基于LoRa技术的两栖无人机环境监测系统设计
2022-08-04 09:27:46王若岩刘洪玮王廷煜沈世培
实验室研究与探索 2022年3期
王若岩, 刘洪玮, 王廷煜, 沈世培, 张 敏
(哈尔滨工业大学(威海) 信息科学与工程学院,山东 威海 264200)
0 引 言
如何低成本、高精度、方便快捷地完成环境数据采集工作是环境监测研究中的核心与难点[1]。目前,主流水质监测站存在机动性差、功耗高、体积巨大、数据系统性、代表性不足等问题[2-3];空气质量监测站存在流动性差、成本高、执法时效性低(传统监测方式无法对某些企业短时间内违规排放废气的行为进行执法取证)等问题[4];人工实地采样则存在效率低、周期长、一些场合危险系数较高等问题。近年来,随着通信技术、计算机技术、自动化控制技术的快速发展,为环境质量监测提供了新思路,越来越多的智能环境监测设备投入使用。使用ZigBee通信组网技术的远程环境监测人机交互系统[5],虽然增强了环境监测系统的稳定性与可拓展性,但无法实现远距离与低功耗的统一,且成本较高。本文采用LoRa通信技术[6-9],充分发挥无人机灵活机动,不受空间、地形限制的优势,采用两栖结构设计与GPS导航控制,可自主完成指定区域的环境监测任务,成本低廉、操作方便,节约了大量人力物力资源。此外机身的选材、整体架构充分考虑了节能减排、生态环保的理念,符合国家提倡的科学技术绿色发展战略。
1 系统总体方案设计
系统结合无人机技术、LoRa组网技术与新型结构技术,自主设计的一体化海空传感器数据采集传输系统、环境监测巡航控制系统、环境指标研判系统及轻量化高强度可循环利用的两栖结构系统实现广域环境污染物的多点监测,系统各部分组成及关系如图1所示。

图1 系统总体方案设计
环境监测巡航控制系统以无人机为载体,在姿态模块与GPS模块的共同作用下,实现无人机的自稳姿态控制、垂直定高控制、室外观测点的巡航定位功能。海空传感器数据采集传输系统对观测点的环境数据进行实时采集,经单片机处理、分析,将所得的温度值、PM2.5浓度值、pH值等数据通过LoRa模块回传。环境指标研判系统实时接收所得数据,更新观测点环境质量的分析结果,方便研究人员对当前环境状况进行研判。
2 系统硬件设计
2.1 两栖结构设计
选用质地轻、强度高的全碳纤维机身材料,整机质量仅1.4 kg,对称轴距为330 mm。在12 V左右的额定工作电压下最大平飞速度可达6 m/s,最高载重0.9 kg,抗风等级为4级。机身与保护圈设计融为一体,避免桨叶直接接触外部环境,降低对周边环境造成伤害的可能性,体现了生态环保的理念;轻量化设计则提高了无人机的续航能力。整体架构如图2所示。

图2 无人机机身装配和结构图
为实现无人机水上作业功能,设计了四面浮力架,极大提高了无人机海面着陆的稳定性。选择EPE[10-11]材料作为漂浮装置的主体。该装置可根据监测应用背景不同反复拆卸、多次使用,进一步提高资源利用率。
2.2 一体化传感器数据采集传输系统
针对大气和水域的主要污染物,选用pH电极、电导电极、PM2.5传感器、SO2传感器、温度传感器,对环境数据进行采集,数据采集系统对所得数据进行整合,并通过LoRa通信的方式实现数据的远程传输。
数据采集系统选用STM32F103C8T6作为主控芯片,芯片包含I2C、SPI、串口、ADC、IO等多种资源,能够满足与各类传感器进行通信的需求。数据采集系统从飞控获取5 V电源进行供电,将所得的各类传感器数据打包为数据帧,通过串口传输至LoRa模块,完成数据的无线传输。
pH测量模块选用雷磁E-201-C电极,pH测量范围为0~14,工作温度范围为5~60 ℃。设计电压跟随器电路,提升电源带负载能力,在pH电极负极输入1.7 V正基准电压。利用电压负反馈电路,放大pH电极正极电压信号,使用微处理器ADC读取输出电压信号,即可转换为对应的pH值[12]。由于电位差受温度影响较大,选用DS18B20传感器读取温度数据,对采集的pH数据进行校正。测量电路如图3所示,其中pH-接pH电极的负极,pH+接pH电极的正极,pHout为pH测量电路的输出。
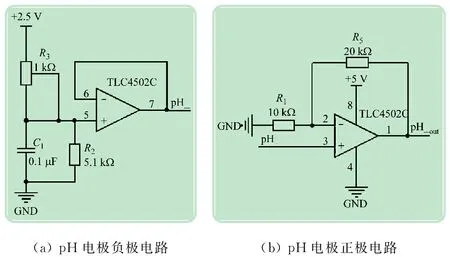
图3 pH值测量电路
PM2.5的测量选用GP2Y1014AU光学灰尘传感器。数据采集系统控制二极管发射出光线,其中部分光线经空气中PM2.5反射后,被光电晶体管接收,转换为电压信号,供数据采集系统ADC读取,得到对应的PM2.5浓度[13]。测量原理如图4所示。

图4 PM2.5浓度测量原理
同时,系统搭载标准E53拓展接口,通过外扩红外SO2模组和电导电极完成对大气SO2浓度和水域电导率的测量。
数据采集系统完成环境数据采集后,通过串口传输至基于扩频技术的M-HL9无线透传LoRa通信模块,实现无线传输。其支持频率为470~510 MHz,最大发射功率20 dBm,工作电压DC3.3~5 V,通信距离3 km,传输速率50~800 Kb/s,工作温度-40~85 ℃。监测过程中,当环境信号较差、传输距离较远时,无人机数据采集系统可与预设子节点组网,形成级联组网的形式。预设子节点将传感器的数据集成到一起,经级联网络上传至地面站。地面站负责无线网络指令的下达、数据的接收、系统的检测以及管理等功能。组网示例如图5所示。

图5 远距离LoRa组网
3 系统软件设计
3.1 环境监测巡航控制系统
飞行控制系统工作在定时器调度模式,并对各外设模块的中断优先级进行合理的设计。在主函数main.c 的设计中,主循环While(1)中的非实时函数,例如按键扫描、加速度计标定、遥控器行程标定、显示屏刷新等操作,对周期性要求不高,利用中断空闲时间执行。对周期性要求较高的实时函数,例如姿态解算、惯性导航、数据采集等则采用定时器中断来实现多任务调度,保障了程序运行的实时性与稳定性。
无人机巡航任务主要由GPS导航系统进行控制,采用SINS-2fGPS最优组合导航系统,使基于十轴传感器数据的惯导与GPS导航进行数据融合,实现两者性能互补。通过位置+速度双观测量卡尔曼滤波,进行精确定位与定点飞行。具体步骤为:地面站发送目标点地理位置信息,由2.4G数据传输模块进行传输,飞控经解析得出目标经纬度等信息,与当前机载GPS模块经纬度比较得出位置偏差,若位置偏差不超限,则进行目标点的定点飞行,利用PID进行修正,使位置偏差趋近于零;若位置偏差超限,无人机则向地面站返回超限错误信息,并且不执行此项目标点的飞行任务,请求控制端重新发送合适位置信息。通过不断更新规定航线与实际位置的偏差,进行运动反馈闭环控制,从而精确定位。
无人机的高度控制采用双闭环PID控制策略[14-16]。外环为高度环,内环为高度方向z轴的加速度环。具体控制思路见图6所示。
3.2 基于Qt的环境指标研判
系统人机交互界面采用Qt Creator进行开发,将接收到的来自数据采集系统的传感器数据实时显示,以供研究人员对环境质量进行研究与判断。通过Qt的QSerialPort组件完成数据帧的接收。提取数据帧中的帧头帧尾与校验位,对接收数据的有效性进行校验。校验通过后,依次按位提取出数据帧中PM2.5浓度、pH值等传感器的有效信息,将解析完成的传感器数据显示到交互界面中,进行实时显示。系统交互界面如图7所示。

图6 无人机高度控制示意图

图7 环境研判系统及实时回传数据显示
4 测试结果与分析
为验证系统的各项功能,将两栖无人机投放于人工湖、高空、近海等场景执行实地环境监测任务。监测飞行过程中有强风扰动、小型外物干扰时,无人机会在短暂时间内失去平衡状态,此时飞行控制系统进行实时姿态解算,依靠飞控系统内部算法能及时恢复平稳飞行状态,按照计划航线继续行进。
执行大气、水域监测任务时,无人机按照GPS定位数据抵达规定区域点,然后执行自主降落程序,利用浮漂结构平稳降落到水面上进行水域污染物指标的监测与数据实时回传。任务完成后自主起飞,抵达指定空域后进行空域污染物指标的实时监测与数据实时回传。所有任务点监测完毕后按照规定航线安全返回。图8为无人机在近海海面上执行监测任务的实景,图9为无人机在近海上空执行监测任务的实景。

5 结 语
本文充分发挥无人机灵活机动、不受空间地形限制的优势,结合两栖结构设计,可自主完成大气、水域质量的一体化监测;搭载LoRa通信模块,降低了数据传输功耗,在传输距离较远时,通过设立中间子节点,以增大传输距离。通过实地测试表明,飞控算法稳定性强,能够完成恶劣环境下的自主监测任务,数据回传的实时性与准确性高,可实现低成本、高效率的广域环境质量监测。但受限于无人机的续航能力,该设计更多用于即时环境测量。
猜你喜欢
数学物理学报(2021年1期)2021-03-29 03:14:38
家庭影院技术(2020年12期)2021-01-18 03:26:52
电子制作(2019年19期)2019-11-23 08:41:54
电子制作(2018年18期)2018-11-14 01:48:00
中国资源综合利用(2017年4期)2018-01-22 02:46:51
家庭影院技术(2017年12期)2017-02-06 02:32:16
公民与法治(2016年4期)2016-05-17 04:09:15
中国资源综合利用(2016年4期)2016-01-22 08:27:22
中国资源综合利用(2016年12期)2016-01-22 02:02:27
广州大学学报(自然科学版)(2015年4期)2015-12-23 11:50:10