
利用机器视觉远程监测煤矿带式输送机故障
2022-08-02 03:05谢元媛
能源与环保 2022年7期
文 灵,谢元媛
(乌鲁木齐职业大学,新疆 乌鲁木齐 830002)
煤矿产业在工业领域中表现突出,科技飞速发展促进煤矿业的自动化水平不断攀升。煤矿带式输送机凭借简易、高效、远程等优势,对散状、大型等物料均具有良好的输送能力,作为工业生产工艺环节中重要的运输设备,该设备为降低输送成本、减小劳动强度、提升生产效率作出了重大贡献[1]。输送机由数以千计的托辊、滚筒及驱动滚筒等元件构成,若任意旋转元件出现性能退化现象,均会导致输送机异常故障发生,设备始终处于不间断的负载运行状态,一旦未及时发现、处理,使故障突发,就会形成链式反应,引发生命、财产损失等不可估量的严重后果[2]。为此,国内外诸多学者纷纷就此课题展开深入研究。在国外,部分工作者基于常见的旋转机械故障机理[3],建立故障诊断模型;在国内,杨林顺研究小组与周从军[4-5]分别采用图像处理技术与蚁群算法,构建出输送带跑偏故障在线检测技术与输送机运行状态监控系统。虽然上述方法均取得了较好的研究成效,但综合性能欠佳,国外建立的诊断模型仅用于输送机设备自身故障,检测技术仅用于输送带跑偏故障,而监控系统采用的蚁群算法收敛速度较慢。
综上,本文采用机器视觉技术,通过模拟人眼视觉,实现带式输送机异常故障远程监测。机器视觉技术灵活性较强,适用于煤矿业的复杂工作环境,有助于及时发现设备及环境异常,提升自动化程度与监测精准度,确保输送机安全可靠运行,加快生产效率,减小工作量,确保人员安全。
1 机器视觉远程监测架构搭建
运用机器视觉技术来远程监测煤矿带式输送机的异常故障,从本质上讲,就是利用计算机视觉与图像处理技术[6-7],通过模拟人眼视觉,提取输送机有效图像信息,经处理、预判,以非接触形式自动化地检测出输送机存在的异常故障。
采用电荷耦合器件工业相机、图像处理器、计算机等主要部件,发光二极管照明装置、除尘装置等辅助部件,建立机器视觉远程监测架构,如图1所示。
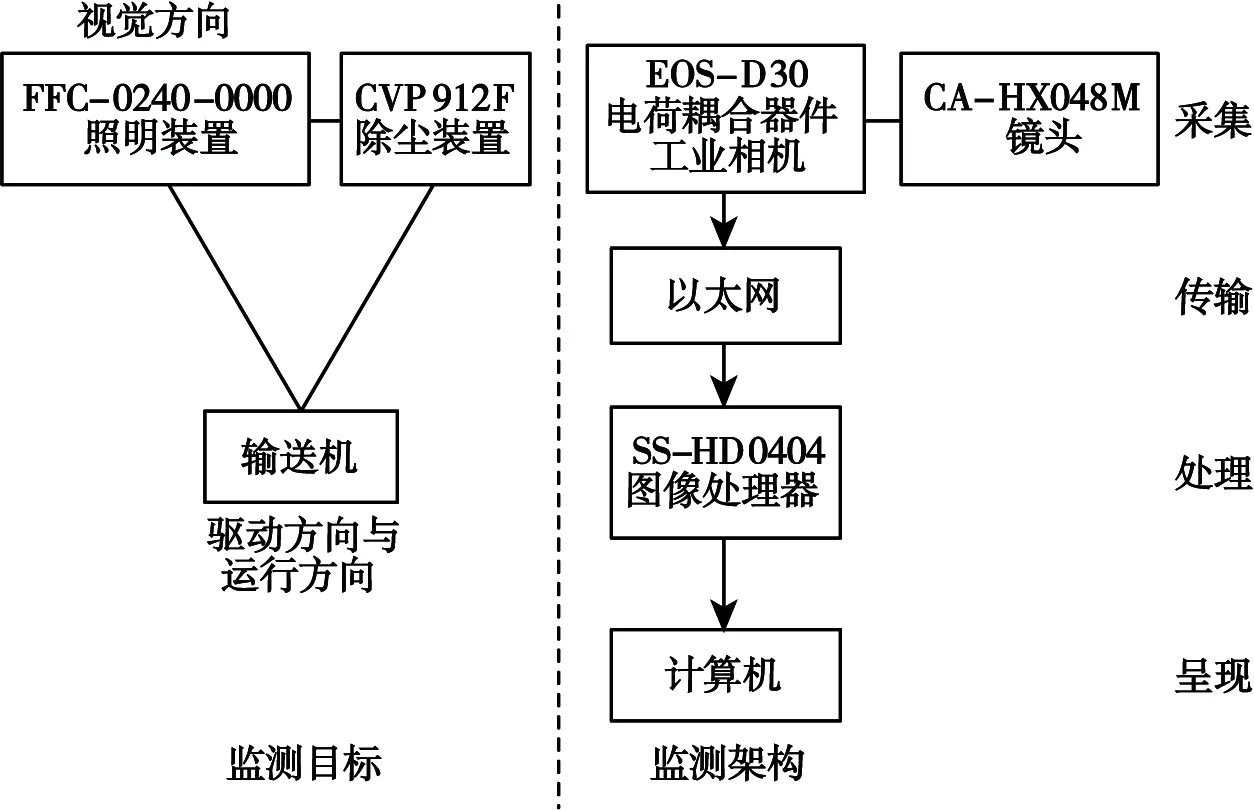
图1 机器视觉远程监测架构示意Fig.1 Schematic diagram of machine vision remote monitoring architecture
将电荷耦合器件工业相机同步采集的输送机工作图像,经以太网[8]实时传输至图像处理器;根据光反射理论[9],异常故障发生时,光源会产生漫反射现象[10],照射在输送机上形成的反射光线平行进入视觉传感器后,因反射光差异得到灰度值呈不同分布特点的图像,利用图像处理器,根据连续多帧图像的灰度差[11],提取出故障信息,呈现在计算机上,实现异常故障监测。开始监测前,将输送机异常故障类别及工作环境的几何特征、纹理特征等属性[12-13]输入图像处理器中,以便后续故障判定。
为更准确、更全面地监测输送机异常故障,在输送机托辊、胶带等主要部件[14-15]上安装不同类型、不同功能的传感器,提升故障监测结果的可靠性。传感器的具体选型与用途见表1。
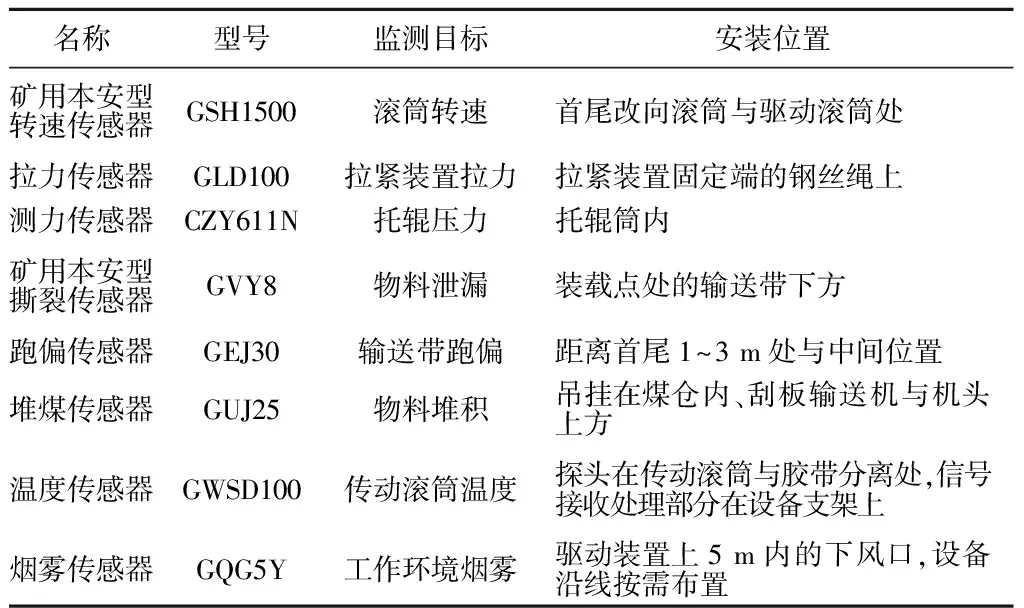
表1 基于不同监测目标的传感器选取Tab.1 Sensor selection based on different monitoring targets
在输送机持续运转的过程中,为准确处理连续多帧的视觉图像,采用下列方程式,计算监测目标的移动速度:
v=Δs/Δt
(1)
式内,Δs、Δt分别为监测目标的相对位移与连续两帧间的时隙,计算公式如下:
Δs=si-si-1
(2)
Δt=ti-ti-1
(3)
式中,si、ti为第i时刻下监测目标的空间位置与帧时间;si-1、ti-1为第i-1时刻下监测目标的空间位置与帧时间。
3 实例验证与分析
针对某企业一台运行中的KM-SSJ型输送机,搭建试验场景。根据输送机的驱动方向与运行方向,布置照明装置、除尘装置等辅助设备,明确视觉方向后,利用监测架构对该输送机展开远程监测。
机器视觉的根本为图像,按照监测架构采集、传输、处理、呈现的实现流程,从图像角度将其重新划分为对比度增强、滤波降噪、阈值分割、故障定位及故障判定5个阶段。从工业相机采集的图像中任意选取一张输送带撕裂图像,如图2(a)所示。对于该初始图像,每个阶段采取的处理方法与所得视觉结果分别如下。
(1)对比度增强。采用直方图均衡化方法[16]处理工业相机采集的初始图像,通过非线性拉伸,重新分配图像像素值,使灰度直方图较为集中的灰度区间均匀分布在整个灰度范围里。均衡化处理前后的图像如图2所示。

图2 直方图均衡化图像示意Fig.2 Schematic diagram of histogram equalization image
比较处理前后的图像可以看出,经过直方图均衡化处理后,不仅突出了初始图像中的特定信息,显著强调图像的兴趣特征,而且无效信息受到极大程度削弱,拉大了感兴趣部分与不感兴趣部分的差异性,为图像的下一步处理奠定了良好的对比度基础。
(2)图像滤波降噪。利用改进的小波域均值滤波法[17],滤除增强图像中含有的混合噪声。针对图像各像素点移动模板,令各点与滤波模板中心依次重叠。因模板尺寸对滤波效果存在一定影响,故先基于初始图像探讨两者之间的关系。此环节的实验结果如下:模板规格为3 mm×3 mm、4 mm×4 mm、5 mm×5 mm、6 mm×6 mm、7 mm×7 mm、8 mm×8 mm、9 mm×9 mm、10 mm×10 mm时,对应的峰值信噪比为87.46、86.28、84.88、83.91、81.71、80.11、77.57、77.06 dB。
由此可见,模板规格越大,峰值信噪比越小。因此,选取尺寸为3 mm×3 mm的滤波模板(注:模板尺寸最小规格是3 mm×3 mm),则通过式(4)进行图像滤波处理,滤波后的图像如图3所示。
g(x,y)=[g(x-1,y-1)+g(x,y-1)+g(x+1,y-1)+g(x-1,y)+g(x,y)+g(x+1,y)+g(x-1,y+1)+g(x,y+1)+g(x+1,y+1)]/9
(4)

图3 均值滤波图像示意Fig.3 Schematic diagram of mean filtered image
对比图2(b)的增强图像可知,经均值滤波降噪处理过的图像,在未降低图像对比度的基础上,图像细节更加清晰,且能有效去除增强图像中含有的混合噪声。根据模板尺寸与滤波效果之间的负相关性,今后投入应用时均选取3×3的滤波模板,提升去噪效果,减小模糊度。
(3)图像阈值分割。为快速定位与判定异常故障,根据图像灰度分布的不同,通过阈值分割去除图像背景,保留存在潜在故障的目标图像。该环节中先利用canny算子[18],获取图像边缘,提升细节精度,再依据像素点的邻域灰度分布形式,利用式(5)明确滤波图像的阈值大小,得到目标与背景的阈值分割图像,如图4所示。

图4 阈值分割后故障范围示意Fig.4 Schematic diagram of threshold segmentation image
(5)
式中,σ为标准差,为满足实验环境需求,手动调整标准差;c为偏移量。
结合图3所示的均值滤波图像可以看出,分割后的图像边缘精准度更高,背景里也不存在明亮噪声,更好地实现了监测目标与背景的分离,保证了故障定位与判定的图像质量,有助于提升远程监测准度。
(4)异常故障判定。融合支持向量机[19]与组合核函数[20],构建基于组合核函数的支持向量机。该支持向量机用于配比故障定位图像与图像处理器显示的几何特征、纹理特征等属性,判定异常故障的类别。该支持向量机的判定实现模式如图5所示。

图5 基于支持向量机的异常故障种类判定结构图Fig.5 Structure diagram of abnormal fault type determination based on support vector machine
根据计算机上显示的异常故障监测结果可以看出,异常故障判定结果吻合故障发生的实际情况,均为输送带撕裂故障。
所得监测结果可以直观获取到输送机异常故障的远程监测结果,为工作人员迅速作出相应举措提供有效依据,加快故障检修速度,防止产生一系列连锁反应,导致事态升级。
3 结论
煤炭需求逐年升高,煤矿带式输送机凭借大输送量、长输送距离、高输送效率等诸多优点,在煤矿行业的生产领域中得以广泛应用,并逐渐演变成不可或缺的输送设备。输送机作为旋转机械,如若故障发生、升级,势必会造成无法预计的财产损失与人员伤亡。为降低人工巡检强度,及时、准确地发现异常故障,以机器视觉为技术支撑,提出异常故障远程监测方法。各项技术迅猛发展,输送机日益呈复杂化、大型化方向发展,故障类型也越来越多样化,因此,从以下两点完善监测方法,增加适用性与实用价值:持续更新故障数据库,尽可能覆盖所有故障类型;结合新型元件与图像处理算法,进一步优化视觉质量。
猜你喜欢
山东煤炭科技(2022年8期)2022-09-14
煤炭工程(2022年8期)2022-08-24
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
建材发展导向(2019年11期)2019-08-24
电子制作(2018年16期)2018-09-26
山东工业技术(2016年15期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
科技传播(2012年2期)2012-02-01
