
湖冰厚度遥感反演进展与展望
2022-08-11 05:45李兴东龙笛黄琦赵凡玉刘廷玺
遥感学报 2022年7期
李兴东,龙笛,黄琦,赵凡玉,刘廷玺
1.清华大学 水利水电工程系 水沙科学与水利水电工程国家重点实验室,北京 100084;2.内蒙古农业大学 水利与土木建筑工程学院 内蒙古自治区水资源保护与利用重点实验室,呼和浩特 010018;3.黄河流域内蒙段水资源与水环境综合治理协同创新中心,呼和浩特 010018
1 引 言
湖冰是冰冻圈领域的重要研究对象,它通过影响湖泊与大气之间的物质能量交换实现对局部气候和湖泊生态系统的调节(Wik 等,2016;Wang 等,2018;Engram等,2020;Yang等,2020),同时也为冰上生产生活提供了便利(Orru等,2014;Hori等,2018)。随着气候变暖,全球范围内湖冰正在逐步消退,将对湖泊生态系统和依赖湖冰的人类活动造成重大影响。对于湖泊生态系统而言,湖冰和冰上积雪的存在可以增大反照率,降低湖泊对太阳辐射的吸收,并影响湖泊的初级生产力。湖冰的消退意味着水体将吸收更多的太阳辐射,湖泊温度进一步上升,形成一定的正反馈。随着冰冻期的缩短和湖泊温度的升高,湖库的水面蒸发也将增大,影响湖泊的水量平衡。湖水的分层会随着温度上升而趋于稳定,从而造成湖底的缺氧化(Woolway 等,2020)。综上,湖冰过程直接或间接影响了湖泊的溶解氧、初级生产力、湖水温度、湖泊水量等与湖泊生物群落息息相关的变量,进而影响湖泊温室气体的产生和排放过程,例如湖泊的甲烷排放量将随湖冰覆盖减小而显著增加(Wik 等,2016)。对于人类社会而言,湖冰是寒冷地区居民生产生活所需的重要资源,例如加拿大北方地区主要依赖冰上道路实现冬季物资的运输(Hori 等,2018)。湖冰同时也产生了一些安全隐患,例如造成冬季溺亡事故(Sharma 等,2020),湖冰对水工建筑物的侵蚀,以及对湖中或者岸边仪器设备的损毁(Song等,2015)。
由世界气象组织WMO等联合国多个机构主导的全球气候观测系统GCOS(Global Climate Observing System)选取了两个变量作为湖冰领域的关键气候变量ECVs(Essential Climate Variables),分别是湖冰覆盖面积和湖冰厚度(Murfitt 和Duguay,2021)。湖冰覆盖面积可以通过各类卫星遥感影像进行监测,相关研究较为深入(魏秋方和叶庆华,2010;Kropáček等,2013;Sharma等,2019;Cai等,2019),技术较为成熟。而湖冰厚度信息无法从传统的光学遥感影像上获取,现阶段研究主要借助微波和热红外遥感信息,但多数方法处于发展初期。实测冰厚数据的稀缺导致难以验证反演算法,因此湖冰厚度遥感反演领域目前还存在较多空白,有待深入探索。另一方面,掌握湖冰厚度可以保证冰上活动的安全性,因此借助遥感方法高效地实现大范围湖冰厚度监测不仅在水文、气候研究中具有重要科学意义,对社会经济发展也具有重要实践价值。
近年湖冰相关研究已成为冰冻圈研究领域的热点之一。Sharma等(2019)基于513个湖泊的实测湖冰物候资料,利用气温、高程、水深、湖泊形状等信息构建了分类算法,将湖泊分为每年冻结、间歇性冻结、不冻结等类型,并预测未来气候变化将导致大量湖泊由每年冻结转化为间歇性冻结或不冻结。后续研究认为按照当前温室气体排放强度,到21 世纪末将有约6000 个湖泊永久性失去湖冰覆盖(Sharma 等,2021)。在湖冰厚度方面,Brown 和Duguay(2011)基于湖冰模型CLIMo模拟了北美地区湖冰厚度在1961年—2100年的演变,模拟在网格尺度开展,假定了不同的湖泊深度和积雪覆盖情况,结果显示至2070年,在不考虑积雪情况下平均最大冰厚将减小10—60 cm;在考虑积雪影响下平均最大冰厚将减小5—50 cm。Grant 等(2021)基于多个湖冰模型网格尺度的模拟结果,认为在RCP8.5 情景下,本世纪末全球范围内湖冰厚度将减小约17 cm。Li 等(2022)基于遥感湖冰模型,对北半球一千余个50 km2以上的湖泊冰厚进行模拟预测,得出现阶段全球湖泊平均最大冰厚约为63 cm(冰厚空间分布如图1 所示),在RCP8.5情景下,21世纪末平均最大冰厚可能减小约35 cm。Li 等(2022)和Grant 等(2021)的研究中均与ERA5-Land 提供的湖冰厚度数据进行了对比,ERA5-Land 湖冰厚度数据基于Flake 模型模拟得到(Kirillin 等,2011),Li 等(2022)通过对比实测资料认为ERA5-Land 提供的湖冰厚度在部分有实测资料的湖泊存在明显高估。

图1 2003年—2018年北半球平均最大湖冰厚度空间分布图(Li等,2022)Fig.1 Annual maximum lake ice thickness of the Northern Hemisphere from 2003—2018(Li et al.,2022)
从上述研究结果可以发现,当前湖冰厚度模拟和预测的差异还较大,亟待更高效精确的遥感冰厚观测对模型进行约束和优化。遥感反演湖冰厚度的方法根据其使用的传感器可以分为3类,即被动微波遥感、主动微波遥感和热红外遥感。其中,被动微波遥感方法的主要观测变量是亮度温度(以下简称亮温),主动微波遥感又可以进一步分为基于SAR 影像的方法和基于雷达测高的方法两类。热红外遥感则主要利用湖冰表面温度信息,并结合相应的模型对湖冰厚度进行估算。Kang 等(2014)基于被动微波传感器AMSR-E 对加拿大两个湖泊(Great Slave Lake 和Great Bear Lake)进行冰厚反演,论证了被动微波监测冰厚的可行性;基于SAR 影像后向散射系数可以将湖冰区分为浮冰或接地冰,再结合湖泊水下地形信息估算冰厚(Duguay 等,2002),对于有实测冰厚的湖泊,也可以直接构建后向散射系数与冰厚之间的回归关系(Murfitt 等,2018);基于测高雷达的湖冰厚度监测包括利用雷达回波波形(Beckers 等,2017)和测高雷达后向散射系数(Zakharova 等,2021),可构建近30年的冰厚观测序列(Li等,2022);基于热红外信息的冰厚反演最初用于海冰(Su 和Wang,2012;Mäkynen 等,2013),近年来逐渐扩展到湖冰厚度监测(Pour 等,2017;Li 等,2022)。
本文围绕上述遥感湖冰厚度反演方法,总结国内外研究的最新进展,梳理可用于湖冰厚度反演的遥感信息源,整理基于不同遥感信息的冰厚反演原理及应用实例,介绍各种反演方法的效果及优缺点,以及冰厚反演的验证方法和信息源,分析现阶段湖冰厚度研究面临的挑战与可能的发展方向。
2 湖泊冰厚的卫星遥感信息源
2.1 被动微波遥感数据
可以用于湖冰监测的被动微波传感器主要是各种微波辐射计,例如SMMR (Scanning Multichannel Microwave Radiometer),SSM/I(Special Sensor Microwave/Imagery),AMSR-E (Advanced Microwave Scanning Radiometer-Earth Observing System)。SMMR 是搭载于美国气象卫星Nimbus 7上的传感器,可观测5 个微波波段(6.6,10.7,18.0,21.0,以及37.0 GHz)。SSM/I 是搭载于美国国防气象卫星系列上的传感器,可观测4个微波波段(19.35,22.2,37.0,以及85.5 GHz)。SMMR和SSM/I的时间分辨率均为日时间尺度,空间分辨率均为25 km。SMMR 和SSM/I 的数据可以覆盖1978年至今,常被用于海冰物候、海冰厚度和湖冰物候方面的研究(Aulicino 等,2014;Ke 等,2013;Cai 等,2017;柯长青 等,2022),但在湖冰厚度领域的应用较少。AMSR-E 是搭载在美国国家航空航天局NASA 发射的Aqua 卫星上的传感器,它可以观测6 个微波波段(6.925,10.65,18.7,23.8,36.5,以及89.0 GHz)的亮温,常用于海冰、积雪以及湖冰物候研究(Wang 等,2018;Han 等,2019,2021;吴艳红 等,2022),已经被应用于湖冰厚度反演(Kang 等,2010)。与湖冰厚度相关性最高的波段是18.7 GHz,其空间分辨率约为28 km,时间分辨率为日时间尺度。AMSR2 可视为AMSR-E 的后继任务,搭载于GCOM-W1卫星上,和AMSR-E具有相似的波段设置,空间分辨率有所提高(例如18.7 GHz波段提升到了14 km×22 km),AMSR-E 数据覆盖2002年—2011年,而AMSR2于2012年投入使用,至今仍在运行。
2.2 主动微波遥感数据
主动微波遥感数据可以分为两类,一类是合成孔径雷达(SAR)影像,另一类是雷达测高数据。湖冰领域常用雷达波段包括L波段(1.2 GHz),C波段(5.4 GHz),X 波段(13.4 GHz)以及Ku 波段(13.4 GHz)等。常用的SAR 影像数据源包括欧空局ESA 发射的ERS-1,ERS-2,Envisat,Sentinel-1,加拿大发射的RADARSAT-1,RADARSAT-2和RADARSAT Constellation,德国发射的TerraSAR-X等。上述卫星除了TerraSAR-X 在X 波段工作外,其余均在C波段工作,影像分辨率从几米到几十米不等,远高于被动微波影像数据。在时间分辨率方面,除RADARSAT Constellation 有较高的时间分辨率(4 d),其余卫星时间分辨率相对较低(10—35 d)。SAR 影像数据的时间跨度较长,最早的ERS-1 卫星于1991年发射,在历史湖泊冰厚反演方面存在潜力。
测高卫星最初主要用于海平面和冰盖监测,后逐渐发展到内陆水体。目前被用于湖泊冰厚反演的测高卫星数据主要有CryoSat-2和Jason系列卫星。CryoSat-2 由ESA 研制并于2010年发射,使用了SAR 技术,可以视为波束有限雷达高度计(beam-limited radar altimeter),而Jason 系列卫星为NASA 和法国国家空间研究中心CNES 联合研制,属于传统的脉冲有限雷达高度计(pulselimited radar altimeter),技术基础在20世纪90年代就已成熟。相比于Jason 系列卫星,CryoSat-2 的波形具有更高的距离分辨率,有利于探测较小的冰厚,但时间分辨率相对较低(完整重访期1年,子周期约1 个月)。Jason-1/2/3 和TOPEX/Poseidon(T/P)系列卫星拥有测高卫星中最高的时间分辨率(约10 d),时间跨度最长(1992年至今),数据一致性良好,故在历史湖冰监测方面具有较大潜力,已有相关研究尝试利用其后向散射系数和回波波形进行冰厚反演(Zakharova 等,2021;Li等,2022)。
2.3 热红外遥感数据
目前常用于冰厚监测的热红外遥感信息是MODIS 的地表温度数据LST (Land Surface Temperature)。MODIS LST 主要基于MODIS 的31(11.03 µm) 和32(12.02 µm) 两个波段计算得到。MODIS LST 理论上每天有4次观测,空间分辨率可达到1 km,是研究湖冰的理想数据源。但由于云遮挡,MODIS LST 数据存在大量缺失,往往需要进行数据重建才能应用于相关研究,或者使用时间分辨率较低的产品(如MOD11A2 和MYD11A2,8 d 尺度)以保证有充足的有效像元(Chen等,2017;Bai等,2019;Long等,2020)。
3 湖泊冰厚遥感反演原理与应用
3.1 基于被动微波的湖泊冰厚反演
物体的亮温是在特定频率或波长下,黑体与该物体辐射强度相等时黑体的温度。在相同的温度与波长下,实际物体的热辐射总比黑体辐射小(发射率小于等于1)。而在相同的波长和热辐射条件下,黑体的温度总是低于或等于物体的实际温度(亮温小于等于实际温度),且发射率越小,亮温相比于实际温度越小。被动微波测量湖冰厚度的基本原理是水体和湖冰在微波波段发射率的差异。以加拿大大奴湖为例,冻结期和非冻结期的亮温变化过程如图2所示。水体在微波波段的发射率较低(0.4—0.5)(Hewison 和English,1999),而冰在微波波段的发射率较高(约0.9),因此,0 ℃的开阔水面亮温较低而结冰后亮温较高(尽管水的实际温度高于冰的实际温度)。根据AMSR-E亮温数据分析,湖泊从开始结冰到表面完全被冰覆盖,亮温会突然升高几十K,且亮温突变的现象在垂直极化方式和高频波段上更为显著(Kang等,2010)。在冰厚逐渐增加的过程中,亮温也会缓慢升高,因为冰厚的增加一方面降低了水体的影响,另一方面也增强了辐射源(Lemmetyinen 等,2009)。当融化开始后,亮温又会出现突然升高,前人研究将其归因为气温的升高以及融化开始后冰雪交界面的高发射率(Kang 等,2010)。根据上述现象,可以利用亮温的突变来确定冻结和融化的开始,而在冰厚的增长期,可以构建亮温和冰厚的回归关系,从而将亮温信息转化为冰厚信息。
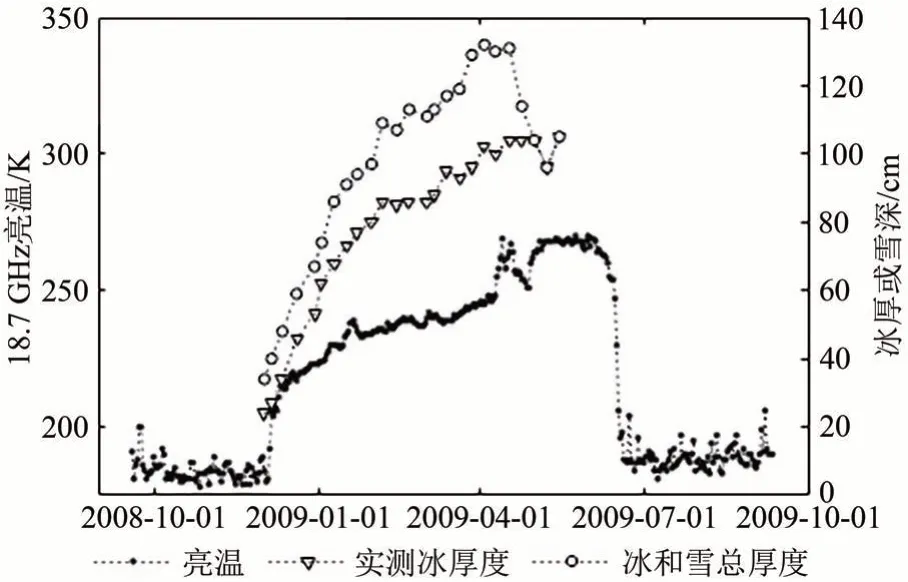
图2 2008年—2009年加拿大大奴湖湖冰及积雪厚度与AMSR-E 18.7 GHz亮度温度Fig.2 Lake ice thickness,snow depth,and AMSR-E 18.7 GHz brightness temperatures of the Great Slave Lake in Canada during the winter of 2008—2009
现有研究利用AMSR-E 18.7 GHz的亮温对加拿大的大熊湖GBL(Great Bear Lake)和大奴湖GSL(Great Slave Lake)湖冰厚度进行了反演(Kang等,2014)。通过测试,高于18.7 GHz 频率的亮温数据穿透深度较小,不能很好地反映湖冰增厚的过程,而小于18.7 GHz 频率的亮温数据空间分辨率过低,且容易受到水体信号的影响,因此18.7 GHz 是较为合适的波段。由于实测冰厚数据较少,为了构建亮温与冰厚的关系,该研究首先使用CLIMo 湖冰模型(Duguay 等,2003)模拟的冰厚来率定上述关系的参数。测试发现线性拟合有较好的精度和鲁棒性,所以该研究直接构建了亮温和冰厚之间的线性关系。最后再利用没有参与率定的模型模拟冰厚和部分实测冰厚数据做验证,反演结果的均方误差RMSE在0.18 m左右。
3.2 基于主动微波的湖泊冰厚反演
3.2.1 基于SAR影像的湖泊冰厚反演
从SAR 影像中提取的后向散射系数在湖冰演化过程中会发生较为复杂的变化,其变化机理仍存在争议。在湖泊结冰之前,存在波浪的湖面是相对粗糙的反射面,因为布拉格衍射效应,湖面的后向散射系数会在高值和低值之间波动。湖面形成片状冰后,反射面变得较为光滑,对雷达波几乎形成了镜面反射,电磁波难以沿着入射方向返回雷达(SAR卫星观测有一定的入射角,通常不是星下点观测,入射方向和反射方向不在同一直线,如图3 中的Ⅰ所示)。所以,此阶段后向散射系数相比于开阔水面明显减小(Duguay 等,2002)。湖面完全冻结,冰厚达到一定程度后,由于冰和水在微波波段的介电常数差异较大(Matzler 和Wegmuller,1987;Murfitt和Duguay,2021),雷达波在冰水交界面的反射会增强(沿着各个方向),后向散射系数也会增大到某一阈值并保持稳定。此后如果冰厚继续增大,直到与湖底相接(水深较浅的湖泊),后向散射系数会再度下降,因为湖冰和冻结的湖底之间介电常数差异较小,所以雷达波在该界面不会形成较强的反射(如图3中的Ⅳ所示)(Antonova等,2016)。关于倾斜入射的雷达波如何从湖冰表面沿着入射方向返回目前仍存在一定的争议,较早的理论认为雷达波发生了两次反射后才沿着入射方向返回传感器(如图3中的Ⅱ所示)。第一次反射发生在冰水交界面上,第二次反射或者散射归因于湖冰内存在的柱状气泡(Weeks 等,1978;Duguay 等,2002)。这一理论面临的困境在于水深大于4 m 的湖泊很少会在湖冰中形成这种柱状气泡。近期的研究认为第二次反射并非影响后向散射系数变化的主要过程,只要冰水交界面存在一定的粗糙度,雷达波在冰水交界面的后向散射(如图3中的Ⅲ所示)已经足以解释后向散射系数的变化(Engram 等,2013;Atwood等,2015;Gunn等,2015)。

图3 SAR雷达冰面信号后向散射机制概念图Fig.3 Scattering mechanisms of SAR signals on the lake ice
现阶段利用后向散射系数测量湖冰厚度的研究有两种思路:(1)直接构建后向散射系数和冰厚之间的回归关系;(2)主要针对水深较浅的湖泊,利用湖冰接地后会发生后向散射系数的突变来间接推算冰厚。第1类方法直接假设在一定范围内后向散射系数和冰厚之间满足线性关系(Murfitt等,2018),后向散射系数随着冰厚增大而增大,该方法在冰厚较小的湖泊精度可以达到0.12 m,但在冰厚超过0.4 m 后可能存在较大误差(Murfitt 和Duguay,2021)。第2 类方法首先利用后向散射系数的突变识别湖冰中接地的部分(即靠近岸边水深较浅的部分),然后根据预先得到的水下地形来反演湖冰的厚度。湖泊的水下地形可以通过观测湖泊水位和面积得到,或者通过实地声纳测量等方法获取(Duguay 等,2003;Hirose 等,2008),这一方法高度依赖于水下地形的精度,相关研究仅论证了反演的冰厚在合理范围内,并未计算精度指标。
3.2.2 基于测高雷达的湖泊冰厚反演
与SAR 影像不同,卫星测高雷达进行的是星下点观测,并不成像,每次观测得到是星下点/测高足迹点到卫星的距离、雷达回波波形、后向散射系数等信息。运用测高雷达反演冰厚目前也有两类方法,一种基于对雷达波形的分析,另一种基于测高雷达的后向散射系数。
测高雷达波形是回波功率关于时间的函数,卫星测高领域通过波形重订技术,可以从回波波形中找到表征反射面位置的特征点或者特征时刻(称为“重订门”),再根据该特征点与参考点(预设门)的偏离值(即提前或滞后的时长)计算距离修正,从而获得更高精度的高程信息(Huang等,2018;Li等,2019;廖静娟等,2020)。湖冰表面返回的雷达回波信号存在典型的双峰值特征,理想条件下两个峰值分别对应了湖冰的上下表面。因此,只要从测高雷达波形中识别出表征湖冰上下表面的特征点,二者的间距就代表了雷达脉冲在冰内传播的时间(双程传播的时间),再根据电磁波在冰中传播的速度,即可计算冰厚。图4展示了基于上述方法计算冰厚的原理,图4(a)为卫星过境时所有湖面波形的堆叠图,图中每一列均表示一个回波波形,纵坐标表示回波波形上各个采样门相对于湖面高程的距离,横坐标表示每个回波波形到湖面足迹点起点的距离,颜色明暗表示回波功率的相对大小;图4(b)为图4(a)中一个回波波形,两个峰值对应的是湖冰的上下表面,阴影区对应雷达脉冲在冰内的传播时间。Beckers 等(2017)利用CryoSat-2 波形反演了大熊湖和大奴湖的冰厚。该研究测试了不同的特征点选取策略,其中,选取波形中第一个峰值和最高的峰值作为上下表面的特征点时反演精度较好,如果第一个峰值恰好也是最高的峰值,则选取第二高的峰值作为第二个特征点。该方法的反演精度RMSE 在0.12—0.33 m,还存在一定优化改进的空间。

图4 2014年3月大奴湖CryoSat-2雷达回波波形Fig.4 CryoSat-2 waveforms from the Great Slave Lake in March,2014
测高雷达在湖泊冻结期的后向散射系数变化,与SAR 影像的后向散射系数变化过程有显著不同(图5)。对于测高雷达而言,开阔水面的后向散射系数相对较低,而湖泊表面形成片状冰后,后向散射系数会迅速达到峰值。此时,湖泊表面对雷达脉冲近似镜面反射,由于测高卫星的雷达波近似垂直入射,所以接收到的回波信号显著增强,对应后向散射系数的突然增大。随着冰厚增加,冰层本身对雷达波有吸收和散射作用,对应后向散射系数随着冰厚增大逐渐减小的过程。在融化即将开始时,后向散射系数会突然下降,可能由于冰或者雪表面融化变质导致。此后随着冰厚在融化期快速减小,冰层对雷达波的吸收和散射作用减弱,后向散射系数再次升高,并在冰完全融化后迅速降低至开阔水面所对应的数值(Zakharova 等,2021)。Zakharova 等(2021)的研究利用测高雷达后向散射系数的峰值确定了冻结时段,在冰厚增长时期构建了后向散射系数累积变化率与实测冰厚之间的回归关系,实现了较高精度的冰厚反演(RMSE 0.07—0.18 m)。采用后向散射系数的累积变化率而不直接使用后向散射系数的原因是可以规避冻结期初始条件的影响,这些初始条件会导致不同年份初始的后向散射系数不同,但具体影响因素仍有待探索。

图5 2013年—2014年冬季大奴湖冰厚及雪深与Jason-2 Ku波段后向散射系数Fig.5 Lake ice thickness,snow depth,and Jason-2 backscattering coefficients from the Great Slave Lake in the winter of 2013—2014
3.3 基于热红外遥感的湖泊冰厚反演
热红外遥感反演湖冰厚度需借助湖冰模型实现。Stefan 方程是一种较为简单的半经验模型(度—日法冰厚模型)——冰厚正比于累积负积温的均方根。利用MODIS LST 数据可以计算累积负积温,再选取适当的度日因子即可计算得到冰厚。如果有风速、辐射、湿度等其他气象驱动数据,MODIS LST 也可以用于更为复杂的湖冰模型。这类模型通常以MODIS LST 作为上边界条件,以凝固点作为下边界条件解算湖冰内部的温度场,再通过上表面和下表面的能量平衡方程计算湖冰的消长量(Li 等,2022)。其中,上表面能量平衡方程一般包含长波和短波辐射,显热通量、潜热通量(升华、融化等)以及冰层内部的热通量,而下表面能量平衡方程主要包含冰层内部热通量与水冻结时产生的潜热通量。这类方法对湖冰的物理过程进行了较多的简化和假设,模拟精度也依赖于假设的合理性,在不同地区模型参数以及模型的表现可能差异较大(Pour等,2017)。
4 湖泊冰厚遥感反演效果及评价
4.1 各类遥感反演方法的优缺点
各类遥感冰厚反演方法的表现可以从鲁棒性(物理基础和算法流程复杂程度)、普适性(可覆盖的湖泊数量)、连续性(可覆盖的时段)、完整性(是否能完整捕捉湖冰演化过程,主要通过时间分辨率判断)、准确性等几个维度进行评价,而这些特性主要取决于其依托的遥感数据集以及反演算法的基本原理。不同遥感反演方法的比较见表1。
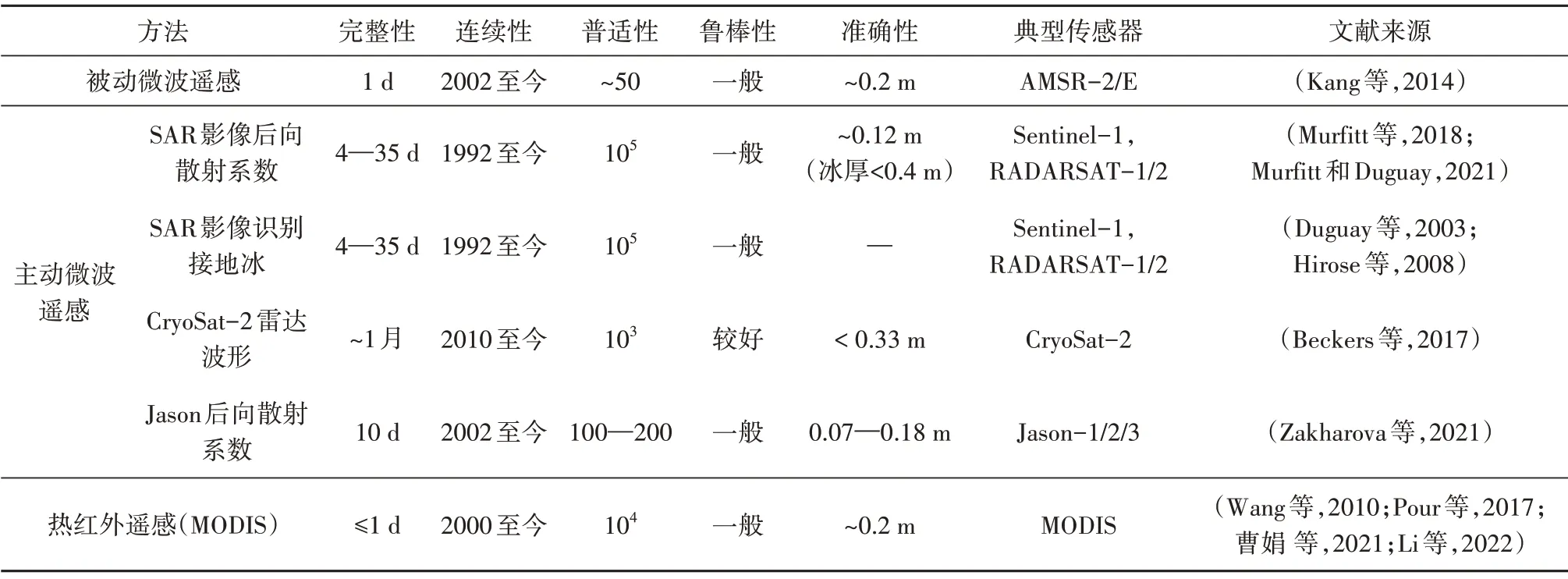
表1 各类冰厚遥感反演方法比较Table 1 Comparison between different LIT retrieval methods
被动微波遥感反演方法依托于AMSR-E/2亮温数据,可以实现逐日连续冰厚监测,观测完整性和连续性较好。但由于AMSR-E 和AMSR2 数据之间间隔了数月,2011年—2012年冬季无监测数据。另一方面,被动微波遥感方法的空间分辨率整体较低(约30 km),不仅要求湖泊有较大的水域面积,还需要保证湖泊形状尽可能规则,通常难以覆盖面积小于1000 km2的湖泊。现阶段该方法依赖于实测或者模拟冰厚构建亮温与冰厚的回归方程,无法保障参数移植到其他湖泊的鲁棒性。整体上,方法的普适性较差,鲁棒性一般。在准确性方面,测试湖泊的反演精度能达到0.2 m 以内,准确性相对较好。
主动微波遥感反演方法分为4类讨论:
(1)基于SAR 影像后向散射系数和冰厚之间回归关系的方法。不同SAR 卫星具有不同的重访期和服役周期,现阶段还没有出现融合多源SAR影像反演冰厚的案例,未来该方法在湖泊冰厚反演的完整性和连续性方面有较大的提升潜力。SAR影像还具有较高的空间分辨率,可以覆盖中小型湖泊,因此该方法普适性较好。但因为该方法依赖于回归参数,鲁棒性一般。现阶段该方法的准确性也不佳(R2在0.6 左右),且当冰厚超过0.4 m时该方法存在明显偏差(Murfitt和Duguay,2021),有待优化改进。
(2)基于SAR 影像识别接地冰并结合水下地形反演冰厚的方法。该方法的完整性、连续性方面同上,具有较强的物理基础,可以覆盖已知水下地形的中小湖泊,整体上更适用于水深较浅的湖泊。该方法反演精度和可靠性的制约因素较多,如水下地形的精度、接地冰识别算法的精度等。相关研究没有给出具体冰厚反演误差,只论证了反演的最大冰厚在合理范围内,故该方法的准确性仍待探讨。
(3)基于CryoSat-2 测高雷达波形信息的冰厚反演方法,该方法的完整性不佳(完整重访周期一年,子周期为一个月),普适性较好(地面轨道覆盖密集)。CryoSat-2 数据从2010年至今,时间跨度相对较短,观测连续性一般。基于波形的冰厚反演方法物理基础较强,算法复杂度较小,不易受到研究区变化的影响,因而具有较好的鲁棒性,适用于缺乏实测资料的湖泊。在精度方面,该方法在测试湖泊的反演精度在0.3 m 以内,仍有改进的空间。
(4)基于T/P 和Jason 系列卫星测高雷达后向散射系数的方法。该方法的连续性较好(1992年至今),可用于构建长时间序列的冰厚数据,时间分辨率为10 d,基本可以实现冰厚演化过程的完整监测。但由于该方法基于回归参数,且Jason 系列卫星的地面轨道覆盖较为稀疏,所以鲁棒性和普适性一般。在准确性方面,该方法在有率定数据的测试区域精度可以达到0.07—0.18 m。
基于热红外信息的冰厚反演方法(以MODIS LST为例)具有较好的完整性和连续性,1 km的空间分辨率可以覆盖较多的湖泊,普适性较好。缺点在于湖面积雪的物理过程较为复杂,模型假设和简化较多,部分经验参数也依赖于实测率定,因此鲁棒性一般。在测试地区经过率定后该类方法估算冰厚的精度可以达到0.2 m左右(Pour等,2017)。
4.2 遥感反演结果的验证
现有研究中冰厚遥感反演结果的验证可以分为3种形式:以实测冰厚数据验证、与湖冰模型模拟结果交叉检验、根据历史观测资料作定性分析。20 世纪90年代以前,加拿大、苏联等高纬度国家对其境内的湖泊冰厚进行了连续的监测,积累了较为丰富的冰厚观测资料,时间分辨率通常可以达到周尺度。但最近30年湖冰厚度的监测数据大幅度减少,例如加拿大境内的湖泊冰厚观测站点从几十处锐减至个位数,目前仅保留了贝克湖(Baker Lake)和大奴湖(Great Slave Lake)两个湖冰厚度监测点。由于遥感冰厚反演的时段主要是90年代以后,这一时期实测资料的稀缺给反演结果验证造成了较大困难。因此,部分湖冰研究不得不采用湖冰模型交叉验证和历史资料定性分析的方式。一些研究者自行开展野外冰厚数据的采集。观测方式主要有:钻孔测量、声纳测量、测温线缆、电阻测量(雷瑞波等,2009)等。目前大多数实测数据来自于钻孔测量,需要人员前往冰上作业,具有较高风险。声纳测量有多种方式,例如在水下安装声纳,测量湖冰底部到声纳的距离,同时用雷达等设备测量冰面的高程,从而确定冰厚。测温线缆可以通过测量连续的纵剖面温度判断湖冰厚度。上述方法均存在成本高昂,作业环境恶劣等问题,导致这些独立观测的冰厚资料数量也较为有限。研究中出现过的实测冰厚资料如表2所示。

表2 湖冰研究中出现的部分实测冰厚资料Table 2 In situ measurements in relevant LIT studies
5 湖泊冰厚遥感反演现存问题及发展趋势
GCOS 对湖冰厚度监测精度要求为1—2 cm,现阶段的遥感反演方法均无法达到这一标准。整体上各类遥感反演湖泊冰厚的主要障碍包括:(1)湖冰表面积雪在时空分布、物理性质等方面存在较大差异性,增加了湖冰演化过程的复杂程度,制约了湖冰反演模型的普适性和准确性;(2)验证资料相对有限且不易获取,不少研究以单个湖泊一到两个冬季的实测冰厚作率定或验证,难以保证方法在较长时间段和更大范围内的可靠性;(3)不同遥感冰厚反演方法在物理机制和数据源方面差异较大,大多没有形成开源数据产品,导致难以对各类方法、数据进行整合和融合。
湖冰表面积雪的物理属性复杂,区域差异性显著,对湖冰过程本身和来自湖冰的遥感信息均有较大的影响。一方面,积雪的导热性小于湖冰,在湖冰冻结初期表面积雪起到“保温”的作用,阻碍湖冰的累积。另一方面,积雪的反照率较高,可以减小湖冰对太阳辐射的吸收。如果积雪重量超过了湖冰所产生的浮力,湖水会侵入并淹没部分积雪,被淹没的部分会冻结形成雪冰,在太阳辐射作用下融化的雪水也可能在冰雪交界面再次冻结形成雪冰。各类遥感反演方法均依赖于从湖冰发射、反射或者散射的电磁波信号,而表面积雪会显著影响电磁波的传播过程,例如有积雪存在时主动微波遥感的后向散射系数可能会增大(Gunn 等,2015),从而影响后向散射与湖冰厚度回归关系的稳定性,而积雪融化过程会影响被动微波遥感的亮度温度(Kang等,2010)。
尽管表2列举了一系列湖冰厚度实测资料,但不同来源的实测数据之间缺乏统一的观测设备、标准和流程,数据质量和一致性方面可能存在诸多问题。以加拿大Baker Lake冰厚观测资料为例,根据当地气象站的观测资料,该地区冬季最大雪深通常在50 cm 以上,但从湖面采集的冰厚和雪深资料却显示,湖面积雪深度一般不超过20 cm(图6),与气象观测资料存在明显的不一致。另一方面,大量湖冰领域的实测资料还存储于纸质媒介,对于绝大多数研究者处于不可见的状态,难以得到充分的利用(Woolway等,2020)。
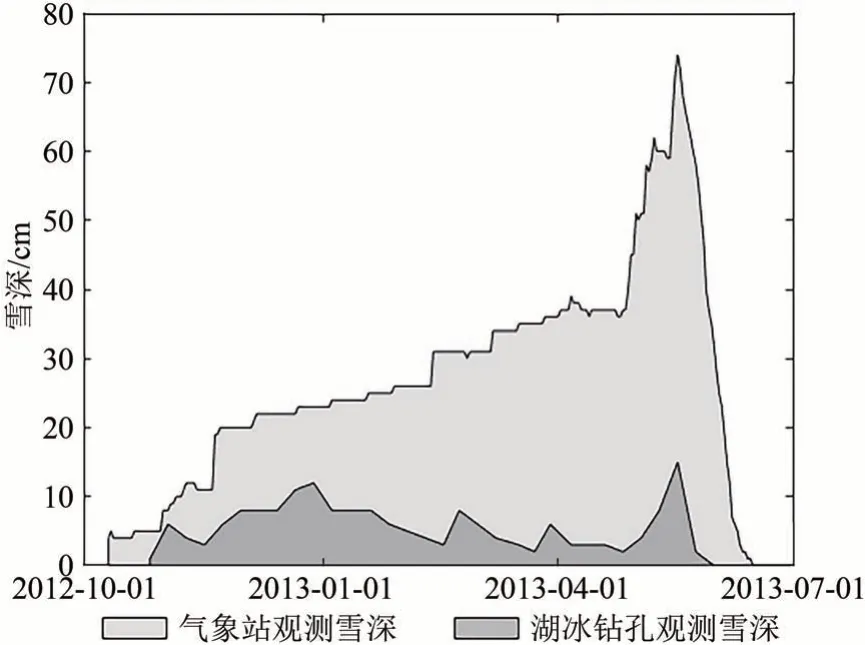
图6 2012年—2013年冬季加拿大贝克湖(Baker Lake)湖面实测雪深和气象站实测雪深Fig.6 In situ lake ice thickness measured by a meteorological station near the Baker Lake and by drill holes on the lake ice of the Baker Lake in the winter of 2012—2013
湖冰厚度研究领域的交叉融合还存在不足。以湖冰模型和遥感反演方法为例,现阶段研究大多止步于运用湖冰模型对遥感反演方法做交叉验证或参数率定,尚未利用数据同化方法将遥感观测与湖冰模型统一,没有充分发挥二者的优势,形成高时空分辨率、高精度的湖冰厚度数据产品。除此以外,各类冰厚遥感反演算法也缺乏交叉融合,导致现阶段湖冰研究的信息源往往过于单一,时空覆盖范围有限,缺乏对不同反演方法的横向比较与论证。近期的一些研究已经在整合不同遥感反演方法以及湖冰模型的方向上做了有益的尝试,例如将基于测高雷达波形的冰厚反演方法拓展到T/P 和Jason 系列测高卫星,研制了长时段的测高冰厚数据用于验证湖冰模型,并将MODIS 地表温度与湖冰模型融合,提升湖冰模型的鲁棒性和普适性(Li等,2022)。
综上,判断未来湖冰厚度领域的研究有如下发展趋势:(1)针对湖冰表面的积雪问题,未来研究应将遥感观测与湖冰模型更加紧密地结合,厘清湖冰表面积雪的物理过程及其对湖冰厚度遥感反演算法的影响,例如通过遥感雪深信息优化湖冰表面积雪的参数化方案、建立辐射传输模型描述积雪对遥感冰厚反演的影响等;(2)针对实测资料稀缺的问题,未来研究应逐步整合实测和遥感湖泊冰厚资料,结合湖冰模型进行数据同化,形成统一的全球湖泊冰厚数据集,为相关领域的研究提供更充分的率定或验证资料;(3)针对湖冰厚度遥感方法交叉融合不足的问题,未来研究应推进多源遥感冰厚信息数据集成,提升遥感冰厚的时空分辨率和精度,并依托新一代观测平台(星载、机载、地面)开发新的冰厚反演算法,进一步丰富湖冰厚度信息源,例如基于ICESat-2,Jason-CS,SWOT 等新一代测高卫星或者SAR 卫星进行冰厚反演算法开发。
6 结 语
湖冰厚度信息对气候变化研究和社会生产实践均有重要价值,本文梳理了近年来不同类型遥感平台应用于湖冰厚度遥感反演的最新进展,其中主被动微波遥感方法可以建立遥感信息与其观测时刻的冰厚之间的关系,在应用中较为灵活简便,也是现阶段研究探索的热点方向。热红外遥感方法则需要借助湖冰模型,通过模拟湖冰生长消融等物理过程来估计冰厚,需要一段时期内的连续观测,同时需要对湖冰物理过程有较为清晰的认识。
整体而言,传统和新型遥感平台在湖冰厚度观测方面的潜力在被不断发掘,但该领域的研究还存在诸多挑战:无论微波还是热红外遥感,湖冰表面积雪往往都是冰厚反演不确定性的主要来源,需要深入认识积雪演变的物理过程及其对遥感信息所造成的影响;实测资料的稀缺限制了遥感反演方法的验证,不同来源的实测资料在时空分辨率、测量手段等方面也存在较大差异,数据标准化和共享程度有待提高;基于不同传感器的反演方法各有其优缺点且差异显著,现阶段研究尚未发挥出多源遥感信息融合的优势,遥感冰厚的时空分辨率和反演精度有待进一步提高。
猜你喜欢
河南科技(2021年35期)2021-04-25
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
学校教育研究(2018年8期)2018-07-09
阅读(低年级)(2018年4期)2018-05-14
文理导航·科普童话(2017年4期)2018-02-10
地震研究(2017年3期)2017-11-06
小学阅读指南·低年级版(2017年2期)2017-03-23
CHIP新电脑(2016年3期)2016-03-10
微型计算机(2009年4期)2009-12-23
数码摄影(2009年12期)2009-12-07
