
太阳极紫外He II 30.4 nm 谱线层析成像及其光谱数据反演*
2022-08-12 14:28邢阳光彭吉龙段紫雯闫雷李林刘越
物理学报 2022年15期
邢阳光 彭吉龙 段紫雯 闫雷 李林† 刘越‡
1) (北京理工大学光电学院,北京 100081)
2) (北京卫星环境工程研究所,北京 100094)
3) (北京宇航系统工程研究所,北京 100076)
由磁场重联触发的发生在日冕和过渡区域上的具有高度动态的太阳爆发活动是灾害性空间天气的驱动源,对太阳爆发活动的空间成像和光谱分光测量是实现精准空间天气预报的关键数据来源.太阳大气上单离子氦的Lyman α 跃迁产生波长30.4 nm 的He II 共振谱线,相比于邻近的谱线强度至少高一个数量级,因此能用来观测太阳爆发事件中的物质流动和能量输运过程.本文针对传统的太阳极紫外成像仪和成像光谱仪的缺陷,利用光线追迹方法设计了一款工作在He II 30.4 nm 波长处的二维光谱层析成像仪器,采用无狭缝的3 个级次(–1,0,+1)同时衍射成像架构,单次快照可实现大视场的二维光谱瞬时成像.由于3 个级次图像的空间信息和光谱信息混叠,利用有限层析投影角度的光谱数据反演算法,重构了观测目标的三维数据立方体I (x,y,λ).
1 引言
随着科学技术的迅速发展,日地空间已成为人类生存和发展的重要活动场所[1].以强太阳耀斑和日冕物质抛射(CMEs)为代表的太阳爆发事件是灾害性空间天气的驱动源,会引起地球空间环境发生灾害性变化,进而影响人类地面及空间技术系统的安全和运行的可靠性[2].2002 年美国发射的拉马第高能太阳分光成像谱仪(RHESSI)经过十几年的观测表明[3,4],太阳耀斑是发生在太阳大气局部区域的一种最剧烈的爆发活动,在短时间内释放大量能量,引起局部区域瞬时加热从而向外辐射的X 射线、极紫外谱线强度明显增强.而CMEs 爆发时,一次抛射可释放多达1032erg (1 erg=10–7J)的能量和1015—1016g 的太阳磁化等离子体到行星际空间,抛射速度可达50—1200 km/s 并且伴随10 keV—1 GeV 的高能粒子流.增强的电磁辐射、高速的磁化等离子体以及高能太阳粒子对日地空间环境的安全性造成严重威胁.开展太阳的光谱学观测(包括成像与分光光谱测量),不仅是人类社会面临发展高科技以及国家安全的巨大需求,同时还是构建空间天气事件发生、发展、传播和影响的完整物理图像的关键数据来源,对形成空间天气预报的理论框架和发展实时的空间灾害性天气预警系统具有重要意义.
太阳爆发活动期间,日冕上的磁化等离子体具有高度的动态性并辐射出增强的极紫外(EUV)10—120 nm 谱线.EUV 波段的辐射线能表征太阳外层大气中等离子体从104—107K 的温度特性,通过拟合在极紫外观测波段的辐射谱线轮廓来获得谱线强度、宽度和多普勒频移,光谱成像观测提供了对太阳等离子体特征的精确测量,包括等离子体的温度、流速、密度、元素丰度等.国际上对太阳极紫外观测仪器的重视较早,发展了一系列包括流量、成像和光谱的观测仪器.1962—1975 年美国发射的轨道太阳天文台 (OSO) 系列的8 个卫星上都搭载有极紫外窄波段单色光照相仪和成像光谱仪[5,6].1989—1997 年期间,美国NASA 的戈达德空间飞行中心研制的探空火箭仪器SERTS 完成了5 次飞行任务[7−9],SERTS 的前置望远系统采用掠入射的Wolter Type II 望远镜,分光系统采用超环面等线距光栅,仪器观测波段覆盖17—45 nm,光谱分辨率优于0.01 nm,空间分辨率可达6 arcsec.1995 年美国和欧洲共同发射了SOHO 卫星,其上搭载的极紫外成像光谱仪SUMER[10]和CDS[11]光谱分辨率可达0.0045 nm,空间分辨率可达1 arcsec.2006 年由日本、英国和美国联合研制的太阳观测卫星Hinode 成功发射升空[12],其上搭载的正入射狭缝式成像光谱仪EIS 可同时实现对双波段(17—21 nm 和25—29 nm)的光谱消像散成像[13],仪器的主镜为离轴抛物面镜,分光元件为刻线密度为4200 lines/mm 的超环面等线距光栅,仪器空间分辨率为1 arcsec,最高光谱分辨率可达0.0022 nm.2010 年美国NASA 发射了太阳动力学天文台 (SDO)卫星[14],其上搭载的太阳大气成像组件 (AIA) 仪器可获得多个极紫外波长下的太阳单色像[15],仪器由4 个Cassegrain 望远镜构成,空间分辨率1 arcsec,时间分辨率10—12 s,仪器视场41 arcmin.2020 年2 月由欧洲空间局和美国NASA 联合研制的太阳轨道飞行器SOLO 成功发射升空[16],其上搭载的SPICE 仪器是双波段(70.4—79.0 nm 和97.3—104.9 nm)狭缝式成像光谱仪[17],仪器由前置离轴抛物面主镜和超环面变线距(TVLS)光栅次镜组成,狭缝位于离轴抛物面的聚焦平面上,主镜具有43.5 mm 的通光口径,仪器最高的空间分辨率为1 arcsec,光谱分辨率优于0.01 nm.
作为空间技术大国,与国际上的太阳空间探测相比,中国处在明显落后的地位[18].从太阳空间观测的专门科学卫星角度看,除了2021 年10 月14 日成功发射的用于试验的“羲和号”卫星外,中国尚没有发射过一颗太阳探测的专用卫星,聚焦于“一磁两暴”科学目标的“先进天基太阳天文台”(ASO-S)预计于2022 年发射[19].从太阳极紫外仪器的角度看,尽管中国的一些太阳空间探测计划中包含有极紫外载荷,比如“夸父A 星”上的计划载荷包含有极紫外成像仪[20]、“夸父B”上的计划载荷包含有极紫外成像光谱仪[21]、“太阳过渡区卫星探测任务”中的初步方案包括35—105 nm 范围内的窄带成像和高分辨率光谱探测[19]、“太阳极区探测器”(SPORE)的计划载荷包括大视场极紫外成像仪和极紫外光谱仪[19]等,但除了“风云三号E 星”装备的“太阳X 射线和极紫外成像仪”(X-EUVI)以外,目前中国还没有极紫外波段的仪器在轨运行.XEUVI 仪器可获得19.5 nm 波长下的全日面单色像,对于中国的太阳物理研究和空间天气预测具有重要意义.
现有的极紫外成像仪和狭缝式光谱仪在太阳观测时都有各自的局限性.由窄带滤光片和多层镀膜构建的极紫外成像仪器,尽管单次快照可同时提供二维大视场范围内的高空间和高时间分辨观测,但无法得到高光谱分辨信息.由窄狭缝和衍射分光元件构建的光谱仪器,通过窄狭缝耗时的扫描实现二维日面光谱成像的重构,空间信息和时间信息严重混叠,尽管仪器具有高光谱和高空间分辨性能,但具有受限的时间分辨率.本文针对现有极紫外仪器在观测上的弊端,利用光线追迹方法设计了一款工作在极紫外He II 30.4 nm 波长处的二维光谱层析成像光谱仪,这样的新型光谱层析成像方式抛弃了传统的用于视场扫描的狭缝,采用3 个级次(+1,0,–1)的无狭缝衍射成像架构,系统同时具有大的二维瞬时视场、高时间、高空间和高光谱分辨率.本文首先论述了太阳极紫外层析成像的优势,然后基于系统的基本架构和初始参数,利用光线追迹来实现全局最优化设计,最后利用一种基于先验信息的光谱数据反演算法来消除空间和光谱的混叠,提取二维光谱分辨率信息.
2 极紫外光谱层析成像优势
所有的成像光谱仪都是为了得到观测目标的空间信息I(x,y)和光谱信息I(λ),也就是二维空间加上一个光谱维的三维立方体数据I(x,y,λ),如图1 所示,立方体的x轴和y轴代表空间信息,λ轴代表光谱信息.由于平面探测器(CCDs)成像只能得到一个二维的信息,因此传统的狭缝扫描式成像光谱仪不得不通过耗时的推扫将一个个的二维数据拼凑成一个三维数据(图1 所示的粉色部分),这个扫描过程直接导致得到的立方体数据在时间上不是同步的,系统不具有高时间分辨率,无法捕获太阳过渡区域和日冕的快速演化过程,比如Hinode 卫星上搭载的仪器EIS[13],SOLO 卫星上搭载的仪器SPICE[17]等都属于该类仪器.尽管极紫外多层膜成像仪能够实现大二维视场和高时间分辨率的观测,但却具有极低的光谱分辨率(λ/Δλ≈ 50),无法通过光谱数据反演提取光谱信息(图1 所示的黄色部分),比如SDO 上搭载的仪器AIA[15]等都属于该类仪器.而本文设计的极紫外层析成像光谱仪相当于将整个立方体在3 个方向进行投影,CCDs 记录的将是一个个二维的投影信息,通过3 个投影信息利用光谱反演算法可以重建原来的数据立方体(图1 所示的蓝色部分),这种成像方式去除了扫描过程,在投影中都是同一时间维的立方体数据,因此这样的光谱层析成像通过无狭缝的设计克服了传统狭缝扫描式成像光谱仪在空间和时间上的信息混叠,通过3 个衍射级次同时成像和光谱数据反演算法消除了多层膜成像仪在空间和光谱上的信息混叠.这样的层析成像方式同时具有高时间分辨率、高空间分辨率和高光谱分辨率,是目前可以实现对发生在日面区域上的爆发活动的空间形态和三维速度同时进行高分辨率成像的最佳方案,获取前所未有的新资料.
3 层析成像光谱仪设计原理
由于正入射下的极紫外多层膜反射效率普遍较低,而且极紫外探测器的量子效率也不高,因此光谱仪系统应尽可能地减少反射和衍射光学元件的使用以提高仪器传输效率.如图2 所示为整个系统的基础架构,前置望远主镜采用离轴抛物面单镜(OPM),在二维视场内汇聚成像于视场光阑上(无狭缝),分光次镜采用反射式超环面变线距(TVLS)光栅,同时提供+1,0 和–1级次的分光色散,最终衍射成像在3 个探测器焦面上.
3.1 系统初始解
窄波段29.4—31.4 nm 作为层析光谱仪的观测波段,而中心波长He II 30.4 nm 作为光谱数据反演的目标谱线,日面上10 arcmin×10 arcmin 的二维区域为层析光谱仪的瞬时观测视场.图2 中OPM的通光口径为D,离轴量为Δ,曲率半径为RT,则根据几何光学原理,可知前置望远系统焦距fT满足如下关系:

图3 为TVLS 光栅的示意图,X轴为光栅法线并相交于光栅顶点于O,Y轴为光栅色散方向,Z轴为光栅刻线方向.超环表面在Y方向上的半径为R,在Z方向上的半径为ρ,光栅刻线的密度分布沿Y轴不均匀变化且服从多项式分布.
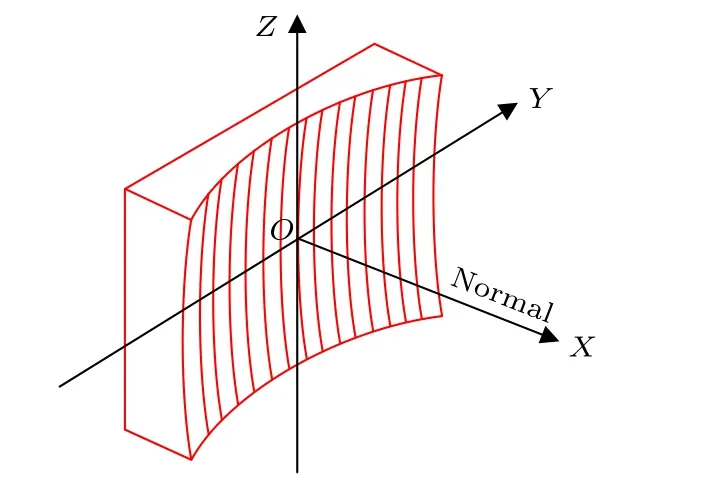
图3 TVLS 光栅示意图Fig.3.Schematic of toroidal varied line space grating.
TVLS 光栅的面型方程和刻线密度分布方程为
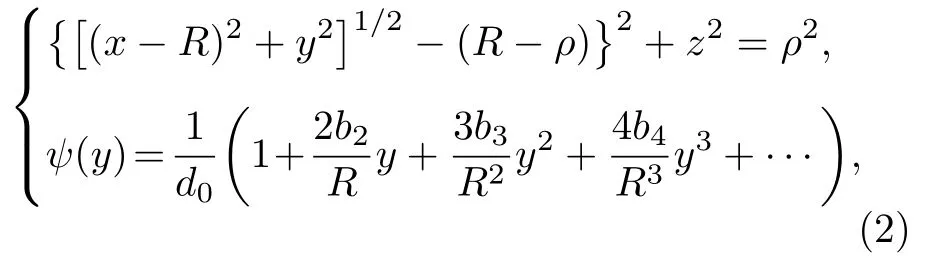
其中ψ(y)为光栅表面任意处的刻线密度;d0为原点O处的刻线间距;b2,b3,b4,···是刻线密度的空间变化参数.
图2 中i为光栅入射角,θ为光栅衍射角,点A为视场光阑的中心,|AO|=rA为光栅的入射臂长,|OB|=rB为光栅的出射臂长.若已知观测波段范围λ1—λ2,中心波长λ0,入射臂rA、光栅中心刻线间距d0和光栅横向放大率β,则根据光栅离轴像差和像散的校正条件可得层析光谱仪系统的初始解为

其中f为光谱仪系统焦距;m为光栅衍射级次;θ1,θ2和θ0分别为边缘波长λ1、边缘波长λ2和中心波长λ0的衍射角;为了获得线性变化的TVLS 光栅刻线密度分布,bk=0 (k=3,4,···).
3.2 系统光线追迹
利用系统的初始解,可以显著提高优化时的准确性和保证快的收敛速度,利用ZEMAX 中的多重结构建立系统在+1,0 和–1级次下的同时衍射成像,通过模拟退火算法对3 个级次在空间和光谱方向进行全局优化设计.采用硅基滤光片来抑制可见光,同时为了提高正入射下极紫外的反射效率,光学元件表面使用相同的周期性SiC/Mg 多层膜.最终优化后的层析光谱仪系统光路布局见图4,仪器的技术指标和系统参数见表1,根据(4)式可以计算得到系统的空间分辨率优于0.42 arcsec,光谱分辨率优于0.003 nm,探测的视向速度大于29.61 km/s.
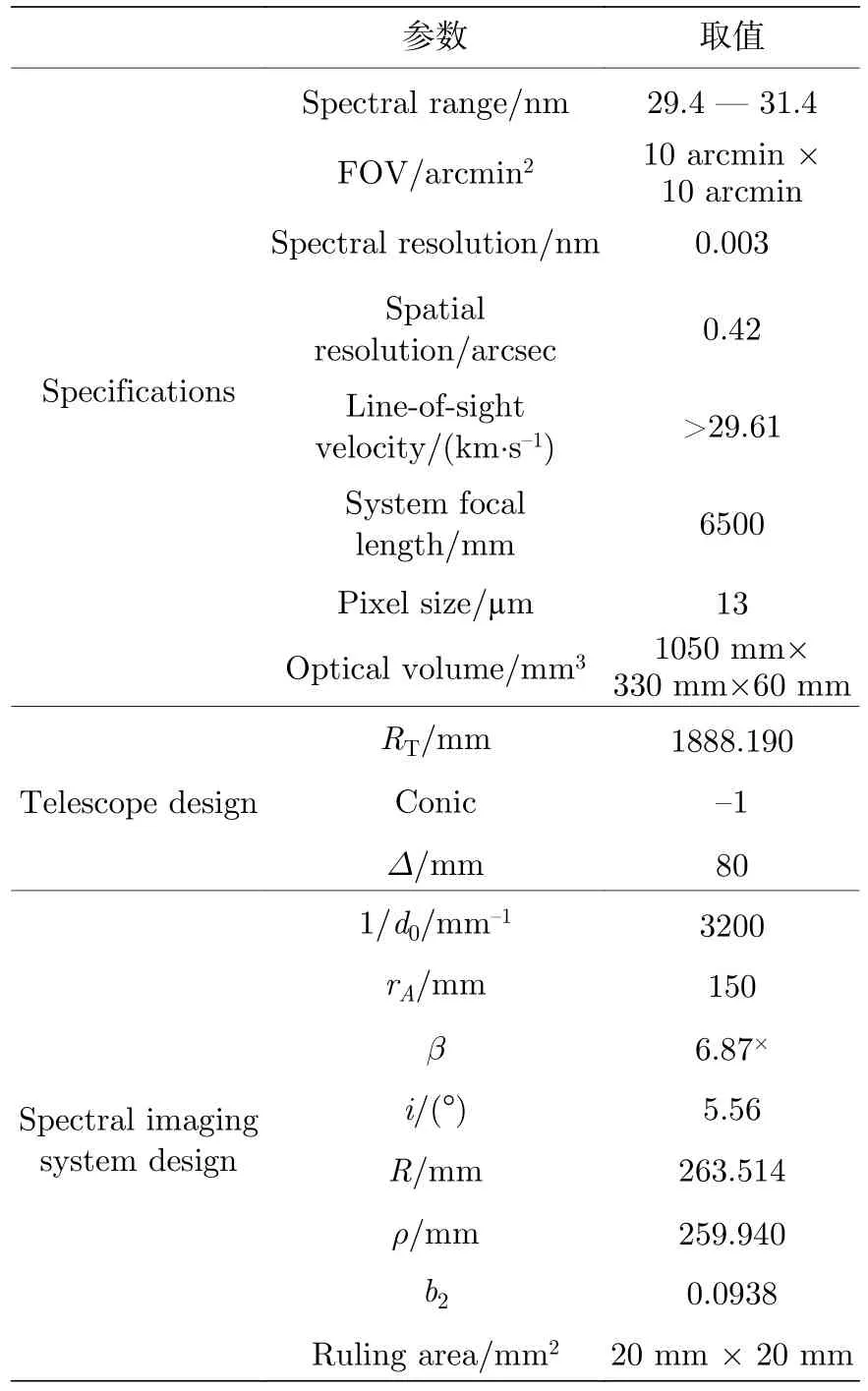
表1 层析成像光谱仪的技术指标和系统参数表Table 1.Specifications and system parameters for tomographic imaging spectrometer.
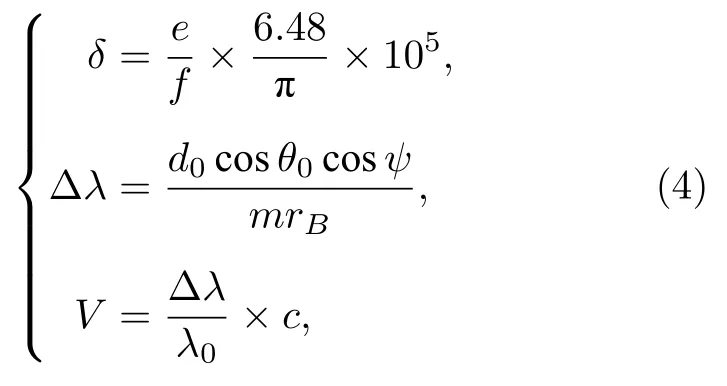

图4 太阳极紫外层析成像光谱仪光路原理图Fig.4.Optical layout of solar EUV tomographic imaging spectrometer.
式中,δ是以角秒为单位的空间分辨率,e为像元尺寸,Δλ为光谱分辨率,ψ是探测器的倾斜角度,V是等离子体的视向速度,c为光速.
图5—图7 分别为–1,0 和+1级次系统在目标谱线He II 30.4 nm 处的像面均方根(RMS)点列图分布,图中“3×3”阵列的黑色方框代表尺寸为13 µm 的像素,而“3×3”阵列的黑色圆代表衍射极限的艾里斑.可知TVLS 光栅在全视场范围内实现了很好的像差校正,系统在30.4 nm 处的成像接近衍射极限.
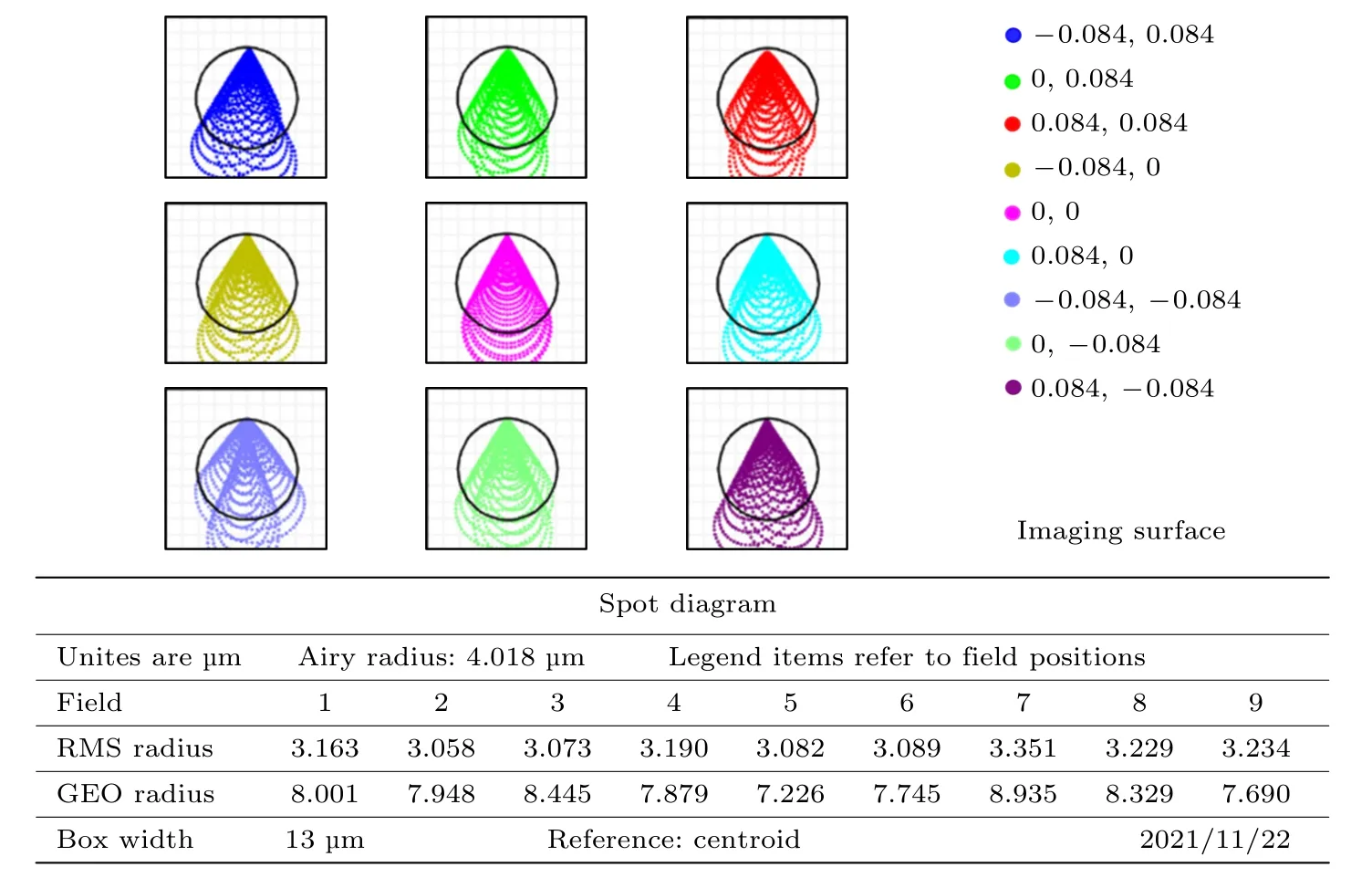
图6 0级次像面上的均方根点列图Fig.6.RMS spot diagram in 0 order imaging surface.

图7 +1级次像面上的均方根点列图Fig.7.RMS spot diagram in +1 order imaging surface.
4 光谱数据反演
太阳爆发活动的变化时标非常短,而层析成像光谱仪最显著的一个性能优势是可以瞬时获取二维日面内太阳爆发活动的三维速度.太阳爆发活动期间伴随着等离子体的剧烈运动,由于等离子体和成像光谱仪之间的相对运动,会形成明显的多普勒效应,多普勒效应对谱线造成的影响称为谱线偏移(红移或蓝移).等离子体在成像平面内的速度可以通过连续多次曝光观测其空间形态变化而得到,而视向速度(多普勒速度)则需要利用若干角度的层析投影分析谱线的偏移情况得到,这正是层析成像光谱仪所要反演的主要目标.
4.1 有限角度的层析投影
太阳极紫外层析成像光谱仪对日面爆发活动的成像过程相当于对二维目标在3 个衍射级次上同时进行了3 次不同方向的层析投影,而数据反演的目的就是通过这3 个层析投影反演出观测的二维目标.对于同一空间区域,其光谱信息的差异将集中体现在色散方向上,如图8 所示,在数据重建时配准3 个维度的空间信息后,固定一个非色散的空间维y=y0,取出发生色散的空间维x进行反演,这样就可以将二维反演三维的问题简化为若干次的一维反演二维的问题.因此,对于太阳上目标G(x,y,λ)经过层析成像光谱仪在不同衍射级次m的投影后形成的像可描述为
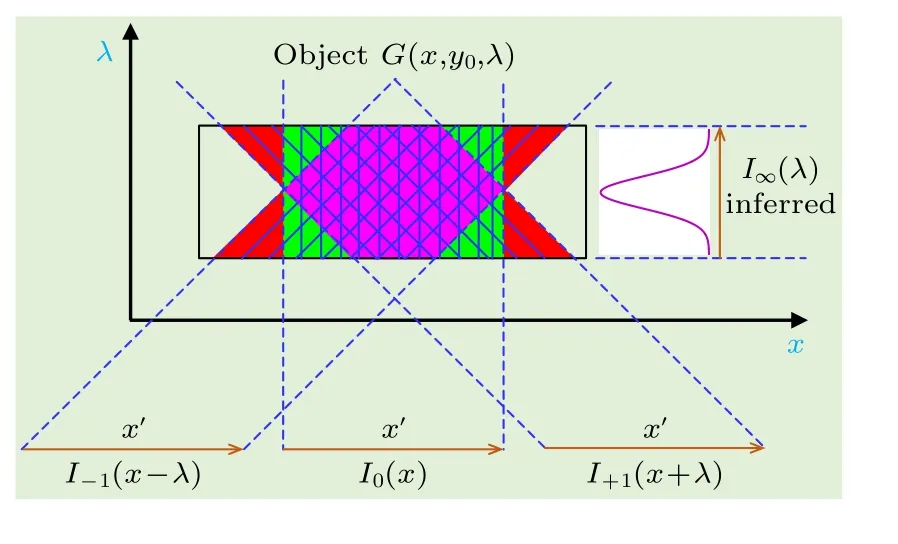
图8 反演目标G(x,y0,λ)的有限角度层析投影Fig.8.Limited angle tomography projection for inversion object G(x,y0,λ).
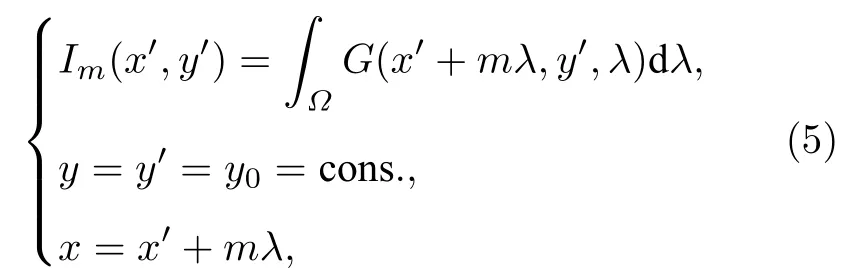
其中 (x′,y′) 是探测器上的坐标,(x,y)是仪器视域内太阳上的坐标,积分域Ω是仪器的带通,各参数均以像素为单位.
仅通过3 个不同角度的层析投影反演出原始的三维数据立方体,存在较差的反演精度.如图8中,绿色区域中仅包含两个级次的投影信息,而红色区域仅有一个级次的投影信息,信息量缺失的区域会降低反演的精度.仪器光谱带宽越大,其反演的病态程度越严重;光谱带宽越窄,可减少信息量缺失的区域,因此为了保证整个反演的精度,光谱仪系统必须具有窄的带宽.
根据过去SDO 卫星上的EVE 仪器对极紫外辐射强度的观测表明[22],He II 30.4 nm 的强度高于其临近谱线强度20 倍以上,如图9(a)所示,谱线FWHM 线宽为97.8 mÅ,谱线强度约为36000 erg/(cm2·s·sr),且谱线轮廓服从高斯分布,如图9(b)所示.尽管在29.4—31.4 nm 的仪器带宽内有若干条极紫外发射谱线(如Si IX 29.61 nm,Fe XII 31.22 nm等),但认为仪器带宽内仅有He II 30.4 nm 一条谱线.将上述过去观测的He II 30.4 nm 相关谱线信息作为先验信息用于层析成像光谱仪的光谱数据反演,先验信息的加入相当于已知仪器带宽内的谱线强度分布,如图8 所示,等同于仪器在无穷大衍射级次上(90°投影方向)具有一个新投影,整个反演过程就变成了4 个层析投影角度的反演,这样光谱数据的反演才更加精确和具有实用性.
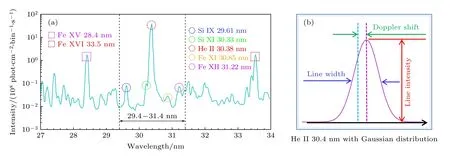
图9 太阳极紫外光谱图 (a)仪器带宽内的谱线强度分布;(b) He II 30.4 nm 谱线高斯轮廓分布Fig.9.Solar extreme ultraviolet spectrogram:(a) Spectral lines intensity distribution in instrument bandwidth;(b) Gaussian distribution of He II 30.4 nm spectral line profile.
4.2 SMART 算法
“乘法代数重建技术”(MART)常用于具有上千投影角度的医用CT 扫描仪的影像重建,针对仅具有4 个投影级次的层析成像光谱仪,在“MART”算法的基础上加入一个平滑处理过程,利用平滑算子对反演图像进行一个类似卷积的操作,形成“平滑乘法代数重建技术”(SMART)使得反演过程具有更快的收敛速度和准确性.“SMART”算法采用迭代的思路,由初始值开始,通过迭代使结果一步一步向最优方向靠近.用G(x,λ)来表示数据反演的目标,P表示投影操作,Im代表层析投影的成像,其具体算法流程如表2 所列.
表2 中,N是0级投影图像上的总像素数,γ是为了防止由于噪声引起的数值不稳定而引入的修正因子且γ<0,t和s分别为波长λ轴和色散x轴的平滑参数,χ2是平滑参数t和s的调整因子,同时也是循环迭代终止的判据.
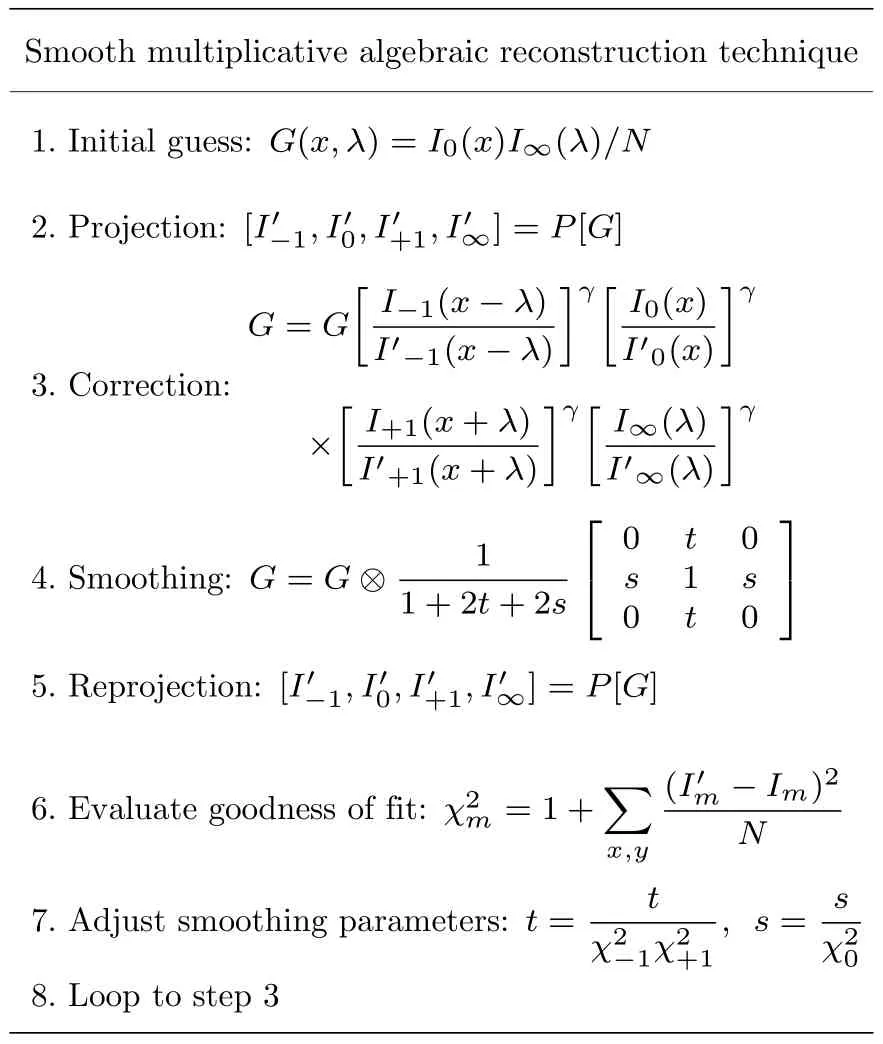
表2 层析成像光谱仪的数据重建算法SMARTTable 2.Data reconstruction algorithm SMART for tomography imaging spectrometer.
4.3 反演结果与评价
利用MATLAB 编程产生模拟数据实现SMART 反演算法.由于模拟的是层析成像光谱仪所要获取的三维信息,因此整个空间维上是有灰度信息的,而在光谱维上,由于He II 30.4 nm 谱线具有97.8 mÅ的线宽(约占3 个像素),因此除了He II 30.4 nm 谱线所在的区域其他区域是没有灰度信息的.在模拟目标的数据中固定谱线的线宽同时加入大量的谱线偏移,获得原始图像的灰度信息见图10(a),其中横轴为以像素为单位的空间维x,纵轴为以像素为单位的光谱维λ.利用“SMART”算法迭代运行获得的重建图像见图10(b),从整体轮廓上看重建图像大致和原始图像吻合.由于仅仅利用3 个级次投影和1 个无穷级次的先验信息进行的三维数据立方体重建是一个病态的反演过程,所以重建过程存在明显的系统误差,这些误差在直观上的反映就是重建图像变得比原始图像模糊.
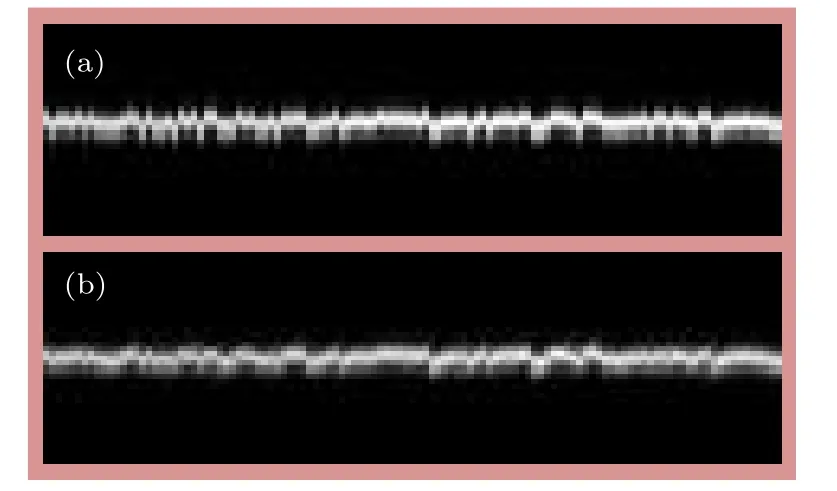
图10 初始图像和重建图像对比 (a) 初始图像;(b) 重建图像Fig.10.Comparison of the initial image and the reconstructed image:(a) Initial image;(b) reconstructed image.
太阳极紫外层析成像光谱仪所要反演的主要目标是谱线中心位置的偏移量大小,从而根据多普勒效应可以推导出对应空间区域的等离子体视向速度,进而判断太阳活动的对地有效性以及剧烈程度,因此谱线中心位置的测量误差直接关系到仪器光谱测量的精度和仪器的实用性.在图10 所示的模拟数据中,对每一个空间像素对应的光谱维(一列数据)进行高斯拟合,得到高斯峰值的位置即为谱线的中心位置.图11 展示了部分区域重建谱线中心和原始谱线中心位置的比较情况,可以看出重建图像的谱线中心位置大致和原始图像相吻合,但是存在一定的误差.图12 为谱线偏移的误差大小,重建结果越准确,图中所有的离散点越向直线y=x集中,即向重建得到的偏移量和原始偏移量相等的方向集中.

图11 谱线的中心位置Fig.11.Central position of line.
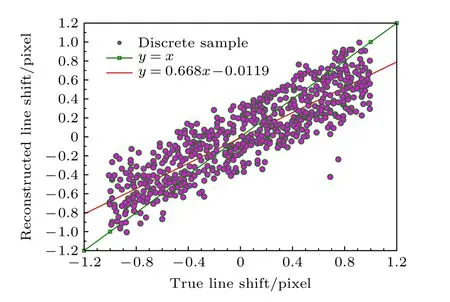
图12 谱线偏移误差Fig.12.Error of line shift.
为了得出实验结果的精度和验证量化重建效果的好坏,引入谱线中心的相关系数τ、谱线偏移的拟合直线斜率k和谱线偏移的均方根误差δRMS.如表3 所列,可知图11 中原始的谱线中心曲线和重建的谱线中心曲线相关系数τ为0.862,具有高相关性;重建的谱线偏移斜率k为0.668;谱线偏移的均方根误差δRMS为0.294.量化的评价结果表明:SMART 算法在谱线偏移的重建上具有约1/3 像素的系统误差.造成这一系统误差的最根本原因是用于光谱数据反演的投影级次太少,即光栅的衍射级次太少,这也是三级次层析成像光谱仪的不足之处,为了降低光谱数据反演的系统误差,可以采用更多的光栅衍射级次,比如采用5 个衍射级次(±1,0,±2)的新型层析成像结构.

表3 反演效果评价指标Table 3.Evaluation indicators for the reconstruction.
5 结论
本文设计的新型太阳极紫外层析成像光谱仪,采用三级次无狭缝的衍射成像方式,可实现对He II 30.4 nm 的大视场瞬时光谱成像.整个系统不需要任何元件的机械运动,通过单次快照便可以获得3 幅携带有谱线信息的二维太阳极紫外图像,不发生色散的0级次系统相当于一台成像仪,可以直接获得高分辨率空间信息;发生色散的+1 和–1级次图像携带有空间和光谱的混叠信息,利用有限投影角度下的层析成像光谱反演算法,可以从3 个级次的图像中提取高分辨率的光谱信息.尽管谱线偏移的反演具有1/3 像素的系统误差,但是对于这种新颖的光谱成像方式,依然具有很好的实用性.这样的仪器可面向卫星遥感的应用,实现对二维日面的持续性快照光谱成像,获得太阳活动前所未有的新信息.
猜你喜欢
物理实验(2022年6期)2022-07-27
天津大学学报(自然科学与工程技术版)(2022年5期)2022-03-09
保山学院学报(2021年5期)2021-11-14
天津诗人(2021年1期)2021-11-12
电脑报(2020年9期)2020-04-28
科技视界(2019年23期)2019-09-28
科学与财富(2019年24期)2019-08-06
电子制作(2019年24期)2019-02-23
科学大众(中学)(2016年11期)2016-12-29
湖南大学学报·自然科学版(2014年3期)2014-12-30
