四电平浮动交错Boost DC/DC 变换器研究
2022-08-08 01:37安江伟
河南科技学院学报(自然科学版) 2022年4期
安江伟
(河南理工大学电气工程与自动化学院,河南 焦作 454000)
单体燃料电池电压一般低于1 V,需要将单体电池堆叠成燃料电池堆,这势必导致燃料电池堆体积和重量增大.车载燃料电池体积一般不大,输出电压较低,不能直接驱动汽车电机,需要在燃料电池和逆变器直流母线之间添加合适的DC/DC 变换器,将燃料电池电压升到合适的电压等级[1-3].
DC/DC 变换器可以分为隔离型和非隔离型.非隔离型DC/DC 变换器主要包括:buck 变换器、boost变换器、buck-boost 变换器、cuk 变换器、sepic 变换器、zate 变换器[4].通过在非隔离型变换器的拓扑结构中加入变压器并进行改进可以得到隔离型DC/DC 拓扑结构,主要有正激式、反激式、推挽式以及桥式四类[5-8].但隔离型DC/DC 变换器拓扑中引入了变压器,故而体积大、成本高.目前,具有结构简单、控制容易等优点的非隔离型DC/DC 变换器广泛应用在燃料电池汽车中.为了获得高增益的变换器拓扑,目前主要采用的方法有三种,分别为级联型[9-12]、耦合电感型[13-15]、开关电容型[16].DC/DC 变换器根据电平数不同可以分为两电平和多电平结构.两电平DC/DC 变换器的开关管电压应力大.DC/DC 变换器工作在高电压大容量场合,需要具有电流纹波小、电压应力小、谐波失真小等优点,三电平和多电平符合上述要求.文献[17]提出将两个boost 三电平变换器并联,不具有高增益的特性.文献[18]提出悬浮交错boost 变换器方案,其具有高增益特性,但该变换器开关管承受的电压应力较大.
为此,本文针对四电平DC/DC 变换器升压比低的问题,提出了四电平悬浮交错boost DC/DC 变换器(Four-level Floating-output Interleaved-input Boost DC/DC Converter,FL-FIBC),并对其拓扑结构及其工作原理进行分析研究,针对非交错调制方式下输出电压纹波大的情况,采用交错调制方式;针对DC/DC变换器的强非线性、强耦合特性,设计了模糊PI 控制策略.将模糊控制算法与PI 控制相结合,通过设计模糊控制规则,实现了对PI 参数的实时整定.通过在MATLAB 中搭建仿真,验证了所设计控制器的有效性.
1 FL-FIBC 拓扑结构
FL-FIBC 拓扑结构如图1 所示,由两个四电平boost 变换器模块交错并联构成,形成了输入输出不共地的拓扑结构.其中,Q1~Q6为开关管,L1、L2为升压电感,D1~D6为二极管,Vin为输入电压源,Cf1、Cf2为前级飞跨电容,C1、C3为后级飞跨电容,C2、C4为后级电容,R 为负载,Vout为直流母线侧电压.
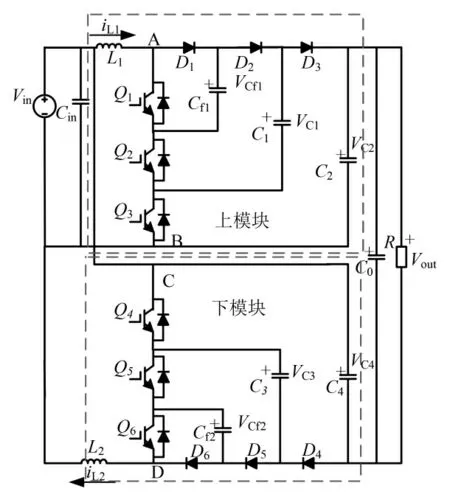
图1 FL-FIBC 拓扑结构Fig.1 FL-FIBC converter topology
由图1 可得FL-FIBC 的输入输出关系为,输出电压为两模块电容电压的和减去输入电压,即

式(1)中:VC2、VC4分别为后级电容C2、C4端电压.
假设变换器工作在理想情况下,对称点的器件参数相等.由伏秒平衡原理得出变换器的电压增益,也即电感L1 在一个周期内充放电电荷相等,可得FL-FIBC 输入输出电压关系,如下表达式
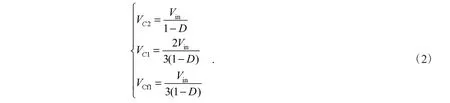
由上下模块的对称关系可得
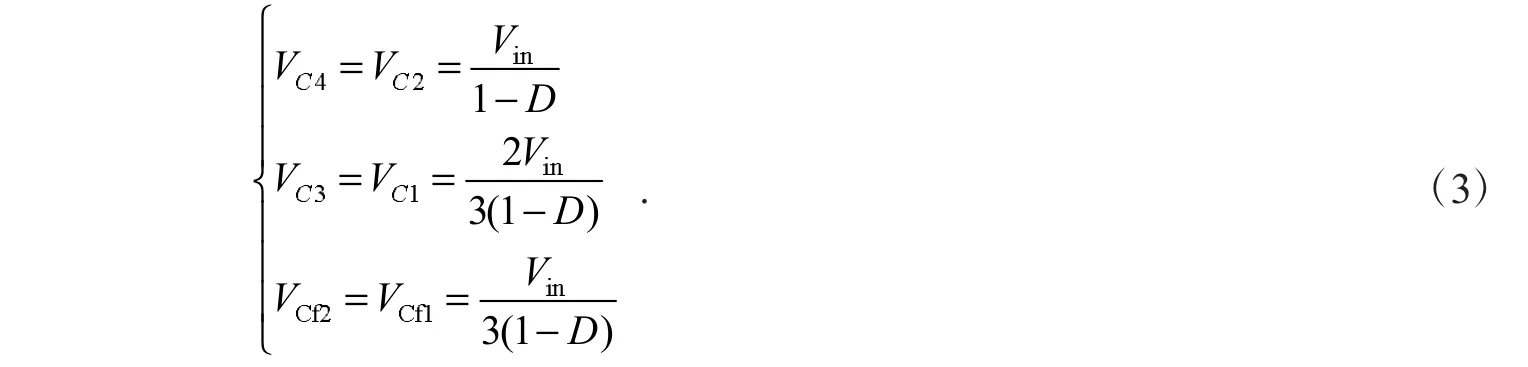
在理想情况下,即前级飞跨电容电压相等,即式(3),联立式(1)、(3)可得

式(4)中:VCf1、VCf2分别表示上下模块的前级飞跨电容电压,VC1、VC3表示上下模块的后级飞跨电容电压.
将式(3)中的参数代入式(1)可得电压增益为

故输入电流Iin和输出电流Iout的关系为

由式(5)可知,FL-FIBC 的升压比为(1+D)/(1-D).相较四电平boost DC/DC 变换器的电压增益升高,与TL-FIBC 相比,其开关的电压应力降低,为Vin/[3(1+D)].为此表1 中分析了四种拓扑结构中开关管的电压应力、增益、电流应力.

表1 四种拓扑开关管应力及增益对比Tab.1 Comparison of stress and gain of four topology switches
由表1 可知,FL-FIBC 相对于普通的两电平boost 变换器而言, 开关管的电压电流应力及增益均有较大提高.另外,FL-FIBC 和TL-FIBC 的电压增益相等,但FL-FIBC 的开关管电压应力较低.
以上分析可知,FL-FIBC 具有高增益特性;开关管电压应力为输入电压和输出电压和的六分之一;结构简单,输入输出不共地;变换器的各部分电压电流纹波相对较小.
2 工作原理分析
假设变换器工作在连续电流模式(CCM),正常工作时各个电容电压满足式(3).定义开关管导通为1,开关管关断为0.其开关管Q1、Q2、Q3的导通时间定义为占空比Dn(n=1,2,3),用开关管Q1、Q2、Q3的导通、关断状态描述四电平boost 变换器的工作情况.其工作模态可以根据开关管Q1、Q2、Q3占空比的大小分为三种开关模式,令三个开关管的占空比相等,即D1=D2=D3=D,这些模式通过三个控制信号的和来表示,分别为0≤D<1/3、1/3≤D<2/3、2/3≤D<1.其子模块的工作情况如表2 所示.

表2 子模块工作情况Tab.2 Sub module operation
由表2 可知,子模块在一个开关周期内存在四个电平,分别为VC2、VC1、VCf1、0.
四电平boost 变换器的电压电流波形如图2 所示,其中包括Q1、Q2、Q3的驱动波形,电感电流iL1的波形和AB 两点的电压波形.图2-a 为变换器在开关模式1 时的工作特性,图2-b 为变换器在开关模式2时的工作特性,图2-c 为变换器在模式3 时的工作特性.
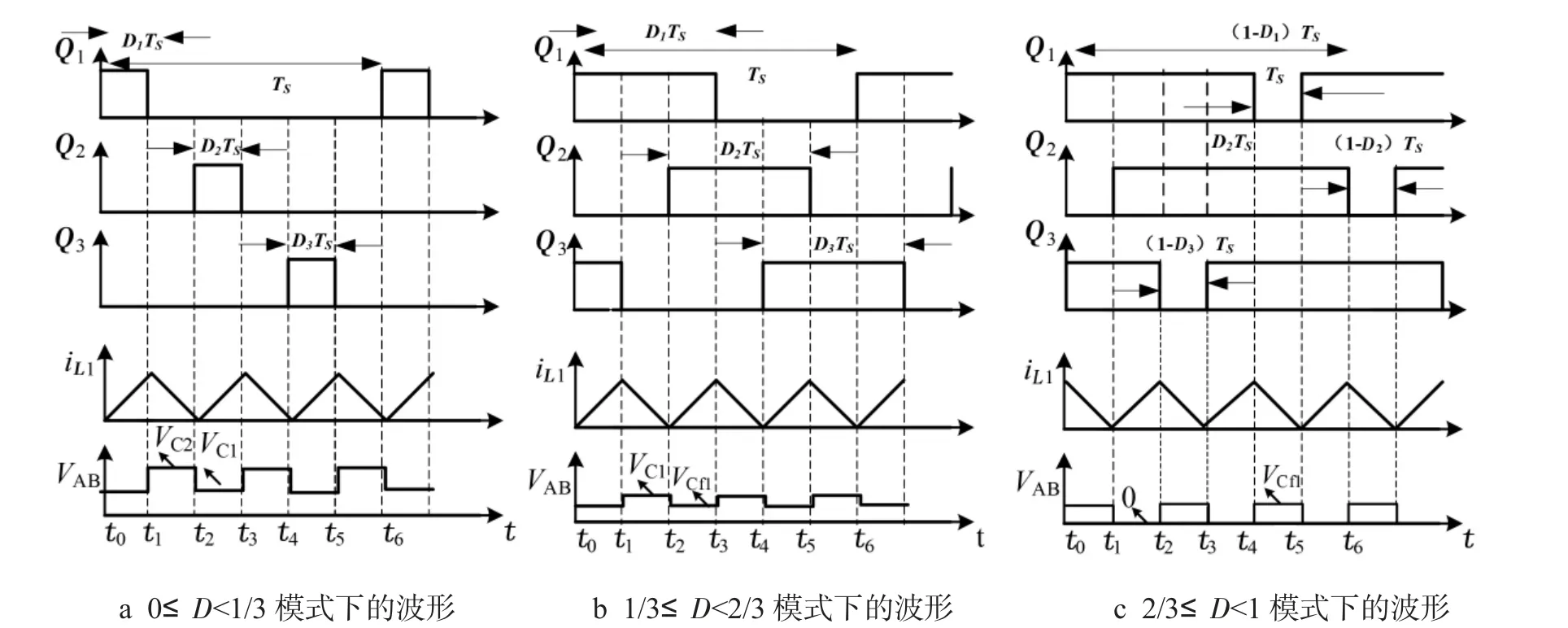
图2 boost 四电平变换器主要波形Fig.2 Main waveforms of Boost four-level converter
从图2-a 中可以看出,开关管不会同时导通,但是在图2-b、图2-c 中会出现开关管同时导通的工作情况.从图中还可以看出,变换器电感电流的脉动频率是开关管脉动频率的两倍.针对这一特征,当电感的脉动频率增加时,在其它条件不变的情况下,可以适当减小电感量,缩小电感所需要的成本.另外,当变换器工作在情况1 时,变换器只有四种开关模态:S0=000、S1=001、S2=010、S4=100,而不存在两个开关管同时导通的情况;当变换器工作在情况2 或3 时,其开关模态为:S3=011、S5=101、S6=110、S7=111.
3 调制策略
FL-FIBC 有6 个开关管要驱动,且每个开关管的导通时间相同,器件Q1~Q3、D1~D3构成上模块,器件Q4~Q6、D4~D6构成下模块.同一模块的开关管的驱动信号移相120°,上下模块开关管的导通相位不同导致电容电感充放电顺序不同,采用相位交错导通方式可以降低电压纹波.以此根据开关管的相位关系,将电路分为非交错调制方式与交错调制90°导通方式,具体调制方式如表3-1 所示.两个模块形成悬浮交错的关系,子模块的工作原理与四电平boost 变换器相同.

表3 调制方式表Tab.3 Modulation method table
交错调制方式为模块对称点的开关管导通相位相等,通过分析可知,上下模块对称点开关信号交错导通,采用此种方式能够有效降低输出电压纹波,提高电能质量.其中导通方式的工作波形如图3 所示.非交错模式和四电平boost 变换器的工作波形相同,如图2 所示.
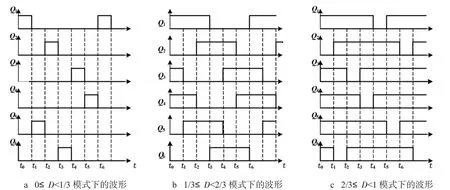
图3 FL-FIBC 主要波形Fig.3 Main waveform of FL-FIBC
图3 中Q1~Q6表示FL-FIBC 开关管驱动信号.FL-FIBC 变换器采用交错调制时,其输出电流由两个模块的升压电感波形叠加而成.对称点模块的开关管的驱动信号交错90°,且上下模块对称,其两升压电感的充放电时间相同,电流的上升和下降斜率也一样,iL1、iL2的增大和减小会形成互补状态.叠加的电流呈现零纹波输出,有效降低了输出电流纹波.
4 控制策略分析
FL-FIBC 具有非线性、时变的特性,难以建立变换器的精确数学模型,故传统的线性控制难以获得预期的效果.因此,将PI 控制与模糊理论相结合,其中电压外环采用模糊PI 控制,电流内环采用PI 控制.采用模糊PI 控制,当系统工况发生变化时,参数具有自适应调整能力,提高了系统的动态性能.模糊控制器是由模糊化、知识库、模糊推理和清晰化四部分组成,基本结构如图4 所示.
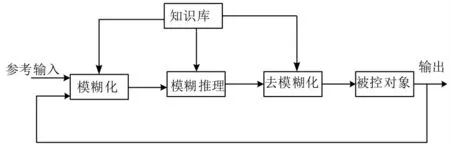
图4 模糊控制器的结构Fig.4 Structure of fuzzy controller
模糊PI 控制器的工作流程为,首先采样输出电压并与参考电压对比得到输出的偏差e 和偏差变化率ec,经模糊控制器后输出ΔKP、ΔKi然后与kp、ki相加,改变参数以适应被控对象特性的变化,在此仿真中采用二维的Mamdani.通过模糊规则对PID 的三个参数进行实时地调整,以达到对不同时刻的PID参数进行自整定的目的,其结构如图5 所示.
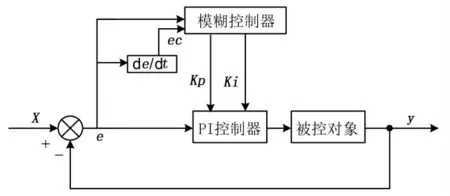
图5 模糊PI 控制结构Fig.5 Fuzzy PI control structure diagram
模糊控制器是模糊PID 控制器的关键,模糊控制器先把输入变量的清晰值经过量化因子变为模糊值,以方便模糊推理机进行推理.模糊化模块设计:精确量的模糊化、模糊规则库的制定、模糊推理、解模糊化.
(1)输入输出变量的模糊化.本文选择清晰量e 和ec,PI 控制器中的参数ΔKP、ΔKi进行转换,使其变换到各自的论域范围.e 和ec 经过模糊化处理后得到的模糊化变量为E、EC.取e 和ec 的论域范围(-3,3),kp、ki的论域分别为(-1,1)、(-60,60),取七个模糊子集,语言变量值取为{NB NM NS ZO PS PM PB},分别表示{负大负中负小零 正小正中正大}.利用MATLAB Fuzzy 工具箱作出e、ec、kp、ki的论域和语言变量.中间选用三角函数作为系统的隶属度函数.NB 和PB 的隶属度函数分别选用Z 型和S 型.
(2)模糊规则库的设计.模糊控制的核心是建立模糊规则.根据PI 调节的比例环节、积分环节的调整过程,通过检测每个时刻的系统输出e 和ec 的大小,根据模糊规则得出PI 控制器参数的修正量,在线整定控制系统中的两个参数kp、ki,对PI 在不同工况下的自整定应满足以下规则:
1)误差|e|较大时,kp值应较大,ki值应尽可能小,这可以减少响应时间和超调量;
2)误差|e|中等时,为减小超调量,kp应当减小.为了系统的响应速度,ki取中等值;
3)误差|e|较小时,为避免在设定值附近震荡,ki应当增大,同时kp减小.
通过上述规则,建立的模糊规则如表4 所示.
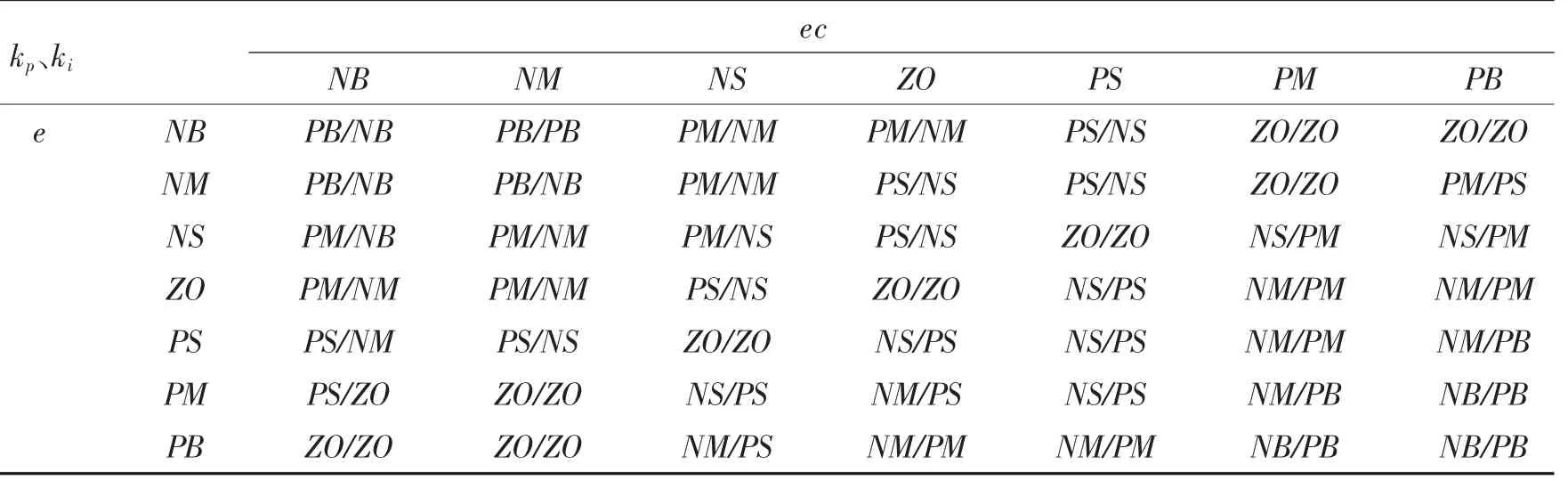
表4 kp、ki 模糊控制规则表Tab.4 kp、ki Fuzzy control rule table
(3)模糊推理和解模糊化.模糊推理是根据专家经验等已经指定好的一组模糊规则,并根据该规则进行模糊逻辑推理.
通常使用IF…then…条件语句进行表达,总共有49 条规则,如:
1)、IF(e is NB)and(ec is NB)then(is PB)and(is NB);
2)、IF(e is NB)and(ec is NM)then(is PB)and(is PB);
┆
49)、IF(e is PB)and(ec is PB)then(is NB)and(is PB).
以上通过模糊推理得到的结果仍然是模糊量,需要进行解模糊化处理.本文采用重心法.
5 电路仿真与分析
为了验证FL-FIBC 的稳态特性,在MATLAB/Simulink 中搭建仿真模型.设计输入电压Vin=100 V,输出电压Vout=700 V,设计电容电压纹波系数为1%、电感电流纹波系数为10%,开关频率fs为50 KHz.参数选型如表5 所示.
表5 变换器仿真参数Tab.5 Converter simulation parameters
5.1 不同调制方式下稳态性能对比分析
为了验证FL-FIBC 参数设计的正确性及其稳态特性,对变换器的稳态特性进行仿真,仿真后得到变换器电压电流波形如下所示.
图6、图7 分别为变换器运行在非交错调制与交错调制方式下各参数波形.
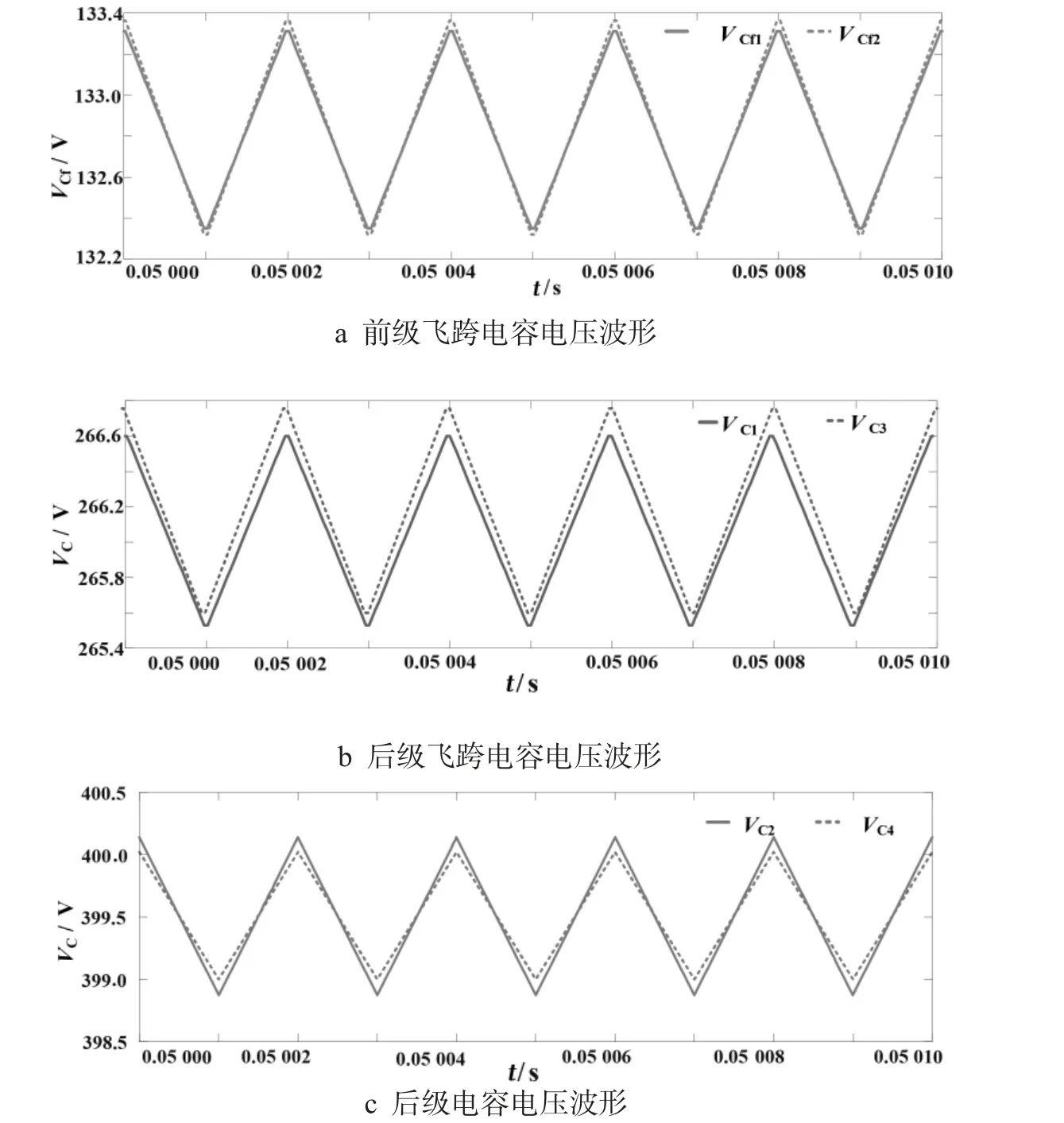
图6 非交错调制方式下各个电容电压波形Fig.6 Voltage waveform of each capacitor under non interleaving modulation mode
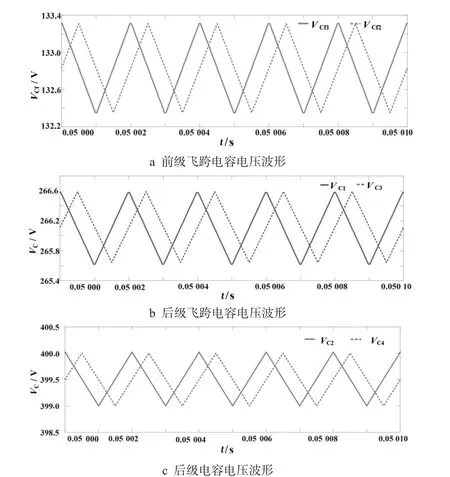
图7 交错调制方式下各个电容电压波形Fig.7 Voltage waveform of each capacitor under non interleaving modulation mode
图6 表示的是非交错调制下的电容电压波形,图7 表示的是交错调制下的电容电压波形.在两种调制方式下前级飞跨电容电压VCf1、VCf2稳定在133.33 V,后级飞跨电容电压VC1、VC3稳定在266.67 V,后级电容电压VC2、VC4稳定在400 V,分析可知,当变换器工作在交错调制方式下,其各个电容电压的纹波相较非交错调制方式下小.
图8 为两个升压电感电流及叠加后波形.当采用交错调制时,叠加后的电流纹波降低.
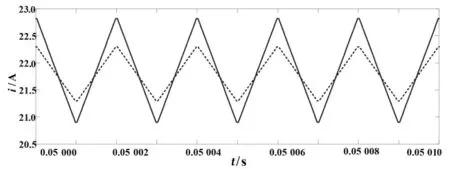
图8 非交错与交错调制下电感电流波形Fig.8 Inductor current waveform under non interleaving and interleaving modulation
图9 为输出电压波形,其中实线表示非交错调制方式,虚线代表交错调制方式.从图可以看出,两种调制方式下输出电压稳定在700 V.其中,在非交错调制方式下,Vout纹波电压约为4 V;在交错调制方式下,Vout纹波电压约为2 V.当电路工作在交错调制方式下,输出电压纹波得到了改善.
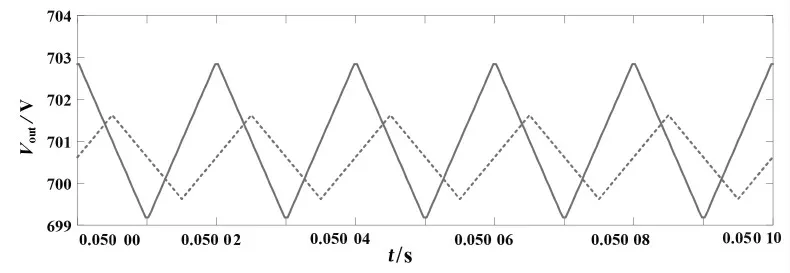
图9 非交错与交错调制下输出电压波形Fig.9 Output voltage waveform under non interleaving and interleaving modulation
当电路工作在交错调制方式时,为了验证所设计控制策略的有效性及变换器系统的稳定性,对变换器进行仿真测试.
5.2 模糊PI 仿真分析
在MATLAB/Simulink 中搭建仿真模型验证模糊PI 控制策略的正确性.
图10 为稳态下变换器的输出电压波形图.
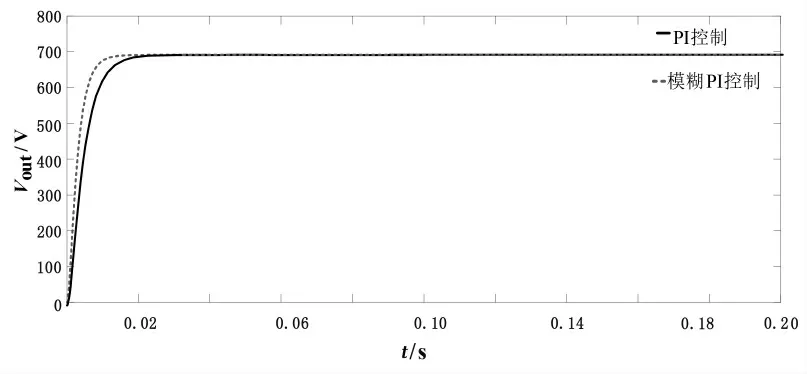
图10 输出电压波形Fig.10 Output voltage waveform
由图10 可以看出,当系统控制器采用模糊PI 控制时,变换器的动态响应要优于PI 控制,提升了系统的动态性能.图11 为对变换器作负载突变与输入电压突变时变换器的输出响应.
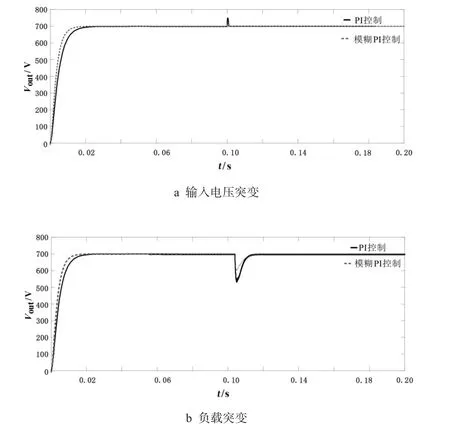
图11 各扰动下输出电压波形Fig.11 Output voltage waveform under each disturbance
图11-a 为0.1 s 时输入侧电压突变至400 V 时的输出电压波形.由图中可以看出,当系统控制器采用模糊PI 控制时,输出电压的波动值要小于PI 控制.图11-b 为0.1 s 时输出侧并联200 Ω 电阻后的输出电压波形.由图中可以看出,当系统控制器采用模糊PI 控制时,输出电压的跌落值要小于PI 控制.
由上述分析及仿真可知,当变换器采用模糊PI 控制时,系统的动态响应要由于PI 控制,提升了系统的动态性能.
6 小结
本文提出了FL-FIBC 高增益电路拓扑,开关管的电压应力降低,通过分析变换器不同调制方式下的稳态性能,得出了交错调制方式下,电流纹波降低.针对变换器的非线性、强耦合特性,设计了模糊PI 控制策略,实现了对PI 参数的实时整定.通过在MATLAB/Simulink 中搭建仿真,验证了当变换器工作在模糊PI 控制策略时,系统的动态性能得到了提升.因此,FL-FIBC 不仅具有高增益的特性,而且当其采用模糊PI 控制算法时,能够实现系统更好的控制性能.
猜你喜欢
电工技术学报(2022年20期)2022-10-29
电子科技(2022年10期)2022-10-15
原子能科学技术(2022年9期)2022-10-10
电源学报(2022年4期)2022-08-05
航空学报(2021年7期)2021-08-03
科学家(2021年24期)2021-04-25
科学与财富(2020年24期)2020-10-27
速读·下旬(2019年3期)2019-04-11
电机与控制学报(2018年9期)2018-05-14
科技视界(2018年24期)2018-01-03