基于构建等效子集的观测系统变换
2022-08-02 07:36王梅生储仿东张洪涛高子涵
石油地球物理勘探 2022年4期
张 华 王梅生 吴 克 储仿东 张洪涛 高子涵
(①东方地球物理公司采集技术中心,河北涿州 072751;②东方地球物理公司新兴物探开发处,河北涿州 072751)
0 引言
随着地震勘探技术的发展,“两宽一高”地震观测系统采集道数越来越多。目前,陆上地震采集的观测道数呈现跨越式增长态势,在中国已达到5.0×104道/炮的量级,国际上已开始采用超过1.0×105道/炮量级的地震采集[1],这样对地震采集装备资源的需求快速增长,使得地震采集成本日趋增高,采集施工难度越来越大。与此同时,海底节点(电缆)采集能获得宽方位、宽频、高信噪比、高保真地震数据,尤其随着深海油气勘探力度的不断加大,海底节点采集将得到越来越广泛的应用[2-3]。但海底节点数据采集具有成本高,即投放难、回收难,需要二次定位等特点,使得“两宽一高”地震采集技术在海域的推广应用,可能面临比陆上更突出的地震数据采集设备不足问题。陆上可控震源激发和海上气枪激发均具有成本低、可重复激发的特点,“以炮代道”观测系统变换(变观)技术对解决宽方位、高密度观测系统的地震采集设备不足、减少海上地震采集设备工作量提供了思路,为“两宽一高”地震勘探技术的推广拓展了空间。
近年来,陆上和海上不同的地震探区尝试了各种以炮代道的变观方式,实施地震数据采集,并以不同形式展示了各自的勘探成果。
袁全社等[4]对北部湾盆地WS区的正交束状观测系统和片状观测系统进行对比分析,认为片状观测系统优于正交束状观测系统。张金淼[5]在渤海某靶区开展了正交宽方位观测系统与Patch 宽方位观测系统对比,认为正交束状的宽方位观测系统方案明显优于 Patch宽方位观测系统。何进勇等[6]对比了复合观测系统与Patch观测系统,通过属性分析认为复合宽方位观测系统在观测系统属性、面元属性和照明效果上都优于Patch观测系统。
张慕刚等[7]提出将常规观测系统分别转化为横向推拉式、纵向推拉式、纵横向联合推拉式三种观测系统,以便减轻高效地震采集模式下接收设备的压力,并可大幅度地提高施工效率。张怀[8]在保证横向最大炮检距一致的前提下,提出了炮点分别重复2倍、3倍、4倍的三种横向推拉式观测系统。吴安楚等[9]在中东大沙漠区将常规三维观测系统改进为横向推拉式的观测系统,方便震源在远排列进行交替或滑动扫描施工,提高了施工效率,并且节省一半采集设备。
龚旭东等[10]充分利用纵向大十字技术,成功将陆上宽方位排列片推广到海上地震采集,相比常规海上拖缆地震采集,增加了横向信息和采集方位,提高了复杂地质体照明度。柳兴刚等[11]在苏丹复杂区采用大十字观测系统代替常规高密度宽方位观测系统,在有限地震采集设备条件下,成功实施了高密度、宽方位地震采集。
冯凯等[12]将陆上观测系统排列片横向宽度转换为炮线长度,炮线长度转换为排列片宽度,从而实现陆上束状观测系统向海洋观测系统过渡。李海军等[13]则将气枪ISS高效作业模式成功地应用于平行观测系统。
以炮代道变观技术在不同的地震勘探阶段,为解决地震采集项目难题发挥着重要作用,也基本满足了项目技术需求。但早期的以炮代道地震采集观测系统,尤其是海上采用的以炮代道观测系统,较少考虑观测系统等价变换,观测系统分析也很少做资料分选处理,导致不同地区观测系统类型对比差异较大,面元属性差,勘探精度低。
21世纪以来,中国陆上油气勘探的重点迅速向复杂构造、地层岩性、碳酸盐岩和非常规储层等四个领域转移[1];海上油气勘探开发也面临从浅层向中深层、由构造油气藏向复杂岩性油气藏转移的新态势[5]。随着勘探难度的不断增大,对地震勘探采集技术的要求越来越高。观测系统方式近年来也发生了悄然变化,如海上多方位、全方位拖缆向海底节点(电缆)正交宽方位转变,陆上常规窄方位观测系统向高密度、宽方位观测系统转变,都在主动适应高精度勘探的要求。“两宽一高”地震勘探是高精度地震勘探的必然选择。高精度地震勘探对变观技术提出了更高要求。
以往文献虽提出了不同的变观方案和实践,但大多未做深入的变观分析。本文针对目前流行的正交观测系统变换进行研究分析,从技术需求出发,提出变观的设计目标和设计原则,分析了十字子集在变观中的关键作用,剖析了基本观测系统变换及其典型案例,提出了较系统的变观理论,对变观设计、分析和研究具有借鉴作用和现实意义。
1 设计目标及设计原则
基于炮道互换原理的变观评价标准分为两个层次。一是基本属性及特性评价,满足需求是变观设计的基础要求。观测系统的基本属性主要是基于叠加成像、构造解释需求等方面的属性,如覆盖次数、炮检距、照明能量等,若变观设计的基本属性不能满足需要,则变观设计毫无意义。二是基于精细勘探需求的特殊属性及评价,满足精细勘探的需求。“两宽一高”地震采集技术的推广,标志着地震勘探已全面进入精细勘探阶段,基于OVT处理、解释技术的发展和应用,对提高构造解释、裂缝预测、储层预测及流体检测等方面的精度发挥着越来越重要的作用。对于高精度勘探,在观测系统设计阶段就已考虑到高精度成像、岩性反演需求的采集参数,现场实施的变观设计须等价于原观测系统,以保证地震采集工程技术设计的勘探精度,完成既定的勘探目标和地质任务。
因此,高精度勘探的变观设计不仅要求覆盖次数、成像效果等一致,而且炮检距和对应的方位角要与原设计的观测系统完全一致。基于炮道互换原理的变观设计须符合以下两条原则:
(1)变观前、后满覆盖区域相同子区内,相应面元炮检矢量完全相同;
(2)变观后满覆盖区域相同子区内,相应面元炮检矢量完全包含原观测系统的炮检矢量,且能通过处理手段消除“多余”的炮检矢量。
为符合上述两项原则,一方面,观测系统变化前、后的炮点距与检波(接收)点距须保持一致,即面元一致性;另一方面,变化后观测系统应包含原观测系统所有纵、横向炮检距信息,也就是纵、横向炮检距的一致性。
2 十字子集的用途
一个正交三维地震采集的观测系统具有唯一的十字子集。Vermeer在《三维地震勘探设计》专著[14]中介绍了构建十字子集的方法,即确定一条检波(接收)线,再找出与该条检波线相关的全部炮点,这条检波线与对应的全部相关炮点线就构成了十字子集。十字子集在地震数据处理中发挥着重要作用。在十字排列基础上,根据纵、横向炮、检线距划分为不同的子区,每个子区具有大致相同的炮检距和方位角,形成一个OVT向量片;将不同十字子集相同位置关系的OVT向量片抽取出来,形成覆盖全区的单次覆盖数据体,即OVT道集[15-17]。OVT道集是三维地震资料OVT处理、解释的基础。
十字子集数据体体现了现场采集数据在纵、横向最高密度采样特性,有效波和相干噪声在十字子集域中采样最充分。若采集设计的炮、检点采样间隔能满足空间采样定理,则有效波和相干噪声特征最明显且容易识别。有效波在XYT三维域中为时间梯度小且平缓变化的双曲面,而线性干扰为时间梯度大且相对恒定的圆锥曲面(图1),两种曲面在相交处有相同的波至时间。有效波与线性干扰波的视速度和波数差异较大,地震数据从XYT域变换到KKF域,最易将其分开,这对信噪分离和线性噪声压制具有十分重要的意义。在计算机性能高速发展的现今,十字子集域去噪方法已经成为相干噪声压制的常规处理手段。薛超[18]和公亭等[19]分别在黄土塬和柴达木英雄岭地区的地震数据处理中运用了十字排列去噪技术,取得了良好的成像效果。
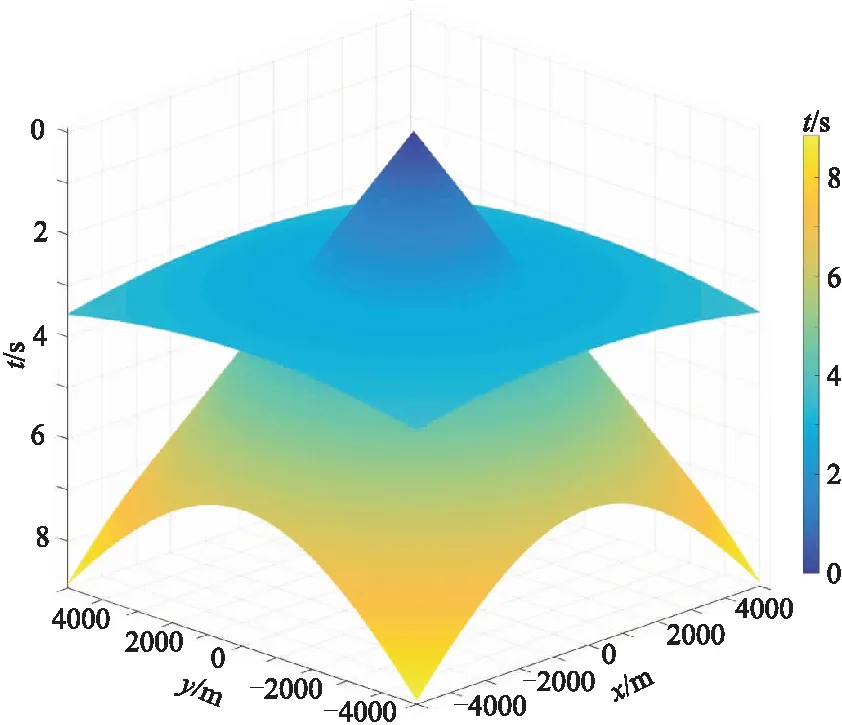
图1 十字子集域线性干扰与有效波时距曲面
十字子集排列,通过炮—道互换原理,可等效为“一个”炮点激发、四周布满检波点的共炮集数据。十字子集在变观中也发挥重要作用。
目前,陆上常规三维地震采集观测系统中炮点大多分布在最中间的两条检波线之间,本文将同一炮线的相邻检波线间的全部炮点称为一组炮。图2为陆上常规三维观测系统(4线×2炮×8道)的一个简单模型,其炮、道距为100m,炮、检线距为200m,一组炮包含两炮。由常规观测系统(图2)建立了十字子集排列(图3),该十字子集排列的炮、道距与常规三维观测系统相同。
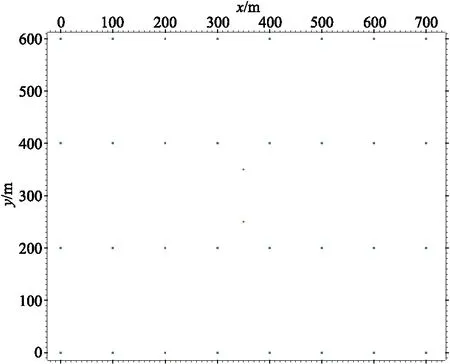
图2 陆上常规三维地震观测系统模型
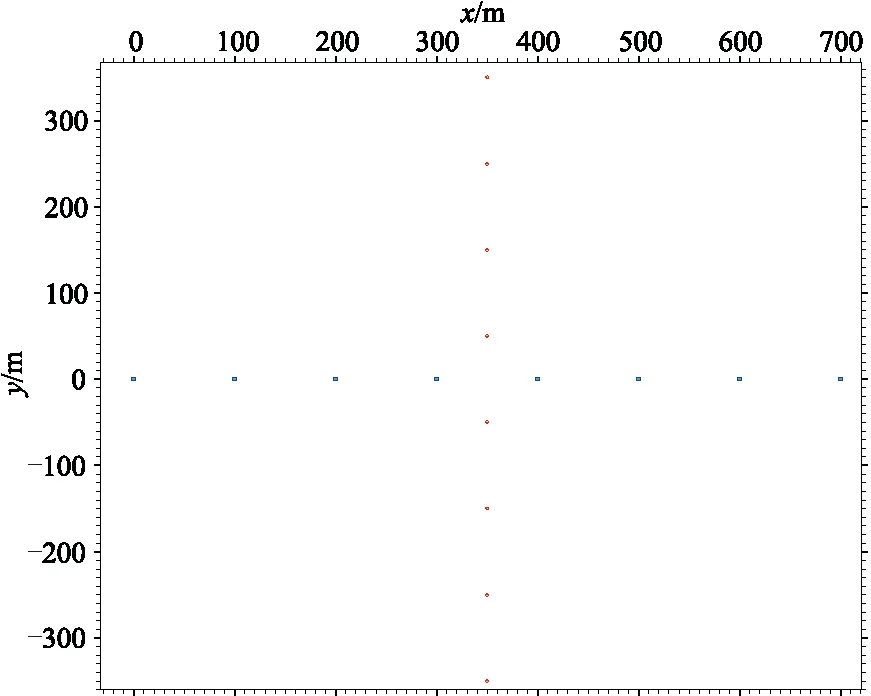
图3 十字子集排列
首先考察十字子集排列与原观测系统是否等价。若这两种观测系统对应面元的炮检距和方位角完全一致,就可认为这两种观测系统是等价的。
图4为由原观测系统分析得到的各面元上的一次炮检矢量分布(排列纵横向未滚动);图5为由构建的十字子集排列分析得到各面元的一次炮检矢量分布。两者一次覆盖的面元个数是相同的,但对应面元上的炮检距和方位角均不相同。
图4在垂直测线方向上随着面元由反射区中心位置向外移动,炮检距不是逐渐增大,而是呈跳跃变化;图5则无论是沿测线方向,还是垂直测线方向,随着面元由反射区中心向外移动过程中,炮检距都是逐渐增大,方位角也平缓变化。
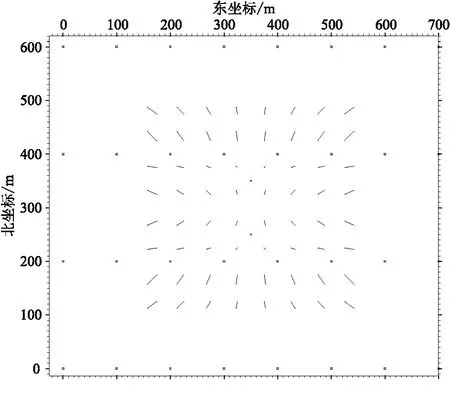
图4 常规三维地震观测系统模型一次炮检矢量分布
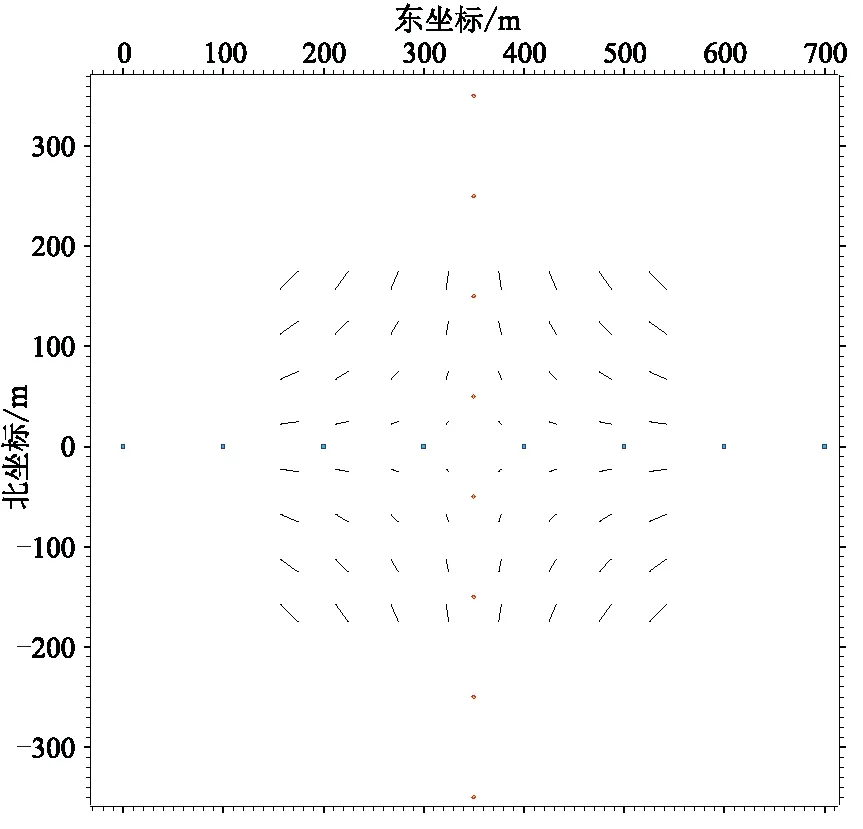
图5 十字子集排列一次炮检矢量分布
观测系统的对比分析,还可通过对其满覆盖区内相邻检波线与相邻炮线所围子区的炮检距与方位角的综合对比分析来实现。对于给定满覆盖区域的一个面元,作用于该面元每个“炮检对”称为一个炮检矢量,方向从炮点指向检波点,长度为炮点到检波点的距离;将所有有贡献于该面元的炮检矢量起点置于面元中心,就形成满覆盖区域的“蜘蛛图”。满覆盖区域每个子区内不同面元上的蜘蛛图都不相同,但不同子区对应面元位置的蜘蛛图是相同的。满覆盖区相同子区内对应面元位置的蜘蛛图相同与否可作为观测系统是否等价的判断指标。
图6、图7分别为原观测系统和构建十字子集排列纵、横向分别滚动4次后形成的满覆盖“蜘蛛”图(不同颜色表征不同覆盖次数)。可见两者同一子区内对应面元位置的“蜘蛛”图完全一致(炮检矢量对比数据见附表1)。也说明图4、图5炮检距矢量空间分布位置虽不同,但它们却包含相同的炮检距矢量数据,图5是图4炮检距矢量的空间重排。
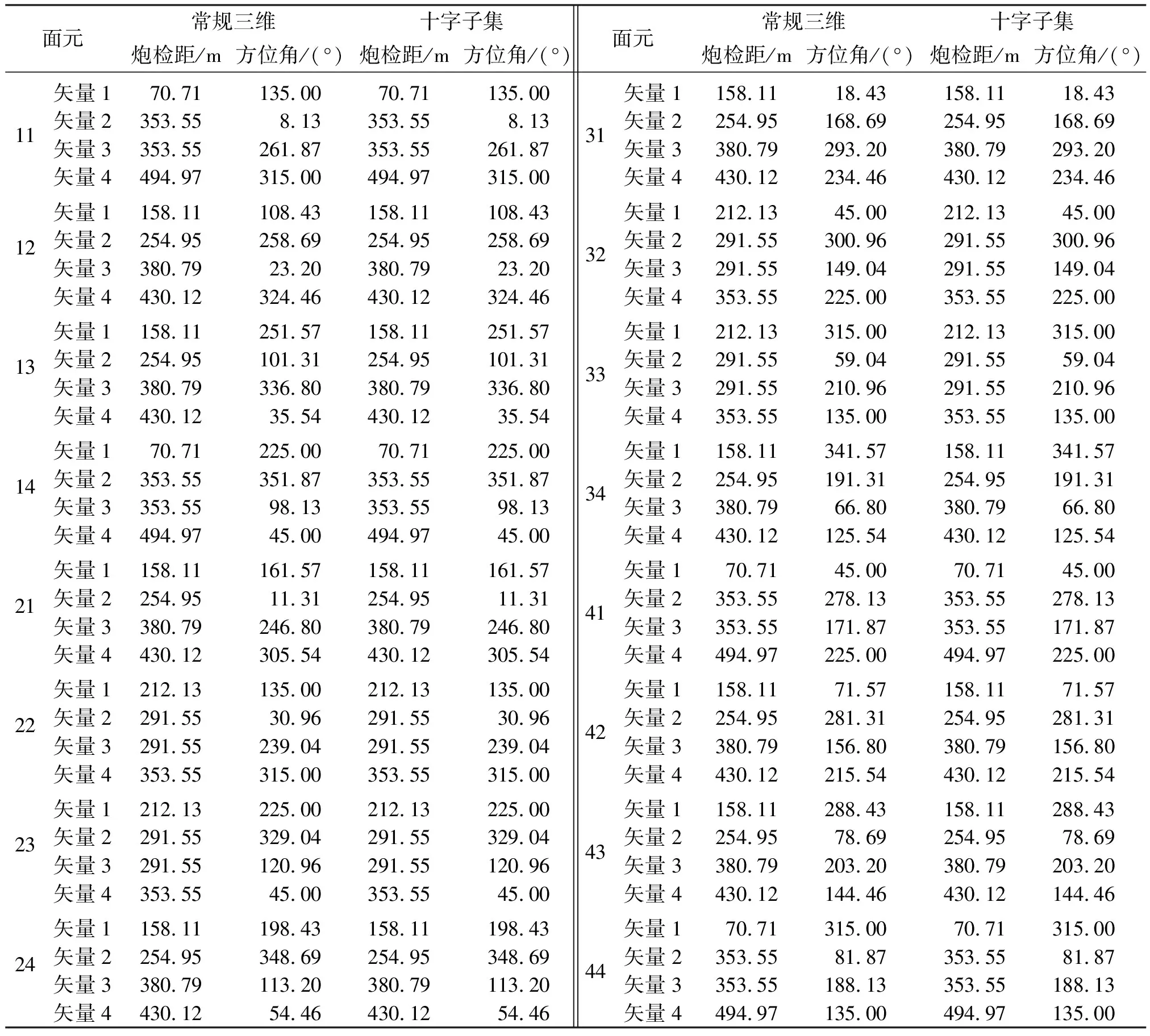
附表1 常规三维模型与十字子集满覆盖区相同子区对应面元内炮检矢量对比数据
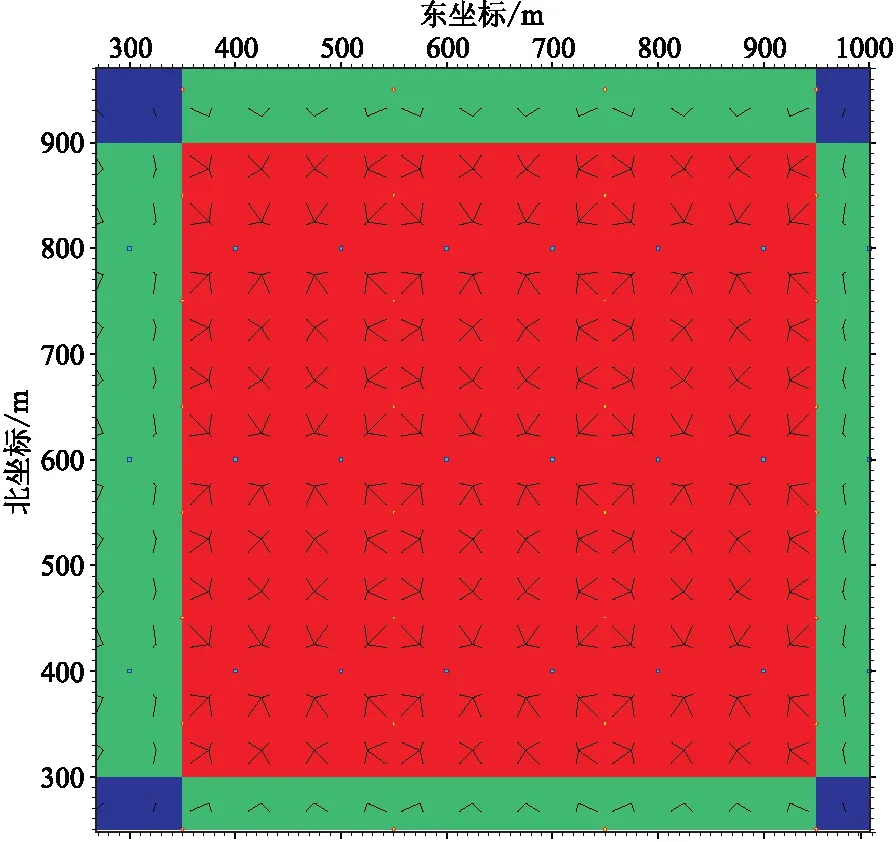
图6 常规三维地震观测系统模型满覆盖“蜘蛛”图
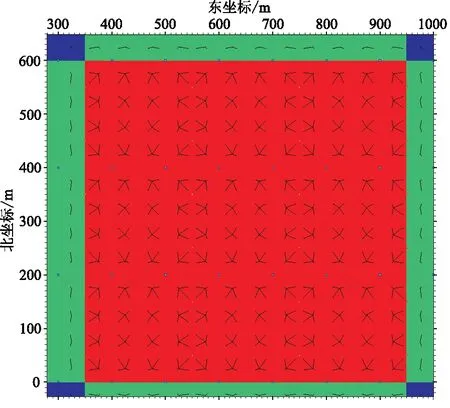
图7 十字排列满覆盖“蜘蛛”图
十字子集排列与常规陆上三维地震观测系统包含相同的炮检矢量,排列纵、横向滚动后,满覆盖区具有完全相同的炮检矢量组合。因此,在变观设计时,只要变换后的观测系统所构建的十字子集与原观测系统的十字子集相同,则可认为变换前、后的观测系统是等价的。由此可见,十字子集是联结不同观测系统等价变换的纽带。
3 两种基本的观测系统变换
目前,基于相同十字子集的变观设计主要有两种基本形式,即推拉式观测系统和大十字观测系统。大多数正交观测系统变换都是推拉式或大十字观测系统中的一种或两者的交互应用。
3.1 推拉式观测系统
推拉式观测系统(图8)是在常规三维地震观测系统(图2)的基础上,将检波线数减至常规三维地震观测系统的一半,炮点由原来布设在中间两条检波线之间的一组炮,改变为布设在接收排列两侧的两组炮(图8)。推拉式观测系统纵、横向滚动距与原观测系统的相同,即纵向以炮线距滚动,横向以检波线距滚动。推拉式观测系统检波线数减半,横向通过增加一组炮,使得横向反射点数和反射点距与原观测系统相同,在同样的横向滚动距下,横向满覆盖次数与原观测系统保持相同,即等于推拉式观测系统检波线数(原观测系统检波线数的一半)。推拉式观测系统检波线数减少一半,而横向炮数则增加了一倍。
从推拉式观测系统很容易提取与原观测系统完全相同的十字子集(图3)。因此,推拉式观测系统与原观测系统完全等价。图9为推拉式观测系统(图8)的一次炮检矢量分布,可见其与原观测系统炮检矢量分布(图4)有所不同,为原观测系统炮检矢量分布的中间线分开后反折分布,包含了相同的炮检矢量。图10为推拉式观测系统纵、横向滚动4次满覆盖的“蜘蛛”图,比较图10与图6可知,推拉式观测系统与原观测系统的满覆盖区对应面元具有完全一致的炮检矢量分布。
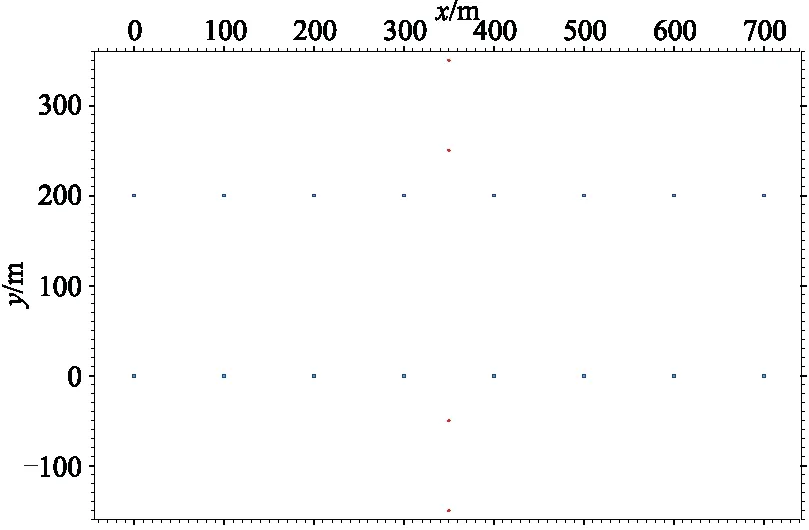
图8 推拉式观测系统模型
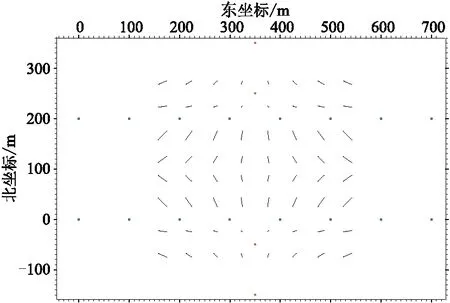
图9 推拉式观测系统模型一次炮检矢量分布
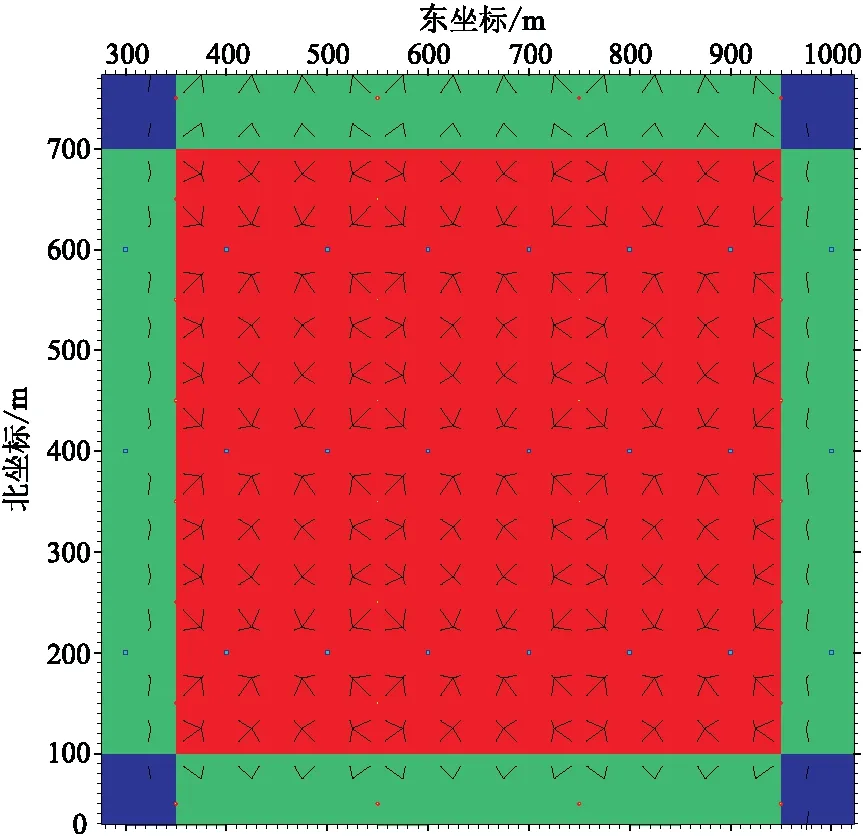
图10 推拉式观测系统模型满覆盖“蜘蛛”图
推拉式观测系统上侧炮组和下侧炮组所产生的炮检矢量分别构成满覆盖“蜘蛛图”的下部与上部。当且仅当排列片横向滚动后,只有上、下两组炮点位置完全重合的条件下,满覆盖面元内才能形成完整的“蜘蛛图”,这是应用推拉式观测系统的前提条件。推拉式观测系统通过排列两侧炮点横向滚动后的炮点重复,实现面元炮检矢量全方位组合,达到与原始观测系统面元属性完全相同的目的。
张怀[8]提出由常规三维地震观测系统(图11)变换为三种推拉式观测系统形式。第一种为基本推拉式观测系统(图12);第二种推拉式观测系统(图13)是将检波线数选为原观测系统的1/3,重复3倍放炮;第三种推拉式观测系统(图14)的检波线数为原观测系统的1/4,重复4倍放炮。后两种推拉式观测系统是基本推拉式观测系统的延伸形式。此三种观测系统有一个共同特点,即其十字子集完全相同。根据这一原则,还可设计出更多的推拉式观测系统形式。推拉式观测系统的线数应设定为原观测系统线数的因数,推拉式观测系统的炮点位置即为该线数的原观测系统炮点位置。可将十字子集排列看成是检波线数最少的一种特殊的推拉式观测系统。
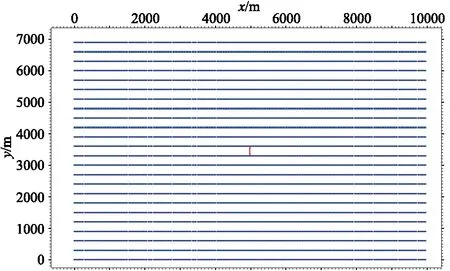
图11 常规三维地震观测系统
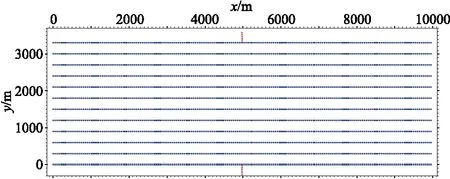
图12 每个炮点激发二次观测系统(检波线数为常规1/2)
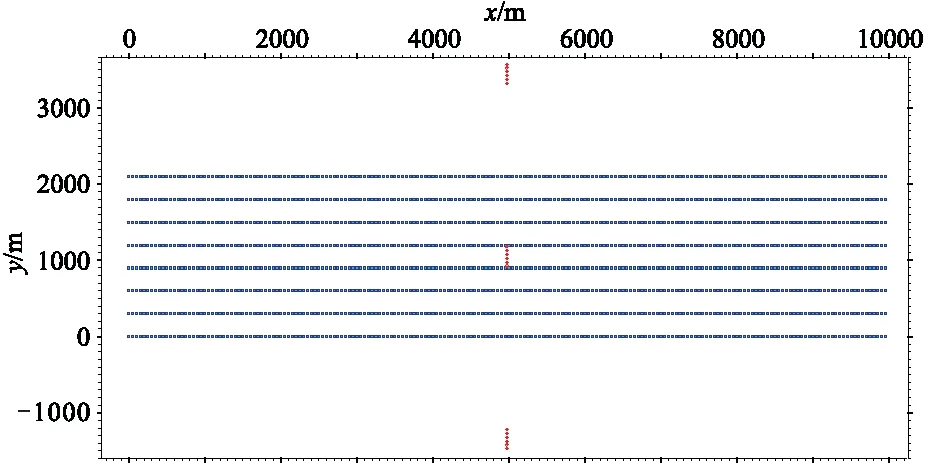
图13 每个炮点激发三次观测系统(检波线数为常规1/3)
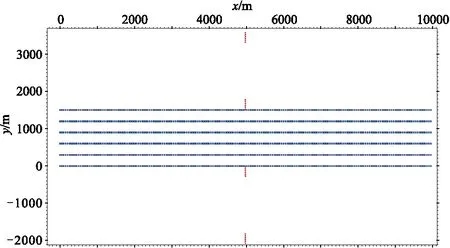
图14 每个炮点激发四次观测系统(检波线数为常规1/4)
推拉式观测系统的优点是与原观测系统完全等价,不产生冗余炮检信息,缺点是检波线数选择相对受限。推拉式观测系统适用于激发成本相对较低、激发效率相对较高的工区,如陆上可控震源激发。显然,三维地震高效采集项目更适合应用推拉式观测系统。推拉式观测系统与其他观测方式联合,也适用于海上地震勘探。
推拉式观测系统是炮点与检波点相对位置关系的一种观测方式。一般采用横向推拉方式,即炮点横向布设在排列两侧;也可采用纵向推拉方式,即炮点纵向布设在排列两端,还可采用纵横向联合推拉方式。图15为由陆上常规三维观测系统模型(图2)变换的纵、横向联合推拉式观测系统,道数减至原排列片的1/4,炮数是原观测系统的4倍。这与张慕刚等[7]提出的三种推拉式观测系统相一致。
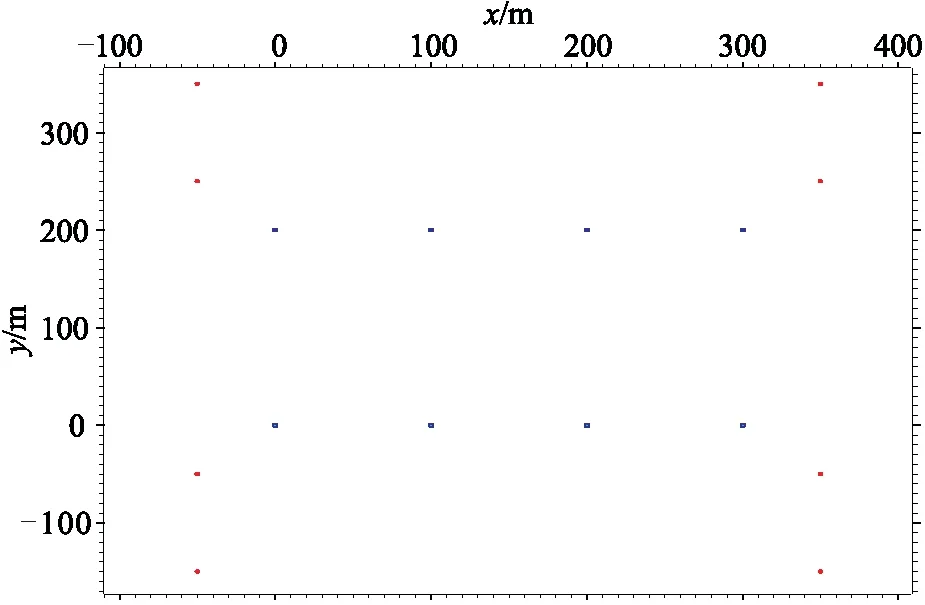
图15 纵横向联合推拉式观测系统模型
3.2 大十字观测系统
大十字观测系统为一条炮线与若干条检波线组成正交观测的一种炮、检关系(图16)。大十字观测系统检波排列的所有炮点一次采集完成,排列横向整体“搬家”(移动),每条检波线移动前必须采集完十字子集所有横向信息。满足大十字观测系统的每条检波线都包含原观测系统十字子集信息,大十字检波排列外炮线(附加炮)长度设计为十字子集炮线长度,大十字观测系统的总炮数必然多于十字子集炮数(一条检波线除外)。因此,大十字观测系统与原观测系统并不完全等价,相对于原观测系统,会产生横向冗余炮检距信息。
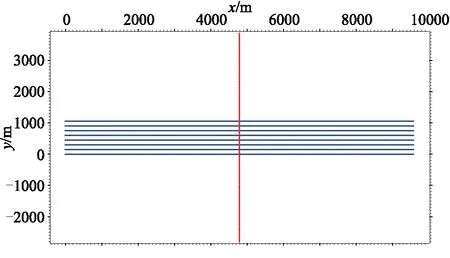
图16 大十字观测系统
由十字子集构建过程可知,十字子集单边炮线长度等于原观测系统横向最大炮检距,炮组数等于原观测系统的检波线数。由此得到大十字观测系统与原观测系统采集参数之间的关系,即大十字观测系统的附加炮组数与原观测系统的检波线数相等。
大十字观测系统检波线数选择,原则上是可任意的,但大十字观测系统的检波线数越少,重复炮数就越多,横向炮检距冗余就越少;检波线数越多,重复炮数就越少,横向炮检距冗余就越多。大十字观测系统与原设计观测系统采集的炮工作量之比符合以下关系
(1)
式中:Nrl表示原观测系统检波线数或大十字观测系统的附加炮组数;nrl表示大十字观测系统检波线数。
从式(1)可知:大十字排列检波线数nrl越大,M越小,即重复炮越少;大十字排列检波线数越少,重复炮越多,一条检波线达到惊人的Nrl倍炮。式(1)有助于根据地震采集设备的投入、工区部署、激发成本等因素,确定效益最大化的采集方式。
大十字观测系统一次横向采集产生的横向冗余炮检距数量可表示为
(2)
式中ns表示一组炮所含炮数。
由式(2)可看出,大十字观测系统横向冗余炮检距数量与大十字观测系统的检波线数是二次函数关系,也与每组炮数ns有关。随着大十字观测系统的检波线数增加,横向冗余炮检距数量增加很快,一条检波线的大十字观测系统没有横向冗余炮检距信息。
大十字观测系统每一条检波线的十字子集均不相同,要保持与原观测系统完全等效,只需剔除每条检波线中大于原观测系统横向最大炮检距的炮即可,常用的处理手段是横向限炮检距处理。只要大十字观测系统每条检波线在选定的横向限炮检距范围内都有正常炮点分布,限炮检距后覆盖次数即是均匀的,限炮检距后的覆盖次数等于限炮检距范围内的炮组数。保证大十字观测系统每条线横向都有正常炮点分布最大范围是大十字观测系统附加炮线长度,即十字子集单边炮线长度,也就是原观测系统横向最大炮检距,该范围内炮组数等于原观测系统检波线数的一半,即大十字观测系统最大横向有效限炮检距后,覆盖次数等于原观测系统覆盖次数,数据的炮检矢量也与原观测系统完全相同。
如果将大十字观测系统横向冗余炮检距作为有效信息使用,要注意这些冗余炮检距对数据精度的影响程度,冗余炮检距会不同程度产生地震数据“采集脚印”现象。当横向冗余炮检距作为有效信息使用时,大十字观测系统横向覆盖次数的均匀设计是有必要的。一方面,大十字观测系统接收排列两边的炮线长度不小于十字子集两边的炮线长度,检波线数选择也不是任意的。大十字观测系统横向搬家前,横向反射点数(每组炮选一个点)及覆盖次数相互关系可表示为一个梯形模板(图17红色折线),梯形模板的满覆盖点数等于附加炮组数,最高满覆盖次数为大十字排列检波线数,覆盖次数渐减带点数(含一个满覆盖点)也等于大十字排列检波线数,点距为半个检波线距。

图17 大十字观测系统梯形模板及横向推演示意
梯形模板横向滚动,每次滚动2nrl个点,满覆盖点总数被2nrl分若干次后,当剩余满覆盖点数为nrl时,相关梯形模板的覆盖次数渐减带才能无缝衔接成正常满覆盖次数,达到横向上满覆盖次数的均匀
(3)
式中k为自然数。将式(3)化简
(4)
由此不难得到满足横向满覆盖次数均匀条件公式
(5)
式中:Ns为大十字观测系统设计总炮数;ds为炮点距;Rli为检波线距;K为非零自然数。式(5)表明,大十字观测系统排列片的设计总炮点数乘以炮点距与检波线数乘以检波线距之比应为偶数,横向满覆盖次数才是均匀的。因与大十字观测系统的炮数、检波线数等参数的关系更明晰,所以更方便、实用。
大十字观测系统检波线数选择灵活,项目实施不受地震采集设备道数限制,较少采集设备道数也能进行宽方位、高密度地震勘探。大十字观测系统的另一优点是排列整体搬家,不需重复收放检波器等接收设备,可大大减轻海底节点、电缆等重复收放的工作量,因此该技术也被广泛地应用于海上地震勘探。大十字观测系统的缺点是重复放炮量较大,横向上不同程度地产生炮检距冗余,降低了激发炮的利用率。
大十字变观技术与推拉式观测系统一样,也是炮点与检波点相互位置关系的一种观测方式,不但适用于横向观测,也适用于纵向观测。
大十字观测系统横向上排列整体搬家滚动,纵向上滚动距与原观测系统相同,即一个炮线距。陆上地震勘探大多单独使用大十字观测系统;海上应用大十字观测技术时常与其他以炮代道观测技术联合进行。纵、横向均采用大十字观测技术的观测系统称为“Patch”排列片,“Patch”观测系统是与接收排列所有相关炮点一次采集完成,然后排列片以横向检波线数、纵向接收道数为滚动距,实施整体搬家。“Patch”观测系统的施工组织较灵活,早期海上地震勘探运用较多。“Patch”观测系统缺点是重复炮量大,冗余炮检信息更多。
大十字观测中检波线数(道数)设定更灵活、自由,对于“Patch”观测系统,原则上“单道”也能实现宽方位、高密度地震勘探,它是以海量重复激发炮数为前提的。
当横向采用推拉式观测、纵向采用大十字观测时,推拉式的横向两组炮叠加大十字观测模式,就形成两个炮线束,平行分布在排列两侧,这种观测系统常被称为平行观测系统(图18)。平行观测系统采用横向滚动一条检波线、纵向上排列整体搬家的滚动方式,兼顾了“Patch”观测系统海上勘探优点,最大程度减少了重复炮。目前,平行观测系统成为海上地震勘探的常用观测系统。平行观测系统的施工顺序一般先横向滚动采集,后纵向采集。由于排列片纵向整体搬家,可根据工区部署情况和采集设备投入量,将工区划分为若干块进行采集,每块称为一个“Zipper”(有时也称作“Tier”),根据Zipper长度设计接收排列长度和接收道数。
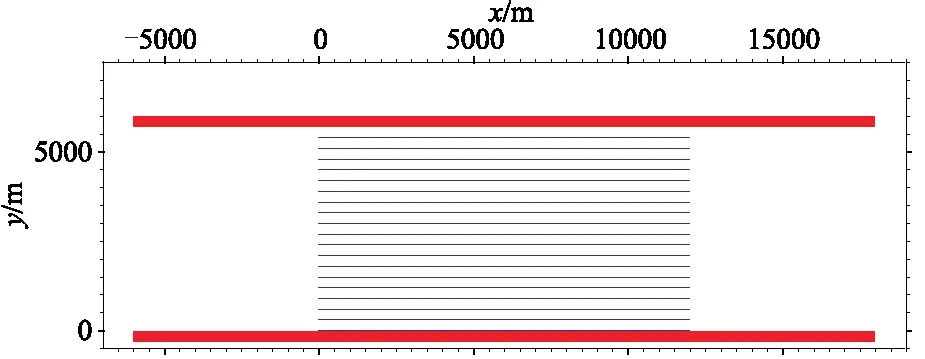
图18 平行观测系统
4 应用实例
4.1 东非M探区大十字观测系统变换
在东非M探区进行地震勘探时,油公司给定的三维地震采集观测系统模板为48线×6炮×384道,检波点、炮点距均为25m,检波线、炮线距均为150m,排列片纵、横向滚动距分别为炮、检线距(150m),采用可控震源激发。按照该观测系统施工,排列片总道数为18432。考虑到排列滚动时的备用线,所需投入的仪器采集道数至少要达到40000,而当时在该区所拥有仪器采集道数尚不足15000,重新调集或购置仪器将会延误工期。
在此情况下,只能尝试以炮代道的变观方案。甲方油公司接受变观进行现场数据采集的动议,但强调变观采集的地震资料信息不少于原设计观测系统应获取的地震信息,且通过处理手段可获得原设计方案能获取的所有资料成果。在反复权衡所具备的接收道数能力和处理方法的基础上,最终采用的以炮代道方案为大十字观测系统,其模板为16线×384炮×384道(图19)。炮、道距和炮、检线距等采集参数均与原观测系统相同,大十字横向滚动16条检波线(2400m),纵向滚动一条炮线(150m)。
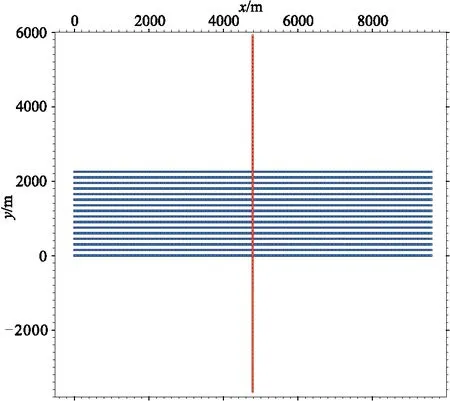
图19 东非M探区实施的大十字观测系统
原观测系统模板检波线数为48、炮点数为6,变观后的大十字观测系统检波线外每侧炮点应不少于144个,而实际设计的大十字观测系统每侧炮点为147个,包含了原设计观测系统十字子集信息。从横向满覆盖次数均匀性分析,大十字观测系统总炮数乘以炮点距与检波线数乘以检波线距之比为4,符合比值为偶数的要求。大十字观测系统的附加炮组数比十字子集多一组(6)炮,充分地考虑并达到了横向覆盖次数均匀。该项目采用大十字观测系统采集后,检波线数降为原设定数的1/3,炮数是原设计方案的4倍。
采用的大十字观测系统横向最大炮检距为5912.5m(原设计为3587.5m),总覆盖次数达到1024(比原设计增加256次),总炮道密度也增加了。将大十字观测系统横向滚动3次、纵向滚动42次,获得纵向满覆盖次数32、满覆盖长度1650m;横向满覆盖次数32、满覆盖宽度3675m的包含大十字排列全部炮检信息特征的满覆盖资料区域。
图20为大十字观测系统满覆盖区的最大炮检距分布,蓝色区面元的最大炮检距小,红色区面元的最大炮检距大,具有在横向上分块、条带状分布的特征,最大炮检距相差达1km;大十字排列横向滚动衔接部位满覆盖区(中间1/3条带宽度)与其他满覆盖区的最大炮检距分布在细节上也存在差异。
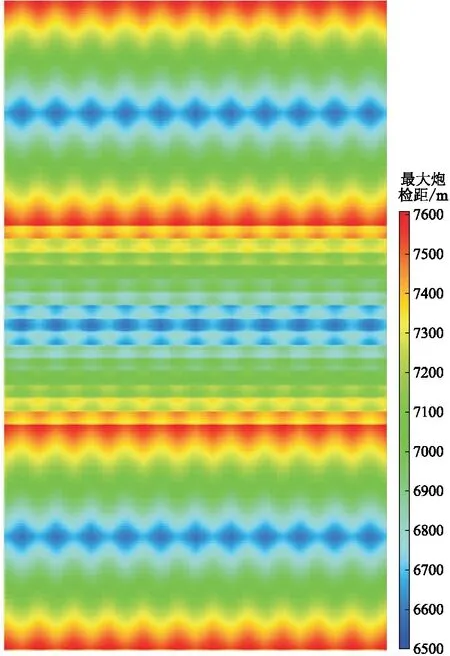
图20 大十字观测系统最大炮检距分布
图21为通过横向限炮检距得到的原观测系统的最大炮检距分布,该分布在纵、横向分别以炮、检线距(150m)为步长呈空间周期变化,最大炮检距相差约为180m。可见大十字观测系统横向产生的冗余炮检距信息,在空间上的分布是不均匀的,影响了数据整体的均匀性。
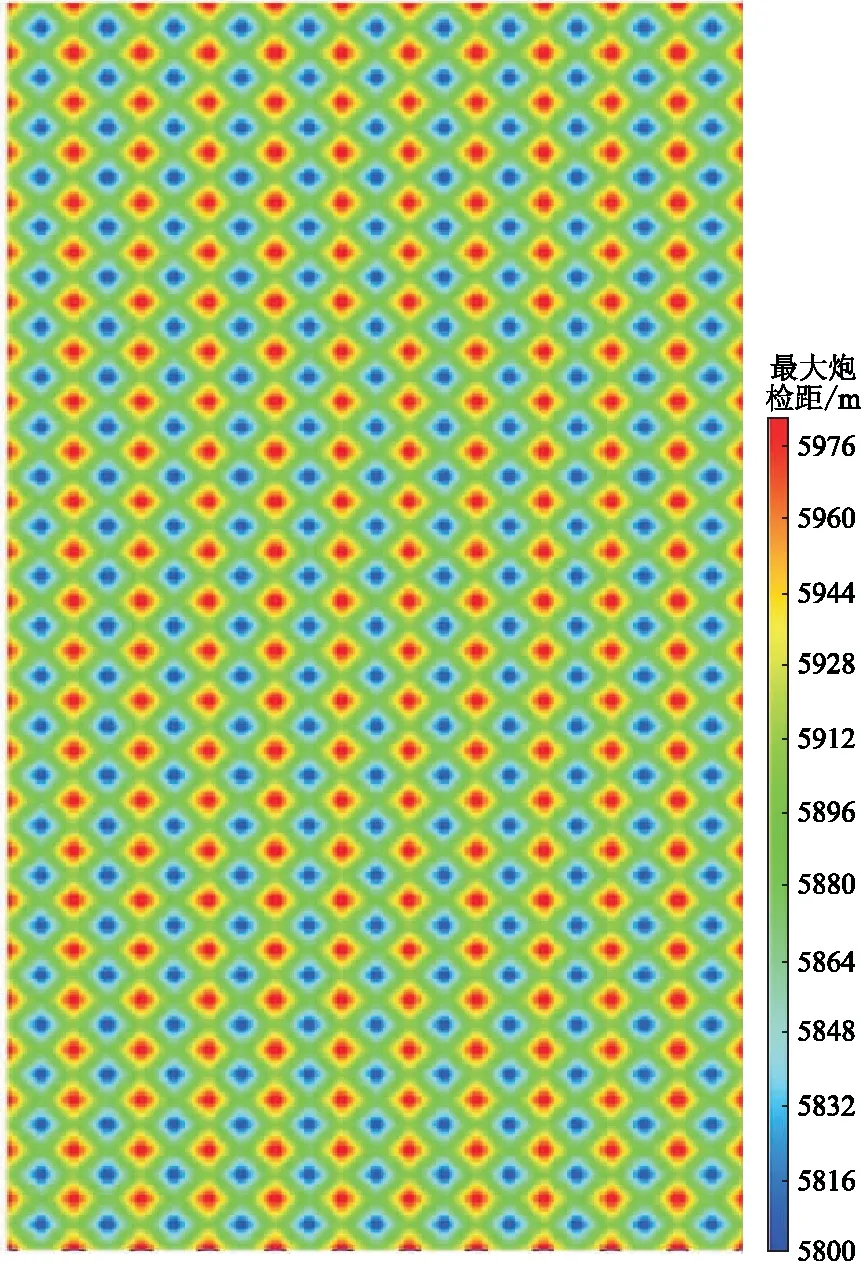
图21 原观测系统最大炮检距分布
采集脚印是成果数据在空间上子波形态的差异,主要表现为振幅差异。从采集脚印的观测系统成因分析,炮检矢量空间差异是造成地震采集脚印的根本原因,采集脚印分布随炮检矢量空间变化而周期性地变化。根据东非M探区的主要勘探目的层埋深和岩性参数,分别对大十字观测系统和原观测系统进行地震采集模拟叠加分析。
图22、图23分别为大十字观测系统与原观测系统的数值模拟叠加结果。可见大十字观测系统模拟叠加振幅空间变化大,最小值为32.90,最大值为33.51,振幅相对变化达1.82%;原观测系统模拟叠加的振幅最小值为27.24,最大值为27.26,振幅相对变化仅0.07%。大十字观测系统的所有横向信息都参与处理应用,会产生地震采集脚印问题。大十字观测系统采集脚印产生的主要原因,类似于早期束线三维观测系统,因其设定的炮点线长,排列片横向滚动距大,是导致产生“采集脚印”的重要因素之一[20]。
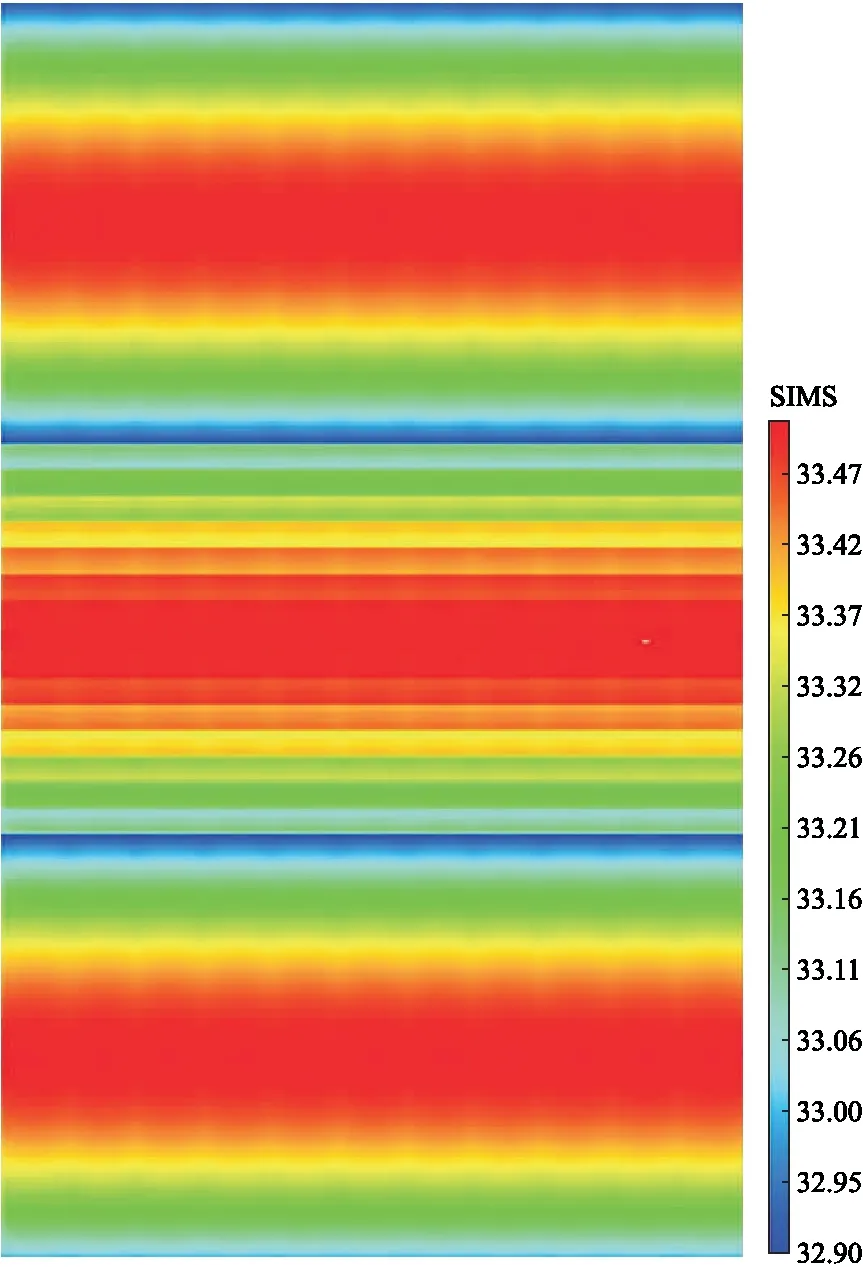
图22 大十字观测系统模拟叠加振幅分布
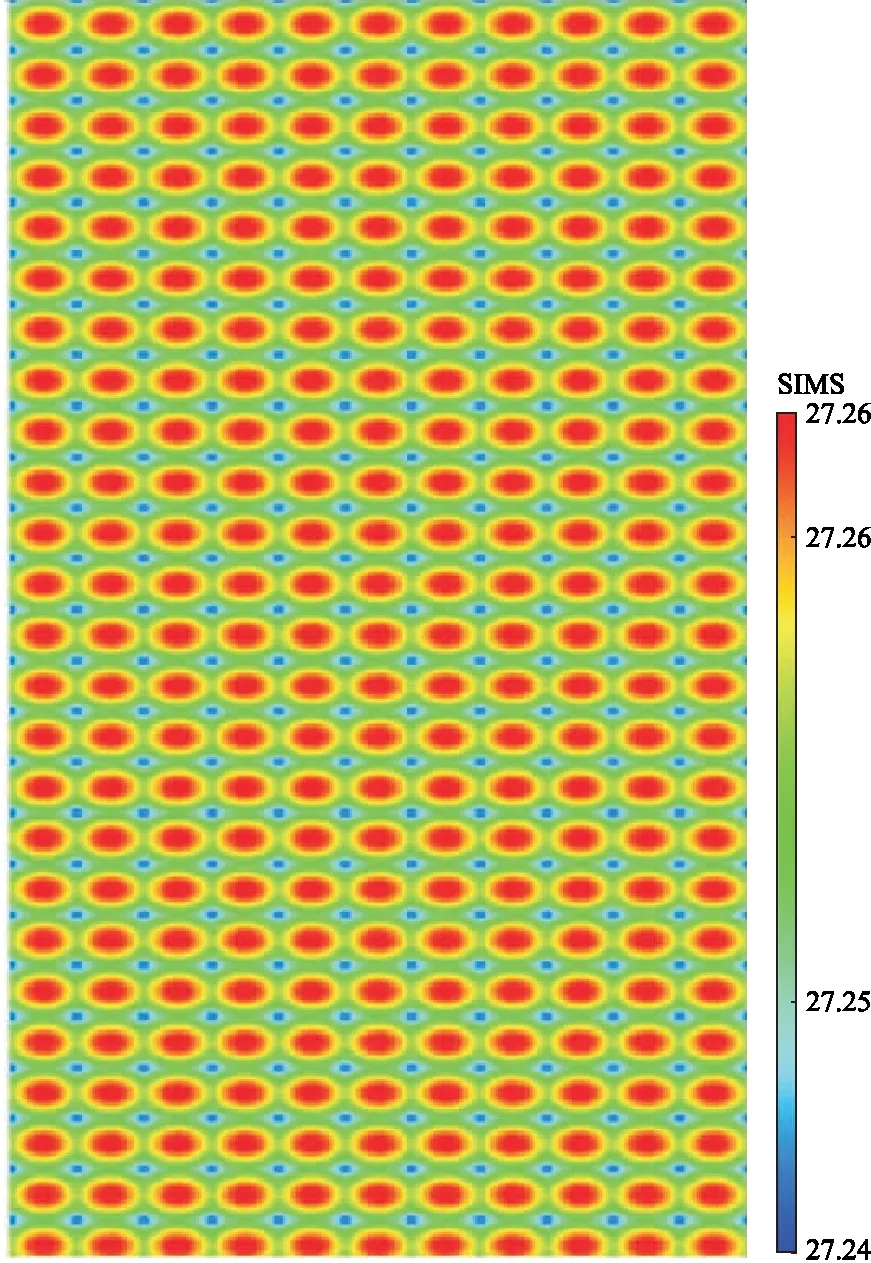
图23 原观测系统模拟叠加振幅分布
从对地下成像点采集信息贡献角度分析,横向大炮检距信息拓宽了波数范围和空间分布,能提高成像点子波空间分辨率,使横向偏移归位更准确。但横向炮检距大而不匀带来了地震数据的采集脚印问题。对于大十字观测系统的横向大炮检距信息的取舍,应根据大十字观测系统纵、横向最大炮检距参数和地震数据用途综合考虑,慎重使用。
在大十字观测系统设计时,已考虑了包含原始观测系统的十字子集信息,将横向限炮检距的最大炮检距选择为原观测系统的横向最大炮检距,对大十字观测数据进行横向限炮检距处理后,覆盖次数均匀,且完全等同于原设计观测系统数据体属性。
4.2 印尼某海上平行观测系统变换
观测系统参数做以下设定。
接收排列:21线×295道=6195道
检波线距:200m 道距:50m
激发排列:2束×4条(Inline)×949炮
=7592炮
炮线距:50m 炮点距:25m(Inline)
两个炮线束的每束包含4条炮线;奇数炮线与偶数炮线之间错位半个炮点距(图24),检波器类型为海底节点。
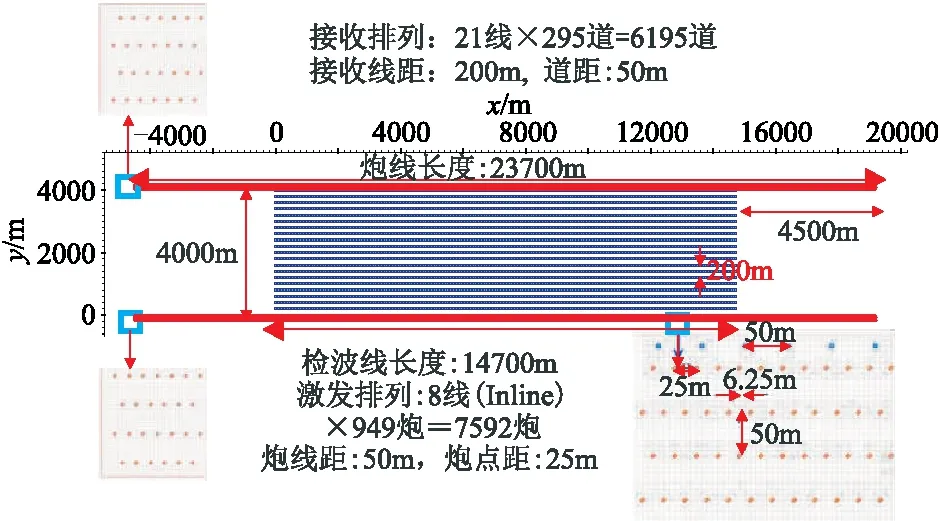
图24 印尼某海上平行观测系统
该平行观测系统纵向上采用大十字观测、横向上采用推拉式观测技术。滚动方式为:横向上滚动一条检波线(200m),纵向上滚动距为整个排列长度(14700m)。现场采集时,纵向上将工区划分为若干个“tier”,每个“tier”长度即为14700m。即先横向滚动采集,每束线的两个炮线束采集完成,横向滚动一条检波线;每个“tier”横向采集完成,纵向搬家,进行下一个“tier”的采集工作。
该平行观测系统的奇数炮线与偶数炮线错位半个炮点距,这通常是气枪施工的需要,尤其是多源船施工,一方面给气枪充气留有时间,另一方面是减少相邻炮间的气泡影响。奇数线与偶数线错动也实现了纵向面元细分,即纵向面元由12.50m细分为6.25m。两个炮线束的炮点对称接收排列错位分布,即下侧炮线束奇数炮线纵向错位半个炮点距,上侧炮线束偶数线纵向错位半个炮点距,这样的布炮方式使得横向滚动后,上、下两束炮线的炮点均不重复,中心反射点也不重复,奇、偶炮线错开后横向面元宽度由单边50m再次细分为25m。最终实现空间数据采集密度为6.25m×25m。横向满覆盖次数并不等于检波线数(21次),而是将21次覆盖横向分开分布,因为奇数检波线横向覆盖次数会以11次、10次交替分布。
上、下炮点横向滚动不重复的结果,纵、横向滚动后的“满覆盖”炮检矢量为原观测系统“蜘蛛图”的上部或下部,且在相邻面元上下、左右交替分布(图25)。通常数据处理时,纵向面元选择为12.5m,从而使每个面元的“蜘蛛”图与原设计观测系统相同,横向满覆盖次数也变为21次。

图25 实际观测系统满覆盖“蜘蛛”图(局部)
该平行观测系统总接收道数为6195(原设计的总接收道数为7560)。从排列片总道数看,平行观测系统的总道数比原观测系统的总道数并未明显减少。因为该项目为勘探公司重大勘探项目,配备地震采集节点设备数量相对较多。最终实施观测系统的选择是在充分利用所配备节点设备的基础上,合理划分采集区块,最大程度地减少重复放炮,以达到采集效率最大化。
根据式(5)计算,该平行观测系统纵向满覆盖次数并不均匀,纵向最大炮检距达19200m。观测系统设计更多地考虑了数据处理在纵向上做限炮检距(4500m)处理,对采集数据进行筛选,剔除纵向冗余炮检距信息,回归原设计观测系统数据属性。
对该平行观测系统纵向限炮检距4500m后,排列未滚动,纵向满覆盖次数为90,满覆盖长度为10.3km。若采用常规三维观测系统采集同样面积的数据,则根据海底节点施工要求,至少需配备19950道海底节点。充分体现了大十字、推拉式等以炮代道观测技术在海上节点地震采集中发挥的重要作用。
5 结论
以炮代道变观技术结合现代三维地震高效采集技术,对宽方位、高密度地震勘探发挥着越来越重要的促进作用。以炮代道变观设计能以有限的道数实现超高道数的高密度现场采集;对于海上地震勘探,也可通过以炮代道变观设计最大程度地减轻海底节点、电缆施工工作量。通过分析、总结以炮代道变观技术,取得以下几点认识:
(1)以炮代道变观是对现场数据采集方式的改变,变观不应改变原地震采集工程技术设计确定的观测系统的数据属性;变观要与原地震采集工程技术设计的观测系统等价,十字子集相同是变换后观测系统等价于原设计观测系统的基本条件。
(2)推拉式、大十字、平行观测系统、Patch观测系统等都是常规三维观测系统的一种等价变换形式;非等价变换的观测系统评价实质是对观测系统参数选择的评价,不应武断某种变观形式的优劣。
(3)推拉式观测系统和大十字观测系统是正交观测系统变换的最基本变观形式,大多数复杂的变观设计都可分解为推拉式和大十字两种形式。推拉式观测系统属性与原观测系统完全等价,大十字观测系统剔除冗余炮检距信息后,也与原观测系统完全等价。
(4)推拉式和大十字变观技术均可在接收排列的横向或纵向上适用。推拉式观测系统不产生冗余炮检距信息,炮道数之积与原观测系统的炮道积是一种恒定关系。大十字线(道)数选择较灵活,线(道)数多,重复炮数越少,产生冗余炮检距信息就越多;线(道)数少,重复炮数就越多,产生的冗余炮检距信息反而少。大十字观测系统炮道积常大于原观测系统的炮道积。
猜你喜欢
文史春秋(2022年4期)2022-06-16
安庆师范大学学报(自然科学版)(2021年1期)2021-11-28
数学大王·趣味逻辑(2021年3期)2021-03-10
科学与信息化(2020年4期)2020-10-21
合肥工业大学学报(自然科学版)(2020年2期)2020-03-23
南京大学学报(数学半年刊)(2020年1期)2020-03-19
汽车观察(2018年12期)2018-12-26
大科技·C版(2018年4期)2018-10-21
数学大世界(2018年1期)2018-04-12
都市丽人(2015年4期)2015-03-20