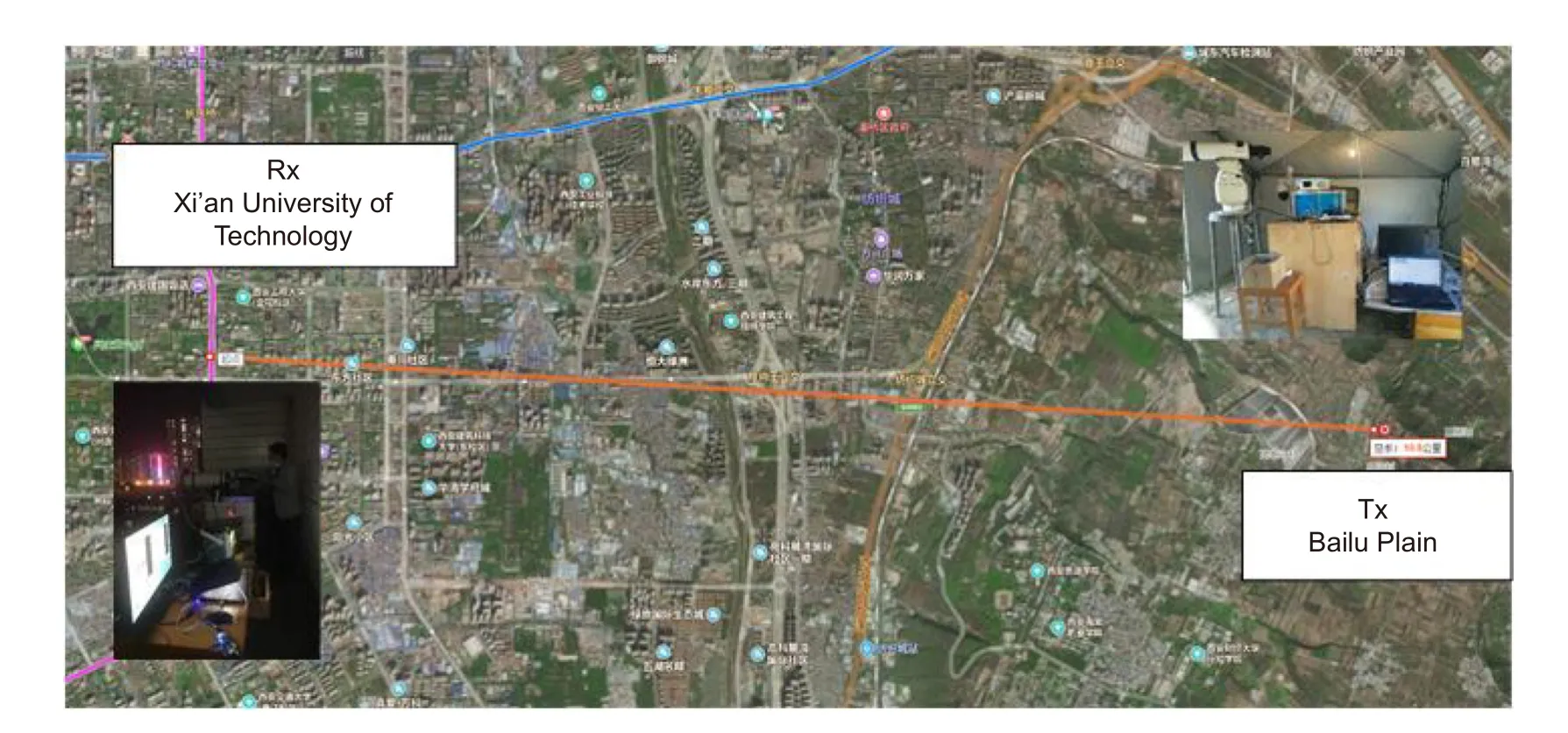
图27 10.3 km 无线光通信实验链路图[40]Fig.27 Experiment of wireless optical communication for 10.3 km[40]
如图28 所示为二维反射镜位置坐标的光束跟踪曲线,其中X表示俯仰方向,Y表示水平方向,二维反射镜在俯仰方向和水平方向分别调整了4 次、2 次。
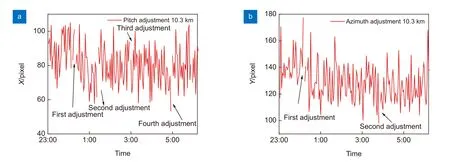
图28 光束跟踪曲线(2021-07-24 23:00~2021-07-25 6:00)[40]。(a) 俯仰方向;(b) 水平方向Fig.28 Beam tracing curve (2021-07-24 23:00~2021-07-25 6:00)[40].(a) Pitching direction;(b) Azimuth direction
当光斑逐渐移动至相机中心点时,计算俯仰和方位方向上光斑中心位置坐标变化的均值、方差以及功率谱密度估计(power spectral density,PSD)。结果如图29 所示,由结果可以看出光斑的中心位置坐标在方位方向上漂移量大于俯仰方向上的漂移量。

图29 功率谱密度估计[40]。(a) X 方向;(b) Y 方向Fig.29 Power spectrum density estimate[40].(a) X position;(b) Y position
如图30 所示为跟踪过程中光斑的运动轨迹以及对应的PSD。由结果可以看出光斑在俯仰和方位方向上的方差分别为14.4970 pixel2、8.0287 pixel2。
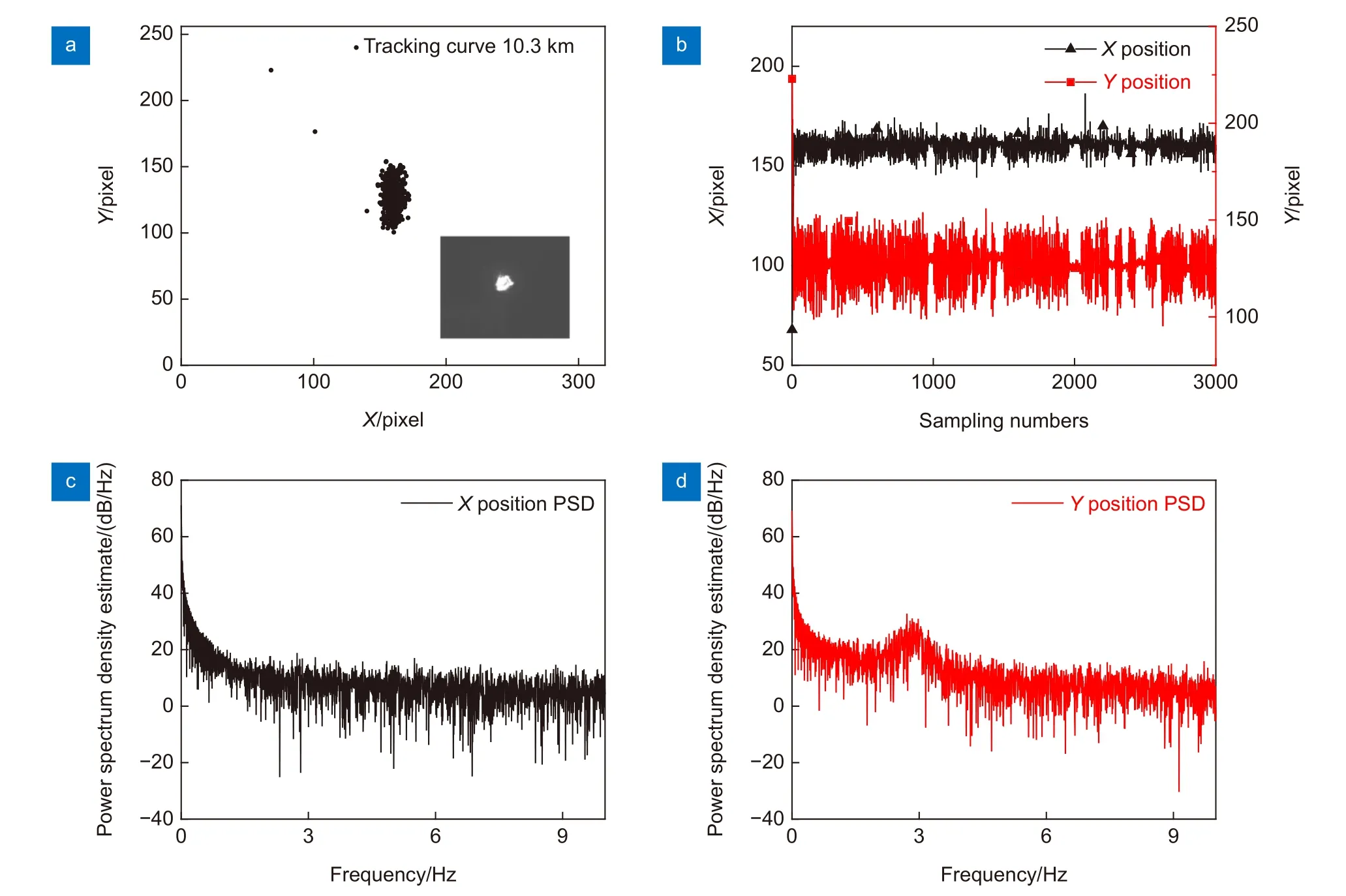
图30 光斑跟踪曲线及PSD[40]。(a) 光斑跟踪曲线;(b) 方向跟踪曲线;(c) X 方向功率谱密度估计;(d) Y 方向功率谱密度估计Fig.30 Spot tracking curve and PSD[40].(a) Curve of the beam tracking;(b) Curve of the beam tracking in X and Y directions;(c) X PSD;(d) Y PSD
如图31 为收发两端的信号波形。发射端功率为200 mW,当跟踪过程结束后,探测器进行光电转换输出的信号波形幅值为74.4 mV。

图31 收发两端信号波形[40]。(a) 发射信号;(b) 接收信号Fig.31 Receive and transmit signal waveforms[40].(a) Transmitting signal;(b) Receiving signal
4.7 不同系统总结分析
本章节总结了西安理工大学在APT 方面的研究进展,分别介绍了初始捕获系统、粗精分级跟踪系统、光束检测系统、空基中继无线光通信自动跟踪控制系统、收发非共轴二维发射镜快速瞄准系统的工作原理及实验分析。根据其应用场景不同,现将其总结如下:
4.1~4.3 节分别针对捕获、瞄准和跟踪各个阶段的实际需求设计了初始捕获系统、粗精分级控制系统和光束检测系统。其中初始捕获系统通过位置校准法即可实现快速捕获,无需传统捕获系统中的定位装置,减少了捕获时间和系统设计成本;粗精分级控制系统采用“二维云台+压电微动平台”作为跟瞄执行机构,可以抑制未经粗跟瞄机构消除的瞄准和跟踪残差,进一步提高跟瞄精度,其应用场景在4.5.4 节中进行了详细介绍;光束检测系统利用光斑质心、形心位置等数据,可计算出试验过程中光束在俯仰、方位两个方向上的偏移量。
收发非共轴二维反射镜快速瞄准系统发射端采用相机标定,接收端通过控制二维反射镜对光束进行扫描,以光斑的位置信息作为反馈信号进行跟踪。传统的长轴瞄准将探测器处的光斑位置信息进行远距离回传反馈,容易受到大气湍流的影响。该系统利用图像作为反馈信息调整发射天线的角度,无需进行数据回传,可以实现快速瞄准且受外界环境影响较小。
由不同距离下的无线光远场通信实验可以看出,随着通信链路距离的增长,对APT 系统的伺服带宽、俯仰方向和方位方向的自由度和分辨率等都会有更高的要求,这也是限制APT 系统工作距离的主要原因。例如:在10.2 km 远场实验中,发射端仅采用二维瞄准云台作为执行机构即可完成瞄准和跟踪,其分辨率约为17.45 μrad;而在100 km 远场实验中,为了达到相应的精度要求,采用二维云台和压电微动平台组成的粗精分级控制系统来完成瞄准和跟踪,压电微动平台的分辨率约为0.01 μrad。
5 无线光通信系统的APT 发展展望
无线光通信系统的APT 发展的方向包括以下几个方面:
1) 信标光与信号光合并为一路信号,取消信标光;
2) 采用发射天线与接收天线非共光路结构,抑制大气湍流对光束对准的影响;
3) 将发射端和接收端紧耦合对准变为发射端和接收端独立控制,不需要将位置信息传送给对方;
4) 将发射端和接收端瞄准、捕获与跟踪功能分解,发射端负责粗瞄准,接收端负责精瞄准与跟踪,接收方自主调整光路,抑制大气湍流对光斑漂移的影响[40]。
本文系统地分析了无线光通信中APT 系统的发展与应用,并对西安理工大学在该领域的研究进展及成果进行了介绍。包括对设计的初始捕获系统、粗精分级控制系统和光束检测系统的性能进行了实验分析和验证。实验结果表明,该系统可以有效地实现快速捕获和瞄准,系统的跟踪和瞄准精度都得到了极大改善,提高了APT 系统的有效性和可靠性。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
科学技术创新(2021年7期)2021-03-23
无线电工程(2020年9期)2020-08-31
无线电工程(2020年8期)2020-07-25
河北省科学院学报(2020年4期)2020-03-19
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
科技与创新(2019年11期)2019-09-05
