基于改进DQN算法的NPC行进路线规划研究
2022-08-02 08:27刘森,李玺,黄运
无线电工程 2022年8期
刘 森,李 玺,黄 运
(1.河北远东通信系统工程有限公司, 河北 石家庄 050200;2.陆军工程大学石家庄校区,河北 石家庄 050000;3.中国人民解放军32620部队,青海 西宁 810007)
0 引言
在军事游戏或仿真训练系统中,非玩家角色(No-player Character,NPC)的智能化水平在很大程度上决定了模拟训练的效果。构建NPC的核心是进行行为建模。行为建模分为认知行为建模和物理行为建模,行进路线的规划则是NPC物理行为建模的重要组成部分。传统的NPC行进路线规划主要采用固定路线或利用有限状态机、行为树构建脚本等方式。前者相对比较原始,很难有效提升模拟训练的效果,后者具有一定的智能性,但是面对复杂多变的战场环境往往不能灵活应对。本文针对上述问题开展研究,利用强化学习(Reinforcement Learning,RL)的方法设计NPC行进路线规划算法,实现NPC行进路线的智能化选择。
近年来,深度学习(Deep Learning,DL)和RL相结合产生的深度强化学习(Deep Reinforcement Learning,DRL),使传统的RL扩展到高维度状态空间和高维度动作空间等以前无法解决的领域[1]。特别是Mnih等人[2]提出的深度Q网络(Deep Q-Network,DQN)将DRL的研究推向新的高度。目前,各国学者利用DRL在机器人控制[3-4]、游戏[5]和无人驾驶[6-7]等领域开展了广泛而深入的研究。其中,基于DRL的路线规划研究[8-14]也是热点之一,同时也是多领域的基础应用研究内容。
上述研究多关注于如何进行避障,而在此基础上如何实现最优路线的选择研究较少。另外,由于DQN算法在经验回放时采用均匀的采样方法,不利于算法的收敛。本文针对DQN算法收敛性差和最优路线选取问题进行改进,提出PRDQN算法。该算法利用基于SumTree的优先经验回放方法取代了DQN算法的均匀采样回放机制,并重新设计了奖励函数。实验证明,该算法相对于DQN算法不仅提高了收敛速度,而且实现了路线的优化。
1 PRDQN算法
1.1 Q-learning算法
Q-learning是RL的经典算法,核心是智能体通过与环境的不断交互学习,更新和完善Q-table,以达到智能决策的目的。Q-table的行代表状态,列代表行动,表格的数值即Q-value是在不同状态下采取相应行动时能够获得的最大的未来期望奖励。Q-learning算法利用式(1)来计算Q-value:
Q(st,at)=Q(st,at)+
α[rt+γmaxQ(st+1,at+1)-Q(st,at)]。
(1)
式(1)展开可得:
Q(st,at)=(1-α)Q(st,at)+
α[rt+γmaxQ(st+1,at+1)]。
(2)
将式(2)进行迭代,得:
Q(st,at)=(1-α)Q(st,at)+α[rt+γmaxQ(st+1,at+1)]=
(1-α){(1-α)Q(st,at)+
α[rt+γmaxQ(st+1,at+1)]}+
α[rt+γmaxQ(st+1,at+1)]=
(1-α)2Q(st,at)+
[1-(1-α)2][rt+γmaxQ(st+1,at+1)]=
…=
(1-α)nQ(st,at)+
[1-(1-α)n][rt+γmaxQ(st+1,at+1)],
(3)
式中,st为t时刻的状态;at为t时刻采取的行动;st+1为t+1时刻的状态;at+1为t+1时刻采取的动作;Q(st,at)为st状态下采用行动at的值函数;α为学习率;rt为t时刻已经获得的奖励;γ为衰减因子。由于α∈(0,1),因此0<α-1<1,当n→∞时,(1-α)n→0,则式(3)可变为:
Q(st,at)=rt+γmaxQ(st+1,at+1)。
(4)
式(4)即是在各类程序中,计算st状态下采用行动at的Q值公式。
利用Q-learning算法实现RL简单明了,并且不存在收敛性的问题。但是,当状态空间S和行动空间A足够大时,Q-table会变得非常大,从而导致维数灾难。因此,纯粹的Q-learning算法很少用于解决现实中的各类应用问题。
1.2 DQN算法
针对Q-learning算法存在的维数灾难问题,DeepMind团队的Mnih等人将深度卷积神经网络和Q-learning结合,利用卷积神经网络动态生成Q-table,不仅避免了复杂空间的维数灾难,而且在一定程度上解决了非线性函数近似表示值函数的不稳定问题。
DQN算法示意如图1所示,算法定义了2个相对独立且结构相同的网络,分别是训练网络(TrainingNet)和目标网络(TargetNet)。利用Q-learning算法,智能体通过与环境的交互,实现训练网络的学习。经过固定步数的训练后,将训练网络中的参数全部赋值给目标网络。设置经验回放单元的目的是减少训练样本的相关行,改善神经网络逼近强化学习的动作值函数不稳定的问题。每次训练时从经验库中均匀选取一批样本与训练样本混合在一起,破坏相邻训练样本的相关性,提高样本的利用率。

图1 DQN算法示意Fig.1 Schematic diagram of DQN algorithm
DQN的损失函数是目标网络的Q-value与评估网络的Q-value差的平方值,表示为:
LOSSt=(targetQt-Q(st,at,wt))2,
(5)
式中,targetQ根据式(4)可得:
targetQt=rt+γmaxQ′(st+1,at+1,wt+1),
(6)
w为网络参数,采用梯度下降法学习:
wt+1=wt+E[targetQt-Q(st,at,wt)]Q(st,at,wt)。
(7)
1.3 改进算法
传统的DQN算法利用经验回放机制,阻断了训练样本的相关行,改善了不稳定的问题,但是采用均匀采样的方式不利于算法的收敛。另外,DQN算法奖励函数设置的比较简单,往往不能实现最优路线的规划。本文针对经验回放和奖励函数进行了改进,提出了PRDQN算法。
1.3.1 基于SumTree的优先经验回放
SumTree采用二叉树结构,如图2所示。节点存储的是样本的优先级(Priority),数值越大,优先级越高,通过这种方式可以让好的样本重复利用的几率更大。SumTree中,只有叶子节点代表具体样本,非叶子节点没有实际意义,父节点的优先级是子节点优先级的和。叶子节点的优先级通过TD-error[15-17]确定,TD-error是样本在利用时序差分(Temporal Difference,TD)更新时目标网络值函数与训练网络值函数的差值,本文TD-error的值采用损失函数值,如式(5)所示。差值越大说明预测精度还有较大的上升空间,被训练的价值就越大,因此优先级越高。叶子节点下面的数值代表该样本对应的数值区间,优先级高的叶子节点对应的数值区间大,在均匀采样的过程中被选中的概率就高。SumTree的算法实现如算法1所示。

图2 SumTree示意Fig.2 Schematic diagram of SumTree

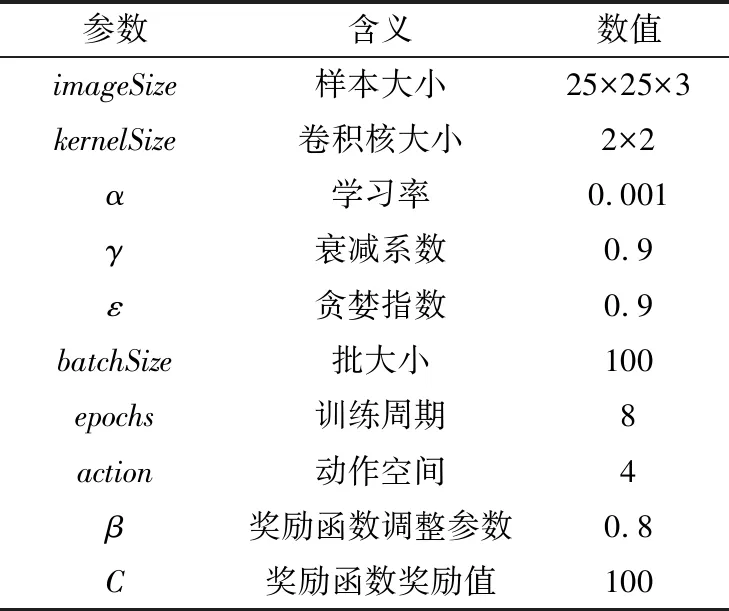
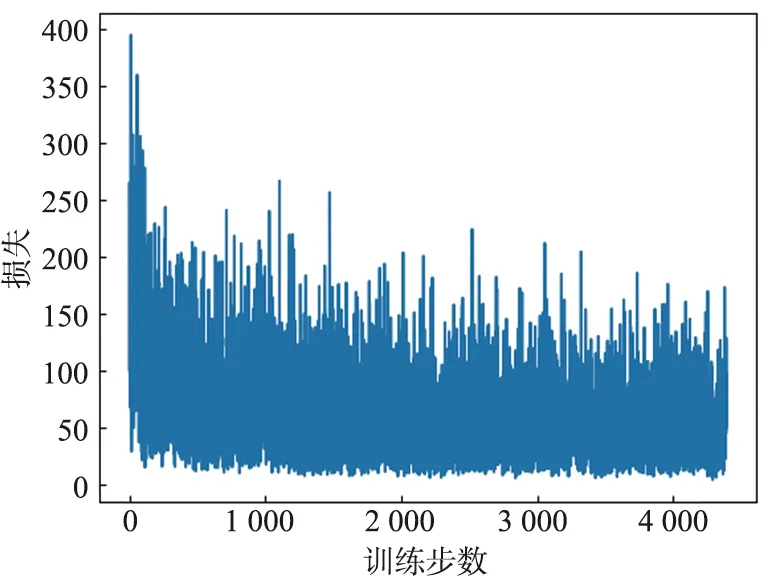
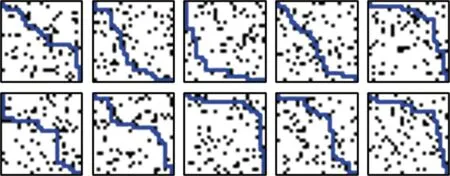
算法1:SumTree算法1) Def SumTree(节点)2) if节点==叶子节点3) ifPriority节点 以图2为例,假如从(0,52)中抽取样本S=25,则从SumTree的根节点0开始,由于左子节点1的优先级为22,小于25,所以选择右子节点2,同时S=25-22=3,然后判断节点2的左子节点5的优先级值是否大于3,依次判断下去,最后选择节点12。 1.3.2 奖励函数的设计 在RL过程中,智能体在与环境的交互中能够获得奖励,驱使智能体在不断的尝试中选择获得奖励多的行为策略。传统的DQN算法奖励函数的设置如下: (8) 式中,C通常为正整数。可以看出,除去到达目的地和发生碰撞外,其他情况下智能体获得的奖励都是0,通过大量训练虽然能够使智能体到达目的地,但是无法获取最优路线。为此,本文重新设计奖励函数,在没有到达目的地或发生碰撞时,判断下一个行动到达的点中哪一个距离终点距离更近,距离最近的点对应的行动奖励设为βC: (9) 式中,与目的地的距离通过欧式距离公式计算得出,即: (10) 式中,x(x1,x2,…,xn)是当前位置坐标;y(y1,y2,…,yn)是目的地坐标。 1.3.3 算法描述 本文提出的PRDQN算法流程如下。 算法2:PRDQN算法1) 生成训练数据集2) 初始化设置,利用CNN生成训练网络(TrainingNet)和目标网络(TargetNet)3) 生成初始Q-table4) 训练网络5) 设置epochs,batchsize等相关变量6) while count 为了验证算法的有效性,本文设计了如下实验。随机生成200张25 pixel×25 pixel的图片作为NPC行进训练地图,每张图根据不同的起点,再生成25×25=625张图片,共计125 000张,图中随机生成若干黑色像素点代表地图中的障碍。NPC从左上角的像素点[0,0]出发,到达右下角的像素点[24,24]则完成路线规划,中途碰到障碍则失败。实验软件环境:python 3.8,tensorflow 2.4.0,pycharm 2020.3.2。 本文设计了2层卷积网络加2层全连接网络的结构,卷积核大小为2*2,由于图像包含3个通道,因此卷积核的厚度为3,第1次卷积包含10个卷积核,第2次卷积包含20个卷积核,第1层全连接层包含100个神经元,第2层全连接层包含2个神经元,生成的网络结构如图3所示。 图3 算法中深度卷积网络的处理过程Fig.3 Processing flow of deep convolution network in the algorithm 实验程序参数设置如表1所示。 表1 参数设置表Tab.1 Parameter setting 训练过程中的参数变化如图4所示。横轴代表w值,纵轴代表的是分布数量,每个切片代表在当前训练步数下w值的分布情况。 使用同样的训练集,分别对传统DQN算法和PRDQN算法进行训练,损失函数的变化情况如图5所示。 从图5的实验结果可以看出,本文提出的PRDQN算法在收敛性上要好于传统DQN算法,在训练步数到达1 000时,就可以将损失函数值稳定地控制在30以下。 训练完成之后,随机生成10张测试用图,对传统DQN算法和PRDQN算法进行测试,结果如图6所示。 从图6的实验结果可以看出,PRDQN算法生成的规划路线基本沿图像对角线方向,从行进的角度来说,利于NPC在最短的时间内到达指定地点,不仅实现了路线规划,而且优化了行进路线。传统DQN算法虽然也能够完成路线规划,但是路线明显比较曲折。 (a) 第1卷积层的w值 (a) 传统DQN算法 (a) 传统DQN算法的测试效果 本文改进了传统DQN算法的经验回放机制和奖励函数,设计了PRDQN算法。该算法基于TD-error为经验回放单元中的样本设置优先级,并利用SumTree算法实现了优先级经验回放机制。同时,根据NPC行进的需求,重新设计了奖励函数。实验证明,PRDQN算法在收敛性和最优路线规划方面都优于传统的DQN算法。 目前,算法应用于二维地图中,动作空间限于二维空间。在三维仿真训练系统中,行为策略将在三维空间中展开,需要针对奖励函数做进一步改进,考虑地形起伏等更多维度的因素对NPC行进的影响。
2 实验及结果分析


3 结束语
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02北京航空航天大学学报(2021年9期)2021-11-02计算机系统应用(2021年9期)2021-10-11中学生数理化(高中版.高一使用)(2021年2期)2021-03-19小哥白尼(神奇星球)(2021年12期)2021-03-08电子制作(2019年11期)2019-07-04领导决策信息(2018年16期)2018-09-27小猕猴智力画刊(2018年3期)2018-06-12数学学习与研究(2017年3期)2017-03-09小学生导刊(低年级)(2016年8期)2016-09-24