基于车载原子重力仪的外场绝对重力快速测绘研究*
2022-08-12 14:28:30王凯楠徐晗周寅许云鹏宋微汤鸿志王巧薇朱栋翁堪兴王河林彭树萍王肖隆程冰李德钊乔中坤吴彬林强
物理学报 2022年15期
王凯楠 徐晗 周寅 许云鹏 宋微 汤鸿志 王巧薇 朱栋 翁堪兴 王河林 彭树萍 王肖隆 程冰 李德钊 乔中坤 吴彬 林强
(浙江工业大学理学院,浙江省量子精密测量重点实验室,杭州 310023)
地球重力场信息是大地测量学、地球物理学、地球动力学等学科所必需的重要基础信息,重力场测绘是获取地球重力场信息的有效手段.相比于卫星、海洋、航空重力场测绘,车载重力场测绘具有灵活性强、空间分辨率高、精度高等优点.基于相对重力仪和高精度绝对重力基准点可以实现陆域小范围重力场测绘,但相对重力仪存在零点漂移,不适用于长基线、大范围的陆域测绘.本文基于小型化原子重力仪搭建了一套车载绝对重力快速测绘系统,在郊区安静外场环境,由12 个测点约3 km 的测绘结果评估仪器的内符合精度为0.123 mGal (1 Gal=10–2 m/s2),外符合精度为0.112 mGal,并在闹市复杂外场环境下实现了单点调节时间小于2 min,有效测量时间5 min 的快速绝对重力测量,通过19 个测点跨区约24 km 的重力场快速测绘,评估仪器的内符合精度为0.162 mGal,外符合精度为0.169 mGal.最后将原子重力仪的外场重力场测绘数据与卫星重力模型计算的数据进行了比较,发现两者的自由空间重力异常数据的整体变化趋势相吻合.本文为外场绝对重力场快速测绘提供了一种新的方案.
1 引言
地球重力场信息是大地测量学、地球物理学、地质学、地球动力学等学科所必需的重要基础信息[1].重力场测绘是获取地球重力场信息的有效手段,卫星重力测绘覆盖区域大、范围广,但空间分辨率低、测绘精度不高;海空重力测绘能够适应海空复杂地形,空间分辨率高、测绘效率高,但系统复杂且成本较高.车载重力测绘具有灵活性强、系统简单、成本低、精度高的特点,可为陆域局部高精度基础地质调查提供支撑.目前重力场测绘大多为相对重力测量,由于相对重力仪存在零点漂移,需要定期的标定和校准,影响长周期测绘数据的质量.近年来,随着干涉型原子重力仪的快速发展,基于该类型仪器的重力场测绘开始出现;与相对重力测量不同,原子重力仪测量绝对重力值,不存在零点漂移,因此该测绘方式一经出现便受到广泛关注.
原子重力仪是近三十年来快速发展起来的一种新型重力测量传感器[2,3],它具有重复率高、灵敏度高、稳定性强等特点,目前原子重力仪的重复率、灵敏度[4,5]等性能已经超过了传统最好的绝对重力仪,有望成为下一代的高精度绝对重力仪.早期的原子重力仪装置十分复杂[6−8],体积重量功耗难以满足外场测绘的需求.近年来,随着真空、光学及电控系统技术成熟度的不断提高,小型化可移动的原子重力仪开始出现[9−19],并逐渐参与到重力比对[15,16,19−21]及外场绝对重力测量演示中[9,14,22,23].随着原子重力仪在工程化、小型化及环境适应性等方面性能的不断提升,基于原子重力仪的外场绝对重力测绘逐渐涌现[24−29].2018 年法国航空航天实验室基于小型化原子重力仪首次完成了海洋重力场测绘,绝对重力测量精度优于1 mGal (1 Gal=10–2m/s2)[26];随后,基于同一套装置他们完成了航空重力场测绘,精度在1.70—3.90 mGal[25].Müller课题组[24]基于原子重力仪和主动隔振平台搭建了一套车载原子绝对重力测量系统,实现了测线长度约7.6 km,海拔差约400 m,共6 个测点的绝对重力测绘,测绘精度达到40 µGal,单个测点调节时间15 min,有效测量时间数分钟.华中科技大学胡忠坤课题组[27]将原子重力仪真空系统放置在地上进行调平,实现了高度差达到70 m 的29 个测点的车载绝对重力测绘,单点调节时间5 min,有效测量时间25 min,测量精度优于1 mGal.本课题组团队[29]基于集成的车载绝对重力测量系统和被动隔振技术,在野外平坦路面、大倾角山体路面(海拔高度差12.77 m,倾角8.6°)分别实现3 个测点的车载绝对重力测绘,单点调节时间20 min,有效测量时间20 min,测量精度优于30 µGal.这些车载绝对重力测绘存在系统结构复杂、单点测量耗时长、调整优化困难、续航能力差、测绘效率低等问题,也难以适用于闹市大振动复杂环境.
本文在前期车载绝对重力测绘工作的基础上,集成了一套小型化的原子重力仪,改进了仪器的体积、重量、功耗及环境适应性.同时,结合双轴惯性稳定平台和主动振动补偿装置搭建了一套车载绝对重力快速测绘系统,并开展了外场测绘试验.首先,在浙江工业大学校园内评估了小型化原子重力仪的测量灵敏度和精度.其次,在杭州宝寿山安静环境以及长沙黄兴大道闹市大振动环境开展了绝对重力测绘试验,评估了原子重力仪在不同测试环境下的测量性能.最后,将快速测绘的重力数据与卫星重力模型计算的数据进行了对比,发现数据的整体变化趋势相吻合,且实测数据在一些点位对地质构造的反映更清晰.本文提出的车载绝对重力快速测绘方案能够提高测绘的效率,具有灵活性强、环境适应性强等特点,未来有望服务于陆域精细地质调查、地球物理研究、无依托阵地发射、惯导加表校准、外场绝对重力基线构建、垂向偏差测绘、重力匹配辅助导航等领域.
2 车载绝对重力快速测绘原理及试验装置
2.1 基本原理
车载绝对重力快速测绘系统的核心是一套小型化原子重力仪.原子重力仪的基本原理是冷原子物质波干涉,文献[3,8]已详细报道,在此只做简单介绍.单次冷原子下落测量重力的周期为500 ms,首先在前280 ms 内捕获约108个原子,经偏振梯度冷却后,原子团温度降至6 µK;利用微波选态将原子制备到对磁场不敏感的mf=0 能态上,再利用三束多普勒敏感的π/2-π-π/2 拉曼激光脉冲序列形成一个典型的马赫-曾德尔型原子干涉仪,其中拉曼π 脉冲的持续时间为10 µs,两个拉曼脉冲之间的时间间隔为55 ms;最后使用归一化探测方法获取原子团的荧光信号,得到原子在两个态上的跃迁概率PP0+C/2 cosφ,式中P0为原子干涉条纹的偏置量;C为原子干涉条纹的对比度;φ为原子干涉条纹的相位,φ(keff·g −α)T2+φvib,其中keff为拉曼光的有效波矢,α为拉曼光的扫频啁啾率,T为两束拉曼光脉冲之间的时间间隔,g为重力加速度,φvib是由拉曼反射镜振动引入的相移,可以借助主动振动补偿技术,还原原子干涉条纹,从而精确提取重力加速度信息.
2.2 系统装置
本文搭建的车载绝对重力快速测绘系统主要由原子重力仪、惯性稳定平台、振动主动补偿系统以及辅助单元组成,如图1 所示.
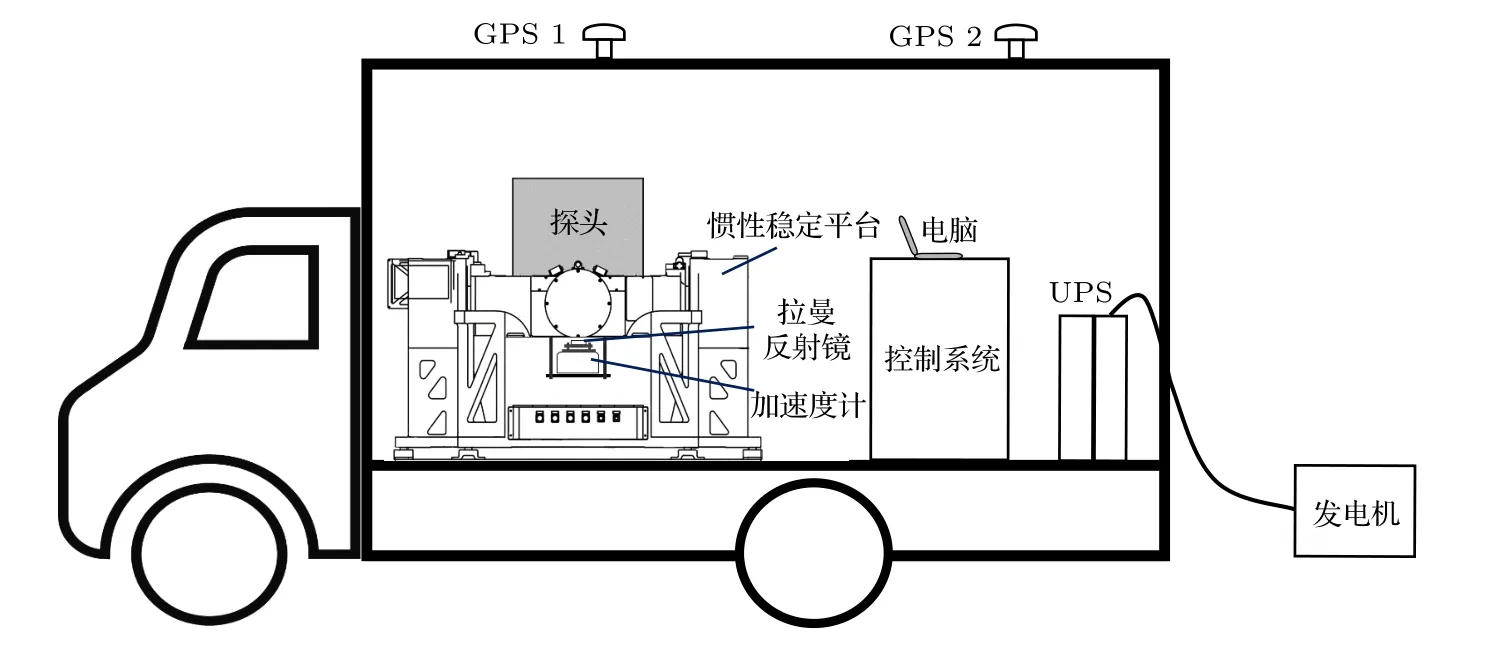
图1 车载绝对重力场快速测绘系统示意图Fig.1.Schematic diagram of the vehicle-mounted system for rapid surveying of the absolute gravity field.
原子重力仪是该测绘系统的核心,与以往装置不同[23,29],本文实验搭建了一套全新的小型化原子重力仪装置.对真空系统进行加固,加装主动振动补偿系统,并且优化了体积和质量,优化后真空系统直径0.48 m,高0.56 m,质量小于55 kg.激光系统采用两个1560 nm 的光纤激光器作为光源,其中参考激光器经放大倍频后输出1 mW 的780 nm激光,并基于调制转移光谱锁频系统进行激光器的频率锁定(锁定在Rb85|F3〉→|F′4〉共振跃迁);主激光器通过与参考激光器拍频进行锁定,并通过跳频实现主激光器输出频率的快速切换.再泵浦光和拉曼光是通过倍频前的光纤式相位调制器来实现,通过改变射频频率及功率来实现切换.
惯性稳定平台和振动主动补偿系统是实现快速测绘的重要组成部分.文献[29]中提到,每到一个测点,需要20 min 来调节位姿平台和被动隔振平台以确保仪器处于最佳的工作状态.惯性稳定平台可以实现地理坐标系的实时跟踪和定位,使原子重力仪真空系统始终保持在垂线方向,姿态控制精度为 20′′,仪器到达测点后无需再调整倾斜.振动主动补偿系统由高精度加速度计、高速采集卡以及振动补偿算法组成.将高精度加速度计与拉曼反射镜刚性连接,以2 kHz 的采样率采集拉曼反射镜的振动加速度信号,结合原子干涉仪的灵敏度函数得到,其中H(t) 为原子干涉仪的灵敏度函数,avib(t) 为拉曼反射镜的实时振动加速度信号.在车载环境下,φvib是一种远超其他干涉仪的随机相位噪声,所以会导致原子干涉条纹难以分辨,借助主动振动补偿技术,基于算法进行后补偿的方式,在原子干涉仪测得的相位中减去振动相移,可以还原出原子干涉条纹,并精确提取重力加速度的信息,故无需再借助被动隔振平台隔离高频振动噪声.综上所述,本文搭建的车载快速绝对重力测绘系统与文献[29]中提到的基于被动隔振平台和位姿调整平台搭建的系统相比,调整和稳定时间从原来的20 min 缩减为2 min.
辅助单元包括差分GPS 测高系统、供电系统、车载空调温控系统.GPS 测高系统记录测点的经纬度和海拔高度,基于测量的经纬度可得到粗略的绝对重力初值,基于测量的海拔数据可进行高度归算;供电系统主要为了防止外部突然供电中断,导致系统出现故障;车载空调温控系统主要用于维持仪器运输以及运行过程中车厢内的温度,控温精度为±2 ℃.
2.3 车载绝对重力测绘流程
车载绝对重力测绘系统搭建完成或远距离断电运输后需要先上电预热,预热时间约30 min,主要是惯性稳定平台预热耗时约30 min 以将原子重力仪真空系统调整至严格的垂线方向.在预热惯性稳定平台期间,锁定激光器频率、检查仪器电控部分的工作状态、检查并优化激光光路系统,确认原子重力仪正常工作.随后将车开到预定测点,关闭汽车发动机,开始测量.测量时,需要在第一个测点通过改变T的方法确定绝对重力初值,预计耗时7 min,其他测点不必重复该操作.在各测点间运输过程中空调及仪器采用汽车的取力发电机进行供电,以维持其工作状态.到达另外一个测点后,检查参数,若无异常情况,关闭发动机,即可在2 min内开始测量;若存在异常情况,需要排查优化,每个测点的有效测量时间设定为5 min.综上,若仪器处于冷启动状态,调试及预热时间可控制在1 h以内,若仪器在运输过程中已经完成预热工作,到达指定测点后,第一个测点预计耗时14 min,测线上其余测点预计耗时7 min.
3 车载绝对重力快速测量结果
3.1 车载快速绝对重力测绘系统环境适应性评估
考虑车载测绘环境比较恶劣,在外场测试前,对系统的环境适应性进行了评估,主要包括温度适应性及振动环境适应性.考虑在外场环境下存在无法给空调及时供电的情况,因此开展了温度适应性测试试验.室外环境,关闭空调,车厢未作遮阳处理,在车厢内外、原子重力仪各组成单元内设置温度监测点;同时记录温度及绝对重力值数据,发现当外界温度较高(32 ℃左右)时,各监测点温度在1 h 内从28 ℃上升至35 ℃;打开空调,2 h 内温度恢复至28 ℃,在此期间单次下落重力值的变化峰峰值不超过0.10 mGal,没有呈现与温度相关的变化,因此基本认为该系统的温度适应性较好.
在前期开展的车载试验中[29],为了减轻车辆轮胎起伏引入的随机振动,借助专用的支撑架将测试车辆架空,直接固定在地面上,但该操作不仅会延长测试时间,调整安装也有一定难度.为了更好地模拟外场测试环境,本次外场测试中均不再将车辆架起.
通常情况下外场的振动环境是复杂的,利用高精度加速度计可测得不同环境下的振动噪声功率谱密度(power spectral density,PSD).在低振动环境(杭州宝寿山)以及高振动环境(长沙黄兴大道)下分别测得的振动噪声功率谱密度如图2 所示,图中黑线和红线分别为高振动和低振动环境下的噪声功率谱密度.由图2 可见,在原子重力仪较为敏感的0.1—10 Hz 频段,高振动环境的振动功率谱密度均远大于低振动环境,且在2 Hz 附近存在一个超过–55 dBc/Hz 的峰.为了更直观体现两种振动环境对原子重力仪测量性能的影响,结合原子干涉仪的传递函数,计算原子单次下落时振动对干涉相位的影响,在高振动、低振动环境下振动对原子干涉条纹相位的贡献分别为24.14 rad 和0.84 rad.
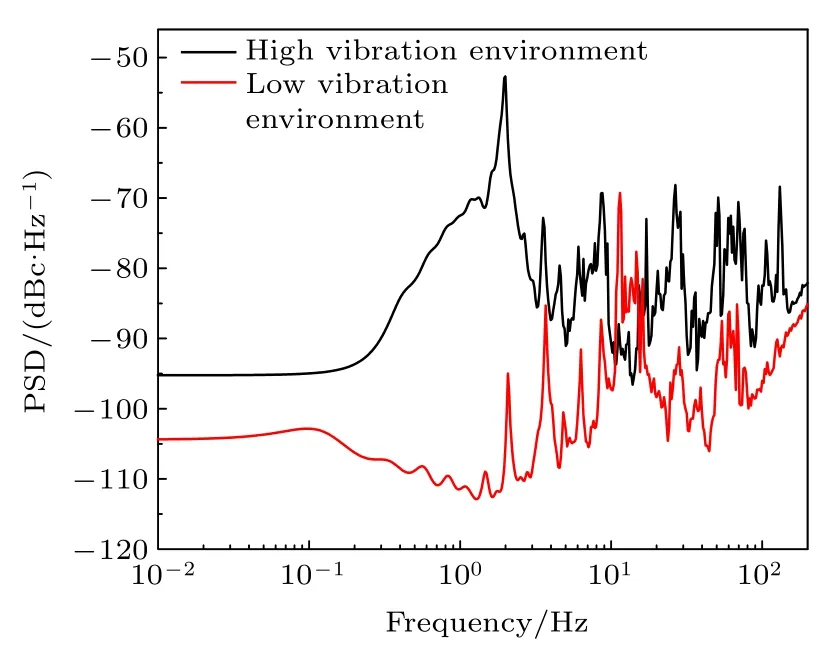
图2 外场环境下的振动噪声功率谱密度Fig.2.Power spectral density of the vibration noise in the field.
3.2 低振动噪声环境下的车载绝对重力测绘结果
3.2.1 外场车载测绘前的校准评估
在仪器开展外场测绘前,首先在浙江工业大学校园内对车载绝对重力快速测绘系统进行性能评估测试.评估期间车厢持续供电,空调处于常开状态,车轮落地,发动机关闭,车上无人员活动.连续测量15 h 得到图3 所示的重力值数据(已修正潮汐理论数据).图中黑色点为5 min 分组平均后的结果,由图3 可见,重力值变化的峰峰值在0.40 mGal 以内,测量结果不存在漂移.
计算图3 数据的Allan 偏差以评估测绘系统的灵敏度.从图4 可以看出,该系统的灵敏度为1.0 mGal/Hz1/2,积分时间5 min 仪器的分辨率能优于0.07 mGal.
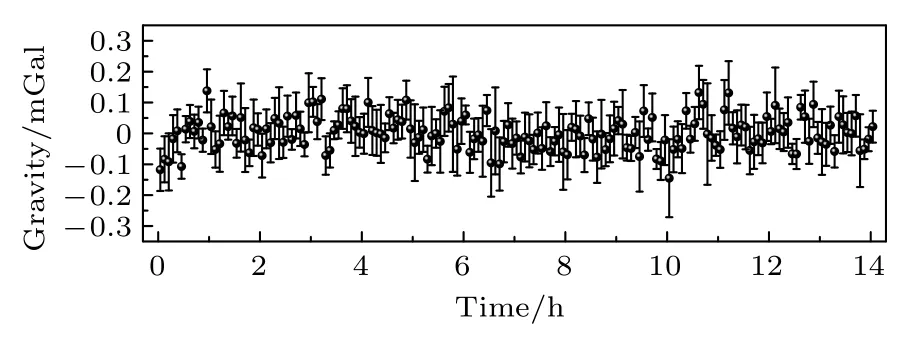
图3 车载静态环境下的长扫重力测量结果(单点5 min平均)Fig.3.Long-term measured results of gravity on a static truck (each point takes average of 5 minutes).
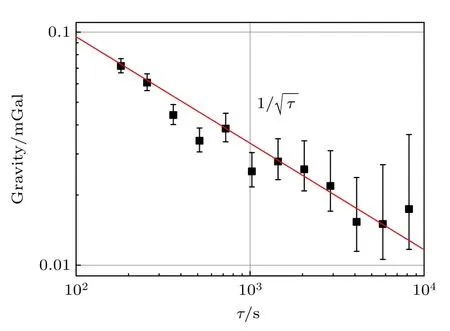
图4 车载静态情况下的重力测量灵敏度评估Fig.4.Evaluation of sensitivity with the measured gravity data when the truck is stationary.
为了评估仪器在车载环境下的测量精度,对各项系统效应进行评估,并对重力测量结果进行了修正,主要包括自引力效应、激光频率(由于锁频方式导致了此项波长修正)、拉曼光对光、双光子频移、科里奥利力效应、波前畸变、射频相移、边带效应、气压、极地运动等,总系统效应修正量为–0.350 mGal,合成标准不确定度为0.117 mGal,其中A 类不确定度为0.054 mGal,B 类不确定度为0.104 mGal,具体的B 类不确定度见表1.同时,为了验证绝对重力值,基于CG-5 型相对重力仪从浙江工业大学基准点(经FG-5 型绝对重力仪标定,不确定度为0.0035 mGal)引点至调试点,经比较确认差值小于0.100 mGal.
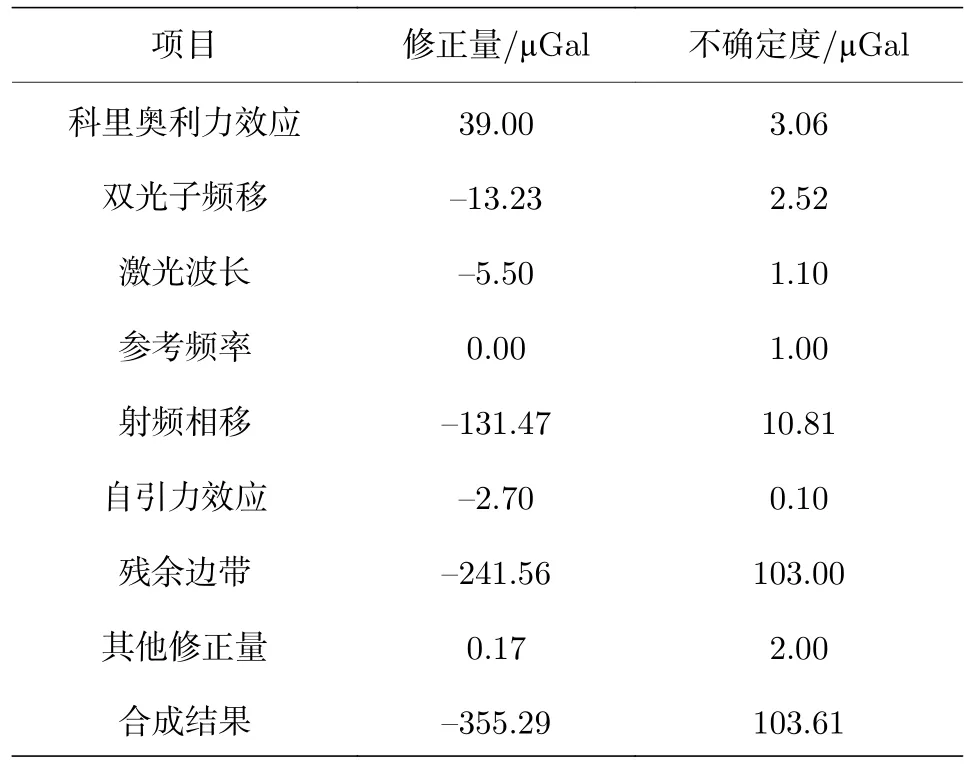
表1 车载快速绝对重力测量系统B 类不确定度表Table 1.Class B uncertainty table for vehicle-mounted rapid absolute gravimetry system.
3.2.2 低振动噪声环境下的车载绝对重力测绘结果
杭州郊区宝寿山有着低振动的噪声环境,选择长约3 km,最大高差为36.378 m 的测线,并在测线上选取了12 个测点开展了外场绝对重力测绘试验,测线及测点分布如图5 所示.测线附近为居民区,无施工和大型车辆,振动环境较好.考虑测试时间为3 月份,外界温度不高,且能就近找到充电点,故此次测试没有加装发电机;当仪器连续工作2.5 h 后,需要到充电点进行充电.

图5 杭州市宝寿山测线以及测点分布图,蓝色实线为测线,红点表示各测点分布Fig.5.Measurement route and the distribution of measured points on Baoshou Mountain in the city of Hangzhou.The blue curve depicts the measurement route and the red points are the measurement locations.
为了评估仪器的重复测绘性能,在宝寿山开展了两次测绘工作,每个测点调节时间在2 min 以内,有效测量时间设定为5 min,测量得到的原始重力数据修正仪器的系统效应后得到每个测点的绝对重力值(修正量根据浙江工业大学校园内试验校准结果进行确定),测绘结果如图6 所示,其中黑点和红点分别表示原子重力仪两次测绘结果.由图6 可见,12 个测点的重力值变化超过8.00 mGal,主要由海拔高度变化引起.同时计算两次测绘结果的残差,由残差计算原子重力仪本次外场测试的内符合精度为0.123 mGal.
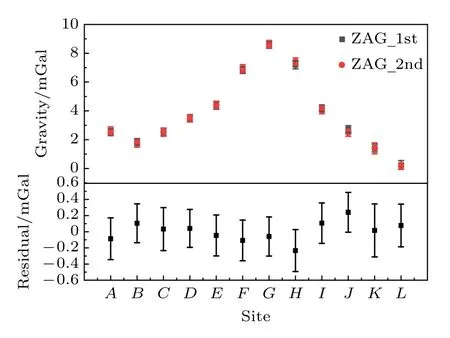
图6 杭州宝寿山原子重力仪两次测绘的结果及其残差Fig.6.Surveyed results of absolute gravity of two repeated measured line and the corresponding residuals obtained by the atomic gravimeter on Baoshou Mountain in the city of Hangzhou.
为了进一步验证绝对重力值,基于CG-5 型相对重力仪从浙江工业大学的基准点进行引点测绘工作.相对重力仪CG-5 单点的有效测量时间为10 min,闭环测量2 次,不确定度为0.012 mGal.测绘结果如图7 所示,其中黑点为原子重力仪两次测绘结果的平均值,红点为相对重力仪的测绘结果,计算两种仪器测量结果的残差评估本次外场测试仪器的外符合精度为0.112 mGal.
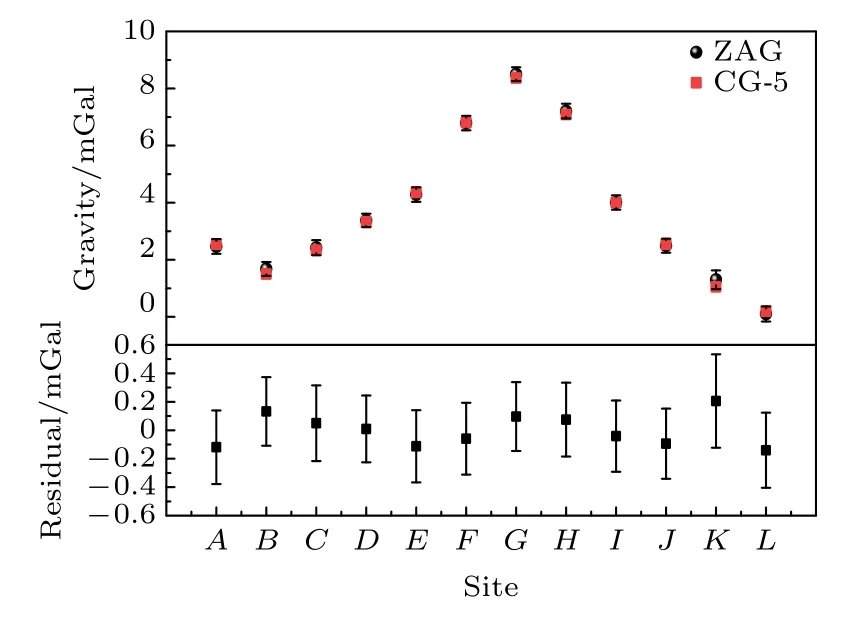
图7 在杭州宝寿山由原子重力仪与CG-5 相对重力仪测绘的数据及两者的残差数据.图中黑点为原子重力仪两次测绘结果的平均值,红点为相对重力仪两次测绘结果的平均值Fig.7.Gravity data surveyed by atomic gravimeter and relative gravimeter of CG-5 on Baoshou Mountain in Hangzhou city and the residuals data between them.The black dots and red dots are the average values of measured gravity data of two repeated lines with atomic gravimeter and relative gravimeter CG-5,respectively.
3.3 高振动噪声环境下的车载绝对重力测量结果
选择长沙闹市区黄兴大道作为高振动噪声环境以开展测绘试验,确定一条长约24 km 的测线,共选取了19 个测点,测点最大高程差为34 m,测线及测点分布如图8 所示.测点均设置在马路旁,多有大型车辆经过,且较多测点分布在闹市区;相较于宝寿山测区,该测区的振动噪声更大,对绝对重力测量的影响更大.该测试是在6 月份开展,室外最高温度超过40 ℃;在阳光直射情况下,关闭空调车厢温度会急剧上升,使得测试无法开展;同时考虑测点无充电点,故本次测量加装发电机,确保仪器在每个测点都能正常连续工作,缩短充电耗费的时间,提高测绘效率.

图8 长沙黄兴大道测线及测点分布图,其中蓝色实线是规划的测线,红色标记点是各测点位置Fig.8.Measurement route and the distribution of measured points on Huangxing Avenue of Changsha city.The blue curve depicts the measurement route and the red marked points are the measurement locations.
在该环境下,评估了车载原子绝对重力测绘系统的重复测绘性能并确认了各测点的绝对重力值.重复测绘性能的评估方法与宝寿山试验基本一致,测线重复测绘两次,每个测点有效测量时间为5 min,结果如图9 所示,红点和黑点分别为原子重力仪两次测绘结果,第二次测量有3 个测点由于仪器故障没有有效数据.由图9 可知,19 个测点重力值变化超过了15.00 mGal,主要受纬度、高度及地形的影响.计算两次测量结果的残差评估仪器在高振动环境下内符合精度为0.162 mGal.
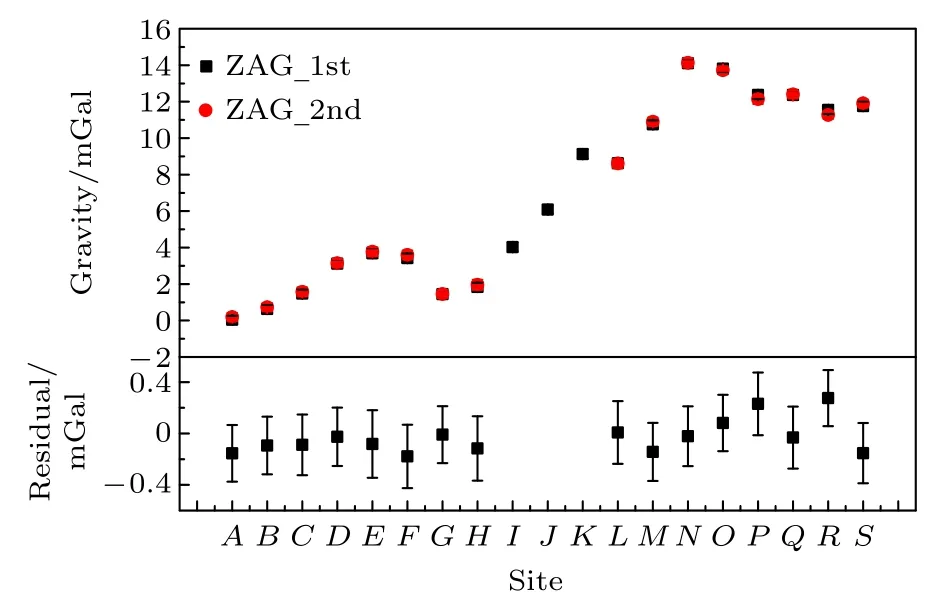
图9 高振动噪声环境下原子重力仪在同一测线两次重力测绘的数据及其残差数据Fig.9.Surveyed gravity data of the same line for twice measurements with atomic gravimeter in the environment of high vibration noise and the residuals data.
为了进一步确认每个测点的绝对重力值,基于长沙地震局的高等级绝对重力基准点(不确定度为0.005 mGal),利用相对重力仪CG-5 进行了引点测绘.相对重力仪CG-5 单点的有效测量时间为10 min,闭环测量3 次,受外界环境(主要是振动)影响,不确定度为0.073 mGal.每个测点的重力梯度值也由相对重力仪测得,将重力值修正到同一高度,得到三次闭环的测量结果的平均值如图10 红圆点所示,将该结果与原子重力仪两次测量结果平均值(如图10 黑点所示)进行比较得到残差,评估仪器在高振动环境下外符合精度为0.169 mGal.由上述两次外场测试结果可见,在高振动环境下仪器的测量性能较差,主要受振动补偿效果以及仪器本身稳定性影响.

图10 高振动噪声环境下由原子重力仪与相对重力仪CG-5 测绘的数据及两者的残差数据,图中黑点为原子重力仪两次测绘结果的平均值,红点为相对重力仪三次测绘结果的平均值Fig.10.Gravity data surveyed by atomic gravimeter and relative gravimeter of CG-5 in the environment of high vibration noise and the residuals data between them.The black dots and red dots are the average values of measured gravity data of two repeated lines with atomic gravimeter and three repeated lines with relative gravimeter CG-5,respectively.
3.4 重力测绘数据对地质解释的作用
基于3.3 节的绝对重力测绘结果,进行一定的地质解释.每个测点的绝对重力测量值受高度、地形、正常场(纬度)等因素影响.首先基于每个测点的重力梯度值修正了高度引起的重力值变化;其次考虑测区位于长沙市区,地势平坦,受地形影响较小;而测区跨度近30 km,受纬度影响较大,为了更好地反映地下异常体引起的重力异常分布特征,需要对观测值进行纬度改正(正常场改正).
将测点重力值归算到同一纬度的大地水准面后的重力异常,改正后得到测点自由空间重力异常,计算公式如下:
其中,Gf为自由空间重力异常;Ga为测点绝对重力异常;Gl978031.846(1+0.005278895sin2L+0.000023462sin4L)为纬度改正,L为测点纬度,由车载差分GPS 测量得到;Gv为测点的重力梯度,每个测点的重力梯度由相对重力仪CG-5 测得;Hs为测点的高程,每个测点的高程如图11 所示.
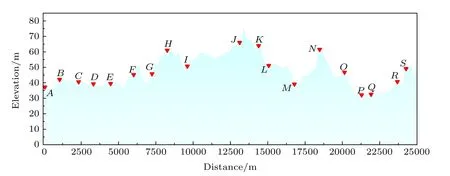
图11 长沙黄兴大道测区高程剖面图(红色倒三角为测点)Fig.11.Elevation profile of measurement locations on Huangxing Avenue of Changsha city (the red inverted triangles are the measured points).
为了研究该区域重力异常分布情况,本文通过EGM2008 全球超高阶地球重力场模型拟合获取测点所在工区自由空间重力异常分布(简称重力异常)如图12 所示.自由空间重力异常很好地反映了实际地球的形状和质量分布与大地椭球体的偏差,工区重力异常整体呈现负异常,表明测区的地壳深部存在相对质量亏损.工区重力变化平缓,工区东北负异常较大,达到–40 mGal 左右,西南负异常较小,为–14 mGal 左右,异常整体由西南向东北缓慢增大,另外工区西北部分布局部较小负异常.

图12 由EGM2008 模型拟合获取重力异常分布图Fig.12.Distribution map of the gravity anomaly obtained by fitting of the EGM2008 model.
将实测重力异常和模型重力异常进行比较,结果见图13,其中红色点为模型重力异常;黑色点为实测重力异常,通过对比两者重力异常可得两组数据整体形态变化相吻合,均表现为先平稳上升后下降的趋势,两组重力异常数据差异最大为5.11 mGal,最小仅为–0.02 mGal,平均值为1.16 mGal,均方误差为2.16 mGal.其中,前14 个测点分布在市区内,地形平坦,两组重力异常一致性较好,后5 个测点分布在山区,两组重力异常产生了较大分歧,其原因是EGM2008 模型的阶次完全至2159,模型的空间分辨率约为5′(9 km),分辨率较低,特别是在缺乏地表重力数据支持的地形复杂地区,系统误差较大.工区异常图利用最小曲率插值网格出0.2′× 0.2′的采样点,测点对应的模型重力异常值是指0.2′× 0.2′网格内部的重力异常平均值,很难反映测点真实重力值,而实测重力异常则是指测点处真实重力值,更能清晰、真实的反映测点的地质构造情况,同时也可以利用该实测数据对模型结果加以修正,进而获得较高精度的模拟重力场.因此在开展区域高精度地质勘探工作时建议使用高精度重力仪的实测数据进行地质构造解释.
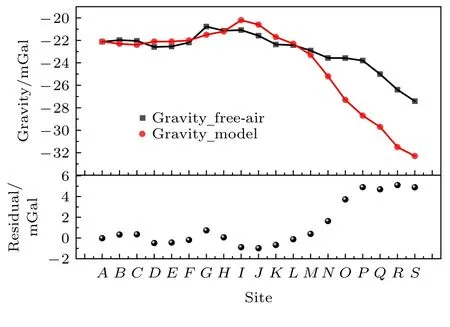
图13 实测与模型计算的自由空间重力异常数据及其残差,图中红色点为由卫星重力模型拟合获取的测点自由空间重力异常,黑色点为原子重力仪测量值改正后的测点自由空间重力异常Fig.13.Free-air gravity anomalies obtained by the measured data with atomic gravimeter and the fitting of gravity model and the residual date between them.The black and red dots are the results acquired by atomic gravimeter and the theoretical model,respectively.
4 小 结
基于新研制的小型化原子重力仪,结合惯性稳定平台、辅助测量设备等搭建了一套绝对重力快速测绘系统,在浙江工业大学校园内评估了其外场测量性能,试验发现在连续测量的15 h 内重力值不存在漂移;基于相对重力仪从基准点引点的方式进一步确认测点的绝对重力值,两者测量差值小于0.1 mGal;同时,利用Allan 偏差数据评估了该系统的重力测量灵敏度,约为1.0 mGal/Hz1/2.基于该系统开展了外场绝对重力快速测绘试验.本文分别在低振动环境的杭州宝寿山和高振动环境的长沙黄兴大道分别选取了一定数量的测点,开展了快速测绘试验.在低振动环境下,有效测量时间5 min内,仪器的内符合精度为0.123 mGal,外符合精度为0.112 mGal,在高振动环境下,有效测量时间5 min 内,仪器的内符合精度为0.162 mGal,外符合精度为0.169 mGal.最后,基于长沙实测数据进行了一定的地质体解释,发现实测数据的自由空间重力异常与卫星重力模型拟合获取的测点自由空间重力异常的数据整体变化趋势相吻合.本文试验结果不仅为外场绝对重力场快速测绘提供了新的方案,也证实了高精度重力仪在地质构造解释中存在应用前景.
猜你喜欢
计测技术(2021年2期)2021-07-22 09:16:56
中国交通信息化(2021年1期)2021-06-11 01:23:46
地震研究(2021年1期)2021-04-13 01:04:56
铁道通信信号(2020年8期)2020-02-06 09:13:18
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
中国交通信息化(2017年1期)2017-06-08 06:05:04
中国交通信息化(2017年4期)2017-06-06 07:21:48
中国公共安全(2017年11期)2017-02-06 05:28:09
中国交通信息化(2017年10期)2017-01-14 17:06:07
电源技术(2015年2期)2015-08-22 11:28:14