
基于雷视融合的路侧感知的应用
2022-08-02 01:18:02黄智伟
现代工业经济和信息化 2022年6期
黄智伟, 冯 蘅, 刘 鹏
(上汽通用五菱汽车股份有限公司广西汽车新四化重点实验室, 广西 柳州 545007)
引言
目前,在一些港口、矿区、物流园区、高速公路等封闭或半封闭场景,已经可以实现自动驾驶,但自动驾驶仍未能普遍推广。由于复杂路况的存在,感知能力不足严重制约着自动驾驶汽车的快速落地。由此,路侧感知就极为重要。它通过布设在道路两侧的各种传感器来实时获取道路的信息,并将道路信息共享给所有道路参与者,从而使得各个道路参与者能够实时获取周围环境信息,并快速做出决策。
1 路侧感知技术
路侧感知需要很多传感器,它们的作用主要是实现路况环境的数据信息采集,为路侧感知网络提供原始数据。如何做到精准感知并适用于各个交通场景,就需要路侧感知提出很高的要求。因此,全天候、大覆盖、高精度、多功能、低成本感知方案是未来路侧感知的重要发展方向[1]。在改进激光雷达本身的同时,多传感器融合也仍有必要,如表1 所示。
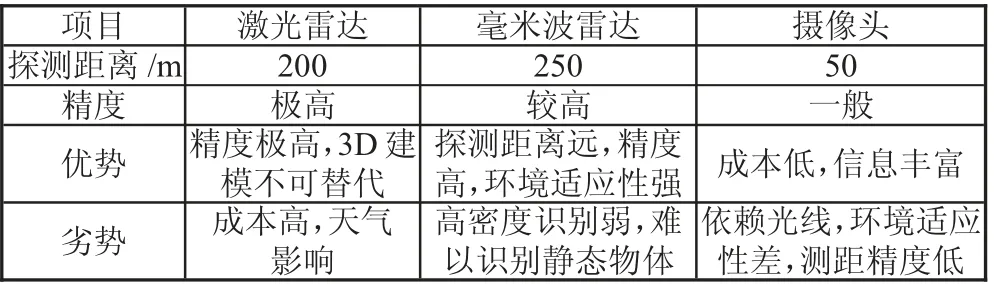
表1 各传感器性能对比
采用激光雷达与摄像头融合方式,通过两者信息融合,可以充分结合不同传感器的优势,弥补激光雷达的缺陷,并能增强显示彩色点云,实现感知信息提升。
2 在无人物流的应用
为辅助封闭道路内无人物流运输场景的无人驾驶的测试,搭建车路协同的测试环境,实现单车智能感知盲点的补充,实现无人物流车在封闭道路的正常运行[2]。
2.1 方案设计
2.1.1 方案分析
方案旨在补充单车智能感知的盲点,在上下料区、转盘、交叉路口等位置布置传感器设备,用于检测主要为人、车和障碍物等目标,以增加无人物流车对路侧环境的感知,提高无人物流车的行车安全性,如表2 所示。
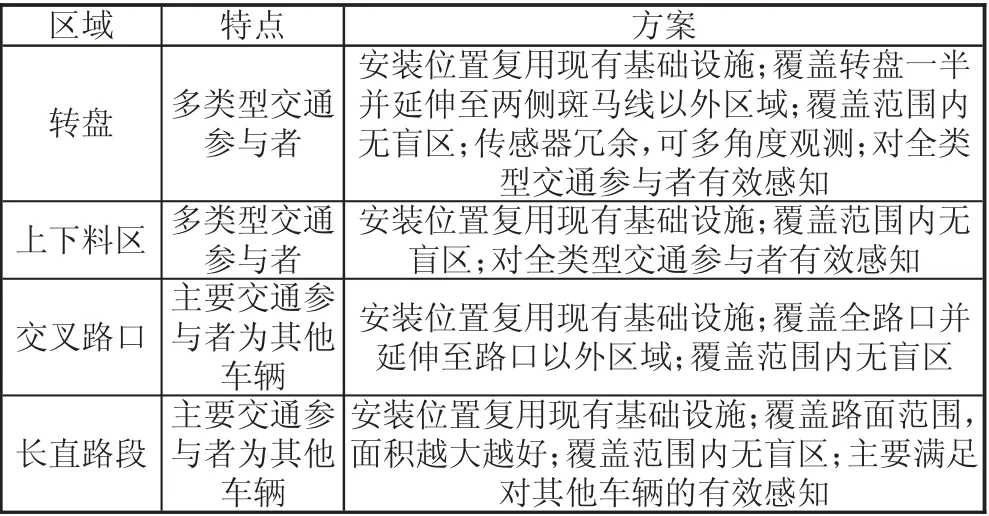
表2 方案分析
2.1.2 场景描述
方案具体要求实现基础循迹、前向碰撞减速停车避让、路口碰撞避让和跟车行驶四大功能[3]。
1)基础循迹。云控平台根据路侧数据及车辆上报数据,判断是否存在交通参与者干涉;云控平台下发控车指令,指挥车辆按照预设轨迹点行驶,行驶方式包括直线行驶、交叉路口90°左转、交叉路口90°右转、变道;主车行驶速度不高于对应道路环境下地最大车速、加/减速度等,例如交叉路口速度不高于15 km/h 等。
2)前向碰撞减速停车避让。云控平台下发控车指令,主车按照设定的减速度进行减速停车,并在距离交通参与者目标安全距离外停车;主车所在车车道前方视距范围出现交通参与者,云控下发减速停车指令或紧急停车指令,引导车辆在安全距离外停车。
3)路口碰撞避让。若其他交通参与者为机动车辆,机动车辆与主车存在干涉;云端控制主车进入减速停车模式,控制主车停在路口斑马线或人行横道外,停车位置距斑马线距离1.5 m 左右,进入等待模式。如果主车未能按要求减速停车,则进入紧急制动停车模式。等待其他机动车辆驶离路口,且无其他干涉,云控控制主车切换至基础循迹功能,驶入交叉路口;主车离开交叉路口,车辆切换至基础循迹功能。弱势交通参与者与主车存在干涉。云控控制主车进入减速停车模式(停车位置距斑马线距离2 m 左右);弱势交通参与者与主车干涉消失,且无其他干涉,控制主车切换至基础循迹模式驶入交叉路口;主车驶离交叉路口,切换至基础循迹模式。
4)跟车行驶。云控平台根据主车当前车速,控制主车进行加速或减速,保持住主车与目标车一致,且两者保持一定车距,距离取值为时距对应的直线距离和安全距离的最大值;当目标车车速高于道路环境允许的最高车速时,主车不再跟随行驶。
2.2 安装点位
1)检测路线范围:在确定所需要检测路线的情况下,应尽可能以全覆盖的形式进行布置点位,确保全路线覆盖、无盲区。
2)重点检测区域:对于一些路况复杂、车辆行人流动较大的地方,应设置点位进行重点检测,如物流上下料区、转盘路口、车辆行人密集流经路口等区域。
3)设备检测能力:不同品牌、型号的激光雷达、摄像头的检测能力是有区别的,如速腾RS-LiDAR-32机械式激光雷达测距能力是200 m,精度为±3 cm;RS-LiDAR-16 机械式激光雷达测距能力是150 m,精度为±2 cm。因此要根据设备的检测能力选择点位。
4)安装难度:在不影响正常检测效果的条件下,应尽量选择安装难度较为简单的点位,避免增大后续安装设备的难度。
2.3 网络设计
路侧设备激光雷达与摄像头之间网络形成一个局域网,整个路侧系统联网方式可采用有线局域网和无线局域网两种方式,两种联网方式各有利弊。有线局域网方式网络延迟低、可靠性强、数据传输性能高,但受现场环境影响,光纤布线很耗精力和时间;无线局域网可靠性和传输能力均没有有线局域网高,但灵活性好。
2.4 测试
针对路侧摄像头和激光雷达的融合方案,对目标检测的功能和性能进行测试。测试内容分为感知能力的测试,定位能力的测试,以及路侧系统(从感知到目标识别)的延时情况测试。
前置条件:设备状态正常无干扰,光照天气条件正常(户外路测环境照度不小于2 000 lx)、网络通讯正常、视频流正常,如表3、表4 所示。

表3 测试指标

表4 测试内容
2.5 测试结果(见表5)
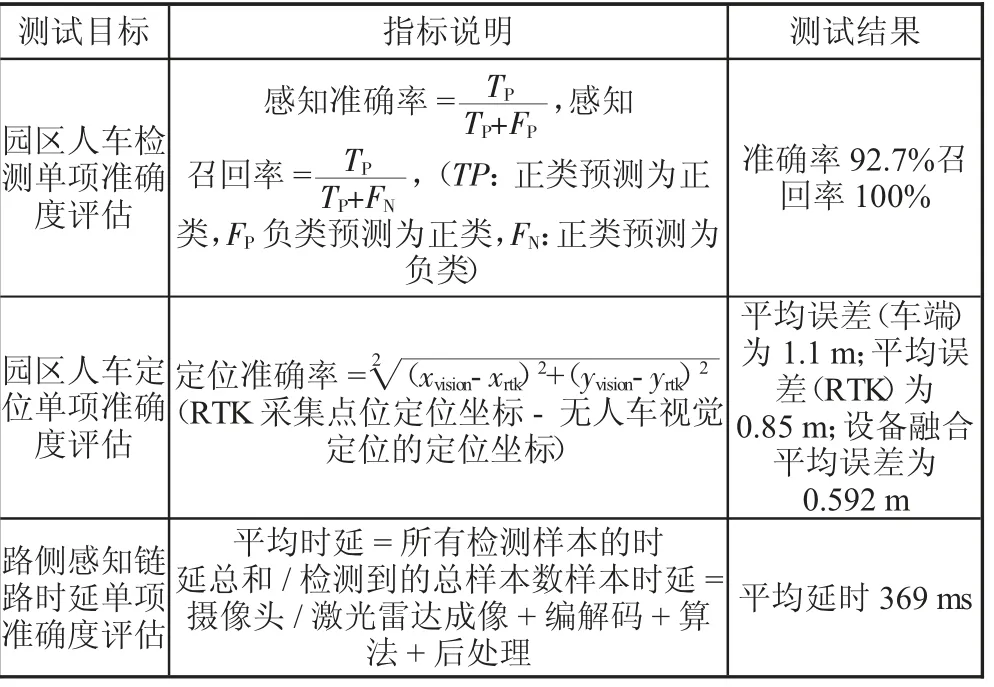
表5 测试结果
3 结语
智慧交通发展以来,路侧基础设施建设的价值备受人们质疑。因此,发展路侧感知的同时更要发挥它的价值。在无人物流中,路侧感知具有以下几个方面的优势:
1)路侧感知的一个重要作用就是让无人物流车获得超视距感知的能力,因为路侧传感器安装在高处,视野开阔且感知的范围也越大,可以弥补车载传感器的感知不足,同时对环境的感知也更为准确。路侧传感器将感知的环境信息传给无人车,以便其做出决策,提高无人物流车的行驶安全性。
2)由于无人物流车上需要安装多个传感器,这无疑增加了单台车的成本,而将部分感知交给路侧传感器,就可以降低车载传感器数量和计算平台的需求,在无人物流车较多的情况下,可以有效降低其实现成本。
3)有利于实现统一决策,实施一定范围内的车辆协同调度,如车辆的编队行驶;根据路径优化算法开展车辆导航调度,以避免无人物流车的拥堵及其进一步恶化。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
石油沥青(2019年2期)2019-04-28 08:42:24
电子测试(2018年15期)2018-09-26 06:01:14
时代汽车(2018年4期)2018-05-31 02:53:08
山东青年(2017年7期)2018-01-11 16:09:15
电子制作(2017年1期)2017-05-17 03:54:20
电子制作(2016年11期)2016-11-07 08:43:49
汽车文摘(2015年1期)2016-01-13 03:54:03
汽车文摘(2015年11期)2015-12-02 03:02:52
机械与电子(2014年2期)2014-02-28 02:07:42
