机载激光雷达对线路工程施工质量的智能检测
2022-08-02 07:01陈永洪谢榕昌蔡振华曾深明吴荣基
地理空间信息 2022年7期
陈永洪,谢榕昌,蔡振华*,曾深明,吴荣基
(1. 广东电网有限责任公司,广东 广州 510620;2. 广东电网有限责任公司阳江供电局,广东 阳江 529500)
输电线路工程验收是保障电力系统质量的重要环节,对于电网的可靠、稳定和安全具有重要意义。验收的工作效率和水平直接影响工程能否按进度投产以及运行单位巡检维护该项目的成本[1-4]。耐张塔和软跳线是架空输电线路系统的重要组成部分,耐张塔预偏值以及软跳线安装质量检测是输电线路工程验收中的一项重要内容。
传统验收主要采用地面测量的方法,成果精度高,但劳动强度大、效率低、依赖于人员经验、登高作业安全风险高。随着技术的发展,直升机验收的方式被广泛应用。该方式不受地面通行条件限制、作业效率高、作业半径大、人员劳动强度相对较小、避免了人员经验差异带来的粗差,但载人直升机方式的飞行成本仍相对较高,且存在飞行安全风险。无人机遥感具有安全性高、成本低、机动灵活、工作效率高等优势,近年来发展迅速[5-6],被广泛应用于输电线路工程的验收和巡检中[7]。目前采用的机型主要包括无人直升机、固定翼无人机和旋翼无人机等,载荷以光学相机为主。激光雷达(LiDAR)是集成了激光扫描仪、全球导航卫星系统、惯性测量单元、高速率存储设备和计算机的一体化现代先进空间测量系统,具有测距精度高的特点,可在输电线路工程验收中发挥重要作用[8-12]。本文研究了基于LiDAR 的耐张塔预偏值和软跳线安装质量智能检测技术,并以广东省云浮市西南500 kV 架空输电线路验收为例,介绍了无人机LiDAR在耐张塔预偏值和软跳线安装质量智能检测中的应用,可为相关研究工作提供参考。
1 技术方法
1.1 无人机LiDAR数据采集
在传统基于无人机LiDAR 的输电线路巡检或工程验收中,无人机只飞行一遍;而为了保障线路和无人机系统的安全,在考虑无人机悬停精度和GPS定位误差的条件下,无人机离输电线路的水平和垂直距离均较大,这样将导致获取的激光点云密度和影像分辨率受限。
鉴于此,本文利用基于RTK的无人机搭载LiDAR进行耐张塔预偏值和软跳线安装质量智能检测的数据采集。其主要步骤为:①利用无人机搭载LiDAR 设备,以等高的方式飞行,获取线路走廊内的高精度三维点云;②利用自动/半自动算法提取耐张塔、导线等关键地物以及三维地形信息;③利用提取的地物和地形信息进行复杂的三维航迹规划,自动选定耐张塔本体精细化验收的拍照点;④依据规划的三维飞行航迹,在RTK厘米级定位精度信号的支持下,进行自主的贴近飞行,获取更高密度、更高精度的激光点云数据;⑤基于高密度、高精度激光点云数据,进行耐张塔预偏值和软跳线安装质量智能检测。
1.2 激光点云数据自动/半自动分类
对于耐张塔预偏值和软跳线安装质量检测而言,最关注的地物为杆塔本体和软跳线点云。然而,一次飞行任务获取的输电线走廊原始点云数据包括扫描范围内所有地物目标的三维空间信息,数据量庞大,且必然包含大量的噪声点,实际应用中需剔除这些噪声点,并将不同类型的地物要素分类。点云数据处理(去噪、分类等)是走廊三维重建、安全距离分析等应用的基础,是点云数据自动化处理研究的核心与难点,更是目前机载点云内业处理中最费时费力的环节。激光点云数据自动/半自动分类流程如图1所示。
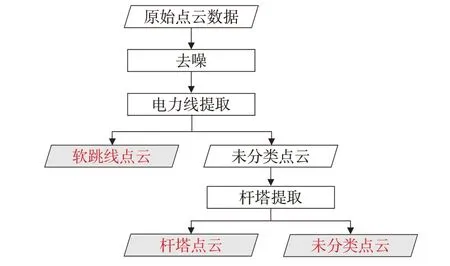
图1 电力走廊点云分类流程图
1.3 基于LiDAR的耐张塔预偏值检测
基于杆塔激光点云,在塔身部分拖动生成一个上矩形面,取上矩形面与塔身主材相交的4个顶点(相同高度ht),其坐标分别为(X1t,Y1t,ht)、(X2t,Y2t,ht)、(X3t,Y3t,ht)、(X4t,Y4t,ht);再根据式(1)计算4 个点构成的矩形中心点T的坐标(Xot,Yot,Zot)。
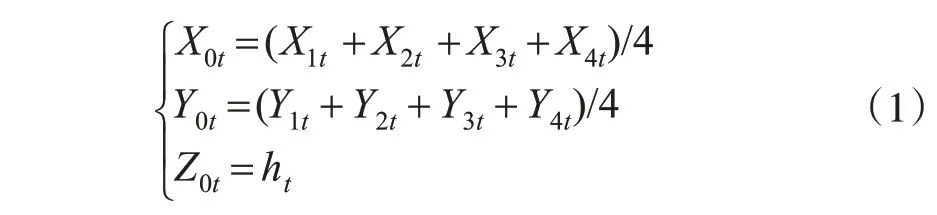
在塔基部分拖动生成一个下矩形面,取下矩形面与塔身主材相交的4 个顶点(相同高度hb),其坐标分别为(X1b,Y1b,hb)、(X2b,Y2b,hb)、(X3b,Y3b,hb)、(X4b,Y4b,hb);再利用式(1)计算4 个点构成的矩形中心点B的坐标(Xob,Yob,Zob)。
将点T投影到下矩形面,其投影点为P,坐标为(Xp,Yp,Zp),Zp=hb;连接T、B、P三个点构成一个直角三角形,再根据勾股定理计算得到倾斜度、投影面夹角和水平偏移距离。传统人工检测方法只能检测耐张塔预偏角度,本文方法可同时检测预偏角度、距离和方向,极大地提高了耐张塔预偏值检测的效率和准确率。
1.4 基于LiDAR的软跳线安装质量检查
软跳线安装质量检查的具体步骤为:①对激光点云进行分类,把软跳线单独分成一类,与杆塔本体区分开,分类方法同§1.2节;②根据杆塔的坐标和软跳线的点云高度,将软跳线分为左上相、左中相、左下相、右上相、右中相和右下相;③分别计算各相软跳线点云与杆塔本体点云的空间距离,判断是否小于安全距离阈值,改变小于安全距离阈值的点云颜色;④生成正视图、侧视图,从不同角度查看不符合安全距离的软跳线点云情况,进一步评估该软跳线是否存在安全隐患,若小于安全距离阈值的点云数量多于10 个,则判定该软跳线安装质量可能存在隐患;⑤生成软跳线质量检测报告。
2 实验结果与分析
2.1 实验区概况
本文选取的实验区为广东省云浮市西南;地势西南高、东北低;主要地貌为丘陵,多沿山地边缘发育,高丘陵海拔为250~450 m,低丘陵海拔为100~250 m,低丘陵坡度平缓,多为15~20°。本次测试为500 kV架空输电线路,平均塔高约为70 m。测区线路如图2所示。

图2 测区线路图
2.2 无人机遥感系统
本文采用大疆M600飞行平台和QLiDAR-H200H1C载荷获取实验数据。M600是DJI为专业级影视航拍以及行业应用领域打造的全新一体化飞行平台,集成了新一代精准可靠的A3飞行控制系统和Lightbridge 2高清数字图传,支持高精度D-RTK GNSS 与地面站系统,采用模块化设计,提供最大6.0 kg 的有效载重。M600 不仅适配DJI 禅思系列云台,还全面支持“如影”Ronin-MX和DJI无线跟焦器;挂载各类微单、单反、甚至RED Epic 电影摄像机时,摄影师可远程调节镜头的焦点和光圈。QLiDAR-H200H1C 是一款无人机机载点云影像一体化数据采集系统,集成了有效测距200 m 的25 线激光扫描仪,平均点密度优于200点/m2(@100 m高度@10 m/s),保证了场景适用性和高点密度;集成了2 400 万像素的APS-C 数字相机;集成了APPLANIX APX15惯导系统,保证了使用稳定性和数据精度;拥有自主研发的智能控制系统,保证了系统的易用性,如表1所示。
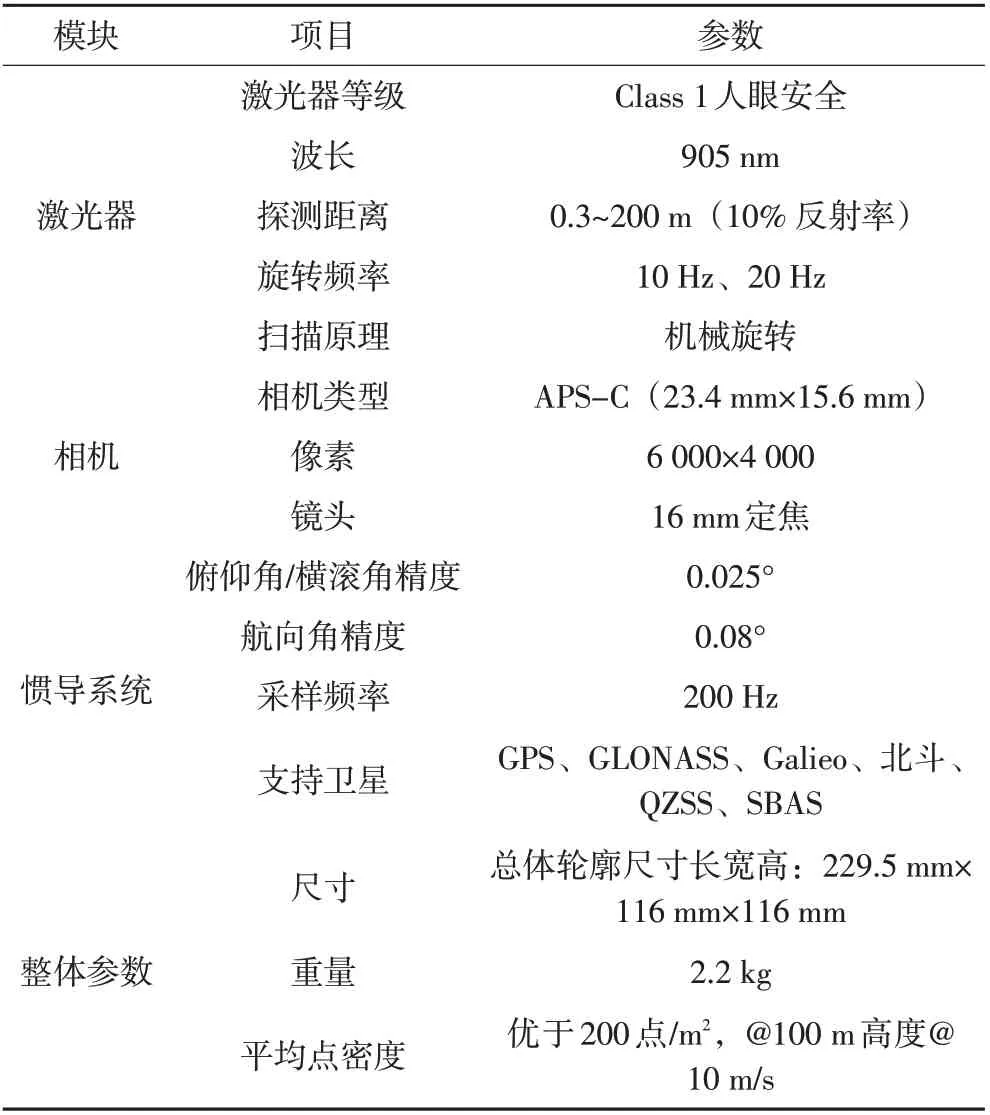
表1 QLiDAR-H200H1C无人机LiDAR系统的主要参数
2.3 结果分析
2.3.1 线路走廊高精度三维点云数据
第一次飞行的相对航高为120 m,飞行速度为10 m/s,旋转频率为10 Hz,点云密度为286 点/m2。采用配套的数据处理软件生成线路走廊的高精度三维点云;再利用人工智能算法自动提取杆塔、导线等关键地物和三维地形信息;然后利用这些信息进行三维航迹规划(图3),并自动选定耐张塔本体精细化验收的拍照点(图4)。依据规划的三维飞行航迹,在RTK厘米级定位精度信号的支持下进行第二次自主贴近飞行,相对航高为100 m,飞行速度为10 m/s,旋转频率为10 Hz,点云密度为343 点/m2,从而获取更高密度、更高精度的点云数据(图5)。

图3 航迹规划示意图
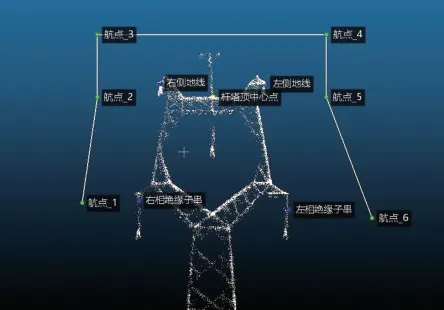
图4 拍照点位置示意图
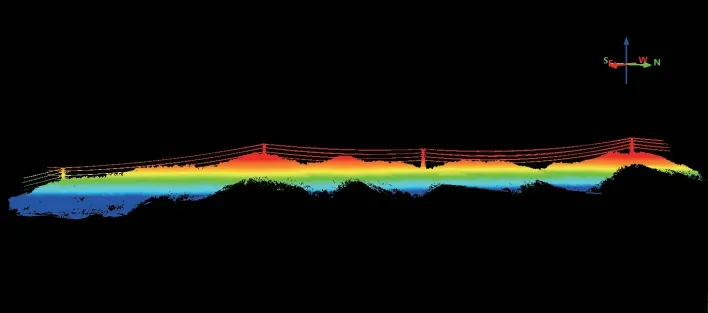
图5 高精度三维点云数据
2.3.2 LiDAR点云的分类结果
根据LiDAR 点云数据自动/半自动分类算法,对贴近飞行获取的高精度三维点云数据进行分类,从而划分为杆塔、软跳线、导线、地线、绝缘子等类型,如图6所示。
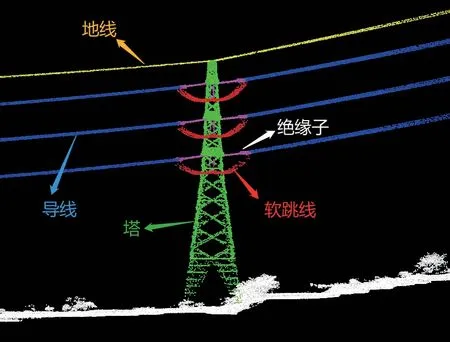
图6 点云分类结果
2.3.3 耐张塔预偏值智能检测
利用无人机LiDAR采集的高精度点云数据开展耐张塔预偏值智能检测,检测主要界面如图7 所示,可实现塔高、倾斜距离、倾斜角、倾斜度等多个指标的检测。检测结果如图8 所示,提高了检测准确率和效率,减轻了工作人员负担,为耐张塔验收提供了一种有效的技术支撑。
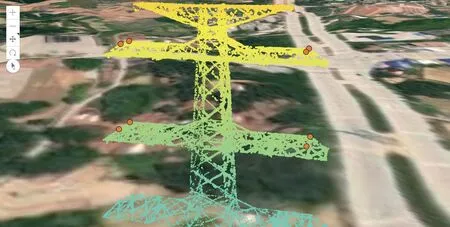
图7 耐张塔预偏值检测

图8 耐张塔预偏值检测结果
2.3.4 软跳线安装质量智能检测
利用无人机LiDAR采集的高精度点云数据开展软跳线安装质量智能检测,检测主要界面如图9 所示,可实现电气间隙安全距离的检测,为软跳线安装质量验收提供了快速方法。另外,针对软跳线进行距离分析对点云数据的密度要求较高,采用本文提出的数据采集模式可满足软跳线安装质量检查对点云密度的要求。软跳线安全距离检测结果如图10所示。

图9 软跳线安装质量检测界面
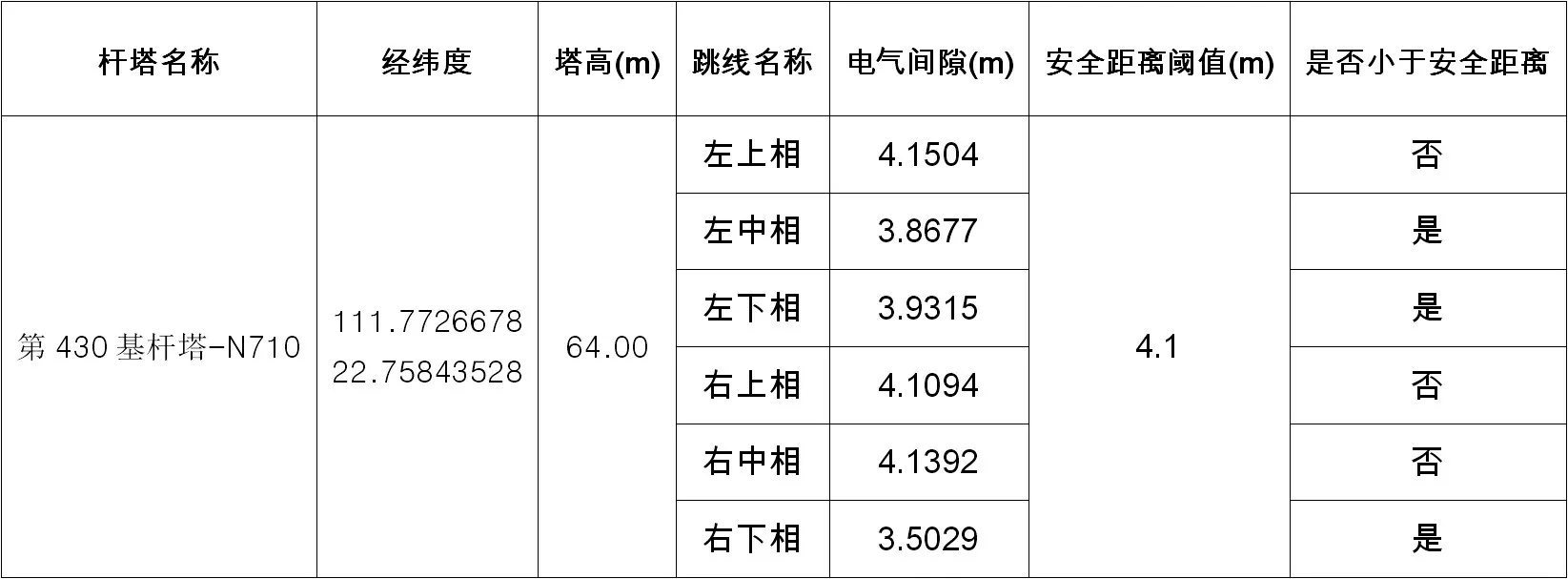
图10 软跳线安全距离检测结果
3 结 语
本文针对输电线路工程验收中耐张塔预偏值和软跳线安装质量智能检测需求,提出了一种基于无人机LiDAR的杆塔安装质量检查技术。该技术要求进行两次无人机飞行,第一次以等高方式飞行,获取线路走廊内的高精度三维点云,再利用人工智能算法自动提取杆塔、导线等关键地物和三维地形信息,进行复杂的三维航迹规划,并自动选定杆塔本体精细化验收的拍照点;第二次飞行依据规划的三维飞行航迹,在RTK厘米级定位精度信号的支持下进行自主贴近飞行,从而获取更高密度、更高精度的点云数据。在此基础上,进行激光点云数据的自动/半自动分类和杆塔模型重建,用于耐张塔预偏值和软跳线安装质量检测。通过广东省云浮市进行实验验证,证明了该方法的可行性和有效性,可满足智能化验收工作的要求。
猜你喜欢
卫星应用(2022年1期)2022-03-09
哈尔滨工业大学学报(2021年10期)2021-09-25
四川电力技术(2020年1期)2020-03-31
电子制作(2019年11期)2019-07-04
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
商品与质量(2018年45期)2018-04-15
北京航空航天大学学报(2017年9期)2017-12-18
电子制作(2016年21期)2016-05-17