基于高阶滑模的自适应Super-Twisting控制系统设计
2022-08-02 11:01张旭中翟道远
计算机测量与控制 2022年7期
张旭中,翟道远
(中国科学院湖州应用技术研究与产业化中心,浙江 湖州 313000)
0 引言
滑模控制是一种非线性反馈控制方法,该种方法的鲁棒性较强,在理想状态下,控制系统中的控制器可在一定时间内切换控制信号,将其从一种状态切换到另一种状态,然而在切换过程中,控制器很容易出现抖动情况,导致系统中其他硬件损坏,使系统处于不稳定状态。为了减弱抖振情况,并确保系统具有较强的鲁棒性,国内的专家学者们展开了相关的研究[1-2]。
有学者利用二阶滑模算法设计了自适应Super-Twisting控制系统,该系统利用二阶滑模算法提取了导数的边界值,根据导数边界值的范围识别出控制系统需要的控制参数,通过该参数实现自适应Super-Twisting的控制,该系统的鲁棒性较好,但在应用过程中,控制参数的精度很难保证,从而使控制系统的动态性能较差[3]。
还有学者提出了基于二次型Lyapunov函数的自适应Super-Twisting控制系统,该系统利用二次型Lyapunov函数建立了Super-Twisting控制模型,在模型受常值干扰的条件下,对Super-Twisting进行收敛分析,通过对控制模型优化计算出Super-Twisting收敛的时间,该系统在实现过程中由于缺少硬件设备极易受到不确定干扰,从而导致导数边界未知,对系统中存在的抖振情况不能有效削弱,对Super-Twisting的控制效果较差[4]。
本文为了加强对抖振情况的削弱,设计了基于高阶滑模的自适应Super-Twisting控制系统。分析了高阶滑模控制理论的工作原理,将这一技术应用到控制模块中,通过引入常规线性控制方式和自适应控制方法,优化系统的控制模块,在确定输入信号和输出信号的具体形式后,完成Super-Twisting控制,以两轮自平衡车为研究对象,进行实验仿真,验证控制系统的有效性。
1 自适应Super-Twisting控制系统硬件设计
1.1 采集模块设计
采集模块的核心设备为三星公司生产的AD8036采集器,该款采集器的采样频率较高,最高可达到120 MHz,额定采样速率为80 bit/s,控制信号经过A/D模数转换后,该款采集器的采样速率能提高到140 bit/s,Super-Twisting在经过滑模控制后,其控制参数由于导数边界未知,控制参数的大小会受到控制信号的影响而降低,为此采集模块需要先对控制信号进行调理,调理完成后再采集Super-Twisting的控制参数[5-6]。采集模块结构如图1所示。

图1 采集模块结构
观察图1可知,利用DM9000芯片连接RJ45实现信号的调理。利用TD公司生产的TD6372实现对控制信号的调理,将控制信号控制在ADC转换的电流范围内,TD6372是一种放大器,可以快速且准确地进行脉冲响应,具有较高的分辨率,可作为ADC的缓冲器,ADC为双通道模数转换器,性能好、功耗低,利用TD6372放大器对控制信号调理时,先通过ADC进行模数转换,转换完成后,对控制信号进行偏移匹配,完成后即完成控制信号的调理,再由采集器在导数边界未知的情况下,采集Super-Twisting的控制参数[7-8]。
1.2 存储模块设计
采集模块采集完成Super-Twisting控制参数数据后,这时如果控制系统不能及时接收该控制参数数据,导数边界数据会立刻更新而取代控制参数数据,导致控制参数数据丢失,为此必须对采集完成的控制参数数据进行高速存储[9]。存储模块结构如图2所示。

图2 存储模块结构
观察图2可知,存储模块的核心设备为TD公司生产的TDB7659存储器,该存储器存储容量较大,一次可存储256 kB的数据,缓存速率能达到128 Mbit/s,在存储器存储控制参数数据时,地址发生器能按顺序地进行输入和输出参数,并能按不同的速度读写参数数据。存储模块内部设置了FIFO器件,该器件为SN74ACT7804,具有较高的存储速度,最高可达50 MHz,在访问控制参数数据时时间可缩短为15 ns,该FIFO器件可协助存储器缓存参数数据[10-12]。
存储模块的工作原理为:控制参数数据经过USB接口传输到存储模块后,经过电路传输到FIFO器件上,经过FIFO的缓存后,再通过存储器进行数据写入与读写,同时由存储器进行永久存储。
1.3 控制模块设计
通过高阶滑模实现控制,不仅能够保留传统滑膜控制的优点,提高控制精度,同时也可以防止出现抖动。控制模块引入了滑模控制器。滑模控制采用的非线性控制方法具有很强的鲁棒性,通过采集器获得被控制的对象和参数。选取的滑模动态不会受到对象动态特征参数和扰动影响,因此滑模能够在短时间内实现快速响应,完成参数变化的在线识别。
为了更好地消除滑模控制,利用饱和函数完成边界层的动态控制,在边界层中加入了正常的滑模控制,通过将边界层连续控制完成信息反馈,在反复调整边界层厚度后,缩小厚度,加强控制效果。
微控制器是控制模块的核心设备,该款控制器是由TI公司生产的功耗低、性能好的MSC1210控制器,其时钟频率最高可达40 MHz,单周期指令执行速度为6 m/s,其执行速度是8 051的三倍,同时,该款微控制器设有闪存存储器,存储容量为16 kB,在电压较低时,可进行串行或并行编程,能够进行低压检测,此外,存储模块具有若干个端口,包括:SPI端口、SDI端口、UART端口、USB端口等。控制模块端口结构如图3所示。

图3 控制模块端口结构图
D/A转换器选用三星公司生产的DAC8531,该款转换器功耗较低、单路,属于16位缓冲电压输出,D/A转换器的时钟转换频率最高为45 MHz,电压工作范围为2.5~8.5 V,通过 D/A转换器,将单片机输出的控制参数中的数字量转化成模拟信号,进入信号输入通道。信号输入通道为16路,可反映控制系统的电源状态、负载状态、电压状态、电流状态等,信号输入通道后,可对其进行信号调理,调理结束后由信号输出通道输出,信号输出通道可启动复位信号、极性信号等[13]。
通过常规线性控制方式完成滑模分析,加强控制量增益来消除外界所带来的干扰。本文在控制模块中加入了观测器,通过观测器分析外界的不确定干扰,实现信息控制,从而消除存在的抖振。观测器能够对外界的扰动状态进行估计,根据估计结果得出合适的优化策略,根据系统状态量的考虑结果,直接分析被控制对象的负载力,实现扰动分析。
为更好地完成信息控制,本文在控制模块中引入了自适应方法,在控制过程中,增益不再设定为常数,能够根据系统的运行状态完成随时调整,即使系统没有达到滑动模态时,也能够增加增益,从而完成快速收敛,实现控制工作。
1.4 电路模块设计
电源模块的电压芯片为SW1600,该芯片的核心电压为8.0 V,幅值较低,额定电流为4.2 A,要求具有较好的散热功能。电源模块电路图如图4所示。
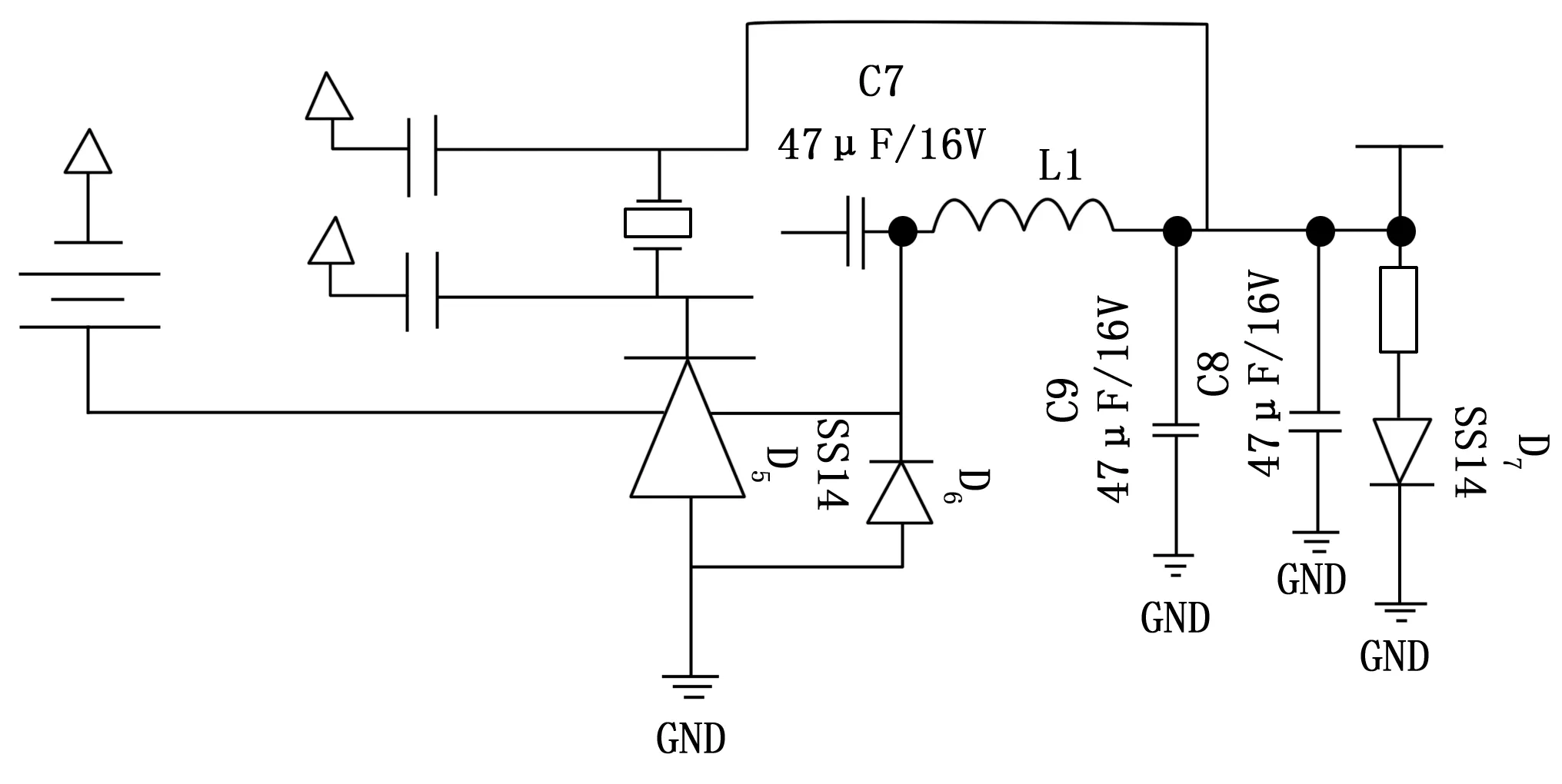
图4 电源模块电路图
电源模块的输出电流为3.2 A,电压波动范围为1.2~8.1 V,系统中如果采集模块、存储模块、控制模块同时进行工作,所需要的电压由电源模块按需进行分配,电源模块中主供供电电压为13 V,当对各个模块分配所需电压时,电源模块选择集成电源模块,该模块电流大,输入与输出压差可提高电压的转换效率,根据各个模块的电压需求,对各个模块的核心电压进行上电控制[14]。
2 自适应Super-Twisting控制系统软件设计
在完成硬件设计后,引入高阶滑模理论设计软件程序。滑模控制为一种非线性控制方法,其结构较为简单,对参数及各类不确定干扰因素都不敏感,具有较好的鲁棒性,广泛应用于各种控制系统中[15-17]。本文采用高阶滑模,主要通过该种算法设计Super-Twisting控制器,以实现Super-Twisting的自适应控制。
基于高阶滑模的自适应Super-Twisting控制系统软件流程如图5所示。

图5 基于高阶滑模的自适应Super-Twisting控制系统软件流程
首先,由主程序完成系统的初始化。系统中的主程序主要负责对控制系统中的硬件电路进行初始化,消除时钟的延时,合成频率,并调整时钟相位,同步到控制芯片上,以此实现控制芯片内、外时钟控制的一体化。在初始化过程中,ADC将采集器提供的80 MHz时钟信号合成为16 MHz、75 MHz的时钟并进行逻辑处理,控制程序对参数数据的读写速度可调整到30 bit/s,通过输出通道进行输出[18]。采集信号通过虚拟控制定律可以得到,采集过程得到的信号能够实现反步迭代控制,信号输出模式为非线性模式,满足虚拟控制规律。采集信号与输出信号的模式如图6所示。

图6 采集信号与输出信号模式
根据图6可知,数据的个数在不断增加,最后达到50×104,数据数值的波动定点最高能够达到4 800,波动时间间隔为10×104,采集端信号与输出端信号存在较大的差异,采集端的信号模式为不规则模式,呈现明显的不规则波动,而输出端信号能够保证信号与标准方式运行。
然后,设计Super-Twisting 控制器。Super-Twisting滑模控制是在高阶滑模理论下实现,属于2-滑动控制器,将采集程序采集的控制参数数据转换为系统的控制量,将该控制量应用到导数中,通过下式进行表示:
(1)
式中,u表示由采集程序采集的参数控制量;x表示Super-Twisting滑模控制的收敛量;y表示输入状态量;a,b,c分别表示增益函数、未知函数与滑动变量函数;t表示动态量。
本文研究的Super-Twisting控制系统阶数设定为1,这样能够确保系统在运行过程中的连续性,防止出现滑模控制的抖振问题,分析Super-Twisting在公式(1)中的变量函数的平滑变量方式,与传统的Twisting算法相比,Super-Twisting能够在短时间内实现滑模变量收敛,从而消除抖振问题。
通过滑动阶完成连续求导,分析运动动态的平滑度,确定约束条件,完成精准定义,在轨迹状态的交界处确定二阶滑模的动态形式,增加系统的鲁棒性,防止系统出现抖动。在SOS相平面上,设置有效的原点,确保系统是否能够围绕原点轨迹完成旋转,在有限的时间内,实现环绕收敛,在多次收敛中,确保系统能够恢复到原点。
Super-Twisting能够利用切换装置完成信息切换,实现理想的切换,在控制过程中,设定控制量能够通过正常的方式显示在S中,使滑模面在工作过程中不会受到限制。

(2)
式中,u1表示控制系统中的反馈控制量;K表示特定增益;sgn(y)为符号函数。
利用二阶滑模控制来消除系统运行过程的抖振,使系统能够维持二阶滑动状态,在有限的时间内完成信息收敛,系统运行过程中会存在多次收敛,因此能够实现分析。
最后,进行自适应控制。该Twisting控制器不需要设置变量导数,只要保证在进行自适应控制与收敛时,滑动面的稳定性处于标准范围即可[20-21]。当特定增益K增大到足够大时,可形成STSM控制器,该控制器是一个指数较为稳定的控制器,可协助Super-Twisting进行自适应控制,本文设计的自适应Super-Twisting滑模控制律ui如下:
(3)
式中,l表示状态估计变量;b0表示切换增益;-uj表示抖振变量;-uj表示常数[22-23]。
根据上述过程实现Super-Twisting控制,完成信息分析,通过高阶滑模控制改变信息在控制过程中存在缺陷定点改善,提高系统的运行能力[24-25]。
3 实验研究
为了验证本文设计的基于高阶滑模的自适应Super-Twisting控制系统的有效性,选用本文设计的系统与传统的基于二阶滑模算法的自适应Super-Twisting控制系统、基于二次型Lyapunov函数的自适应Super-Twisting控制系统进行实验对比。
本文选用的控制对象为两轮自平衡车,作为一种欠驱动系统,两轮自平衡车以一种非线性模式运行,能够完成不稳定工作,因此使用这种方法验证系统的实际应用效果。
为验证本文所设计的基于高阶滑动模态的自适应Super-Twisting控制系统的有效性,选取了基于二阶 Lyapunov的自适应滑动模态控制器。试验对比Super-Twisting控制系统的性能。
选用的实验仿真参数如表1所示。

表1 实验仿真参数
根据上述参数,进行仿真对比实验。
选用本文控制系统和传统控制系统进行对比实验,分别对信号的电流、位置和速度进行控制,得到的控制响应时间实验结果如表2所示。

表2 控制响应时间
根据表2可知,在10次实验中,3种系统的响应时间不同,本文所讨论的基于高阶滑模的自适应Super-Twisting控制系统的响应时间均不超过0.1 s,具有很好的控制效果,而基于高阶滑模的自适应Super-Twisting控制系统,其响应时间为2~3 s,以二阶李雅普诺夫函数为基础,其响应时间为3~4 s。由此可见,本文提出的控制系统控制能力更强,能够在短时间内实现响应,具备实时响应能力。
在确定控制响应时间后,对控制精度进行分析,同时使用基于高阶滑动模态的自适应Super-Twisting控制系统、基于二次型Lyapunov函数的自适应Super-Twisting控制系统和基于二阶 Lyapunov的自适应滑动模态控制器,对两轮自平衡车进行平衡控制,并通过仿真对比,完成实验,记录电流控制精度、位置控制精度和速度控制精度。
分析图7可知,标准电流波动范围在-42~42 A之间,基于二阶滑模算法的自适应Super-Twisting控制系统的电流波动范围在-24~24 A之间,基于二次型Lyapunov函数的自适应Super-Twisting控制系统波动范围在-36~36 A之间,本文提出的基于高阶滑模的自适应Super-Twisting控制系统电流波动范围在-40~40 A之间。由此可见,本文提出的控制系统控制时间与标准值最为接近,控制能力最好。

图7 电流控制结果
分析图8可知,随着时间的增加,控制角度也会逐渐增大,而基于二阶滑模算法的自适应Super-Twisting控制系统的偏离角度最大,当控制时间为5 s时,偏离角度为0.8°,基于二次型Lyapunov函数的自适应Super-Twisting控制系统的偏离角度为0.65°,本文提出的基于高阶滑模的自适应Super-Twisting控制系统的偏离角度仅为0.1°,能够保证系统正常运行。

图8 位置控制结果
分析图9可知,在10~15 s之间速度出现一个峰值,要想对其进行控制,确保控制效果与标准值相符合较为困难。文中采用了基于高阶滑动模态的自适应Super-Twisting控制系统,在5 rpm范围内实现。在此基础上,基于二阶滑模算法的自适应Super-Twisting控制系统明显低于标准,接近25 rpm。第二级 Lyapunov功能自适应Super-Twisting控制系统的标定大于10 rpm。

图9 速度控制结果
综上所述,基于高阶滑动模态的自适应Super-Twisting控制系统、基于二次型Lyapunov函数的自适应Super-Twisting控制系统和基于二阶 Lyapunov的自适应滑动模态控制器都能够使自适应平衡车达到平衡状态,可是在性能上却存在明显差异,本文提出的系统与传统滑模方式相比,控制的精度明显提高,系统的整体响应能力更强,能够在短时间内调整状态,完成响应。3种系统的控制性能如表3所示。

表3 系统控制能力实验结果
根据表3可知,在使用3种滑模控制系统后,两轮自平衡车显现出不同的性能。使用基于二次型Lyapunov函数的自适应Super-Twisting控制系统后,平衡车仍然存在抖振,即使系统步入稳态后,这种抖振现象都没有得以缩减,而基于二阶 Lyapunov的自适应滑动模态控制器在减小抖振方面明显优于基于二次型Lyapunov函数的自适应Super-Twisting控制系统,但是系统所选取的参数采用试凑法选择,受到的制约因素较多,尤其是在存在干扰状态下,控制性能较弱。本文提出的控制系统在不受外界干扰影响,利用高阶滑模完成控制,使两轮自平衡车在运行过程中抖振现象得以明显减小。
本文提出的系统整体控制能力较强,在无法确定是否存在干扰下,仍然能够获得动态性能,从而展示系统较好的鲁棒性,在实际应用工程中具有很好的适用性。
4 结束语
为了解决传统控制系统出现的问题,本文设计了基于高阶滑模的自适应Super-Twisting控制系统,在运用高阶滑模理论的情况下,实现了Super-Twisting的自适应控制,系统具有较好的鲁棒性与应用效果,可以削弱系统中存在的抖振。本文引入了高阶滑模理论,在确定滑模控制原理后,完善控制模块,使控制模块能够当作微分器使用,提高系统的鲁棒性。在仿真实验中,本文设计的系统展示出优异的控制性能,对于之后研究观测器,提供了重要的理论基础。但是本文系统在应用过程中忽视了采样周期对于控制性能的影响,缺少对信号频率的考虑,为了利用微分器提高滑块速度,而忽略了噪声影响,牺牲了积分消除运算,容易出现不稳定。
由此可见,本文系统还需要更多的完善,在下次的研究中,将重点对使用Super-Twisting的稳定性进行分析,根据扰动理论和控制理论将扰动观测器与控制器结合,防止外界干扰降低系统的鲁棒性,引入自适应思想来提高系统的观测能力,增强鲁棒性。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
西部交通科技(2022年2期)2022-04-27
科技研究·理论版(2021年22期)2021-04-18
电机与控制学报(2019年10期)2019-12-03
速读·上旬(2019年2期)2019-10-21
数学学习与研究(2017年20期)2018-01-02
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
科技视界(2016年16期)2016-06-29
中学数学杂志(初中版)(2016年3期)2016-06-24