基于Android 的基坑变形自动化监测软件设计与实现
2022-08-02 07:01郑晖,付凯
地理空间信息 2022年7期
郑 晖,付 凯
(1. 武汉市勘察设计有限公司,湖北 武汉 430022)
城市基坑开挖具有施工风险高、难度大等特点。随着大型城市土地供求关系的日趋紧张,大型建(构)筑物都开始向上和向下拓展空间,因此基坑工程的开挖也越来越深。为保障基坑施工安全,对基坑监测提出了更高的要求。地下土体性质不明、荷载条件复杂、施工环境各异等不确定因素均对基坑施工安全构成威胁,因此基坑变形监测已成为确保基坑施工安全必不可少的重要环节。基坑监测通常采用测量机器人对监测点的水平和垂直位移进行监测,需要在作业现场通过数据线连接PC 和全站仪或测量机器人,然后使用PC 中的软件将测量仪器上的监测数据下载到计算机,最后进行内业处理[1-2]。一方面,监测人员不仅需面对复杂的基坑工程现场施工环境,还需携带笨重的笔记本电脑和冗长的数据线,无形中增加了基坑变形监测作业的风险;另一方面,实际工作中一般需部署多台测量设备才能覆盖整个基坑变形监测范围,这就使得监测人员需在多个观测站之间重复下载各测站的监测数据,在PC 和测量仪器上频繁插拔数据线,将在一定程度上降低仪器和线缆接口的使用寿命[3]。
目前搭载Android 操作系统的智能手机普遍内置了蓝牙模块。蓝牙传输技术具有灵活、方便、快捷的特点,已在各行业得到广泛应用[4-7]。本文拟基于轻便的Android 智能手机、无线蓝牙通信技术和网络通信技术开发基坑变形监测数据自动采集软件。通过该软件操作测量机器人实现基坑变形监测数据的自动采集、解析和存储,实现测量仪器与后台服务器的通信,实时获取仪器测量信息和服务端测量信息,实时计算和检核,以保证监测的即时性;同时采用便携的Android 设备完成基坑巡检和工况录入,为基坑变形监测提供丰富的信息。
1 变形监测软件数据通信链路
根据与Android 设备连接的硬件不同,可将变形监测软件的数据通信链路分为3 个部分(图1):An⁃droid 设备与测量机器人的通信链路、Android 设备与服务器端的通信链路和Android 设备与其他移动终端协同的通信链路。这3 条通信链路相互协作,实现了基坑变形监测的内外业一体化作业,可提高基坑变形监测的便捷性、准确性、及时性和规范性。

图1 基于Android系统的自动化监测软件数据通信框架
1.1 Android设备与测量机器人的通信链路
为了解决传统基坑监测外业观测与内业处理脱节导致的监测成果准确性和实时性降低的问题,同时考虑传输距离、功耗、硬件成本等因素,软件采用蓝牙作为测量机器人与Android 设备的通信纽带。若测量机器人未内置蓝牙模块,可外接蓝牙适配器完成仪器RS232串口到蓝牙的转换,进而建立仪器与Android设备的蓝牙通信。建立蓝牙数据链路后,Android 设备可通过蓝牙调用GeoCOM 接口向测量仪器发送ASCII指令[8];测量机器人可自动获取仪器信息、配置度盘和控制仪器观测[9]。在完成初始学习后,正式观测时测量机器人将请求的信息、配置结果、观测结果返回给An⁃droid设备[10]。获取仪器观测数据后,软件将自动记录并实时处理监测数据;再将监测结果与测量规范进行比对,若闭合差等检核量超限,设备将自动重测测点/测回;最后软件将监测点本期监测结果与往期数据进行比对,若发现本次变形或累计变形超过预定阈值,则将视预警级别的不同向特定用户发送预警信息[11]。Android设备与测量机器人的通信链路如图2所示。
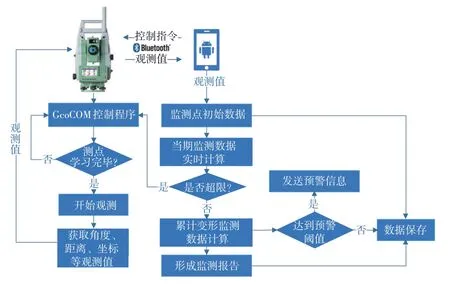
图2 Android设备与测量机器人的通信链路
1.2 Android设备与服务器端的通信链路
通常采用XML 或JSON 文件格式进行数据交互,以实现Android移动端设备与服务器端的通信[12]。根据交互内容的不同,软件将通信内容分为3 种:①初始化监测配置,移动端在选定监测项目后,将项目编号发送到服务器端,服务器端向移动端反馈该项目编号监测的配置信息,如监测对象、测项、测点等;②监测方案配置,在正式开始监测前,移动端需向服务器端请求具体的监测方案,服务器端将具体的监测方法、使用规范、权限参数以及预警阈值等反馈给移动端,以便指导移动端实施具体的监测;③触发定期任务,服务器端根据预设流程,定期将计划任务下达到移动端,移动端收到任务后,开展定期巡检并记录工况,再将记录上传至服务器端。Android 设备与服务器端的通信链路如图3所示。
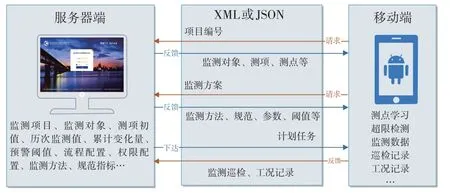
图3 Android设备与服务器端的通信链路
1.3 Android设备与其他移动终端协同的通信链路
Android 设备获取到测量机器人的观测数据后,可通过互联网将监测数据上传至服务器,其他An⁃droid或iOS移动终端可从服务器上下载当前项目的观测数据。这些移动终端可用于外业人员绘制草图、观测数据核查和反馈、基坑巡检或工况记录等工作,工作内容全部在移动端完成并采用流程表单管控,从而使内业数据处理和数据质检更加科学规范。
2 软件技术路线
2.1 软件架构设计
软件整体采用模型—视图—控制器的架构进行设计。模型层存储基本数据,实现业务逻辑处理对象的属性定义和操作,为控制层提供数据和操作支撑,如数据库存取操作、网络操作、采集方式、采集方法、数据格式解析、耗时的任务等可重用的组件和功能模型;视图层作为人机交互的界面,负责加载模型层的数据结果,显示视图层的绘制以及响应用户的输入;控制器层接收用户在视图层的输入,并调用模型和视图去完成用户的请求。控制器作为联系模型和视图的纽带,本身不输出任何内容,其主要用来管理模型层与视图层之间的数据传递,同时响应由视图层触发的各种事件[13]。
2.2 蓝牙通信管理
蓝牙技术是一种基于低成本的近距离无线链接技术,可为固定和移动设备建立无线通信渠道,从而使数据传输变得更加迅速高效。手机蓝牙模块的通信距离一般在15 m 以内。Android 平台的蓝牙模块是基于BlueZ 协议栈实现的,该协议栈的底层协议层包括逻辑链路控制和适配协议(L2CAP)、服务发现协议(SDP)、电缆替代协议(RFCOMM)[14-15]等众多协议。Android 的底层开发框架为开发者提供了操作蓝牙功能的各类API,应用程序通过调用相应的API 即可连接其他蓝牙设备,通过无线通信来操控蓝牙设备。软件基于Android Studio 3.5 集成开发环境,采用Java 语言开发。按照蓝牙设备搜索、发现蓝牙设备、建立蓝牙链接、蓝牙数据交互、关闭蓝牙链接的流程实现Android设备与测量机器人的交互。
2.3 监测方案配置化管理
由于基坑安全等级要求的不同,各类基坑监测所需的监测内容各不相同。为了适应各类监测应用场景,系统预定义了与基坑监测有关的所有测项(图4)、监测方法、监测频率、报告模板、消息模板等,用户按需从配置项中勾选符合应用场景的监测参数并保存,Andorid 移动端会向服务器请求并同步选定监测项目的监测方案配置化信息,方便外业作业人员开展实际监测工作。

图4 基坑监测的测项配置勾选内容
3 软件功能模块
基坑变形自动化监测软件根据基坑工程现场变形监测需求,设计并实现了项目管理、数据采集、数据分析、监测巡检、工况录入5个功能模块。
3.1 项目管理模块
用户打开Android 终端上安装的基坑监测软件后,默认以列表的形式展示该用户参与的所有基坑监测项目(图5a),为了方便用户掌握项目的大致位置,可切换到项目的地图浏览模式(图5b)。用户选定待监测的基坑项目后,系统会读取服务器中预设的该监测项目所有的监测对象,点击监测对象后,将显示为该监测对象配置的各种监测项。

图5 基坑监测项目列表和地图浏览模式
3.2 数据采集模块
用户选择基坑监测项后,再选择该监测项实际监测作业采用的测量机器人型号。软件支持本地文件、U 盘文件、仪器文件3 种监测数据来源,选择对应的文件后,软件会按照各仪器厂商的数据编码结构对数据进行解码。解码后的数据以直观形象的表格形式进行展示(图6a),确认数据以及各项参数设置正确后,可将数据上传至服务器(图6b)。
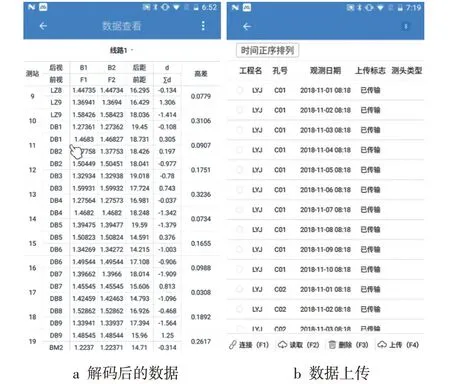
图6 观测数据解析与上传
3.3 数据分析模块
测量机器人在完成初始学习后,会按照预设的流程自动进行观测。当观测数据累积到可进行监测指标计算后,软件立即对可检核的误差指标进行计算,如距离较差、半测回归零差、一测回2C 值与互差、各测回的较差等,若指标超限,软件将记录超限指标日志,并自动进行重测或加测。每一测回完成后都将计算一次测点坐标,并与观测点的初值和上期坐标进行对比,计算两期数据周期的变形量和变形速率,若指标超限,将立刻发送预警信息至服务器,由内业作业人员核实预警信息,核实无误后再将预警信息以短信、微信、邮件等形式推送给需接收预警信息的用户。
3.4 监测巡检模块
每个基坑监测项目都会定期进行变形监测,这种监测主要针对容易产生变形的监测点,监测数据也只能准确反映监测点的变形情况。为了确保基坑结构安全,软件提供了巡检功能,可按照基坑的安全等级设定巡检的频次。到了设定的时间,软件会自动发起巡检(图7a)。外业作业人员可根据设定的巡检项清单对基坑结构进行全方位的巡检,并按实际巡检结果如实填写巡检记录,若巡检过程中发现异常项可通过文字、图片、视频记录安全隐患,所有巡检记录将统一上传至服务器存档(图7b)。

图7 基坑巡检和工况记录
3.5 工况录入模块
由于基坑支护结构建立后,施工单位会在基坑中连续挖土,导致基坑支护结构所受荷载频繁变化,如果施工方法或工艺选择不当,将影响基坑支护结构的安全性,因此施工工况也属于基坑监测的重要组成部分。软件提供了工况记录功能,监测人员可利用软件以文字、图片、视频的方式对基坑施工各阶段的工况进行记录,所有工况信息将上传至服务器,便于后期进行工况回溯。
4 结 语
作为基坑工程施工中的一个重要环节,基坑监测需采用各种监测手段对基坑的岩土性状、支护结构变形和周围环境条件变化情况进行持续的记录和分析,并及时反馈监测结果,确保基坑施工安全。本文设计了一套基于Android 设备的基坑变形自动化监测软件,实现了基坑监测数据的自动采集、检核和存储,便于内业开展基坑变形情况分析,实时上报基坑工程巡检和工况记录,让监测者和管理者能及时了解基坑的安全情况。实际应用效果表明,该软件将施工现场测量机器人观测的信息与服务器端工程信息综合在一起,提升了监测作业效率,确保了监测数据的准确性和完整性,可满足当前基坑变形监测便捷、准确、及时、规范的工作要求。
猜你喜欢
工业设计(2022年7期)2022-08-12
移动通信(2021年5期)2021-10-25
数码世界(2020年11期)2020-11-23
空间科学学报(2020年3期)2020-07-24
电子制作(2019年20期)2019-12-04
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
科技创新导报(2016年27期)2017-03-14
网络空间安全(2016年11期)2017-02-13
软件导刊(2016年11期)2016-12-22